1.本实用新型涉及一种管道修复机器人主作业器,尤其涉及非开挖管道修复技术领域。
背景技术:
2.城市管道尤其是地下排水管道需要不断的维修、更新,目前出现了许多相关的新技术,如翻转内衬技术、紫外线光固化技术等,这些技术提高了地下排水管道的养护水平。但这些技术的局限性也很明显:如遇到中小管道阻断性损坏(管道不通)如:塌陷、破损、断裂等情况,需要管道更新时,就无法进行非开挖式管道更新,尤其是当管道材料为塑料(hdpe)管时只能进行开挖维修,维修麻烦,费工费时,且对路面损坏大。
技术实现要素:
3.针对现有技术中存在的上述缺陷,本实用新型提供了一种管道修复机器人主作业器,利用其能够在非开挖情况下对待修管道进行切割,便于实现非开挖形式管道更新。
4.本实用新型是通过如下技术方案来实现的:一种管道修复机器人主作业器,其特征是:包括主作业器主体,所述主作业器主体包括截面呈u形的主体构件、至少一个滑块组、第一油缸、作业动件,主体构件的前端设置有前座,主体构件的后端设置有后座,所述滑块组和所述第一油缸均设置在所述主体构件的内腔内,所述滑块组通过所述第一油缸驱动移动,所述滑块组包括通过斜面滑动配合的下滑块和上滑块,所述作业动件上下可动地设置在所述主体构件的内腔内并位于所述滑块组的上部,所述作业动件与所述滑块组的上滑块连接,所述作业动件的上部设置有第二油缸、滑座、破碎刀具,第二油缸固定在所述作业动件上部,所述滑座可动地与所述第二油缸连接,所述破碎刀具连接在所述滑座上部。
5.本实用新型中,通过第一油缸可驱动滑块组进行移动,由于滑块组中的上滑块和下滑块通过斜面滑动配合,当滑块组移动时,上滑块可带动与其连接的作业动件向上抬起或下移。通过第二油缸可推动滑座运动并带动破碎刀具进行往复运动。当作业动件上抬后,通过第二油缸带动破碎刀具做往复运动可将待更换的管道的管壁切开。利用本实用新型进行管道更新时,本实用新型后端可连接液压胀管器、拖带器等设备,利用本实用新型将待修管道切割后,可通过后续的液压胀管器对管道进行破碎,然后利用拖带器将新管道拖入进行管道更新。
6.进一步的,所述主作业器主体前端连接有导向模块,所述导向模块的前端截面尺寸小于其后端截面尺寸。主作业器在前进时通过其前端设置的导向模块,可顺利通过前方管道因塌陷等而形成的狭窄位置,从而引导主作业器在管道内顺利前进。
7.进一步的,所述导向模块上设置有照明器。通过设置照明器,可为可视化设备提供照明。
8.进一步的,所述导向模块上安装有滚轮。通过滚轮可便于主作业器顺利前进。
9.进一步的,为保证作业动件稳定升降,所述滑块组为两个,两个滑块组的下滑块通
过连杆相连接。
10.进一步的,主体构件的内腔底部设置有第一导轨,所述滑块组的下滑块滑动设置在所述第一导轨上。下滑块可沿第一导轨进行移动,保证滑块组工作可靠性。
11.进一步的,为保证作业动件升降时的可靠性,所述作业动件通过第二导轨与所述主体构件的内侧配合。
12.进一步的,所述作业动件的上部为弧形面。作业动件的上部设置为弧形面,可与管道壁配合,便于对管道壁支撑。
13.进一步的,所述导向模块内设置有可动的推杆,所述推杆的后端穿过所述前座与主体构件内腔中的滑块组的下滑块连接,所述推杆的前端设置有倾斜设置的推板。第一油缸驱动滑块组向前移动时,同时推动推杆向前移动,推杆在向前移动时通过其前端倾斜设置的推板可将前方塌陷的管壁分离、托起,便于主作业器在管道内前进。
14.进一步的,为保证推杆动作时的可靠性,所述导向模块内在所述推杆的上部设置有上限位板,在所述推杆的下部设置有下限位板。
15.本实用新型的有益效果是:本实用新型结构设计合理,使用方便,在非开挖条件下,通过第一油缸带动作业动件上抬后,利用作业动件上部设置的可往复运动的破碎刀具可实现对管道的切割,可对需要更换的管道先进行切割,后续可利用胀管器、拖带器等修复设备等对旧管道进行破碎、将新管道拖入更新。通过在主作业器前端设置导向模块,可在主作业器前进时能顺利通过前方管道因塌陷等而形成的狭窄位置,从而引导主作业器在管道内顺利前进。通过在主作业器前部设置推杆,推杆在随滑块组向前移动时可通过其前端倾斜设置的推板可将前方塌陷的管壁分离、托起,该结构的实用新型,既可以利用待维修管道两端的检查井配合非开挖的其它设备在非开挖情况下进行作业,也可以在管道不通的情况下,利用单侧检查井配合非开挖的其它设备进行作业。本实用新型结构设计合理,使用方便,可与其他管道修复设备(例如胀管器、整形器、拖带器等)组合使用,从而实现管道更新。
附图说明
16.图1是具体实施方式中管道修复机器人的结构示意图;
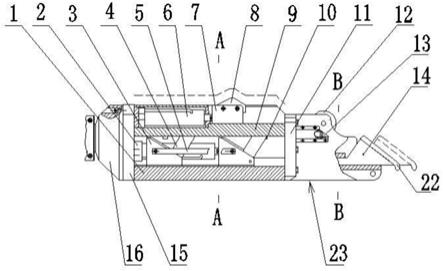
17.图2是图1中的主作业器的放大示意图;
18.图3是图1中的a
‑
a剖视示意图;
19.图4是主作业器中的作业动件位于下位时的示意图;
20.图5是主作业器中的作业动件位于上位时的示意图;
21.图6是图1中的b
‑
b示意图;
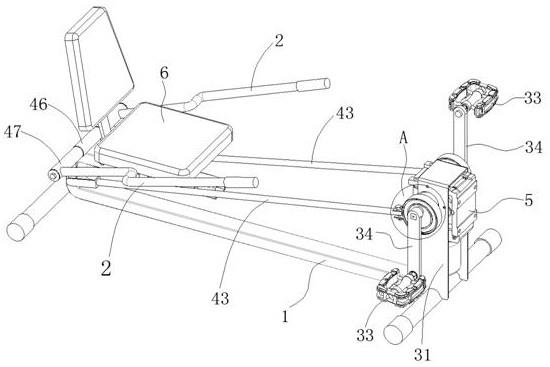
22.图7是具体实施方式中管道修复机器人作业时的示意图;
23.图中,1、主体构件,2、第一油缸,3、下滑块,4、上滑块,5、连杆,6、第二油缸,7、滑座,8、破碎刀具,9、作业动件,10、第二导轨,11、前座,12、滚轮,13、照明器,14、推杆,15、后座,16、连接座,17、连接套,18、器材仓,19、照明器,20、浮动连接器,21、液压胀管器,22、推板,23、导向模块,231、立板,24、第一导轨,25、上限位板,26、下限位板,27、检查井ⅰ,28、检查井ⅱ,29、提升机,30、拉链,31、主作业器,32、顶杆,33、顶盘,34、组合式后背顶机。
具体实施方式
24.下面通过非限定性的实施例并结合附图对本实用新型作进一步的说明:
25.如附图所示,一种管道修复机器人主作业器,其包括主作业器主体,所述主作业器主体包括主体构件1、至少一个滑块组、第一油缸2、作业动件9。主体构件1为截面u形的结构件,主体构件1的前端设置有前座11,主体构件1的后端设置有后座15。所述滑块组和所述第一油缸2均设置在所述主体构件1的内腔内,所述滑块组通过所述第一油缸2驱动移动。本实施例中,所述滑块组为两个,两个滑块组的下滑块3通过连杆5相连接。在主体构件1的内腔底部沿其长度方向设置有第一导轨24,所述滑块组的下滑块3滑动设置在第一导轨24上。所述滑块组包括通过斜面滑动配合的下滑块3和上滑块4,第一油缸2设置在后座15和后端的滑块组之间,第一油缸2与滑块组的下滑块连接。所述作业动件9上下可动地设置在所述主体构件1的内腔内并位于所述滑块组的上部,所述作业动件9与所述滑块组的上滑块4连接,上滑块4沿下滑块的斜面移动时,可带动作业动件9抬起或下降。为保证作业动件的升降动作可靠,本实施例中优选的是,在主体构件1的内侧沿作业动件的升降方向设置有第二导轨10,作业动件9与第二导轨10滑动配合。在所述作业动件9的上部设置有第二油缸6、滑座7、破碎刀具8,第二油缸6固定在所述作业动件9上部,滑座7可动地设置在第二油缸6前端,滑座7与第二油缸6的活塞杆连接,所述破碎刀具8连接在所述滑座7上部,通过第二油缸6可带动滑座7及破碎刀具8进行往复运动。
26.为便于引导主作业器在管道内顺利前进,本实用新型优选的是,在所述主作业器主体前端连接有导向模块23,所述导向模块23的前端截面尺寸小于其后端截面尺寸。本实施例中,导向模块23包括两块平行设置的立板231,两块立板231连接在前座11的前端。由于导向模块23的前端截面尺寸小于其后端截面尺寸,主作业器在前进时通过导向模块可顺利通过前方管道因塌陷等而形成的狭窄位置,从而引导主作业器在管道内顺利前进。
27.同样,为便于主作业器在管道内顺利前进,本实用新型优选的是,所述导向模块23上安装有滚轮12。
28.为便于照明,本实用新型优选的是,在所述导向模块23上设置有照明器13。通过设置照明器13,可为可视化设备提供照明,可实现可视化条件下作业。
29.为便于与管道壁配合,本实用新型优选的是,所述作业动件9的上部为弧形面。
30.为便于主作业器在管道内前进,本实用新型优选在所述导向模块23内设置可动的推杆14,所述推杆14的后端穿过所述前座11与主体构件1内腔中的滑块组的下滑块3连接,所述推杆14的前端设置有倾斜设置的推板22。推杆14可在滑块组的下滑块顶推作用下向前移动,从而可将前方塌陷的管壁分离、托起,便于主作业器在管道内前进。为保证推杆14动作可靠性,优选在所述导向模块23内在所述推杆14的上部设置有上限位板25,在所述推杆14的下部设置有下限位板26,上限位板25和下限位板26均与两侧的立板231固定连接,通过上限位板25和下限位板26可对推杆14进行限位。
31.利用本实用新型进行管道维修作业时,本实用新型可与其他管道修复设备(例如液压胀管器、整形器、拖带器等)组合使用形成管道修复机器人。
32.如附图7所示,是利用本实用新型进行管道更新时作业示意图。进行管道更新时,在待更新管道的前后两端的检查井28和检查井27内分别设置提升机29和组合式后背顶机34,主作业器31后端依次连接作业器材仓18、液压胀管器21、新管及内部顶杆32、顶盘33等
组成管道修复机器人作业器材组,提升机29通过拉链30与主作业器31前端连接。管道机器人在前面提升机29的牵引及后面组合式后背顶机34的推动下在待更新管道内前进。当需要对管道进行切割时,主作业器31中的滑块组在第一油缸2的作用下向前移动,上滑块4带动与其连接的作业动件9向上移动,作业动件9向上抬起,此时第二油缸6动作,推动滑座7运动,滑座7带动破碎刀具8进行往复运动,将管壁切开。完成切割作业后,第二油缸6回程,带动破碎刀具8回位,第一油缸2回程,带动滑块组的下滑块3回位,滑块组的上滑块4下移带动作业动件9向下运动,完成切割动作。管道修复机器人继续前进,通过液压胀管器21将待更新管道胀碎,将旧管道空间胀大并逐渐拖入新管,完成对管道的更新。上述实施例是在待更新管道未完全阻断、可以利用提升机对管道修复机器人进行牵引的情况下进行的作业。此种情况下,主作业器前端可不设置导向模块23和推杆14,或仅设置导向模块23,或同时设置导向模块23和推杆14。当主作业器前端设置有导向模块23和推杆14时,主作业器前端的推杆14在滑块组的下滑块3向前移动时被顶推向前,通过推杆14可将前方塌陷的管壁分离、托起,便于主作业器在管道内前进。当待更新管道因塌陷等原因被完全阻断时,此时无法利用提升机对管道修复机器人进行牵引,此时管道修复机器人可通过设置在后面检查井内的后背顶机34的推动在待更新管道内前进,此种情况下管道修复机器人的主作业器31前端设置有导向模块23和推杆14,通过第一油缸2为推杆14提供推力,通过推杆14将前方塌陷的管壁分离、托起,便于主作业器在管道内前进,从而可实现只用单侧检查井就能对管道缺陷部位进行修复施工。
33.本实施例中所述的液压胀管器、器材仓、拖带器、提升机、组合式后背顶机等均为现有技术,在此不再赘述。
34.本实施例中的其他部分均为现有技术,在此不再赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。