1.本发明涉及椅子式按摩机。
背景技术:
2.一般的椅子式按摩机对被施疗者进行揉压施疗及敲击施疗。另外,开发了一种对被施疗者不仅进行揉压施疗及敲击施疗,还进行拉伸施疗的椅子式按摩机(例如参照专利文献1)。
3.在专利文献1所公开的椅子式按摩机中,使座部和靠背部反向倾动而使得被施疗者的身体成为拉伸的状态,与此相配合地,使按摩球突出以按压被施疗者的腰部,由此对被施疗者进行拉伸施疗。
4.然而,在专利文献1所公开的椅子式按摩机中,即使使座部和靠背部反向倾动,但由于被施疗者的臀部向下方下沉,因此也没有执行有效的拉伸施疗。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2016
‑
165563号公报
技术实现要素:
8.发明要解决的课题
9.本发明鉴于上述情况,其目的在于提供一种能够进行有效的拉伸施疗的椅子式按摩机。
10.用于解决课题的方案
11.在本说明书中公开的椅子式按摩机是如下结构(第一结构):所述椅子式按摩机具备:座部,其对被施疗者的臀部及大腿部进行支承;靠背部,其对所述被施疗者的肩、腰及后背进行支承,且能够倾斜;以及第一移动部,其使所述座部的后端向上方移动。
12.在上述第一结构的椅子式按摩机的基础上,也可以是如下结构(第二结构):在所述靠背部倒下至最后方的状态下,所述第一移动部使所述座部的后端向上方移动。
13.在上述第二结构的椅子式按摩机的基础上,也可以是如下结构(第三结构):所述椅子式按摩机具备:脚踏部,其收容所述被施疗者的小腿;以及第二移动部,其使所述脚踏部移动,在所述靠背部倒下至最后方的状态下,所述第二移动部使所述脚踏部移动,以使得所述被施疗者的小腿随着从所述被施疗者的膝盖朝向脚踝而下降。
14.在上述第二结构的椅子式按摩机的基础上,也可以是如下结构(第四结构):所述椅子式按摩机具备:脚踏部,其收容所述被施疗者的小腿;以及第二移动部,其使所述脚踏部移动,在所述靠背部倒下至最后方的状态下,所述第二移动部使所述脚踏部移动,以使得所述被施疗者的小腿沿着水平方向。
15.在上述第一至第四中任一结构的椅子式按摩机的基础上,也可以是如下结构(第五结构):在对所述被施疗者进行的施疗结束后,所述第一移动部使所述座部的后端向上方
移动。
16.在上述第一至第五中任一结构的椅子式按摩机的基础上,也可以是如下结构(第六结构):所述靠背部的转动支点在前后方向上的位置与胯点在前后方向上的位置一致。
17.发明效果
18.根据本说明书中所公开的椅子式按摩机,能够进行有效的拉伸施疗。
附图说明
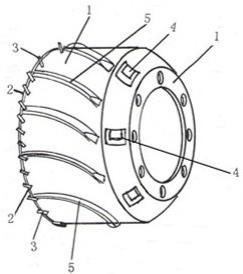
19.图1是一实施例的椅子式按摩机的概要立体图。
20.图2是示出对一实施例的椅子式按摩机的动作进行控制的控制系统的框图。
21.图3是示意性地示出一实施例的椅子式按摩机的框架等的侧视图。
22.图4是示意性地示出一实施例的椅子式按摩机的框架等的侧视图。
23.图5是示意性地示出一实施例的椅子式按摩机的框架等的侧视图。
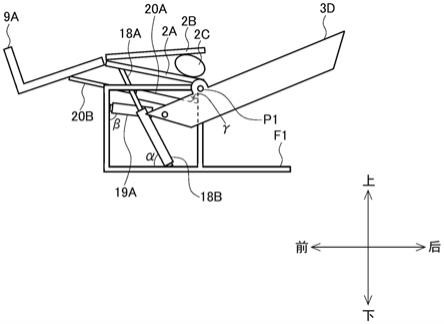
24.图6是示意性地示出一实施例的椅子式按摩机的框架等的侧视图。
25.图7是示意性地示出一实施例的椅子式按摩机的框架等的侧视图。
26.图8是示意性地示出一实施例的椅子式按摩机的框架等的侧视图。
27.附图标记说明:
[0028]1ꢀꢀ
一实施例的椅子式按摩机
[0029]2ꢀꢀ
座部
[0030]
2a、2b
ꢀꢀ
框架
[0031]
2c
ꢀꢀ
气囊
[0032]3ꢀꢀ
靠背部
[0033]9ꢀꢀ
脚踏部
[0034]
18
ꢀꢀ
座部用致动器
[0035]
19
ꢀꢀ
靠背部用致动器
[0036]
20
ꢀꢀ
脚踏部用致动器
[0037]
f1
ꢀꢀ
基台框架。
具体实施方式
[0038]
以下,参照附图对本发明的例示性的实施方式进行详细说明。
[0039]
图1是一实施例的椅子式按摩机1(以下,称作“按摩机1”)的前方立体图。在以下的说明中,将从在未将靠背部3放倒的状态的按摩机1就座的被施疗者观察时的前侧(正面侧)称作“前侧”或“前方”,将从在未将靠背部3放倒的状态的按摩机1就座的被施疗者观察时的后侧(背面侧)称作“后侧”或“后方”。另外,将从在未将靠背部3放倒的状态的按摩机1就座的被施疗者观察时的上侧(头侧)称作“上侧”或“上方”,将从在未将靠背部3放倒的状态的按摩机1就座的被施疗者观察时的下侧(脚侧)称作“下侧”或“下方”。另外,将从在按摩机1就座的被施疗者观察时的右侧称作“右侧”或“右方”,将在就座于按摩机就座的被施疗者观察时的左侧称作“左方”。
[0040]
按摩机1具备座部2、靠背部3、侧壁部4、臂施疗部5、操作部6、电源线7、支架8、以及脚踏部9。
[0041]
座部2对被施疗者的臀部及大腿部进行支承。
[0042]
靠背部3对被施疗者的肩、腰及后背进行支承。靠背部3能够倾斜。也就是说,靠背部3能够绕着沿左右方向延伸的倾斜旋转轴转动。该倾斜旋转轴是靠背部3的转动支点p1(参照图3~图8)。
[0043]
靠背部3的转动支点p1在前后方向上的位置与胯点在前后方向上的位置一致。由此,能够防止在放倒靠背部3时被施疗者的头沿靠背部3的长度方向偏移。需要说明的是,胯点是指被施疗者的臀部的中心(设计值)。
[0044]
靠背部3内置有按摩单元(未图示)和导轨3b及3c,导轨3b及3c沿着与被施疗者的肩及腰相接的面3a延伸。该按摩单元由导轨3b及3c引导而在靠背部3内升降。
[0045]
侧壁部4在座部2的左右两侧立起设置。
[0046]
臂施疗部5设置于座部2的左右两侧,且由侧壁部4支承。臂施疗部5内置有能够膨缩的气囊,通过该气囊对被施疗者的臂一边进行支承一边进行施疗。
[0047]
操作部6是用于供被施疗者进行施疗模式的选择、施疗的强弱调节等的输入装置。操作部6经由电源线7而与设置于座部2的下方的控制部(在图1中未图示)连接。该控制部基于从操作部6输出的信号来控制按摩机1的各部分。
[0048]
支架8固定于在座部2的左侧设置的臂施疗部5。操作部6能够相对于支架8进行装卸。
[0049]
脚踏部9收容被施疗者的小腿。
[0050]
图2是示出对按摩机1的动作进行控制的控制系统的框图。
[0051]
按摩机1具备控制部10、存储部11、驱动电路12~17、座部用致动器18、靠背部用致动器19、脚踏部用致动器20、按摩单元用致动器21、空气泵22以及电磁阀组23。脚踏部用致动器20是使脚踏部9移动的第二移动部的一例。即,按摩机1具备使脚踏部9移动的第二移动部。
[0052]
存储部11存储有控制部10为了控制按摩机1的动作所需的程序及数据等。
[0053]
控制部10基于从操作部6输出的信号来控制按摩机1的动作。具体而言,控制部10进行如下控制。
[0054]
控制部10经由驱动电路12来控制座部用致动器18。控制部10经由驱动电路13来控制靠背部用致动器19。控制部10经由驱动电路14来控制脚踏部用致动器20。控制部10经由驱动电路15来控制按摩单元用致动器21。需要说明的是,驱动电路15及按摩单元用致动器21是按摩单元的一部分,且设置于按摩单元内。
[0055]
控制部10经由驱动电路16来控制空气泵22。控制部10经由驱动电路17来控制电磁阀组23。电磁阀组23包括多个电磁阀。各电磁阀配置在空气泵22与至少一个气囊之间。电磁阀例如是分流型的三通阀。空气泵22通过配管而与电磁阀的输入侧的阀连结。电磁阀的输出侧的一方的阀通过配管而与至少一个气囊连结。电磁阀的输出侧的另一方的阀是能够向大气开放的阀。
[0056]
上述的空气泵22及电磁阀是进行向气囊的空气供给以及从气囊的空气排出的给排气部的一例,且也可以将空气供给及空气排出停止。
[0057]
图3~图8是示意性地示出按摩机1的框架等的侧视图。
[0058]
座部用致动器18具有杆构件18a、将杆构件18a的后部收容的筒状构件18b、以及座
部用马达(未图示)。杆构件18a的前端以能够在垂直于左右方向的平面上旋转的方式连接于在座部2之下设置的框架2a的前端附近且下端。在此,框架2a的前端附近是指与框架2a的前端之间的距离比与框架2a的后端之间的距离短的位置。框架2a的后端以能够在垂直于左右方向的平面上旋转的方式连接于基台框架f1的上端且后端。需要说明的是,在座部2与框架2a之间设有框架2b。框架2b的前端以能够在垂直于左右方向的平面上旋转的方式连接于框架2a的前端。筒状构件18b的后端以能够在垂直于左右方向的平面上旋转的方式连接于对座部2及靠背部3进行支承的基台框架f1的下端。
[0059]
座部用致动器18通过座部用马达的旋转,能够变更杆构件18a从筒状构件18b的突出量。当杆构件18a从筒状构件18b的突出量增加时,从按摩机1的左侧观察,座部2的前端顺时针旋转。相反地,当杆构件18a从筒状构件18b的突出量减少时,从按摩机1的左侧观察,座部2的前端逆时针旋转。杆构件18a从筒状构件18b的突出量越大,则从按摩机1的左侧观察,筒状构件18b的长度方向与前后方向所成的锐角α越大。
[0060]
靠背部用致动器19具有杆构件19a、收容杆构件19a的前部的筒状构件19b、以及靠背部用马达(未图示)。杆构件19a的后端以能够在垂直于左右方向的平面上旋转的方式与连接于在靠背部3设置的框架3a的下端。筒状构件19b的前端以能够在垂直于左右方向的平面上旋转的方式连接于基台框架f1的前端。
[0061]
靠背部用致动器19能够通过靠背部用马达的旋转来变更杆构件19a从筒状构件19b的突出量。当杆构件19a从筒状构件19b的突出量增加时,从按摩机1的左侧观察,靠背部3逆时针旋转。相反地,当杆构件19a从筒状构件19b的突出量减少时,从按摩机1的左侧观察,靠背部3顺时针旋转。杆构件19a从筒状构件19b的突出量越大,则从按摩机1的左侧观察,筒状构件19b的长度方向与上下方向所成的锐角β越小。
[0062]
脚踏部用致动器20具有杆构件20a、将杆构件20a的后部收容的筒状构件20b、以及脚踏部用马达(未图示)。杆构件20a的前端与在脚踏部9设置的框架9a的背面相接。需要说明的是,当在使脚踏部用致动器20停止了的状态下,从按摩机1的左侧观察,脚踏部9顺时针旋转时,脚踏部框架9a的背面远离杆构件20a的前端。筒状构件20b的后端以能够在垂直于左右方向的平面上旋转的方式连接于对座部2及靠背部3进行支承的基台框架f1。
[0063]
脚踏部用致动器20能够通过脚踏部用马达的旋转来变更杆构件20a从筒状构件20b的突出量。当杆构件20a从筒状构件20b的突出量增加时,从按摩机1的左侧观察,脚踏部9顺时针旋转。相反地,当杆构件20a从筒状构件20b的突出量减少时,从按摩机1的左侧观察,脚踏部9逆时针旋转。杆构件20a从筒状构件20b的突出量越大,则从按摩机1的左侧观察,筒状构件20b的长度方向与上下方向所成的锐角γ越小。
[0064]
图3示出了按摩机1的初始状态。在图3所示的状态下,座部2的前端位于最下方,靠背部3最大程度立起,脚踏部9最大程度接近基台框架f1的前端。在图3所示的状态下,在杆构件18a的可动范围内杆构件18a从筒状构件18b的突出量为最小,在杆构件19a的可动范围内杆构件19a从筒状构件19b的突出量为最大,在杆构件20a的可动范围内杆构件20a从筒状构件20b的突出量为最小。
[0065]
图4示出了按摩机1的电源刚接通后的状态。需要说明的是,电源接通可以通过操作部6的操作而手动执行,但也可以预先使检测被施疗者的就座的传感器始终动作,并以被施疗者的就座作为触发而自动执行。在图4所示的状态下,座部2的前端位于比图3所示的状
态靠上的位置,靠背部3最大程度立起,脚踏部9比图3所示的状态远离基台框架f1的前端。在图4所示的状态下,在杆构件18a的可动范围内杆构件18a从筒状构件18b的突出量为中间值,在杆构件19a的可动范围内杆构件19a从筒状构件19b的突出量为最大,在杆构件20a的可动范围内杆构件20a从筒状构件20b的突出量为第一中间值。
[0066]
图5~图7示出按摩机1的靠背部3倒下至最后方的状态(完全倾斜状态)。
[0067]
在图5及图6所示的状态下,座部2的前端位于比图3所示的状态靠上的位置,靠背部3倒下至最后方,脚踏部9远离基台框架f1的前端。在图5及图6所示的状态下,在杆构件18a的可动范围内杆构件18a从筒状构件18b的突出量为中间值,在杆构件19a的可动范围内杆构件19a从筒状构件19b的突出量为最小,在杆构件20a的可动范围内杆构件20a从筒状构件20b的突出量为第二中间值(>第一中间值)。
[0068]
在图6所示的状态下,在框架2a的后端与框架2b的后端之间设置的气囊2c膨胀。由此,在图6所示的状态下,与图3~图5所示的状态相比,座部2的后端向上方移动。也就是说,气囊2c作为使座部2的后端向上方移动的移动部发挥功能。因此,按摩机1具备使座部2的后端向上方移动的第一移动部。另外,在靠背部3倒下至最后方的状态下,上述第一移动部使座部2的后端向上方移动。
[0069]
在图6所示的状态下,座部2的后端向上方移动,由此能够抑制被施疗者的臀部向下方下沉,因此能够有效地对被施疗者的腰部进行拉伸施疗。
[0070]
而且,在图6所示的状态下,脚踏部9所收容的被施疗者的小腿随着从膝盖朝向脚踝而下降。也就是,在图6所示的状态下,在靠背部3倒下至最后方的状态下,上述第二移动部使脚踏部9移动,以使得被施疗者的小腿随着从被施疗者的膝盖朝向脚踝而下降。由此,与被施疗者的小腿沿着水平方向的状态相比,能够强化对被施疗者的腰部进行的拉伸施疗。
[0071]
在图7所示的状态下,座部2的前端位于比图3所示的状态靠上的位置,靠背部3倒下至最后方,脚踏部9最大程度远离基台框架f1的前端。在图7所示的状态下,在杆构件18a的可动范围内杆构件18a从筒状构件18b的突出量为中间值,在杆构件19a的可动范围内杆构件19a从筒状构件19b的突出量为最小,在杆构件20a的可动范围内杆构件20a从筒状构件20b的突出量为最大。
[0072]
在图7所示的状态下,气囊2c以比图6所示的状态收缩的状态膨胀。由此,在图7所示的状态下,与图3~图5所示的状态相比,座部2的后端向上方移动。
[0073]
在图7所示的状态下,座部2的后端向上方移动,由此能够抑制被施疗者的臀部向下方下沉。另外,在图7所示的状态下,座部2的后端不会向上方移动与图6所示的状态相当的程度,因此能够抑制对被施疗者的腰部进行的拉伸施疗。而且,在图7所示的状态下,脚踏部9所收容的被施疗者的小腿沿着水平方向。也就是,在图7所示的状态下,在靠背部3倒下至最后方的状态下,上述第二移动部使脚踏部9移动,以使得被施疗者的小腿沿着水平方向。
[0074]
在图7所示的状态下,脚踏部9的与被施疗者的腿肚相接的面、座部2的上表面、以及靠背部3的面3a(参照图1)成为接近一条直线的配置,按摩机1对被施疗者而言成为接近床的形状。由于图7所示的状态能够使被施疗者放松,因此优选例如在对被施疗者进行的施疗结束后一定时间,按摩机1维持图7所示的状态。
[0075]
图8示出了按摩机1的对被施疗者进行的施疗结束后的状态。在本实施方式中,在对被施疗者进行的施疗结束后,经过图7所示的状态而过渡到图8所示的状态。
[0076]
在图8所示的状态下,座部2的前端位于最下方的位置,靠背部3最大程度立起,脚踏部9最大程度接近基台框架f1的前端。在图8所示的状态下,在杆构件18a的可动范围内杆构件18a从筒状构件18b的突出量为最小,在杆构件19a的可动范围内杆构件19a从筒状构件19b的突出量为最大,在杆构件20a的可动范围内杆构件20a从筒状构件20b的突出量为最小。
[0077]
在图8所示的状态下,气囊2c膨胀。由此,在图8所示的状态下,与图3~图5所示的状态相比,座部2的后端向上方移动。也就是说,在对被施疗者进行的施疗结束后,上述第一移动部使座部2的后端向上方移动。
[0078]
在图8所示的状态下,座部2的后端向上方移动,由此被施疗者容易从就座的状态站起。
[0079]
需要说明的是,在图8所示的状态下,气囊2c优选以比图7所示的状态收缩的状态膨胀。这是因为若气囊2c过度膨胀,则被施疗者容易从就座的状态站起的效果变小。
[0080]
应当认为上述实施方式在所有方面仅为例示,而并非限制性的内容,应当理解的是,本发明的技术范围不是由上述实施方式的说明示出,而是由技术方案的范围示出,且包含与技术方案的范围等同的含义以及技术方案的范围内所属的所有变更。
[0081]
例如,在本实施方式中,使座部2的后端向上方移动的移动部是气囊2c,但也可以是,与本实施方式不同,而将气囊2c以外的部件例如以下所述的致动器等用作使座部2的后端向上方移动的移动部,该致动器具有具有杆构件、收容杆构件的筒状构件、以及用于调整杆构件相对于筒状构件的突出量的马达。
[0082]
例如,在本实施方式中,作为座部用致动器18、靠背部用致动器19、以及脚踏部用致动器20,分别使用了具有杆构件、收容杆构件的筒状构件、以及用于调整杆构件相对于筒状构件的突出量的马达的致动器,但也可以与本实施方式不同,也可以将座部用致动器18、靠背部用致动器19、以及脚踏部用致动器20中的至少一个设为具有杆构件、收容杆构件的筒状构件、以及用于调整杆构件相对于筒状构件的突出量的马达的致动器以外的致动器。例如,可以通过使用具有连杆机构的致动器来减小致动器的占有空间。
[0083]
在上述实施方式中,按摩机1是具有使座部2的后端向上方移动的移动部的结构,但也可以设为如下结构:在不具有使座部2的后端向上方移动的移动部的结构的按摩机中,靠背部3的转动支点p1在前后方向上的位置与胯点在前后方向上的位置一致的结构。在该情况下,也可以得到这样的效果:能够防止在将靠背部3放倒时,被施疗者的头沿着靠背部3的长度方向偏移。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。