1.本实用新型涉及机器人技术领域,尤其涉及一种共享物资运输机器人。
背景技术:
2.机器人(robot)是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.城镇化加速发展,各个城市高楼林立,中国这么多城市的高楼,人们只能携带重物上楼,束缚了双手,而且上楼将很吃力,即使乘坐电梯也会被手上的重物而束缚双手,并且在乘坐电梯过程中感到劳累,同时对于老年人以及腿脚不便的人士来说,自己本身上楼不便,而且还要手提重物,上楼更加不便,所以我们提出一种共享物资运输机器人,用以解决上述所提到的问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种共享物资运输机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种共享物资运输机器人,包括第一箱体、第二箱体和放置箱,所述第一箱体和第二箱体均位于放置箱的下方,所述放置箱的底部滑动连接有第二套筒,所述第二套筒的内壁滑动连接有第一固定杆,所述第一固定杆的底部延伸至第二套筒的下方并与第二箱体的顶部固定连接,所述放置箱的底部固定连接有第一套筒,所述第一套筒的内壁滑动连接有第二固定杆,所述第二固定杆的底部延伸至第一套筒的下方并与第一箱体的顶部固定连接,所述第一箱体和第二箱体的内部设置有用于控制装置爬楼的爬楼组件,所述放置箱的内部设置有gps模块、蓝牙模块和树莓派主板。
7.优选地,所述爬楼组件包括固定连接在第一箱体内部的第二电动推杆,所述第一箱体的一侧内壁滑动连接有第二滑动板,所述第二滑动板的一端延伸至第二箱体的内部,所述第二电动推杆的活塞杆固定连接有第一滑动块,所述第一滑动块的顶部与第二滑动板的底部固定连接,所述第二滑动板的顶部固定连接有第一电动推杆,所述第一电动推杆的活塞杆固定连接有第二滑动杆,所述第二滑动杆的底部与第二滑动板的顶部滑动连接,所述第二箱体的一侧开设有第二通孔,所述第二滑动杆的一端贯穿第二通孔并固定连接有第二限位板,所述第二滑动杆的顶部固定连接有第二挡板,且第二挡板的一侧与第二箱体的一侧内壁相接触。
8.优选地,所述爬楼组件还包括固定连接在第二箱体内部的第四电动推杆,所述第二箱体的一侧内壁滑动连接有第一滑动板,所述第一滑动板的一端延伸至第一箱体的内部,所述第四电动推杆的活塞杆固定连接有第二滑动块,所述第二滑动块的底部与第一滑
动板的顶部固定连接,所述第一滑动板的底部固定连接有第三电动推杆,所述第三电动推杆的活塞杆固定连接有第一滑动杆,所述第一滑动杆的顶部与第一滑动板的底部滑动连接,所述第一箱体的一侧开设有第一通孔,所述第一滑动杆的一端贯穿第一通孔并固定连接有第一限位板,所述第一滑动杆的底部固定连接有第一挡板,且第一挡板的一侧与第一箱体的一侧内壁相接触。
9.优选地,所述第一箱体和第二箱体的外壁均固定连接有多个摄像头。
10.优选地,所述第一箱体的底部内壁固定连接有配重块。
11.优选地,所述第一箱体和第二箱体的底部均固定连接有多个底座。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型中,在使用时,通过蓝牙模块对装置进行解锁,将所需要搬运的物品放置在放置箱的内部,开始上楼;
14.2、本实用新型中,第二箱体的上移,启动第二电动推杆,第二电动推杆的活塞杆带动第一滑动块竖直向上移动,第一滑动块带动第二滑动板竖直向上移动,第二滑动板带动第一电动推杆和第二滑动杆竖直向上移动,第二滑动杆带动第二箱体竖直向上移动,第二箱体带动第一固定杆竖直向上移动,第一固定杆带动第二套筒竖直向上移动,第二套筒带动放置箱竖直向上移动,此时第二箱体带动第一滑动板和第一滑动杆竖直向上移动,第一滑动杆的顶部与第一通孔的顶部内壁相抵触;
15.3、本实用新型中,第二箱体的横向移动,启动第一电动推杆,第一电动推杆的输出轴带动第二滑动杆横向移动,第二滑动杆带动第二挡板横向移动,第二挡板带动第二箱体横向移动,第二箱体带动第一固定杆横向移动,第一固定杆带动第二套筒横向移动,同时第二箱体带动第一滑动板、第三电动推杆和第一滑动杆横向移动,第一限位板的一侧与第一箱体的一侧相抵触;
16.4、本实用新型中,第二滑动杆和第二滑动板的复位,启动第二电动推杆,第二电动推杆的活塞杆带动第二滑动板竖直向下移动,第二滑动板带动第二滑动杆竖直向下移动,进而使得第二滑动杆的底部与第二通孔的底部内壁相抵触,启动第一电动推杆,第一电动推杆的活塞杆带动第二滑动杆横向移动,第二滑动杆带动第二限位板横向移动,使得第二限位板的一侧与第二箱体的一侧相抵触,第二箱体和第一箱体不会发生移动,完成对第二滑动杆与第二滑动板的复位;
17.5、本实用新型中,第一箱体的上移,启动第四电动推杆,第四电动推杆的活塞杆带动第二滑动块竖直向上移动,第二滑动块带动第一滑动板竖直向上移动,第一滑动板带动第一滑动杆竖直向上移动,第一滑动杆带动第一箱体竖直向上移动,第一箱体带动第二固定杆、第二电动推杆、第二滑动板和第二滑动杆竖直向上移动,第二滑动杆的顶部与第二通孔的顶部内壁相抵触;
18.6、本实用新型中,第一箱体的横向移动,启动第三电动推杆,第三电动推杆的活塞杆带动第一滑动杆横向移动,第一滑动杆带动第一限位板横向移动,进而带动第一箱体横向移动,第一箱体带动第二滑动杆横向移动,进而延伸至第二箱体的外部,使第二滑动杆恢复至初始状态;
19.7、本实用新型中,第一滑动杆和第一滑动板的复位,启动第四电动推杆,第四电动推杆的活塞杆带动第一滑动板竖直向上移动,第一滑动板带动第一滑动杆竖直向下移动,
进而使得第一滑动杆的顶部与第一通孔的顶部内壁相抵触,启动第三电动推杆,第三电动推杆的活塞杆带动第一滑动杆横向移动,第一滑动杆带动第一挡板横向移动,使得第一挡板的一侧与第一箱体的一侧内壁相抵触,第二箱体和第一箱体不会发生移动,完成对第一滑动杆与第一滑动板的复位;
20.8、本实用新型中,进而装置便可重复上述步骤完成上楼过程,安装在装置四周的摄像头用来识别四周的障碍物,控制装置的行进方向实现避障功能,在此过程中通过摄像头对环境的建模以及gps对走过的路线进行记录,以便返回时实现自动返回,最后通过扫码实现装置的开锁上锁,并且通过手机app上的遥控行走功能或者语音控制行走功能,方便使用者可以将物资放置到想要放置的位置。
21.本实用新型结构简单,可以减轻人们在上下楼运送物资的负担,腾出双手来做其他事情,同时遥控控制行走可以将物资遥控放到想放置的位置,不需要人在进行多余的搬运,在放下物资后,机器人可以按照原来的路线原路返回,方便其他人的使用,实现共享的功能,使用方便。
附图说明
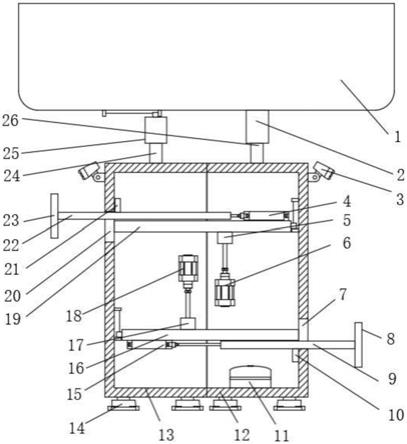
22.图1为本实用新型提出的一种共享物资运输机器人初始状态的主视剖视结构示意图;
23.图2为本实用新型提出的一种共享物资运输机器人第二箱体上升的主视剖视结构示意图;
24.图3为本实用新型提出的一种共享物资运输机器人第二箱体横向移动的主视剖视结构示意图;
25.图4为本实用新型提出的一种共享物资运输机器人第二滑动杆收回的主视剖视结构示意图;
26.图5为本实用新型提出的一种共享物资运输机器人第一箱体上升的主视剖视结构示意图;
27.图6为本实用新型提出的一种共享物资运输机器人第一箱体横向移动的主视剖视结构示意图;
28.图7为本实用新型中第一固定杆和第二套筒的主视剖视结构示意图。
29.图中:1、放置箱;2、第一套筒;3、摄像头;4、第一电动推杆;5、第一滑动块;6、第二电动推杆;7、第一通孔;8、第一限位板;9、第一滑动杆;10、第一挡板;11、配重块;12、第一箱体;13、第二箱体;14、底座;15、第三电动推杆;16、第一滑动板;17、第二滑动块;18、第四电动推杆;19、第二滑动板;20、第二通孔;21、第二挡板;22、第二滑动杆;23、第二限位板;24、第一固定杆;25、第二套筒;26、第二固定杆。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
31.实施例一
32.参照图1
‑
7,一种共享物资运输机器人,包括第一箱体12、第二箱体13和放置箱1,第一箱体12和第二箱体13均位于放置箱1的下方,放置箱1的底部滑动连接有第二套筒25,第二套筒25的内壁滑动连接有第一固定杆24,第一固定杆24的底部延伸至第二套筒25的下方并与第二箱体13的顶部固定连接,放置箱1的底部固定连接有第一套筒2,第一套筒2的内壁滑动连接有第二固定杆26,第二固定杆26的底部延伸至第一套筒2的下方并与第一箱体12的顶部固定连接,第一箱体12和第二箱体13的内部设置有用于控制装置爬楼的爬楼组件,放置箱1的内部设置有gps模块、蓝牙模块和树莓派主板。
33.实施例二
34.参照图1
‑
7,本实用新型提供一种技术方案,一种共享物资运输机器人,包括第一箱体12、第二箱体13和放置箱1,第一箱体12和第二箱体13均位于放置箱1的下方,放置箱1的底部滑动连接有第二套筒25,第二套筒25的内壁滑动连接有第一固定杆24,第一固定杆24的底部延伸至第二套筒25的下方并与第二箱体13的顶部固定连接,放置箱1的底部固定连接有第一套筒2,第一套筒2的内壁滑动连接有第二固定杆26,第二固定杆26的底部延伸至第一套筒2的下方并与第一箱体12的顶部固定连接,第一箱体12和第二箱体13的内部设置有用于控制装置爬楼的爬楼组件,爬楼组件包括固定连接在第一箱体12内部的第二电动推杆6,第一箱体12的一侧内壁滑动连接有第二滑动板19,第二滑动板19的一端延伸至第二箱体13的内部,第二电动推杆6的活塞杆固定连接有第一滑动块5,第一滑动块5的顶部与第二滑动板19的底部固定连接,第二滑动板19的顶部固定连接有第一电动推杆4,第一电动推杆4的活塞杆固定连接有第二滑动杆22,第二滑动杆22的底部与第二滑动板19的顶部滑动连接,第二箱体13的一侧开设有第二通孔20,第二滑动杆22的一端贯穿第二通孔20并固定连接有第二限位板23,第二滑动杆22的顶部固定连接有第二挡板21,且第二挡板21的一侧与第二箱体13的一侧内壁相接触,爬楼组件还包括固定连接在第二箱体13内部的第四电动推杆18,第二箱体13的一侧内壁滑动连接有第一滑动板16,第一滑动板16的一端延伸至第一箱体12的内部,第四电动推杆18的活塞杆固定连接有第二滑动块17,第二滑动块17的底部与第一滑动板16的顶部固定连接,第一滑动板16的底部固定连接有第三电动推杆15,第三电动推杆15的活塞杆固定连接有第一滑动杆9,第一滑动杆9的顶部与第一滑动板16的底部滑动连接,第一箱体12的一侧开设有第一通孔7,第一滑动杆9的一端贯穿第一通孔7并固定连接有第一限位板8,第一滑动杆9的底部固定连接有第一挡板10,且第一挡板10的一侧与第一箱体12的一侧内壁相接触,可使得装置可以携带物品自动爬楼,不在需要人工手动搬运物品上下楼,节省了大量的时间和精力,放置箱1的内部设置有gps模块、蓝牙模块和树莓派主板,第一箱体12和第二箱体13的外壁均固定连接有多个摄像头3,可以通过建模检测周围环境以及障碍物,来达到避障功能,避免装置撞到行人或墙壁,延长装置的使用寿命,第一箱体12的底部内壁固定连接有配重块11,第一箱体12和第二箱体13的底部均固定连接有多个底座14,使得装置在上楼的时候中信保持稳定,不容易倾倒。
35.工作原理:在使用时,通过蓝牙模块对装置进行解锁,将所需要搬运的物品放置在放置箱1的内部,开始上楼;
36.第二箱体13的上移,启动第二电动推杆6,第二电动推杆6的活塞杆带动第一滑动块5竖直向上移动,第一滑动块5带动第二滑动板19竖直向上移动,第二滑动板19带动第一电动推杆4和第二滑动杆22竖直向上移动,第二滑动杆22带动第二箱体13竖直向上移动,第
二箱体13带动第一固定杆24竖直向上移动,第一固定杆24带动第二套筒25竖直向上移动,第二套筒25带动放置箱1竖直向上移动,此时第二箱体13带动第一滑动板16和第一滑动杆9竖直向上移动,第一滑动杆9的顶部与第一通孔7的顶部内壁相抵触,如图2所示;
37.第二箱体13的横向移动,启动第一电动推杆4,第一电动推杆4的输出轴带动第二滑动杆22横向移动,第二滑动杆22带动第二挡板21横向移动,第二挡板21带动第二箱体13横向移动,第二箱体13带动第一固定杆24横向移动,第一固定杆24带动第二套筒25横向移动,同时第二箱体13带动第一滑动板16、第三电动推杆15和第一滑动杆9横向移动,第一限位板8的一侧与第一箱体12的一侧相抵触,如图3所示;
38.第二滑动杆22和第二滑动板19的复位,启动第二电动推杆6,第二电动推杆6的活塞杆带动第二滑动板19竖直向下移动,第二滑动板19带动第二滑动杆22竖直向下移动,进而使得第二滑动杆22的底部与第二通孔20的底部内壁相抵触,启动第一电动推杆4,第一电动推杆4的活塞杆带动第二滑动杆22横向移动,第二滑动杆22带动第二限位板23横向移动,使得第二限位板23的一侧与第二箱体13的一侧相抵触,第二箱体13和第一箱体12不会发生移动,完成对第二滑动杆22与第二滑动板19的复位,如图4所示;
39.第一箱体12的上移,启动第四电动推杆18,第四电动推杆18的活塞杆带动第二滑动块17竖直向上移动,第二滑动块17带动第一滑动板16竖直向上移动,第一滑动板16带动第一滑动杆9竖直向上移动,第一滑动杆9带动第一箱体12竖直向上移动,第一箱体12带动第二固定杆26、第二电动推杆6、第二滑动板19和第二滑动杆22竖直向上移动,第二滑动杆22的顶部与第二通孔20的顶部内壁相抵触,如图5所示;
40.第一箱体12的横向移动,启动第三电动推杆15,第三电动推杆15的活塞杆带动第一滑动杆9横向移动,第一滑动杆9带动第一限位板8横向移动,进而带动第一箱体12横向移动,第一箱体12带动第二滑动杆22横向移动,进而延伸至第二箱体13的外部,使第二滑动杆22恢复至初始状态,如图6所示;
41.第一滑动杆9和第一滑动板16的复位,启动第四电动推杆18,第四电动推杆18的活塞杆带动第一滑动板16竖直向上移动,第一滑动板16带动第一滑动杆9竖直向下移动,进而使得第一滑动杆9的顶部与第一通孔7的顶部内壁相抵触,启动第三电动推杆15,第三电动推杆15的活塞杆带动第一滑动杆9横向移动,第一滑动杆9带动第一挡板10横向移动,使得第一挡板10的一侧与第一箱体12的一侧内壁相抵触,第二箱体13和第一箱体12不会发生移动,完成对第一滑动杆9与第一滑动板16的复位,如图1所示;
42.进而装置便可重复上述步骤完成上楼过程,安装在装置四周的摄像头3用来识别四周的障碍物,控制装置的行进方向实现避障功能,在此过程中通过摄像头3对环境的建模以及gps对走过的路线进行记录,以便返回时实现自动返回,最后通过扫码实现装置的开锁上锁,并且通过手机app上的遥控行走功能或者语音控制行走功能,方便使用者可以将物资放置到想要放置的位置。
43.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。