1.本发明涉及测定来自被检体中的氢、磷等的核磁共振(以下称作“nmr”)信号并将核的密度分布、缓和时间分布等图像化的磁共振摄像(以下称作“mri”)装置,特别涉及在利用mri装置的扩散加权成像(dwi)中高精度地修正位置偏离的技术。
背景技术:
2.在mri装置中,作为在图像中出现位置偏离的原因之一,有核磁共振的中心频率的变动。中心频率由静磁场强度决定,通常,静磁场被控制成通过修正线圈(匀场线圈)保持固定的静磁场。但若在使用倾斜磁场线圈使局部的倾斜磁场产生时由于流过倾斜磁场线圈的电流而发热,则对静磁场进行修正的线圈受到物理的影响,有时中心频率发生变动。另外,在静磁场产生磁铁是永磁铁等的情况下,热直接传递到磁铁,由此,有时静磁场改变,中心频率会变动。
3.在作为利用mri装置的摄像法的一种dti(diffusion tensor imaging,弥散张量成像)、dki(diffusion kurtosis imaging,弥散峰度成像)或ivim(intravoxel incoherent motion,体素内不相干运动)等扩散加权成像中,实施利用mpg脉冲的回波平面成像,在倾斜磁场线圈流过大电流。在这样的使用大电流的摄像中,在倾斜磁场线圈产生的热与通常的摄像更多,由于静磁场变动而中心频率发生变动,在摄像中出现位置偏离。作为对中心频率的变动引起的位置偏离进行修正的技术,有预测频率变动并调节匀场线圈的电流的技术等(例如专利文献1)。
4.但在专利文献1记载那样的预测频率变动并进行调节的技术中,难以应对摄像中的急剧的变化。为了应对摄像中的变化,期望在摄像中途随时进行修正,但若在摄像中途进行频率测定,就会有摄像时间拉长的问题。针对此,还提出在摄像中取得导航回波,根据取得的导航回波的相位求取频率变动值的方法(专利文献2)。具体地,从成为基准的导航回波和之后取得的导航回波来算出相位差,使用相位差来算出频率变动值。
5.现有技术文献
6.专利文献
7.专利文献1:jp特开2000
‑
342554号公报
8.专利文献2:jp特开2006
‑
014753号公报
9.在将使用导航回波求取频率变动值的方法运用于上述的扩散成像的情况下,通常,由于mpg脉冲向种种方向施加,会使自旋的相位剧烈变化,相位会与成为基准的导航回波较大不同,难以从相位差算出频率变动值。因此,在扩散成像中,需要比mpg更靠前地取得导航回波。
10.另外,在不断取得导航回波时,存在由于倾斜磁场的涡电流等随时间变化而在导航回波的相位中产生偏移的可能性。该偏移非常小,若使导航回波的回波时间(te)长,则成为作为误差能忽视程度的偏移。但如前述那样,还有在比mpg脉冲更靠前施加导航回波的制约,若在该制约下使导航回波的te长,则dwi的te会变得比通常长。由于dwi基本是t2强调图
像,因此有t2长的组织易于成为高信号的问题(t2 shine through,t2穿透),为了减小该影响,还有使te尽可能短的制约。由于这些制约而不得不使导航回波的te小,上述偏移引起的误差变大。
11.虽然在mpg的施加轴数少的摄像中,能在该误差给位置偏离修正带来影响前完成摄像,但在施加数十轴的dti、dki、ivim等mpg的摄像中,摄像时间拉长,误差蓄积,给位置偏离修正带来影响。其结果,成为摄像条件下指定的分辨率以上的偏离,不再能得到用户所谋求的图像,在解析图像中也会产生伪影、模糊。进而,在低磁场机等中,有时使用被称作chess法的脂肪抑制脉冲,但在该情况下,会由于频率变动而抑制脂肪以外的频率,同样会给解析图像、诊断带来影响。
技术实现要素:
12.本发明目的在于,提供一种mri装置,在采用在摄像中取得导航回波并根据相位变化对频率进行修正的方法时,能不受由于随时间的变化而产生的偏移的影响地高精度进行频率修正。
13.过去,求取从导航回波的产生起到回波时间为止的相位变化量,与此相对,本发明取得收集导航回波的测量时间内的导航回波的相位变化。通过取得与同样求得的基准导航回波的相位变化的差分,能不受偏移的影响地求取与基准的相位变化量。
14.具体地,本发明的mri装置具备:摄像部,其具有在放置被检体的空间产生静磁场的静磁场产生部、对所述被检体照射高频磁场的发送部以及接收从所述被检体通过核磁共振而产生的核磁共振信号的接收部;运算部,其使用所述核磁共振信号来进行包含图像重构的运算;导航控制部,其控制所述摄像部,在所述被检体的图像重构用的核磁共振信号的收集之前使导航回波产生,并收集给定的测量时间的导航数据;和导航解析部,其对所述测量时间中的所述导航回波的相位变化进行解析,并算出用于修正与所述相位变化相伴的位置偏离的修正值。其特征在于:导航解析部根据所述导航回波的所述测量时间的各时刻的相位变化与成为基准的导航回波的所述测量时间的各时刻的相位变化的差分来算出与基准的相位变化量,并算出所述修正值。在此,相位变化是指测量时间中的时时刻刻的相位的变化,相位变化量是指与基准的相位变动量。
15.发明的效果
16.根据本发明,能不受mpg脉冲等的影响且不延长dwi的te地高精度算出相位变化量,由此能高精度修正与摄像中产生的中心频率变动相伴的位置偏离。其结果,能在dki、ivim等中得到精度良好的解析结果。
附图说明
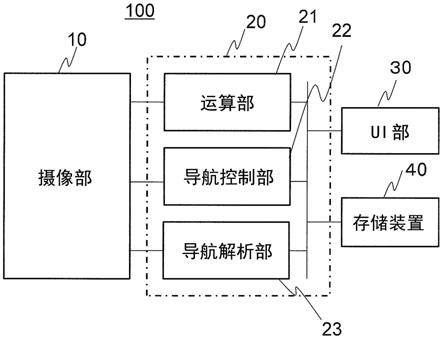
17.图1是表示本发明所涉及的mri装置的整体结构的一例的框图。
18.图2是表示包含摄像部的细节的mri装置的整体结构的框图。
19.图3是图1的mri装置的处理的流程图。
20.图4是表示实施方式1中采用的脉冲序列的一例的图。
21.图5是实施方式1的处理的流程图。
22.图6是说明实施方式1的相位变化量的算出的图,(a)、(b)分别是表示基准导航回
波以及对象导航回波的相位变化的图,(c)是表示相位变化的差分的图,(d)是表示用现有法算出的相位变化的图。
23.图7是变形例1的处理的流程图。
24.图8是说明变形例2中设定的修正值的阈值的图。
25.图9是表示实施方式2中采用的脉冲序列的示例的图。
26.图10是说明实施方式2的相位变化量的算出的图,(a)、(b)分别是表示基准导航回波以及对象导航回波的相位变化的图,(c)是表示相位变化的差分的图。
27.图11是表示实施方式2的变形例中采用的脉冲序列的示例的图。
28.图12是表示实施方式3的ui画面的一例的图。
29.附图标记的说明
30.10:摄像部、
31.20:处理装置、
32.21:运算部、
33.22:导航控制部、
34.23:导航解析部、
35.30:ui部、
36.40:存储装置。
具体实施方式
37.以下参考附图来说明本发明的mri装置的实施方式。另外,在用于说明发明的实施方式的全部图中,对具有相同功能的要素标注相同附图标记,省略其重复的说明。
38.首先说明本发明的mri装置的一个实施方式的概要。图1是表示mri装置的整体结构的框图。如图1所示那样,本实施方式的mri装置100具备摄像部10、运算部21、导航控制部22和导航解析部23。在图示的实施方式中,运算部21、导航控制部22以及导航解析部23包含在实现它们的功能的总括性的处理装置20内。处理装置20可以是具备cpu以及存储器的计算机,除了计算机以外,也可以是包含asic、fpga等硬件的系统,连接有具备显示装置、输入装置的用户接口(ui)部30以及外部存储装置40。在外部存储装置40中,除了包含直接或有线连接的存储装置以外,还包含经由无线、因特网等而连接的存储装置。
39.摄像部10具有与一般的mri装置同样的结构,具备在放置被检体的空间产生静磁场的静磁场产生部、对被检体照射高频磁场的发送部以及接收从被检体通过核磁共振而产生的核磁共振信号的接收部等。在图2示出包含摄像部10的细节的mri装置的整体结构。图2所示的mri装置包含静磁场产生部1、倾斜磁场产生部3、测量控制部4、发送部5、接收部6、信号处理部7和cpu(中央处理装置)2。信号处理部7以及cpu2具有相当于图1的处理装置20的功能。
40.静磁场产生部1配置有永磁铁方式、常导方式或超导方式的静磁场产生源,若是垂直磁场方式,则在绕着被检体50的空间中在与其体轴正交的方向上使均匀的静磁场产生,若是水平磁场方式,则在体轴方向上使均匀的静磁场产生。另外在静磁场产生源的近旁配置用于修正静磁场的不均匀的匀场线圈18。匀场线圈18与匀场电源19连接,通过从匀场电源19提供的电流而驱动,产生修正磁场。能通过该修正磁场修正静磁场的不均匀,并对静磁
场修正随时间的变动。
41.倾斜磁场产生部3包含在作为mri装置的坐标系(静止坐标系)的x、y、z这3轴方向上卷绕的倾斜磁场线圈8和驱动各个倾斜磁场线圈的倾斜磁场电源9,通过按照来自后述的测量控制部4的命令驱动各个线圈的倾斜磁场电源9,来在x、y、z这3轴方向上施加倾斜磁场gx、gy、gz。在摄影时,在与切片面(摄影截面)正交的方向上施加切片方向倾斜磁场脉冲(gs)来设定针对被检体1的切片面,在与该切片面正交且相互正交的剩下的2个方向上施加相位编码方向倾斜磁场脉冲(gp)和频率编码方向倾斜磁场脉冲(gf),并针对回波信号将各个方向的位置信息进行编码。另外,还有将倾斜磁场线圈8作为匀场线圈而利用的情况。
42.测量控制部4是以某给定的脉冲序列来重复施加高频磁场脉冲(以下称作“rf脉冲”)和倾斜磁场脉冲的控制单元,在运算部2的控制下动作,将被检体50的断层图像的数据收集所需的种种命令送往发送部5、倾斜磁场产生部3以及接收部6。关于脉冲序列,根据摄像方法而准备种种脉冲序列,在摄像时,若决定了摄像方法,cpu2就读出对应的脉冲序列,对测量控制部4进行设定。在本实施方式中,执行附加了导航回波的产生和收集的扩散成像的脉冲序列。脉冲序列的细节后述。
43.发送部5为了在构成被检体50的生物体组织的原子的原子核自旋中引起核磁共振而对被检体50照射rf脉冲,包含高频振荡器11、调制器12、高频放大器13和发送侧的高频线圈(发送线圈)14a。通过在基于来自测量控制部4的指令的定时由调制器12对从高频振荡器11输出的高频脉冲进行振幅调制,在将该振幅调制过的高频脉冲用高频放大器13放大后提供给接近被检体50而配置的高频线圈14a,由此对被检体50照射rf脉冲。通过对高频发送器11发送的高频进行调整,能调整核磁共振频率(中心频率)。
44.接收部6检测通过构成被检体50的生物体组织的原子核自旋的核磁共振而放出的回波信号(nmr信号),包含接收侧的高频线圈(接收线圈)14b、信号放大器15、正交相位检波器16和a/d变换器17。在接近被检体50而配置的高频线圈14b检测由从发送侧的高频线圈14a照射的电磁波诱发的被检体50的响应的nmr信号,在用信号放大器15放大后,在基于来自测量控制部4的指令的定时由正交相位检波器16分割成正交的二系统的信号,将它们分别在a/d变换器17变换成数字量,并作为测量数据送往信号处理部7。
45.信号处理部7进行各种数据处理和处理结果的显示以及保存等,其一部分功能通过cpu2实现。在信号处理部7连接光盘、磁盘等外部存储装置40、和具备显示器31、输入装置32的ui部30。若信号处理部7从接收部6被输入测量数据,cpu2就执行信号处理、图像重构等处理,将其结果即被检体50的断层图像显示于显示器31,并记录到外部存储装置40的磁盘等。输入装置32输入mri装置的各种控制信息、信号处理部7中进行的处理的控制信息,包含轨迹球或鼠标、键盘等。该输入装置32接近显示器31而配置,操作者通过一边看着显示器31一边操作输入装置32来交互地控制mri装置的各种处理。
46.cpu2的主要的功能是利用接收部6接收到的nmr信号的运算(运算部21的功能)、和经由测量控制部4的摄像部10的控制,在运算中,除了包含利用nmr信号的图像重构、根据重构图像的计算图像的生成等运算以外,还包含利用nmr信号(导航回波)的相位的解析(导航解析部23的功能)。另外在摄像部10的控制中包含与导航回波的产生、收集相关的控制(导航控制部22的功能)。
47.参考图3来说明以上那样的结构的mri装置的动作的概略。
48.若设定了摄像参数,则在测量控制部4的控制下,摄像部10以设定的条件开始摄像(s31)。摄像参数可以和脉冲序列一起预先默认设定,也可以经由ui部30由用户指定。除了设定作为一般的摄像参数的te、tr以外,在dwi中还设定mpg的强度、施加轴等。
49.dwi的脉冲序列400如图4所示那样,是如下那样的epi法的脉冲序列:在激发脉冲402的前后施加强度大的mpg脉冲403、404之后,重复读出倾斜磁场脉冲gf的反转405和尖头状的相位编码倾斜磁场gp的施加406,在1次的激发后测量多个回波信号407。在本实施方式中,通过导航控制部22在最初的mpg脉冲403之前使导航回波411产生,并进行收集。另外,在图4中,示出作为导航回波而测量fid信号的情况,但导航回波中有几种方式。这些方式在后述的实施方式中进行说明。
50.导航回波每隔脉冲序列的重复时间tr而重复产生/收集,得到多个导航回波。这当中,将在摄像之前取得的导航回波设为基准导航回波。
51.接收部6在给定的采样时间收集到的导航回波的测量数据被交给cpu2的导航解析部23,在这里算出采样时间中的相位变化。导航解析部23例如通过拟合采样时间的各时刻的相位来算出其间的相位变化。导航解析部23进一步将算出的相位变化与也针对基准导航回波同样算出的相位变化进行差分运算,来算出与基准的相位变化量(s32)。
52.接下来,导航解析部23使用相位变化量来算出用于修正与相位变化相伴的位置偏离的修正值(s33)。与相位变化相伴的位置偏离的修正包含匀场线圈18的电流值的修正(静磁场的修正)、中心频率的修正(高频发送器11的调整)以及图像的修正(运算部21所进行的修正),导航解析部23算出与进行修正的对象相应的修正值。最后进行基于修正值的各部的修正(s34)。在修正能通过其对象实时进行的情况下,立即反映在导航回波收集后的dwi测量来进行修正。在不能立即反映的情况下,也在1~多tr后进行反映了修正值的修正。在图像的修正的情况下,对在导航回波后执行的epi中取得的回波信号的图像进行利用了根据在该重复时间收集的导航回波算出的修正值的修正。
53.根据本实施方式的mri装置,由于不是利用导航回波的te中的相位差,而是通过拟合测量时间内的各时刻的相位的变化来算出相位变化量,因此能不受偏移的影响而精度良好地算出修正值。另外,由于不需要为了精度良好地求取相位变化量而拉长用于导航回波测量的te,因此关于需要施加大量轴的mpg来重复测量的dwi,也能防止测量时间的延长,且能有效地防止其间的中心频率变动所引起的位置偏离。
54.接下来说明与导航回波的产生的收集相关的具体的实施方式。
55.<实施方式1>
56.本实施方式的特征在于,作为导航回波而测量图4所示那样的不施加读出倾斜磁场的信号。
57.参考图5来说明本实施方式的处理的流程。
58.若开始摄像,导航解析部23设定频率修正的初始值(s51)。初始值是用于算出之后的修正值的初始值,可以是预测在事前的摄像中取得的频率变化的值,也可以不设定值。
59.首先取得成为基准的导航回波(基准导航回波)(s52)。即,在将激发脉冲411和区域选择倾斜磁场gs一起施加后,不施加读出倾斜磁场地收集给定的采样时间412的期间的导航回波413。采样时间414设为能充分算出其间的相位变化的相应量的时间。接下来取得正式摄像的序列的回波信号(正式摄像回波)(s53)。所谓正式摄像,是针对用户要取得的图
像的序列,在本实施方式中,是图4所示那样的dwi的序列400。接下来,导航控制部22重复导航回波的测量和正式摄像回波的测量(s54~s59),在其间,导航解析部23进行修正值的计算(s55~s58)。该重复中的导航回波的测量以及正式摄像回波的测量与上述的步骤s52以及s53同样地进行。步骤s54~s59例如设为摄像的重复时间tr。
60.修正值的计算中,根据步骤s52中取得的基准导航回波与s54中取得的导航回波(对象导航回波)的差分来算出相位变化(s55)。接下来拟合进行差分运算的相位变化(s56)。拟合可以是式(1)那样的一次函数,也可以是考虑了涡电流的影响的式(2)那样的式子。
61.[数学式1]dp=a1
×
t b
ꢀꢀ
(1)
[0062]
[数学式2]dp=a1*t a2*exp(
‑
a3/t)
ꢀꢀ
(2)
[0063]
在这些式中,dp表征相位变化,a、a1、a2、a3表征系数,b表征偏移。
[0064]
在图6的(a)~(c)示出拟合的样子。图6的(a)、(b)表示基准导航回波以及对象导航回波的相位变化,(c)是其差分,表示对差分进行拟合的样子。另外,作为参考,在图6的(d)示出基于现有法的相位变化的算出例。如图6的(d)所示那样,在现有法中,由于根据从用于使导航回波产生的rf照射起的te中的相位变化来算出相位变化量,因此在有偏移的情况下其会成为误差,但在本实施方式的手法中,由于拟合差分后的相位变化,因此能不受偏移的影响而精度良好地算出相位变化。
[0065]
接下来使用与基准的相位变化量来算出修正值(s57)。修正值可以是流过匀场线圈18的修正电流的值,也可以是激发脉冲401照射时的中心频率的修正值。频率的修正值能根据相位(ωt)与频率(f)的关系式(ω=2πf)算出。另外,由于流过匀场线圈18的电流值与由此产生的磁场强度的关系通过匀场线圈的特性决定,因此,能从根据磁共振频率(f0)与静磁场强度(b0)的关系式(f0=γb0)算出的静磁场的变动量来算出匀场线圈的修正电流。由于静磁场(中心频率)和实空间位置有线性的关系,因此能根据静磁场变动量修正实空间的位置偏离即图像上的位置偏离。
[0066]
将算出的修正值反映到步骤s54的导航回波的取得后的正式摄像(s58)。即,可以使用s57中算出的修正值在匀场线圈18流过修正电流,也可以修正下一次照射时的中心频率。另外,在开始在匀场线圈流过修正电流要花费时间的情况下,由于有时正式摄像回波的位置偏离已经开始,因此可以对步骤s58中取得的正式摄像回波使用步骤s57中算出的修正值在图像重构时进行修正。在步骤s59,还在取得正式摄像回波的情况下回到步骤s54。将步骤s54~s59的动作重复1次以上,从而成为摄像结束。
[0067]
另外,将步骤s53与s59的时间间隔设为tr,但在使用心电、脉搏、呼吸等的同步而正式摄像的间隔发生变化的情况下,则并不限于此。另外在图5中,在基准导航回波取得(s52)后取得第1次的正式摄像回波,但也可以在基准导航回波取得之前进行正式摄像回波取得(s53),还可以在步骤s57计算修正值后进行。
[0068]
根据本实施方式,由于拟合与基准导航回波的相位差分来算出相位的变化量,因此能不受偏移的影响地算出相位变化量,能进行精度良好的位置偏离修正。
[0069]
<变形例1>
[0070]
在实施方式1中,在正式摄像之前实施1次基准导航回波的测量,之后的重复中的相位变化的计算使用该基准导航回波进行,但在正式摄像的重复多而摄像时间长的摄像
中,在正式摄像的重复之间取得多次基准导航回波,相位变化的计算可以使用最近取得的基准导航回波。
[0071]
在图7示出本变形例的处理的流程。在图7中,与图5相同的步骤以相同附图标记示出,省略重复的说明。在本实施方式中,重复取得基准导航回波的步骤s520到s521。即,在取得基准导航回波后(s520),测量正式摄像回波(s53),与实施方式1同样地进行包含对象导航回波的测量(s54)到正式摄像回波测量(s58)的重复摄像(s59)。在多次重复后进一步进行摄像的情况下(s521),返回步骤s520,重复s520到s521。若预定的摄像完结,则成为结束。
[0072]
基准导航回波的取得的定时可以是步骤s54~s58的重复次数成为给定的次数时,也可以设为tr内的脉冲序列形状大幅改变的情况。作为脉冲序列的形状大幅改变的情况,例如有tr内的切片片数改变时,读出倾斜磁场的定时改变时,更换相位编码、频率编码的物理轴时等。另外,也可以是由体动等引起的急剧的相位变动时。例如在步骤s56中算出的相位变化量比给定的值(例如在这以前算出的相位变化量、其平均值)大时,也可以重新取得基准导航回波。
[0073]
根据本变形例,能避免脉冲序列的变化、预期外的相位变动等的影响,能稳定地进行修正。
[0074]
另外在图5以及图7中示出针对每个正式摄像回波的测量而进行对象导航回波的测量的情况,但例如也可以每当多次进行图4所示的dwi序列时则取得1次的对象导航。
[0075]
<变形例2>
[0076]
在本变形例中,处理的流程也与图5或图7所示的流程相同。在本变形例中,特征在于,包含:在步骤s57中算出的修正值是不适合的修正值时将其排除的处理。
[0077]
因此,在导航解析部23,对修正值或相位变动量设定阈值。阈值可以从根据预先测量的相位变动求得的预测值的统计值设定上限、下限,也可以基于摄像中多次算出的修正值的平均值而每次都进行设定。导航解析部23进行限制,使得在图5、图7的步骤s57中设定修正值时,不会超出设定的阈值地修正变动量。例如在图8所示的示例中,分别对修正值设定上限的阈值803、下限的阈值804。若收在阈值内,则关于修正值801,进行利用其的频率、静磁场的修正,但关于阈值外的修正值802,判定为是基于不适合的相位变动的修正值,不进行修正。
[0078]
根据本变形例,通过对修正值或相位变动量设置阈值,即使是由于噪声等主要原因而急剧引起相位变动时,也不会进行过度的修正、逆修正,能稳定地进行修正。
[0079]
<实施方式2>
[0080]
在实施方式1中,不施加读出倾斜磁场地取得导航回波,但本实施方式中施加读出倾斜磁场来取得多个导航回波。处理的流程与实施方式1(图5)或其变形例(图7)同样,援引图5,以不同点为中心来进行说明。
[0081]
在本实施方式中,在s52以及s54的取得导航回波的步骤中,如图9所示那样,施加在激发脉冲411施加后反转的读出倾斜磁场415,在不同的te收集多个(图中是4个)导航回波416。正式摄像序列400与图4同样。接下来,在步骤s55,算出基准导航回波以及对象导航回波的分别不同的te导航回波当中的对应的te彼此的相位差分,对相位差分进行拟合。拟合也可以与实施方式1同样地是利用一次函数(式(1))的拟合,还可以利用考虑了涡电流的拟合函数(式(2))。
[0082]
在图10示出相位差分的拟合的样子。图10的(a)、(b)分别是表示基准导航回波的相位变化、对象导航回波的相位变化的图,(c)是进行差分运算的相位变化。如图10的(c)所示那样,在该示例中,在相位中出现偏移,在拟合的直线中,虽然有相当于偏移的切片(式(1)的d),但由于相位变化量能根据直线的倾斜度求得,因此能不受偏移的影响地算出正确的相位变化量。
[0083]
如下操作与实施方式1同样:根据这样算出的相位变化量来算出修正值(s57);使用修正值来修正匀场电流,或修正正式摄像中的照射的频率,或在正式摄像的图像重构时进行位置偏离修正(s58)。其中,在本实施方式中,由于在取得导航回波时施加读出倾斜磁场,因此在导航回波中残留有所施加的轴的信息。因此,可以使用该信息进行现有的基于体动的修正,也可以修正从该读出倾斜磁场的施加轴取得的物理轴方向的静磁场变动。
[0084]
<实施方式2的变形例>
[0085]
另外,在实施方式2中,对1个轴施加读出倾斜磁场,但也可以如图11所示那样,使施加读出倾斜磁场417~419的轴不同,从而取得导航回波416。在本实施方式中,算出基准导航回波以及对象导航回波的各自读出倾斜磁场的施加轴不同的导航回波当中的在相同施加轴收集的导航回波的相位差分,对相位差分进行拟合。如下操作与实施方式2同样:使用相位差分来算出修正值;将其反映到正式摄像中。
[0086]
在本实施方式中,由于能从导航回波取得各轴的信息,因此可以使用各轴的信息进行现有的基于体动的修正,也可以修正各物理轴的静磁场变动。
[0087]
另外,在图11中,对各轴取得1个导航回波,但也可以取得2以上导航回波,在该情况下,可以算出每个施加轴的相位差分,算出每个轴的修正值。
[0088]
以上说明了导航回波的测量、其处理的实施方式和其变形例,但这些实施方式、变形例可以将其任一者预先装入装置,还能由用户在dwi摄像时进行选择,或设定条件。在接下来的实施方式中,说明用于使得能进行用户选择的ui的实施方式。
[0089]
<实施方式3>
[0090]
本实施方式的mri装置能经由ui部30设定由用户进行的修正的需要与否、条件。参考图12来说明本实施方式的处理。图12是显示于ui部30的显示器31的画面例。
[0091]
在该画面例中,ui画面1200设有:选择是否进行频率修正的按钮1201;选择导航回波的种类的按钮1202;指定取得导航回波的时间的框1203;选择修正方法的按钮1204;选择是否进行体动修正的1205;设定修正时的阈值的框1206。
[0092]
在选择按钮1202中,接受使用上述的实施方式或变形例当中的哪个种类的导航回波的选择。导航控制部22按照该选择来决定在正式摄像序列400前执行的导航序列,并对测量控制部4设定。关于框1203,在不使用读出倾斜磁场的导航回波的情况下(实施方式1等),成为其采样时间(ad时间)(图4的414),在施加读出倾斜磁场的情况下,成为取得各导航回波的总计时间。进而,也可以设置附属于该框1203的下拉式菜单,从而能设定施加轴、导航回波数。
[0093]
修正方法的选择按钮1204接受修正方法的做法的选择。即,接受是以匀场线圈进行修正、在照射时设定修正过的频率来进行修正、还是在取得正式摄像回波后对图像进行修正等的选择。体动修正的框1205是在引起急剧的变化时选择是进行导航回波的体动修正、或重新取得基准导航回波、或者是否进行这两方的ui。阈值的设定框1206是设定用于除
去修正值的不当的阈值的框,在设定了阈值的情况下,如实施方式1的变形例2说明的那样,不将从由设定的上限阈值和下限阈值决定的范围偏离的修正值作为修正值采用。
[0094]
如此地,根据本实施方式,用户能对应于条件来改变修正精度,能取得用户期待的画质。
[0095]
另外,图12是ui画面的一例,还能省去这里举出的条件的一部分,或追加与其不同的条件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。