1.本发明属于农业机械领域,具体涉及一种方捆机压缩力、草捆规则率控制机构及控制方法。
背景技术:
2.草捆密度是方捆机重要技术与性能指标之一,为调整草捆密度,方捆机均设有密度调节装置。现有密度调节装置均采用与弹簧或液压缸连接的侧板夹紧已经形成的草捆,为后续草捆压缩提供压缩力,所以通过改变弹簧或液压缸对侧板的夹紧程度就能改变压缩力、草捆密度。草捆规则率也是打捆机重要性能指标,规则草捆既美观又便于堆垛与运输,降低运输成本。
3.但现有产品结构、控制方法等存在一系列问题,主要为:1、夹紧程度由弹簧或液压缸行程决定,一种作物同一含水率、行程时压缩力相同,但因草条中含水率分布不均匀及其他因素,导致同一行程时最大压缩力会发生变化,因而整机作业存在风险(如最大压缩力不同产生的冲击、最大压缩力导致的静强度不足等)。2、现有密度调节装置无法根据已经形成的不规则草捆自动控制后续的草捆分布规律,达到控制草捆规则率的目的。
技术实现要素:
4.本发明的目的之一在于提供一种方捆机压缩力、草捆规则率控制机构,使之应用于方捆机上,可以提升方捆机的草捆规则率,从而便于堆垛与运输,以降低运输成本。
5.本发明的目的之一通过以下方案来实现:一种方捆机压缩力、草捆规则率控制机构,包括由四根固定纵梁围成的框架,在框架的四个侧面分别设置有顶侧加压板、底侧固定板、左侧加压板和右侧加压板,顶侧加压板、底侧固定板、左侧加压板和右侧加压板和四根固定纵梁围成两端贯通的加压密度室,所述底侧固定板固定在机架上,顶侧加压板、左侧加压板和右侧加压板同一端均通过转轴转动式安装在机架上,并可在密度调节机构带动下进行转动,其中所述顶侧加压板可在竖直面转动,左侧加压板和右侧加压板可在水平面转动。
6.作为优选方案,所述密度调节机构对称设置在框架两侧,包括密度调节油缸、第一控制臂和第二控制臂,所述第一控制臂对接在密度调节油缸的上端,第二控制臂对接在密度调节油缸的下端,第一控制臂和第二控制臂均可与所述密度调节油缸的连接处转动。
7.作为优选方案,所述第一控制臂和第二控制臂均包括短臂ⅰ和短臂ⅱ,短臂ⅰ和短臂ⅱ连接处形成有折角,其中短臂ⅰ端部与密度调节油缸转动式连接,短臂ⅱ端部可与对应的左侧加压板或右侧加压板端面接触。
8.作为优选方案,所述第二控制臂的折角处形成固定旋转头,该固定旋转头转动式安装在机架上,所述第一控制臂的折角处与顶侧加压板两侧接头转动式连接。
9.作为优选方案,所述加压密度室进口一端设置有曲柄滑块压缩机构,所述曲柄滑块压缩机构包括活塞和用于驱动活塞在加压密度室内往复运动的曲柄摇杆机构。
10.作为优选方案,所述曲柄摇杆机构包括三个连接销轴,在三个连接销轴任一点处设置有力传感器,用于检测该处的最大受力值,并将最大受力值发送给控制器,以判断最大受力值与阈值的关系,从而调整密度调节油缸进行动作。
11.作为优选方案,所述密度调节机构还包括液压控制系统,液压控制系统包括密度调节油缸、电磁换向阀、溢流阀和油箱,所述电磁换向阀与两个密度调节油缸的进油口和出油口分别连接;当电磁换向阀左位得电时,密度调节油缸伸出;当电磁换向阀右位得电时,密度调节油缸缩回;不得电时,电磁换向阀处于中位,密度调节油缸进行保压,电磁换向阀还与溢流阀连接,液压油通过溢流阀溢回油箱。
12.本发明的目的之二采用如下方案实现:一种方捆机压缩力、草捆规则率控制方法,具体方法如下:步骤一、通过曲柄滑块压缩机构对物料进行压缩,在此之前形成的草捆充当本次压缩时的压缩堵头,提供压缩阻力;步骤二、密度调节油缸控制顶侧加压板、左侧加压板和右侧加压板放松或夹紧前工作循环形成的草捆,改变本次喂入物料压缩时的压缩阻力,进而改变草捆密度;步骤三、曲柄滑块压缩机构压缩物料时,随之产生压缩阻力作用于活塞上,可通过测量曲柄摇杆机构任一点销轴上的最大受力值,判断最大压缩阻力是否超出阈值并作出相应控制。
13.作为优选方案,所述步骤三中,设于i/j/k任一点销轴上的力传感器实时读取当前最大压缩阻力,并与阈值求差对比,根据其差值与阈值进行对比,控制器控制密度调节油缸对加压密度室内的物料的夹紧力进行调整,从而实现对压缩阻力的调整。
14.作为优选方案,还包括步骤四:用户可通过控制终端手动输入压缩阻力的阈值,控制程序自动根据用户输入的阈值为目标,以当前检测到的压缩阻力与阈值偏差为对象,控制液压系统改变夹紧程度,最终使得压缩阻力达到阈值附近,进而达到对应的草捆密度值。
15.有益效果其一、本发明与现有技术(通过控制系统维持密度油缸缸压力恒定)相比,具有以下效果:(a)、稳定最大连杆压缩力;(b)、实现草捆规则率控制。上述两点会产生密度均匀一致、形状规则的草捆,同时最大压缩阻力恒定可有效减少冲击,提高疲劳寿命并防止瞬时过载产生的机械故障。
16.其二、顶侧加压板、左侧加压板和右侧加压板同一端均通过转轴转动式安装在机架上,底侧固定板固定在机架上,上述三侧的加压板通过密度调节机构调整转动,进而可以通过上述三侧的加压板对物料的夹紧力进行调整,从而提高或降低活塞的压缩阻力,根据加压密度室内物料实际情况调节草捆密度,以制作出密度均匀一致、形状规则的草捆。
17.其三、优选方案中,设置有液压控制系统,所述液压控制系统为电控系统,与上述机械结构进行配合,可进一步提升响应速度、控制精度并降低能耗(电液系统动作时功耗约2.5kw,机械机构小范围调整功耗很小)。
18.其四、本方案,还提供一种方捆机压缩力、草捆规则率控制方法,考虑到本次喂入的物料被压缩之前,已经在密度室中被压缩的物料存在不规则情况,压缩机构的活塞压缩本次喂入物料时,物料会优先向阻力较小的两侧面流动,补充原先缺失的部分,随着物料补充的进行,逐渐充满整个密度室。即机械机构根据y、z两个方向的阻力分布控制物料在密度
室的流动规律,实现主动干预控制草捆规则率的目的。
19.其五、优选方案中,用户可通过控制终端手动输入压缩力的阈值,根据需要输入不同阈值进而得到不同的草捆密度,从而实现密度调节功能。
附图说明
20.为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
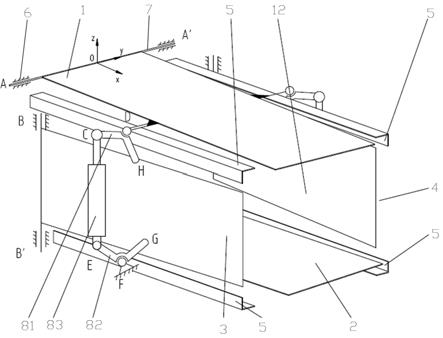
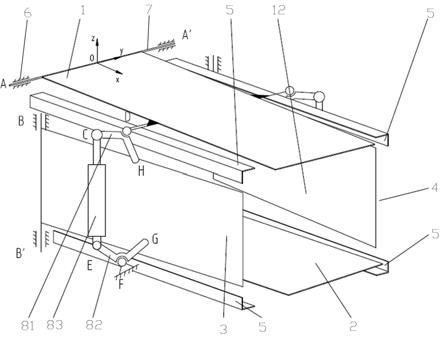
21.图1为本发明中控制机构的机械结构图;图2为本发明液压控制系统的原理图;图3为本发明中控制机构的控制原理总图;图4为本发明中控制方法流程图;图5为本发明中加压密度室的受力分析图。
22.图中标记:1、顶侧加压板,2、底侧固定板,3、左侧加压板,4、右侧加压板,5、固定纵梁,6、机架,7、转轴,8、密度调节机构,81、第一控制臂,82、第二控制臂,83、密度调节油缸,9、曲柄滑块压缩机构,91、活塞,92、曲柄摇杆机构,10、电磁换向阀,11、溢流阀,12、加压密度室,13、前工作循环形成的草捆,14、本次喂入的物料。
具体实施方式
23.以下通过示例性的实施方式对本发明进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益的结合到其它实施方式中。
24.需要说明的是:除非另做定义,本文所使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明专利申请说明书以及权利要求书中所使用的“一个”、“一”或者“该”等类似词语不表述数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,但并不排除其他具有相同功能的元件或者物件。
25.图1所示实施例中,方捆机压缩力、草捆规则率控制机构,包括由四根固定纵梁5围成的框架,固定纵梁5为直角角铁,且直角向内设置,以形成长方体空间轮廓,在框架的四个侧面分别设置有顶侧加压板1、底侧固定板2、左侧加压板3和右侧加压板4,固定纵梁5、顶侧加压板1、底侧固定板2、左侧加压板3和右侧加压板4围成的空间为加压密度室12。需要说明的是,右侧加压板4处的密度调节油缸83和控制臂与左侧加压板3处的密度调节油缸83和控制臂关于xoz平面对称,因此图中未示出。
26.详细地,四块侧板和四根固定纵梁5围成两端贯通加压密度室12,其中固定纵梁5设置四个边角处。底侧固定板2固定在机架6上,顶侧加压板1、左侧加压板3和右侧加压板4同一端均通过转轴7转动式安装在机架6上,顶侧加压板1可在在密度调节机构8带动下竖直面转动,左侧加压板3和右侧加压板4可在在密度调节机构8带动下水平面转动。
27.本实施例中,密度调节机构8为液压装置,对称设置在加压密度室12外部两侧,用于对顶侧加压板1、左侧加压板3和右侧加压板4的绕其转轴7进行转动调整,第一、二控制臂81、82与左侧、右侧加压板3、4不连接,但是密度室充满草捆时,草捆作用于左侧加压板3或右侧加压板4的力基本沿垂直侧板的方向,该力会使第一、二控制臂81、82的自由端与左、右侧加压板3、4分别接触,顶侧加压板1的两侧也与第一、二控制臂81、82连接,同样可以通过液压装置进行转动调节。
28.密度调节机构8的具体结构如下:密度调节油缸83的上端与第一控制臂81的一端转动式连接,密度调节油缸83的下端与第二控制臂82的一端转动式连接,第一控制臂81和第二控制臂82均可绕其连接处转动。其中第一控制臂81和第二控制臂82均由短臂ⅰ和短臂ⅱ组成,短臂ⅰ和短臂ⅱ连接处形成有折角,其中短臂ⅰ与密度调节油缸83转动式连接,短臂ⅱ可与对应的左侧加压板3或右侧加压板4端面接触。第二控制臂82的折角处形成固定旋转头,该固定旋转头转动式安装在机架6上,第一控制臂81的折角处与顶侧加压板1两侧转动式连接。
29.本实施例中,如图1所示,顶侧加压板1绕aa’轴旋转, aa’轴安装于机架6上,其上的d点与第一控制臂81铰接。密度调节油缸83一端c点与第一控制臂81一端铰接,密度调节油缸83的另一端e点与第二控制臂82铰接。第二控制臂82固定旋转点f点固定于机架上。左侧加压板3绕bb’轴旋转(bb’轴固定于机架上)。第一、二控制臂81、82的端部与左侧加压板3不连接,但是密度室充满草捆时,草捆作用于左侧加压板3基本沿y方向,该力会使端部h/g与左侧加压板3或右侧加压板4分别接触。
30.如图2所示,本方案设计了一种机电液自动控制系统,用于对上述控制机构的机械机构进行控制,该控制系统包括密度调节油缸83、电磁换向阀10、溢流阀11、油箱及略去的液压动力源。当电磁换向阀10左位得电时,密度调节油缸83伸出;当电磁换向阀10右位得电时,密度调节油缸83缩回;不得电时,电磁换向阀10处于中位,密度调节油缸83保压,液压油通过溢流阀11溢回油箱。
31.如图3所示实施例中,曲柄滑块压缩机构9作用是对物料进行压缩,其设置在加压密度室12的进口处,曲柄滑块压缩机构9包括活塞91和曲柄摇杆机构92,其中曲柄摇杆机构92用于驱动活塞91在加压密度室12内往复运动,打捆机的曲柄滑块压缩机构9对物料进行压缩,在此之前形成的草捆充当本次压缩时的压缩堵头,也即前工作循环形成的草捆13提供压缩阻力。液压装置的密度调节油缸83控制机械机构的顶侧加压板1、左侧加压板3和右侧加压板4放松或夹紧此之前形成的草捆,改变本次喂入物料14压缩时的压缩阻力,进而改变草捆密度。曲柄摇杆机构92压缩物料时,随之产生压缩阻力作用于活塞91上,可通过测量i/j/k任一点销轴上的最大力(kn)判断最大压缩阻力是否超出阈值并作出相应控制。
32.控制器根据可设于i/j/k任一点销轴上的力传感器,实时读取当前最大压力(kn)并与阈值求差对比,若其偏差小于设定值(人为规定的值,如阈值5%),认为当前压缩阻力与阈值相同,控制器发出指令电磁换向阀10不得电,电磁换向阀10处于中位保压,密度调节油缸83行程固定、各个加压板的位置也固定。若偏差大于设定值且为正值,说明当前压缩阻力大于阈值,控制器发出指令电磁换向阀10左位得电,密度调节油缸83伸长,机械机构的侧板对物料的夹紧变小,降低压缩阻力,直至降至阈值附近。若偏差大于设定值且为负值,说明当前压缩阻力小于阈值,控制器发出指令电磁换向阀10右位得电,密度调节油缸83缩短,机
械机构的侧板对物料的夹紧变大,提高压缩阻力,直至升至阈值附近。
33.本实施例中,机械装置也可独自在小范围内稳定压缩阻力,原理如下文。如图5所示,对夹在加压密度室12中已经形成的草捆为对象进行受力分析并将各力标注在图中,需要说明的是,各力进行了集中力简化,包括草捆重力g、底板固定板2提供的压力fn、左侧加压板3对草捆的压力fy1、摩擦力ff2、右侧加压板4对草捆的压力fy2、摩擦力ff3、顶侧加压板1对草捆的压力fz、摩擦力ff1、草捆受到的压缩阻力fx。根据受力平衡,可得如下方程组:fn=g fzfy1=fy2=fyfx
‑
2ffy
‑
ffz
‑
md2x/dt2=0式中,m为草捆质量、f为物料与侧板的摩擦系数、x为压缩过程中,已形成的草捆沿x方向的位移。
34.根据测算,惯性力md2x/dt2相比fx差异较大,仅为其5
‑
10%左右,可忽略,因此得出最大压缩阻力fx=(2fy fz)f,可见该力与顶侧加压板1、左侧加压板3和右侧加压板4对草捆的压力相关。从另一个角度,fy、fz与草捆被加压板夹紧后的变形量有关,夹紧变形量越大,fy、fz越大。
35.当密度调节油缸83行程固定时(液压装置处于中位),密度调节油缸83在运动学上相当于一连杆。若加压密度室12所夹的草捆顶部有一异物(如大块泥土),会导致fz增大,顶侧加压板1绕y轴逆时针转动,转动后对草捆的z向夹紧程度降低,进而fz降低。同时顶侧加压板1转动会提升d点高度,d点为第一控制臂81旋转支点,所以密度调节油缸83整体上移,第一控制臂81绕d点沿x轴逆时针旋转、第二控制臂82绕f点沿x轴顺时针旋转,两控制臂均使左右侧加压板y向夹紧程度加大,加大fy。左右两加压板配合,力图使上式fx不变,达到维持最大压缩阻力的目的。
36.当然,该机械机构不足以维持fx在大范围内恒定,但与前述电液装置配合使用,可进一步提升响应速度、控制精度并降低能耗(电液系统动作时功耗约2.5kw,机械机构小范围调整功耗很小)。
37.本实施例中,控制草捆规则率原理如下:考虑如下情况,本次喂入的物料被压缩之前,已经在加压密度室12中被压缩的物料存在不规则情况,如y向物料偏少,z向物料偏多。那么左、右侧加压板3、4会向里运动,顶侧加压板1向上运动被迫与草捆接触。虽然左、右侧加压板3、4貌似夹紧物料的变形量较大,但实际大变形量的获得是横向物料缺失导致的,因此实际草捆对侧板的力fy较小。所以压缩机构的活塞91压缩本次喂入的物料时,物料会优先向阻力较小的两侧面流动,补充原先缺失的部分,随着物料补充的进行,fy逐渐加大,物料方减少对侧面的补充,逐渐充满整个加压密度室12。即机械机构根据y、z两个方向的阻力分布控制物料在密度室的流动规律,实现主动干预控制草捆规则率的目的。
38.本实施例中,控制草捆密度原理如下:在相同作物与含水率的条件下,草捆密度与压缩时草捆受到的阻力直接相关,阻力越大、密度越高,反之亦然。当然上述原则是在动力可满足且打捆机机械部分能够承受阻力变大带来的反作用力前提之下。根据这个原则,可以设计密度调节系统,该系统通过前述液压装置控制的机械机构夹紧加压密度室12中上一个工作循环中已形成草捆力度的大小,改变后续草捆开式压缩过程中承受的阻力,进而调节密度的大小,如图3所示。
39.如图4所示,用户可通过控制终端手动输入压缩力的阈值,控制程序自动根据用户输入的阈值为目标,以当前检测到的压缩力与阈值压缩力偏差为对象,控制液压系统改变夹紧程度,最终得到阈值压缩力,进而得到对应的草捆密度值。所以,用户可以根据需要输入不同阈值进而得到不同的草捆密度,实现密度调节功能。
40.本方案,还提供一种方捆机压缩力、草捆规则率控制方法,具体方法如下:步骤一、通过曲柄滑块压缩机构9对物料进行压缩,在此之前形成的草捆充当本次压缩时的压缩堵头,提供压缩阻力;步骤二、密度调节油缸83控制顶侧加压板1、左侧加压板2和右侧加压板4放松或夹紧前工作循环形成的草捆13,改变本次喂入的物料14压缩时的压缩阻力,进而改变草捆密度;步骤三、曲柄滑块压缩机构9压缩物料时,随之产生压缩阻力作用于活塞91上,可通过测量i/j/k任一点销轴上的最大受力值,判断最大压缩阻力是否超出阈值并作出相应控制。根据其差值与阈值进行对比,控制器控制密度调节油缸对加压密度室12内物料的夹紧力进行调整,从而实现对压缩阻力的调整。步骤四、用户可通过控制终端手动输入压缩力的阈值,控制程序自动根据用户输入的阈值为目标,以当前检测到的压缩力与阈值压缩力偏差为对象,控制液压系统改变夹紧程度,最终得到阈值压缩力,进而得到对应的草捆密度值。
41.具体地,上述步骤三中,控制器根据可设于i/j/k任一点销轴上的力传感器实时读取当前最大压力并与阈值求差对比,根据其差值与设定值进行对比,若其偏差小于设定值,控制器发出指令电磁换向阀10不得电,电磁换向阀10处于中位保压,密度调节油缸83行程固定,顶侧加压板1、左侧加压板3和右侧加压板4的位置也固定;若其偏差大于设定值且为正值,控制器发出指令电磁换向阀10左位得电,密度调节油缸83伸长,顶侧加压板1、左侧加压板3和右侧加压板4对物料的夹紧力变小,降低压缩阻力,直至降至阈值附近;若其偏差大于设定值且为负值,控制器发出指令电磁换向阀0右位得电,密度调节油缸83行程缩短,顶侧加压板1、左侧加压板3和右侧加压板4对物料的夹紧力变大,提高压缩阻力,直至升至阈值附近。
42.本方法实现主动干预控制草捆规则率的目的,当被压缩的物料存在不规则情况,压缩机构的活塞压缩本次喂入物料时,物料会优先向阻力较小的两侧面流动,补充原先缺失的部分,随着物料补充的进行,能够使得物料逐渐充满整个密度室。根据需要输入不同阈值进而得到不同的草捆密度,通过控制终端手动输入压缩力的阈值,能够实现草捆的密度调节功能。
43.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。