1.本技术涉及农业技术领域,尤其涉及一种基于树莓派的植物环境监测与自动种植系统。
背景技术:
[0002]“智慧农业”利用实时、动态的农业物联网采集信息,实现快速、多维、多尺度的植物种植信息实时检测,并在实时检测到的信息基础上实现农田的智能灌溉、智能施肥与智能喷药等自动控制,突破植物种植信息获取困难与智能化程度低等技术发展的瓶颈。
[0003]
目前检测到的农作物信息一般都是通过物联网或者上传云服务器来处理,部分偏远地区不方便部署广域网网络或者网络部署成本高。
技术实现要素:
[0004]
本技术实施例提供一种基于树莓派的植物环境监测与自动种植系统,使用无线局域网连接,摆脱广域网的束缚,降低网络部署成本,实现降本管理。
[0005]
本技术实施例提供一种基于树莓派的植物环境监测与自动种植系统,所述系统包括:
[0006]
无线采集设备集群,用于采集植物生长的图像和环境信息,并发送给树莓派主控系统;
[0007]
所述树莓派主控系统,用于根据所述图像和环境信息,基于机器学习模型的决策结果,生成对应的控制指令;
[0008]
种植设备组,用于根据所述树莓派主控系统下发的控制指令执行相应的操作;
[0009]
其中,所述种植设备组包括下述至少一项:水肥机、控制光线的遮光控制电机、控制空气流通的卷膜控制电机与通风机、负责浇水灌溉的喷淋系统。
[0010]
可选的,所述植物环境监测与自动种植系统用于对多个种植区域的植物进行监测;
[0011]
其中,各个种植区域均设置有所述无线采集设备集群和所述种植设备组。
[0012]
可选的,所述树莓派主控系统包括设置在不同种植区域的多个树莓派;
[0013]
其中,所述树莓派用于根据对应种植区域内设置的无线采集设备集群采集到的图像和环境信息,生成用于控制对应种植区域内的种植设备组的控制指令。
[0014]
可选的,所述树莓派主控系统包括下述至少一项:用于连接互联网的网络接口、wifi模块、数据存储单元、触摸屏、用于外接显示器的hdmi接口。
[0015]
可选的,所述无线采集设备集群包括用于采集环境信息的检测传感器和用于采集图像的摄像头。
[0016]
可选的,所述检测传感器包括用于采集土壤温湿度、ph、空气温湿度、二氧化碳浓度和光照信息的多合一传感器。
[0017]
可选的,所述检测传感器、所述摄像头和所述种植设备组均设置有无线通信模块。
[0018]
可选的,所述植物环境监测与自动种植系统还包括用户设备;
[0019]
所述树莓派主控系统还用于接收用户设备通过蓝牙发送的控制指令,并根据接收到的控制指令控制种植设备组。
[0020]
可选的,所述植物环境监测与自动种植系统还包括云端设备;
[0021]
所述树莓派主控系统还用于接收云端设备发送的控制指令,并根据接收到的控制指令控制种植设备组;
[0022]
其中,所述云端设备发送的控制指令为所述云端设备从用户设备获取到的控制指令。
[0023]
可选的,所述多个树莓派包括主树莓派以及至少一个从树莓派;
[0024]
所述主树莓派与所述用户设备和云端设备通信连接以接收所述用户设备或云端设备发送的控制指令;
[0025]
所述主树莓派还用于确定所述用户设备或云端设备发送的控制指令对应的种植区域,并将接收到的控制指令发送给对应的从树莓派。
[0026]
本技术实施例提供的一种基于树莓派的植物环境监测与自动种植系统,包括无线采集设备集群,用于采集植物生长的图像和环境信息,并发送给树莓派主控系统,所述树莓派主控系统,用于根据所述图像和环境信息,生成对应的控制指令,种植设备组,用于根据所述树莓派主控系统下发的控制指令执行相应的操作,其中,所述种植设备组包括下述至少一项:水肥机、控制光线的遮光控制电机、控制空气流通的卷膜控制电机与通风机、负责浇水灌溉的喷淋系统,结合树莓派性能的强大,充分发挥了终端的自主性,以高度的自主性确保执行端系统的正常运行,只需依赖内部局域网,摆脱对外部广域网的依赖,减少网络部署成本。
附图说明
[0027]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
[0028]
图1为本技术实施例提供的一种应用场景示意图;
[0029]
图2为本技术实施例提供的一种基于树莓派的植物环境监测与自动种植系统的结构示意图;
[0030]
图3为本技术实施例提供的一种基于树莓派的植物环境监测与自动种植系统部署示意图;
[0031]
图4为本技术实施例提供的另一种基于树莓派的植物环境监测与自动种植系统的结构示意图。
[0032]
通过上述附图,已示出本技术明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本技术构思的范围,而是通过参考特定实施例为本领域技术人员说明本技术的概念。
具体实施方式
[0033]
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例
中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置的例子。
[0034]
下面以具体地实施例对本技术的技术方案以及本技术的技术方案如何解决上述技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。
[0035]
下面对本技术实施例提供的一种应用场景进行解释:本技术实施例提供的方案,涉及到植物自动种植培养。传感器通过检测大棚中植物生长环境的土壤温湿度、ph值、空气温湿度、二氧化碳浓度、光照和图像等,并将检测到的信息上传到云服务器。云服务对检测到的信息进行分析处理,对农作物执行相应的操作,以实现植物自动化种植培养。例如,检测到土壤的湿度较低时,可对植物执行浇水操作。
[0036]
图1为本技术实施例提供的一种应用场景示意图。如图1所示,大棚10中种植有植物20,传感器30获取大棚10中土壤温湿度、ph值、控制温湿度等环境信息传输到云端,摄像头40将获取的植物图像传输给云端,云端对获取到的环境信息和图像进行处理,当处理完后,得到植物20需要浇水的指令,则对植物20进行浇水操作。
[0037]
在一些技术中,传感器将检测到植物的环境信息和图像传输到云端,由云端处理,终端执行,这需要终端与云端进行大量的数据通讯。云端也需要具有兼容所有数据类型的高兼容性,以及超高的计算能力。但是在偏远地区大面积种植的情况下,广域网的部署难度较大、部署成本较高,或网络异常时易导致系统瘫痪。
[0038]
因此,本技术的实施例提供了一种基于树莓派的植物环境监测与自动种植系统,无线采集设备集群将采集到的图像和环境信息发送给树莓派主控系统,树莓派主控系统接收发送过来的图像和环境信息,并进行处理,生成对应的控制指令,并将指令传输给种植设备组,由种植设备组根据控制指令进行相应的操作,通过对系统整体架构的设计,可充分发挥树莓派的自主性,确保执行端系统的正常运行。
[0039]
下面结合附图,对本技术的一些实施方式作详细说明。在各实施例之间不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
[0040]
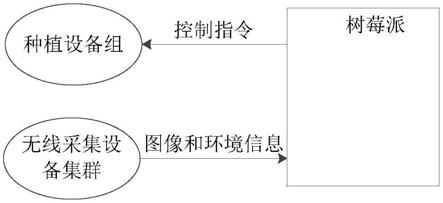
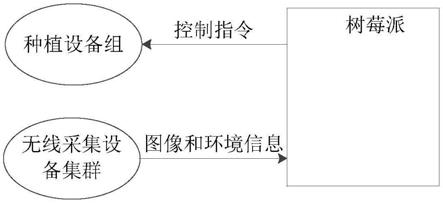
图2为本技术实施例提供的一种基于树莓派的植物环境监测与自动种植系统的结构示意图。如图2所示,本实施例中的系统可以包括:
[0041]
无线采集设备集群,用于采集植物生长的图像和环境信息,并发送给树莓派主控系统;所述树莓派主控系统,用于根据所述图像和环境信息,基于机器学习模型的决策结果,生成对应的控制指令;种植设备组,用于根据所述树莓派主控系统下发的控制指令执行相应的操作;其中,所述种植设备组包括下述至少一项:水肥机、控制光线的遮光控制电机、控制空气流通的卷膜控制电机与通风机、负责浇水灌溉的喷淋系统。
[0042]
可选的,树莓派主控系统可以采用ubuntu server系统作为控制系统。树莓派主控系统中可以包括有多个树莓派。机器学习模型又可称为dqn(deep q network)强化学习算法模型。
[0043]
树莓派主控系统根据获取的图像和环境信息,训练基于dqn强化学习算法的人工智能模型,得到自动种植的决策结果,并生成对应的控制指令。
[0044]
其中,决策结果可以为是否需要浇水,浇水量多少;是否需要通风,通风时长;是否需要通光,通光时长;是否需要施肥,施肥量多少等。
[0045]
控制指令可以用于指示浇水、通风、通光、施肥等。具体的,当控制指令指示为浇水时,控制负责浇水灌溉的喷淋系统进行浇水操作;当控制指令指示为施肥时,控制水肥机进行施肥操作;当控制指令指示为通光时,控制控制光线的遮光控制电机进行增加光照操作;当控制指令指示为通风时,控制控制空气流通的卷膜控制电机与通风机进行通风操作。
[0046]
本实施例中,根据图像和环境信息生成对应的控制指令,可以通过现有的dqn强化学习算法来实现。本实施例对具体的处理算法不作限制,只要能够根据植物的图像和环境信息生成对应的控制指令即可。
[0047]
本实施例提供的基于树莓派的植物环境监测与自动种植系统,包括无线采集设备集群,用于采集植物生长的图像和环境信息,并发送给树莓派主控系统,所述树莓派主控系统,用于根据所述图像和环境信息,生成对应的控制指令,种植设备组,用于根据所述树莓派主控系统下发的控制指令执行相应的操作,其中,所述种植设备组包括下述至少一项:水肥机、控制光线的遮光控制电机、控制空气流通的卷膜控制电机与通风机、负责浇水灌溉的喷淋系统,结合树莓派性能的强大,充分发挥了终端的自主性,以高度的自主性确保执行端系统的正常运行,只需依赖内部局域网,摆脱对外部广域网的依赖,减少网络部署成本。
[0048]
在上述实施例提供的技术方案的基础上,可选的,所述植物环境监测与自动种植系统用于对多个种植区域的植物进行监测;其中,各个种植区域均设置有所述无线采集设备集群和所述种植设备组。
[0049]
可选的,可将大棚中的种植区域划分成多个,其中每个种植区域都设有植物环境检测与自动种植系统,并且每个种植区域均设置有无线采集设备集群和种植设备组。
[0050]
具体的,可将大棚中的种植区域划分成四部分,记为种植区域1、种植区域2、种植区域3和种植区域4,相应的种植区域1设置有无线采集设备集群1和种植设备组1,种植区域2设置有无线采集设备集群2和种植设备组2,
……
,种植区域4设置有无线采集设备集群4和种植设备组4。
[0051]
通过对种植区域进行划分,每个区域设置相应的无线采集设备集群和种植设备组,更灵活地适应不同面积大棚种植不同植物,反馈不同类型数据的业务场景。
[0052]
可选的,所述树莓派主控系统包括设置在不同种植区域的多个树莓派;
[0053]
其中,所述树莓派用于根据对应种植区域内设置的无线采集设备集群采集到的图像和环境信息,生成用于控制对应种植区域内的种植设备组的控制指令。
[0054]
可选的,各个不同种植区域设置有不同的树莓派,所述树莓派与相应种植区域处的无线采集设备集群和种植设备组连接。树莓派会获取相应种植区域处的无线采集设备集群采集到的植物生长图像和环境信息,并对图像和环境信息进行分析,基于dqn强化学习算法模型对图像和环境信息进行分析,生成控制指令,并下发给对应种植区域的种植设备组,由种植设备组执行相应的指令操作。
[0055]
具体的,种植区域1中有树莓派1、无线采集设备集群1和种植设备组1,树莓派1获取无线采集设备集群1采集到的植物生长图像和环境信息,生成施肥指令,并下发给种植设备组1,以使种植设备组1根据施肥指令控制水肥机进行施肥操作。
[0056]
每一种植区域设置有相应的树莓派获取相应种植区域中无线采集设备集群采集到的植物生长图像和环境信息,基于dqn强化学习算法模型对图像和环境信息进行分析,并生成控制指令给对应种植区域的种植设备组执行控制指令,不同树莓派对不同种植区域进
行分布式管理,提高树莓派的自主性,以及数据处理和管控能力。
[0057]
可选的,所述树莓派主控系统包括下述至少一项:用于连接互联网的网络接口、wifi模块、数据存储单元、触摸屏、用于外接显示器的hdmi(high definition multimedia interface,高清多媒体)接口。
[0058]
其中,用于连接互联网的网络接口可以是以太网接口,接口类型有aui接口,bnc接口和console接口等。wifi模块可以帮助树莓派直接利用wifi联入互联网。数据存储单元可用于存储无线采集设备集群采集到的图像和环境信息数据,以及得到的行为数据等信息。触摸屏可实现简便便捷的人机交互方式。用于外接显示器的hdmi接口可以提供更高的数据传输宽带。
[0059]
树莓派中控系统包括有用于连接互联网的网络接口、wifi模块、数据存储单元、触摸屏、用于外接显示器的接口,可帮助树莓派在接收信息下发指令时更加高效,便于接收传输过来的图像和环境信息,并且提高下发控制指令的效率。
[0060]
可选的,所述无线采集设备集群包括用于采集环境信息的检测传感器和用于采集图像的摄像头。
[0061]
其中,检测传感器可用于采集植物生长的环境信息,摄像头可用于采集植物生长的图像。
[0062]
检测传感器和摄像头可实时采集图像的环境信息和图像,发送给树莓派主控系统。
[0063]
无线采集设备集群包括有检测传感器和摄像头,可较全面的检测影响植物生长的环境因素,提高对植物的各方面影响因素的检测。
[0064]
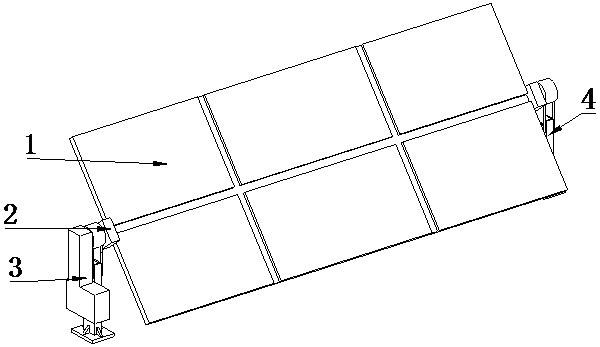
图3为本技术实施例提供的一种基于树莓派的植物环境监测与自动种植系统部署示意图。如图3所示,从树莓派与主树莓派之间通过无线局域网连接,主树莓派通过无线局域网与检测传感器和摄像头连接,每一从树莓派通过无线局域网与无线采集设备集群和执行设备建立连接。
[0065]
其中,无线采集设备集群包括有检测传感器和摄像头,执行设备包括有水肥机、遮光控制电机、卷膜控制电机、喷淋系统和通风机。
[0066]
可选的,所述检测传感器包括用于采集土壤温湿度、ph、空气温湿度、二氧化碳浓度和光照信息的多合一传感器。
[0067]
其中,检测传感器可采用市面上成熟的基于wifi的集土壤温湿度、ph、空气温湿度、二氧化碳浓度和光照信息的多合一传感器。
[0068]
检测传感器可将检测到的土壤温湿度、ph、空气温湿度、二氧化碳浓度和光照信息发送给树莓派主控系统。
[0069]
检测传感器采用多合一传感器,全面获取植物生长的环境信息,为树莓派主控系统提供更准确的环境信息。
[0070]
可选的,所述检测传感器、所述摄像头和所述种植设备组均设置有无线通信模块。
[0071]
其中,种植设备组可以采用市面上成熟的可以基于wifi远程控制的执行端。
[0072]
检测传感器中设置有无线通信模块,与树莓派主控系统中的传感器前置建立无线软连接链路,摄像头中设置有无线通信模块,与树莓派主控系统中的图像采集服务建立无线软连接链路,种植设备组中设置有无线通信模块,与树莓派主控系统中的种植执行设备
控制中枢建立无线软连接链路。
[0073]
其中,无线软连接链路指可以支持至少两种网络连接方式,连接方式可以是4g、5g或wifi等。
[0074]
通过无线通信模块建立连接,可以摆脱广域网的束缚,降低网络部署成本,实现降本管理。
[0075]
在上述各实施例提供的技术方案的基础上,可选的,树莓派主控系统内部可以包括主业务服务、python数据处理脚本引擎、图像采集服务、图像识别引擎、基于dqn强化学习算法的决策服务、db/redis、节点间消息/数据同步客户端、节点间消息/数据同步服务端、传感器采集前置、种植执行设备控制中枢服务。
[0076]
其中,python数据处理脚本引擎用于对植物生长的环境信息进行数据计算,并将计算结果发送至主业务服务。图像采集服务用于获取植物生长的图像,并将图像存储到db中。图像识别引擎用于读取db中的图像进行分析,得到植物的各个生长阶段,并将分析结果发送至主业务服务。主业务服务可以自主的通过python数据处理脚本引擎的结果,基于dqn强化学习算法的决策服务学习到最佳的种植策略,生成对应的控制指令,并下发给种植执行设备控制中枢服务。db/redis用于存储无线采集设备集群采集到的植物生长的图像和环境信息。节点间消息/数据同步客户端和节点间消息/数据同步服务端用于将不同从属关系的树莓派之间进行数据和消息同步。传感器采集前置用于将获取到的植物生长环境信息传输给python数据处理脚本引擎。种植执行设备控制中枢服务用于接收主页服务下发的控制指令,并将控制指令传输给种植设备。
[0077]
可选的,无线采集设备集群将采集到的植物生长的图像和环境信息发送给树莓派主控系统,树莓派主控系统中的图像采集服务将植物生长的图像缓存到本地文件,存储到db中,redis对采集到的植物生长的环境信息进行存储,传感器采集前置将获取到的环境信息,通过数据总线和消息总线发送给python数据处理脚本引擎处,利用python数据处理脚本引擎对环境数据进行计算,将计算得到的处理结果通过数据总线和消息总线逐级上传至主业务服务。图像识别引擎读取db中存储的图像,并结合dqn强化学习算法与redis中的植物生长的环境信息,实时动态的分析植物各个生长阶段,并将分析结果通过消息总线和数据总线发送至主业务服务。主业务服务通过python数据处理脚本引擎和图像识别引擎上传的分析结果,生成对应的控制指令,下发给种植执行设备控制中枢服务,种植执行设备控制中枢服务将控制命令发送给种植设备组,种植设备组根据控制指令进行相应的操作。
[0078]
可选的,无线采集设备集群的获取到的图像和环境信息状态改变,上报给传感器采集前置,传感器采集前置通过对图像和环境信息进行解析和处理,上传数据到数据总线,写入实时值到redis,同时发送监测数据变化消息到消息总线,python数据处理脚本引擎接收监测数据变化消息,根据数据进行运算,并将得到的控制指令数据存储到db中,同时发送操作激活命令给主业务服务。待主业务收到命令后,根据db中的控制指令数据发送对应控制指令给种植执行设备控制中枢服务,按照控制指令执行相应的操作。
[0079]
可选的,主业务自主执行流程可分为主动执行和被动执行。被动执行指主业务服务周期性的检测db中由python数据处理脚本引擎写入的操作策略数据,发现如果有未操作的策略数据时,则发送对应操作命令给种植执行设备控制中枢服务,进行相应的操作。
[0080]
主动执行流程指当python数据处理脚本引擎处理监测数据时,发现部分数据已经
到达阈值,达到必须要立刻进行通风/通光/浇水/施肥等操作时,python数据处理脚本引擎处在写入操作策略数据到db后,同时发送操作激活命令给主业务服务。待主业务服务收到命令后,根据db中操作策略发送对应操作命令给种植执行设备控制中枢服务,进行相应的通风/通光/浇水/施肥等操作。
[0081]
以智能浇水灌溉为例,可结合植物的环境信息和图像的连续监控数据,构建智能浇水灌溉规则。在构建智能浇水灌溉规则时,可将模型分为离线训练系统和在线智能控制系统。在系统初始化阶段,将离线训练图像和环境信息打包到树莓派的硬盘中,将打包好的大量连续的植物图像和环境信息输入到模型离线训练系统中,植物的生长实时状态作为dqn的价值判断信息,浇水灌溉的时长、时间节点和浇水灌溉量作为可选的行动参数,以多层非线性神经网路构建成的深层模型为基础算法网络,共同构成浇水装置的dqn算法模型,通过对大量离线历史数据进行训练学习,得到模型训练结果,获得结果模型。
[0082]
在线智能控制系统会加载被训练好的结果模型,通过图像采集服务定时接收采集到的图像,和传感器采集前置获取到的环境信息,输入到训练好的结果模型中利用dqn算法,对植物状态进行预测和判别,采取能够获得最优预期受益结果的浇水灌溉行为数据,决定某一阶段的浇水灌溉时长、时间节点和浇水灌溉量,实现精细化控制,最终控制种植执行设备控制中枢服务的智能浇水灌溉模块进行浇水灌溉行为。
[0083]
其中,浇水灌溉行为数据包括浇水灌溉时长、时间节点和浇水灌溉量。
[0084]
在植物初始生长阶段,可以通过无线采集设备集群获取到植物生长的图像和环境信息,作为结果模型的输入植物状态数据,python数据处理脚本引擎和图像识别引擎结合dqn算法对输入的状态数据进行计算和数据挖掘,得到植物生长全景图和最优成长资源的配置方案。具体的,可以得到植物生长的全景图可以分为幼苗阶段,开花阶段、结果阶段、成熟阶段和枯萎阶段,以及决定每一阶段的浇水灌溉行为数据可以使得植物最优的生长。其中,图像识别引擎可以将得到植物生长全景图和最优成长资源配置方案写入db中,供主业务服务读取。
[0085]
其中,植物状态数据可以是植物生长的图像和环境信息。
[0086]
当植物在生长阶段过程中,无线采集设备集群可以获取植物的生长环境和图像,树莓派可以根据当前植物的状态数据和该阶段计算出的最优浇水灌溉行动数据进行参数数据解析,计算出该阶段浇水的预期收益,根据预期收益采取下一步的浇水灌溉行动,选择最优的浇水灌溉时长、时间节点和浇水灌溉量。这个过程可以以秒为时间间隔连续进行,浇水灌溉的动作根据通过dqn算法得到的某一阶段的最优浇水行为数据以及输入的当前新的状态数实时调整,前后连续的浇水灌溉动作之间存在连续性。
[0087]
树莓派主控系统中的图像采集服务会将所采集的图像信息交给树莓派主控系统中的图像识别引擎处理,结合主业务服务与种植执行设备控制中枢服务,可以形成基于强化学习的智能浇水灌溉系统。图形识别引擎的智能浇水灌溉系统,可以以最优预期受益结果的浇水灌溉行为,决定浇水灌溉的时长、时间节点和浇水灌溉量,实现精细化控制,提高浇水灌溉效率,实现降本增效管理。
[0088]
通过对植物状态数据的连续学习,采取动态、具有预测性、精细化的智能浇水灌溉方式,减少水资源浪费,并且提高浇水灌溉的精细化控制能力,为植物提供更好的成长养护。
[0089]
可选的,其它的控制指令,例如施肥指令、通风指令和通光指令同样可以通过dqn算法训练,得到相应的行为数据。
[0090]
可选的,所述植物环境监测与自动种植系统还包括用户设备;所述树莓派主控系统还用于接收用户设备通过蓝牙发送的控制指令,并根据接收到的控制指令控制种植设备组。
[0091]
其中,用户设备可以是手机端。用户可以在手机端查看植物的生长状态,监控植物的生长情况,同时也可以通过手机端下发指令给树莓派。
[0092]
可选的,树莓派主控系统中还包括蓝牙连接业务处理服务,该服务用于在初始配置时,需要手机应用软件通过蓝牙连接树莓派的节点,获取节点的mac(media access control)地址与内网ip(internet protocol,网际互连协议),还有与其相连的检测传感器,发送到手机端。
[0093]
当用户在大棚内时,手机端可以通过蓝牙连接获取树莓派、检测传感器和摄像头的相应信息。用户可以根据检测传感器和摄像头发送过来环境信息和图像在手机上查看植物的生长情况,并通过手机端的蓝牙设备将控制指令下发给树莓派,树莓派根据接收的指令控制种植设备组。
[0094]
基于树莓派自动种植的同时,用户可以在手机端观察到的植物情况,直接下发指令,对植物进行浇水、施肥、通风和增强光照等操作,可帮助用户实时监测大棚内植物的生长状况,对于植物出现特殊情况时,及时给予人工干预。
[0095]
可选的,所述植物环境监测与自动种植系统还包括云端设备;
[0096]
所述树莓派主控系统还用于接收云端设备发送的控制指令,并根据接收到的控制指令控制种植设备组;
[0097]
其中,所述云端设备发送的控制指令为所述云端设备从用户设备获取到的控制指令。
[0098]
可选的,python数据处理脚本引擎和图像识别引擎也可以存储在云端设备中,进行数据的计算,再将计算结果下发给树莓派。树莓派可以根据该计算结果控制种植设备组进行相应的操作。但这种情况出现的较少。
[0099]
可选的,当用户不在大棚中时,手机端可以将控制指令下发给云端,由云端下发指令给树莓派,树莓派根据控制指令控制种植设备组执行相应的操作。
[0100]
具体的,当用户在手机端查看到摄像头传输过来的植物图像比较蔫,则下发浇水指令给云端,云端接收到浇水指令后,将浇水指令下发给树莓派,树莓派控制负责浇水灌溉的喷淋系统对植物进行及时浇水操作。
[0101]
用户通过云端将控制指令下发给树莓派,可实现用户在距离大棚较远的位置监测控制大棚中植物的生长情况。
[0102]
可选的,所述多个树莓派包括主树莓派以及至少一个从树莓派;所述主树莓派与所述用户设备和云端设备通信连接以接收所述用户设备或云端设备发送的控制指令;所述主树莓派还用于确定所述用户设备或云端设备发送的控制指令对应的种植区域,并将接收到的控制指令发送给对应的从树莓派。
[0103]
其中,树莓派主控系统中包括有多个树莓派,多个树莓派中包括有一个主树莓派和除主树莓派以外的至少一个从树莓派。主树莓派可用于接收用户设备或是云端设备下发
的控制指令,并确定控制指令对应的种植区域,将控制指令传输给对应种植区域的从树莓派。
[0104]
可选的,树莓派主控系统可以通过节点消息/数据同步客户端和节点消息/数据同步服务端建立多层级分布式部署结构。其中,客户端可以是树莓派端,服务端可以是指手机端。当下级节点数据/消息同步服务端时,下级节点接收到数据/消息改变,通过http发送数据/消息改变,本节点数据/消息同步客户端,如果是数据,同步到数据总线,根据数据类型区分实时数据/db数据,分别存储到redis中或db中。如果是消息,同步到消息总线。
[0105]
可选的,当上级节点数据/消息同步客户端时,上级节点接收到数据/消息改变,通过http发送数据/消息改变,本节点数据/消息同步服务端,如果是数据,同步到数据总线,根据数据类型区分实时数据/db数据,分别存储到redis中或db中。如果是消息,同步到消息总线。
[0106]
建立主树莓派和从树莓派的从属关系,以及多层级分布式部署,支持多活,确保稳定性的同时,有较高的可扩展性。
[0107]
图4为本技术实施例提供的另一种基于树莓派的植物环境监测与自动种植系统的结构示意图。如图4所示,用户在使用用户端操控树莓派时,可先通过使用应用软件登录后台服务,下载好配置模板。在系统部署后,先使用蓝牙连接主树莓派,当监听到蓝牙被连接,获取主树莓派的ip/mac地址以及检测传感器列表,再连接从树莓派的ip/mac地址以及检测传感器列表。系统初始化后,默认存在一个主树莓派,在应用软件端建立树莓派之间的主从结构、树莓派下所属检测传感器列表,将编辑后数据下发给主树莓派。主树莓派根据结构信息,分发给各个节点建立系统连接网络。
[0108]
其中,主树莓派通过无线局域网与无线采集设备集群和种植设备组建立连接,并与其他从属此树莓派的子树莓派建立连接,传递信息。从树莓派通过无线局域网与无线采集设备集群和种植设备组建立连接,并与其他从属此树莓派的子树莓派建立连接,传递信息。
[0109]
通过对系统整体架构的设计,充分利用强大的性能,实现采集、处理、控制一体化的自动种植,充分发挥了终端的自主性,在无人值守的情况下实现全自动种植。
[0110]
需要说明的是,本技术实施例中需要用到的软件设计均可以采用现有的软件来实现,不需要对软件进行改进或调整。
[0111]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0112]
最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。