1.本实用新型涉及探测机器人技术领域,更具体地说,它涉及基于电子扫描阵列雷达的四足桥梁探测机器人。
背景技术:
2.电子扫描阵列雷达是指雷达天线利用改变天线表面的阵列发出的波束的合成,以达到改变波束扫描方向或者是角度的设计。这种设计有别于机械扫描的雷达天线,可以减少或者是删除驱动雷达天线以达到涵盖较大侦测范围的目的。
3.如中国文献公开的一种四足机器人(申请号:202010911431.9) 虽然解决了四足机器人灵活性底的问题但的四足机器人行走时多为单一的行走方式加剧了对四足的磨损,降低了四足桥梁探测机器人的使用寿命,其次在进行使用电子扫描阵列雷达是一般是把电子扫描阵列雷达裸露在外使电子扫描阵列雷达容易受到损坏,大大降低了电子扫描阵列雷达的使用寿命。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供基于电子扫描阵列雷达的四足桥梁探测机器人,首先通过第一固定块内部的电机带动圆柱齿轮旋转,圆柱齿轮带动啮合连接的半圆柱齿轮旋转,半圆柱齿轮旋转从而带动第一连杆转动,第一连杆转动通过转轴可以带动第二连杆转动,第二连杆的转动从而可以实现第一滑轮的升降,从而实现四足运动时使用高度的变化,当进行装置的拖运时便可以通过第一电机驱动带动连杆的运作使四足收起,使用第二滑轮完成拖运不仅可以加快装置的移动还可以对四足以及第一滑轮进行保护减少磨损,增加机器人四足的使用寿命,同时通过第二电机的运作可以带动螺纹块的旋转,螺纹块在螺纹槽内旋转从而带动第二固定块在限位孔内滑动,在电子扫描雷达在不使用时便可以通过该方式使电子扫描雷达回收到限位孔内对电子扫描雷达进行保护,防止电子扫描雷达受到损坏。
5.为实现上述目的,本实用新型提供了如下技术方案:
6.基于电子扫描阵列雷达的四足桥梁探测机器人,包括壳体,所述壳体外部四周均固定连接有第一固定块,所述第一固定块的内部均设置有限位槽,所述限位槽的内部后端均固定连接有第一电机,所述第一电机的输出端均固定连接有圆柱齿轮,所述圆柱齿轮均啮合连接有半圆柱齿轮,所述半圆柱齿轮均通过转轴转动连接有第一连杆,所述第一连杆的下端均通过转轴转动连接有第二连杆,所述第二连杆的下端均固定连接有第一滑轮,所述壳体的顶端设置有限位孔,所述限位孔的内部左右两侧均设置有滑槽,所述限位孔的内部下端固定连接有第二电机,所述第二电机的输出端固定连接有联轴器,所述联轴器的顶端固定连接有传动轴,所述传动轴的顶端固定连接有螺纹块,所述限位孔的内部滑动连接有第二固定块,所述第二固定块的下端左右两侧均固定连接有滑块,所述第二固定块的内部设置有螺纹槽,所述螺纹槽的顶端固定连接有连接块,所述连接块的顶端左右两侧均固
定连接有立板,所述立板的内侧均通过阻尼轴转动连接有电子扫描阵列雷达;
7.通过上述技术方案,首先通过第一固定块内部的电机带动圆柱齿轮旋转,圆柱齿轮带动啮合连接的半圆柱齿轮旋转,半圆柱齿轮旋转从而带动第一连杆转动,第一连杆转动通过转轴可以带动第二连杆转动,第二连杆的转动从而可以实现第一滑轮的升降,从而实现四足运动时使用高度的变化,当进行装置的拖运时便可以通过第一电机驱动带动连杆的运作使四足收起,使用第二滑轮完成拖运不仅可以加快装置的移动还可以对四足以及第一滑轮进行保护减少磨损,增加机器人四足的使用寿命,同时通过第二电机的运作可以带动螺纹块的旋转,螺纹块在螺纹槽内旋转从而带动第二固定块在限位孔内滑动,在电子扫描雷达在不使用时便可以通过该方式使电子扫描雷达回收到限位孔内对电子扫描雷达进行保护,防止电子扫描雷达受到损坏。
8.进一步地,所述第一连杆、第二连杆和第一滑轮均相等;
9.通过上述技术方案,从而可以便于装置零件的维修与更换。
10.进一步地,所述壳体的下端四角均固定连接有第二滑轮;
11.通过上述技术方案,使用第二滑轮完成拖运不仅可以加快装置的移动还可以对四足以及第一滑轮进行保护减少磨损,增加机器人四足的使用寿命。
12.进一步地,所述滑块均滑动连接在滑槽的内部;
13.通过上述技术方案,通过滑块在滑槽内的滑动从而可以到达第二固定块能够在限位孔的内部稳定的升降。
14.进一步地,所述螺纹块与螺纹槽螺纹连接;
15.通过上述技术方案,通过螺纹块在螺纹槽的转动从而可以达到使第二固定块在限位孔的内部的升降。
16.进一步地,所述壳体的左侧固定连接有防撞块;
17.通过上述技术方案,通过防撞块可以减少壳体被损伤的风险。
18.进一步地,所述立板的大小与限位孔的大小相等;
19.通过上述技术方案,从而可以保证电子扫描阵列雷达可以回收至限位孔内。
20.综上所述,本实用新型具有以下有益效果:
21.1、通过第一固定块内部的电机带动圆柱齿轮旋转,圆柱齿轮带动啮合连接的半圆柱齿轮旋转,半圆柱齿轮旋转从而带动第一连杆转动,第一连杆转动通过转轴可以带动第二连杆转动,第二连杆的转动从而可以实现第一滑轮的升降,从而实现四足运动时使用高度的变化,当进行装置的拖运时便可以通过第一电机驱动带动连杆的运作使四足收起,使用第二滑轮完成拖运不仅可以加快装置的移动还可以对四足以及第一滑轮进行保护减少磨损,增加机器人四足的使用寿命。
22.2、通过第二电机的运作可以带动螺纹块的旋转,螺纹块在螺纹槽内旋转从而带动第二固定块在限位孔内滑动,在电子扫描雷达在不使用时便可以通过该方式使电子扫描雷达回收到限位孔内对电子扫描雷达进行保护,防止电子扫描雷达受到损坏。
附图说明
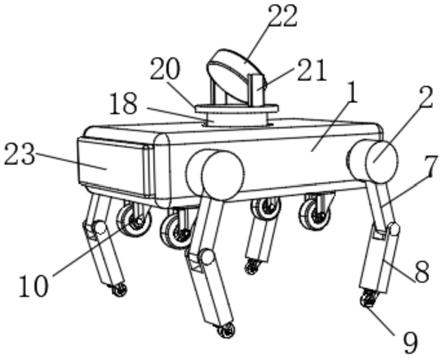
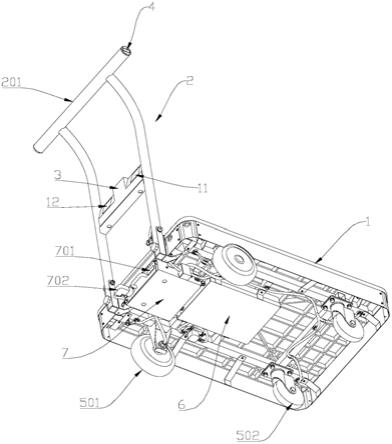
23.图1为本实用新型结构的立体结构示意图;
24.图2为本实用新型结构的正视结构剖视图;
25.图3为本实用新型结构的第一固定块结构示意图;
26.图4为本实用新型结构的限位孔结构示意图。
27.图中:1、壳体;2、第一固定块;3、限位槽;4、第一电机;5、圆柱齿轮;6、半圆柱齿轮;7、第一连杆;8、第二连杆;9、第一滑轮;10、第二滑轮;11、限位孔;12、滑槽;13、第二电机;14、联轴器;15、传动轴;16、螺纹块;17、第二固定块;18、滑块;19、螺纹槽;20、连接块;21、立板;22、电子扫描阵列雷达;23、防撞块。
具体实施方式
28.实施例:
29.以下结合附图1
‑
4对本实用新型作进一步详细说明。
30.基于电子扫描阵列雷达的四足桥梁探测机器人,如图1
‑
4所示,包括壳体1,壳体1外部四周均固定连接有第一固定块2,第一固定块2的内部均设置有限位槽3,限位槽3的内部后端均固定连接有第一电机4,第一电机4的输出端均固定连接有圆柱齿轮5,圆柱齿轮5 均啮合连接有半圆柱齿轮6,半圆柱齿轮6均通过转轴转动连接有第一连杆7,第一连杆7的下端均通过转轴转动连接有第二连杆8,第二连杆8的下端均固定连接有第一滑轮9,壳体1的顶端设置有限位孔11,限位孔11的内部左右两侧均设置有滑槽12,限位孔11的内部下端固定连接有第二电机13,第二电机13的输出端固定连接有联轴器14,联轴器14的顶端固定连接有传动轴15,传动轴15的顶端固定连接有螺纹块16,限位孔11的内部滑动连接有第二固定块17,第二固定块17的下端左右两侧均固定连接有滑块18,第二固定块17 的内部设置有螺纹槽19,螺纹槽19的顶端固定连接有连接块20,连接块20的顶端左右两侧均固定连接有立板21,立板21的内侧均通过阻尼轴转动连接有电子扫描阵列雷达22;通过上述技术方案,首先通过第一固定块2内部的电机4带动圆柱齿轮5旋转,圆柱齿轮5 带动啮合连接的半圆柱齿轮6旋转,半圆柱齿轮6旋转从而带动第一连杆7转动,第一连杆7转动通过转轴可以带动第二连杆8转动,第二连杆8的转动从而可以实现第一滑轮9的升降,从而实现四足运动时使用高度的变化,当进行装置的拖运时便可以通过第一电机4驱动带动连杆的运作使四足收起,使用第二滑轮10完成拖运不仅可以加快装置的移动还可以对四足以及第一滑轮9进行保护减少磨损,增加机器人四足的使用寿命,同时通过第二电机13的运作可以带动螺纹块16的旋转,螺纹块16在螺纹槽19内旋转从而带动第二固定块17 在限位孔11内滑动,在电子扫描雷达22在不使用时便可以通过该方式使电子扫描雷达22回收到限位孔11内对电子扫描雷达22进行保护,防止电子扫描雷达22受到损坏。
31.如图1
‑
2所示,第一连杆7、第二连杆8和第一滑轮9均相等;通过上述技术方案,从而可以便于装置零件的维修与更换。
32.如图1
‑
2所示,壳体1的下端四角均固定连接有第二滑轮10;通过上述技术方案,使用第二滑轮10完成拖运不仅可以加快装置的移动还可以对四足以及第一滑轮9进行保护减少磨损,增加机器人四足的使用寿命。
33.如图1
‑
1所示,滑块18均滑动连接在滑槽12的内部;通过上述技术方案,通过滑块18在滑槽12内的滑动从而可以到达第二固定块 17能够在限位孔11的内部稳定的升降。
34.如图4所示,螺纹块16与螺纹槽19螺纹连接;通过上述技术方案,通过螺纹块16在螺纹槽19的转动从而可以达到使第二固定块17 在限位孔11的内部的升降。
35.如图1所示,壳体1的左侧固定连接有防撞块23;通过上述技术方案,通过防撞块23可以减少壳体1被损伤的风险。
36.如图4所示,立板21的大小与限位孔11的大小相等;通过上述技术方案,从而可以保证电子扫描阵列雷达22可以回收至限位孔11 内。
37.工作原理:首先通过第一固定块2内部的电机4带动圆柱齿轮5 旋转,圆柱齿轮5带动啮合连接的半圆柱齿轮6旋转,半圆柱齿轮6 旋转从而带动第一连杆7转动,第一连杆7转动通过转轴可以带动第二连杆8转动,第二连杆8的转动从而可以实现第一滑轮9的升降,从而实现四足运动时使用高度的变化,当进行装置的拖运时便可以通过第一电机4驱动带动连杆的运作使四足收起,使用第二滑轮10完成拖运不仅可以加快装置的移动还可以对四足以及第一滑轮9进行保护减少磨损,增加机器人四足的使用寿命,同时通过第二电机13 的运作可以带动螺纹块16的旋转,螺纹块16在螺纹槽19内旋转从而带动第二固定块17在限位孔11内滑动,在电子扫描雷达22在不使用时便可以通过该方式使电子扫描雷达22回收到限位孔11内对电子扫描雷达22进行保护,防止电子扫描雷达22受到损坏。
38.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。