1.本实用新型涉及一种用于机械式停车设备车辆车身尺寸与位置的检测装置。
背景技术:
2.传统的机械式停车设备通常不具备车辆车身尺寸测量的功能,一般是通过光电传感器以及光幕或者非动态的距离传感设备进行测量,只能通过所设置的传感器的检测出传感器所覆盖位置的车辆尺寸是否超出限制范围,也不能判断车辆位于检测范围内的具体位置只有车辆超出限制范围后才能判断车辆的大约位置,也不能通过比较直观的方式显示出车辆的位置。
技术实现要素:
3.本实用新型的目的在于克服现有技术中存在的上述缺陷,而提供一种精度高适用于机械式停车设备车辆车身尺寸与位置的测量装置。
4.本实用新型采用技术方案如下:
5.一种用于机械式停车设备车辆车身尺寸与位置的检测装置,该装置安装在车辆入库通过的检测区,包括第一激光扫描传感器、第二激光扫描传感器、激光测距传感器、引导显示屏和数据处理器,所述检测区的垂直方向上设有第一激光扫描传感器和第二激光扫描传感器;检测区水平方向的里侧设有激光测距传感器;所述检测区里侧设有引导显示屏;所述的数据处理器通过数据传输总线连接各传感器。
6.作为优选,所述的第一激光扫描传感器和第二激光扫描传感器分别位于垂直方向距离中轴线1500mm,距离水平面2500mm且对称设置。
7.作为优选,所述的激光测距传感器位于检测区来车方向的中轴线上,且设于地面以上600mm处。
8.作为优选,所述的第一激光扫描传感器和第二激光扫描传感器所形成的扫描切面,并根据激光测距传感器测量值按照每5mm变化数据处理器记录一个扫描切面的数据,通过数据处理器将所得的所有切面数据进行组合而得到一个完整的车辆车身尺寸,且数据处理器可计算出车辆与述的第一激光扫描传感器和第二激光扫描传感器中轴线之间的相对位置和激光测距传感器的距离,从而计算出车辆所在的位置。
9.作为优选,所述激光测距传感器的测距精度为0.1mm。
10.作为优选,第一激光扫描传感器和第二激光扫描传感器的扫描精度为0.1mm。
11.作为优选,所述的数据处理器为西门子s7
‑
1500可编程控制器。
12.作为优选,所述的引导显示屏为工业级21.5寸lcd显示屏,且设于地面1000mm处。
13.与现有技术相比,本实用新型具有以下优点:
14.1.可精确测量车辆的车身尺寸,包括异型部分。
15.2.可计算得出车辆所在精确位置。
16.3.能简化机械式停车设备用于车辆超限范围检测是传感器布置数量。
17.4.能在引导显示屏上显示车辆的实时位置,提示驾驶员及时调整车辆位置。
附图说明
18.为了更清楚地说明本实用新型具体实施方式或现有技术中的方案,下面将对具体实施方式或现有技术描述中所使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
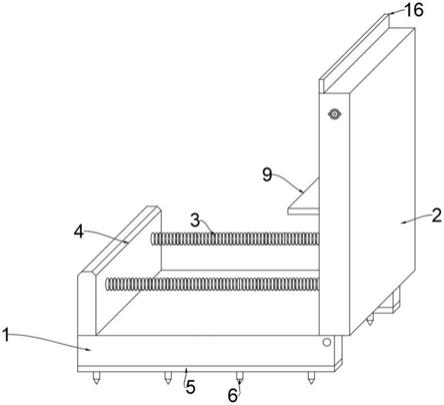
19.图1是本实施例产品的结构示意图。
20.图2是图1的俯视图。
21.图3是图1的左视图。
22.图4是本实施例产品的电器原理图。
23.图5是本实施例产品测量过程中的外形测量切面轮廓图。
24.图6是本实施例激光扫描工作面。
25.标号说明:第一激光扫描传感器1、第二激光扫描传感器2、激光测距传感器3、数据处理器4、引导显示屏5、检测区6。
具体实施方式
26.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例:
28.如图1
‑
6所示,本实施例的一种用于机械式停车设备车辆车身尺寸与位置的检测装置,该装置安装在车辆入库通过的检测区6,包括第一激光扫描传感器1、第二激光扫描传感器2、激光测距传感器3、数据处理器4、引导显示屏5,检测区6的垂直方向上设有第一激光扫描传感器1和第二激光扫描传感器2;检测区6水平方向的里侧设有激光测距传感器3;检测区6水平方向的里侧设有引导显示屏5;数据处理器4通过数据传输总线连接各传感器,本实施例中的数据处理器4为西门子s7
‑
1500可编程控制器。
29.本实施例的第一激光扫描传感器1和第二激光扫描传感器2分别位于垂直方向的距离中轴线1500mm,距离水平面2500mm。其中,第一激光扫描传感器1和第二激光扫描传感器2的扫描精度为0.1mm。
30.更为具体地,本实施例的第一激光扫描传感器1和第二激光扫描传感器2所形成的扫描切面,并根据激光测距传感器3测量值按照每5mm变化数据处理器记录一个扫描切面的数据,通过数据处理器4将所得的所有切面数据进行组合而得到一个完整的车辆车身尺寸,且数据处理器4可计算出车辆与述的第一激光扫描传感器1和第二激光扫描传感器2中轴线之间的相对位置和激光测距传感器3的距离,从而计算出车辆所在的位置。
31.本实施例的激光测距传感器3位于停检测区6来车方向中轴线上,且设于地面以上600mm处。该激光测距传感器3的测距精度为0.1mm
32.本实施例的引导显示屏5位于检测区6里侧,引导显示屏5为工业级21.5寸lcd显示屏,且设于地面以上1000mm处。
33.本产品能够实现车辆在行驶过程中检测完整车身尺寸和确定车辆位置,并根据测量结果以动画的方式显示在引导显示屏上,实时提示驾驶员车辆状态并及时调整车辆位置。
34.工作原理:
35.本产品的设于机械车库存车入口或机械车库停车场入口等需要对车辆的长宽高进行测量的地方。测量方式:
36.1、激光测距传感器3检测汽车与参考点的距离。
37.2、第一激光扫描传感器1和第二激光扫描传感器2检测汽车在扫描切面的数据。
38.3、数据处理器4根据激光测距传感器3检测距离变化分别记录不同距离的扫描切面数据。
39.4、据处理器将所得的所有切面数据进行组合而得到一个完整的车辆车身尺寸。
40.5、数据处理器可计算出车辆与述的第一激光扫描传感器和第二激光扫描传感器中轴线之间的相对位置和激光测距传感器的距离,从而计算出车辆所在的位置。
41.6、通过以上数据信息我们可以模拟出车辆的行驶或者停放时实时数据并通过模拟动画的方式展示在机械式停车设备出入口的引导显示屏,以帮助驾驶员及时纠正行驶方向。当车辆停放好后可以准确计算出车辆的尺寸是否符合机械式停车设备要求,以及车辆停放位置是否在安全区域内。
42.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。