1.本发明涉及人工智能网络领域,具体说的是一种人工智能网络控制系统用可移动信号接收器。
背景技术:
2.人工智能是研究用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学,人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等,人工智能从诞生以来,理论和技术日益成熟,应用领域也不断扩大,人工智能研究的一个主要目标是使机器能够胜任一些通常需要人类智能才能完成的复杂工作。
3.而为了让人工智能设备在户外也可以正常的运行,需要为了提供足够的信号连接强度,而现有的信号接收器一般都是固定安装在一个位置,从而使得在部分信号不好的户外环境下,使得人工智能设备的使用会出现一定的问题,从而影响到其使用,对此有必要提出一种人工智能网络控制系统用可移动信号接收器。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种人工智能网络控制系统用可移动信号接收器。
5.本发明解决其技术问题所采用的技术方案是:一种人工智能网络控制系统用可移动信号接收器,包括一个支撑座,所述支撑座的的下表面设置有一个移动机构,位于所述移动机构两侧的支撑座下表面设置有一个定位机构,所述支撑座的上表面设置有一个收纳机构,所述收纳机构与移动机构之间共同设置有一个驱动机构,所述收纳机构一侧的支撑座内部设置有一个固定机构。
6.具体的,所述移动机构包括一个升降槽,所述升降槽开设在支撑座的下表面,所述升降槽内滑动连接有一个升降台,所述升降台的下表面通过轴承转动连接有四根转动杆,四根所述转动杆的下端均贯穿延伸至升降台外且均固定连接有一个支架,四个所述支架的内部均通过转轴转动连接有一个滚轮。
7.具体的,所述定位机构包括两个定位槽,两个所述定位槽关于升降槽呈对称状开设在支撑座的下表面,两个所述定位槽与升降槽之间分别共同贯穿开设有两个连接孔,两个所述定位槽的上端槽壁上均通过轴承转动连接有一根第一螺纹杆,两个所述定位槽内均滑动连接有一根定位杆,两根所述定位杆的上表面均开设有一个第一螺纹槽,两根所述第一螺纹杆的下端分别贯穿延伸至两个第一螺纹槽内,且两根所述第一螺纹杆与两个第一螺纹槽相螺纹连接。
8.具体的,所述收纳机构包括一个收纳槽,所述收纳槽开设在支撑座的上表面,且所述收纳槽内滑动连接有一块安装块,所述安装块的上表面固定连接有一个信号接收器。
9.具体的,所述驱动机构包括一个双头驱动电机,所述双头驱动电机固定安装在位于收纳槽与升降槽之间的支撑座内,所述双头驱动电机的两端输出端均通过联轴器固定连接有一根第二螺纹杆,对应其中一根所述第二螺纹杆位置的安装块开设有一个螺纹孔,对应另一根所述第二螺纹杆位置的升降台上开设有一个第二螺纹槽,两根所述第二螺纹杆分别与螺纹孔以及第二螺纹槽螺纹连接。
10.具体的,所述固定机构包括一个固定腔,所述固定腔开设在位于收纳槽一侧的支撑座内部,所述固定腔与收纳槽之间贯穿开设有两个固定孔,对应所述固定孔位置的安装块上开设有一个固定槽,所述固定腔内滑动连接有一块固定板,所述固定板对应两个固定孔位置的侧壁上固定连接有两根固定杆,其中一根所述固定杆贯穿固定孔并延伸至固定槽内,所述固定板远离固定杆一侧的侧壁上固定连接有一根拉杆,对应所述拉杆位置的固定腔腔壁上贯穿开设有一个拉孔,所述拉杆远离固定板的一端贯穿延伸至支撑座外,所述拉杆位于支撑座外的一端固定连接有一个把手,所述拉杆位于固定腔内的杆壁上套设有一个弹簧,所述弹簧的其中一端与固定板相抵,所述弹簧的另一端与固定腔的对应腔壁相抵。
11.具体的,两根所述第一螺纹杆的杆壁上均固定套接有一个第一传动轮,对应两个第一传动轮位置的第二螺纹杆杆壁上固定套接有一个第二传动轮,两个所述第一传动轮与一个第二传动轮之间共同传动连接有一个传动带。
12.具体的,两个所述定位槽与两根定位杆均呈矩形设置。
13.本发明的有益效果:(1)本发明所述的一种人工智能网络控制系统用可移动信号接收器,在使用时,首先可以通过滚轮带动支撑座整体移动至需要使用的位置,之后可以启动双头驱动电机带动两根第二螺纹杆转动,而第二螺纹杆通过与第二螺纹槽的配合可以将升降台与滚轮上升至升降槽内,同时并通过传动轮之间的传动带动第一螺纹杆转动,而第一螺纹杆通过与第一螺纹杆的配合驱动定位杆下降并插入泥土中对支撑座进行固定,同时第二螺纹杆可以通过与螺纹孔的配合将安装块与信号接收器上升支撑座外使用,从而方便信号接收器在户外使用。
14.(2)本发明所述的一种人工智能网络控制系统用可移动信号接收器,在使用时,可以通过把手拉动拉杆以及固定板移动,而固定板会带动固定杆拉出固定槽内解除对安装块的固定,从而使得安装块可以带动信号接收器升降,并且在信号接收器升降完成后,可以松开把手,此时弹簧会推动固定板以及固定杆,从而使得固定杆插入固定槽内对安装块进行固定,而安装块通过螺纹孔对第二螺纹杆进行限位,从而使得第二螺纹杆以及双头驱动电机无法进行转动,进而使得安装块、信号接收器、升降台以及定位杆在升降完成后不会出现松动。
附图说明
15.下面结合附图和实施例对本发明进一步说明。
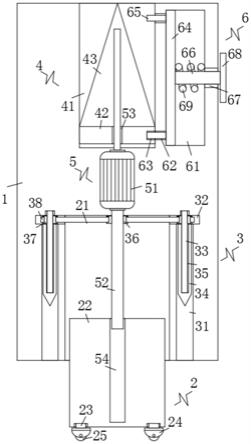
16.图1为本发明提供的一种人工智能网络控制系统用可移动信号接收器的移动状态结构示意图;图2为本发明提供的一种人工智能网络控制系统用可移动信号接收器的调整过程状态结构示意图;
图3为本发明提供的一种人工智能网络控制系统用可移动信号接收器的使用状态结构示意图;图4为本发明提供的一种人工智能网络控制系统用可移动信号接收器的仰视结构剖视图;图5为本发明提供的一种人工智能网络控制系统用可移动信号接收器图2中a部分的放大结构示意图。
17.图中:1、支撑座;2、移动机构;21、升降槽;22、升降台;23、转动杆;24、支架;25、滚轮;3、定位机构;31、定位槽;32、连接孔;33、第一螺纹杆;34、定位杆;35、第一螺纹槽;36、第一传动轮;37、第二传动轮;38、传动带;4、收纳机构;41、收纳槽;42、安装块;43、信号接收器;5、驱动机构;51、双头驱动电机;52、第二螺纹杆;53、螺纹孔;54、第二螺纹槽;6、固定机构;61、固定腔;62、固定孔;63、固定槽;64、固定板;65、固定杆;66、拉杆;67、拉孔;68、把手;69、弹簧。
具体实施方式
18.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
19.如图1
‑
图5所示,本发明所述的一种人工智能网络控制系统用可移动信号接收器,包括一个支撑座1,支撑座1的的下表面设置有一个移动机构2,位于移动机构2两侧的支撑座1下表面设置有一个定位机构3,支撑座1的上表面设置有一个收纳机构4,收纳机构4与移动机构2之间共同设置有一个驱动机构5,收纳机构4一侧的支撑座1内部设置有一个固定机构6。
20.其中,移动机构2包括一个升降槽21,升降槽21开设在支撑座1的下表面,升降槽21内滑动连接有一个升降台22,升降台22的下表面通过轴承转动连接有四根转动杆23,四根转动杆23的下端均贯穿延伸至升降台22外且均固定连接有一个支架24,四个支架24的内部均通过转轴转动连接有一个滚轮25。
21.其中,定位机构3包括两个定位槽31,两个定位槽31关于升降槽21呈对称状开设在支撑座1的下表面,两个定位槽31与升降槽21之间分别共同贯穿开设有两个连接孔32,两个定位槽31的上端槽壁上均通过轴承转动连接有一根第一螺纹杆33,两个定位槽31内均滑动连接有一根定位杆34,两根定位杆34的上表面均开设有一个第一螺纹槽35,两根第一螺纹杆33的下端分别贯穿延伸至两个第一螺纹槽35内,且两根第一螺纹杆33与两个第一螺纹槽35相螺纹连接。
22.其中,收纳机构4包括一个收纳槽41,收纳槽41开设在支撑座1的上表面,且收纳槽41内滑动连接有一块安装块42,安装块42的上表面固定连接有一个信号接收器43。
23.其中,驱动机构5包括一个双头驱动电机51,双头驱动电机51固定安装在位于收纳槽41与升降槽21之间的支撑座1内,双头驱动电机51的两端输出端均通过联轴器固定连接有一根第二螺纹杆52,对应其中一根第二螺纹杆52位置的安装块42开设有一个螺纹孔53,对应另一根第二螺纹杆52位置的升降台22上开设有一个第二螺纹槽54,两根第二螺纹杆52分别与螺纹孔53以及第二螺纹槽54螺纹连接。
24.其中,固定机构6包括一个固定腔61,固定腔61开设在位于收纳槽41一侧的支撑座
1内部,固定腔61与收纳槽41之间贯穿开设有两个固定孔62,对应固定孔62位置的安装块42上开设有一个固定槽63,固定腔61内滑动连接有一块固定板64,固定板64对应两个固定孔62位置的侧壁上固定连接有两根固定杆65,其中一根固定杆65贯穿固定孔62并延伸至固定槽63内,固定板64远离固定杆65一侧的侧壁上固定连接有一根拉杆66,对应拉杆66位置的固定腔61腔壁上贯穿开设有一个拉孔67,拉杆66远离固定板64的一端贯穿延伸至支撑座1外,拉杆66位于支撑座1外的一端固定连接有一个把手68,拉杆66位于固定腔61内的杆壁上套设有一个弹簧69,弹簧69的其中一端与固定板64相抵,弹簧69的另一端与固定腔61的对应腔壁相抵。
25.其中,两根第一螺纹杆33的杆壁上均固定套接有一个第一传动轮36,对应两个第一传动轮36位置的第二螺纹杆52杆壁上固定套接有一个第二传动轮37,两个第一传动轮36与一个第二传动轮37之间共同传动连接有一个传动带38。
26.其中,两个定位槽31与两根定位杆34均呈矩形设置。
27.在使用时,首先可以通过滚轮25在地面上滚动,从而可以带动支撑座1移动至需要使用的位置,之后可以通过把手68拉动拉杆66,拉杆66通过固定板64带动固定杆65移动,从而使得固定杆65脱离固定槽63,进而解除固定杆65对安装块42以及螺纹孔53的的限位,此时可以启动双头驱动电机51,双头驱动电机51带动两根第二螺纹杆52进行转动,而其中一根第二螺纹杆52通过与螺纹孔53的配合可以驱动安装块42以及信号接收器43上升,从而使得信号接收器43上升至支撑座1外,同时安装块42上升至固定槽63与另外一个固定孔62相重合的位置,同时另一根第二螺纹杆52通过与第二螺纹槽54的配合可以驱动升降台22上升,从而使得升降台22以及滚轮25等结构上升至升降槽21中,同时另一根第二螺纹杆52会带动第二传动轮37进行转动,而第二传动轮37会通过传动带8带动两个第一传动轮36进行转动,而两个第一传动轮36会带动两根第一螺纹杆33进行转动,而两根第一螺纹杆33通过与第一螺纹槽35的配合可以驱动定位杆34下降,而定位杆34会下降至支撑座1外并插入户外的泥土中,从而可以对支撑座1进行固定,使得信号接收器43方便移动以及随时在户外进行安装,从而为人工智能设备在户外的使用提供充足的信号。
28.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。