1.本发明涉及卫浴生产技术领域,尤其是涉及的是一种集成式窑车装车智能垫块码垛系统。
背景技术:
2.瓷质马桶的最后一道工序为烧制成瓷,因为窑车温度上升的速度比马桶温度上升的速度要更快,所以为了防止马桶在烧制的过程中出现开裂和其它一些不良的情况,在马桶底部放置多个泡沫以减少温度差异过大带来的不良影响。目前,放置泡沫都为人工手动操作,这提高了工作的风险,同时降低了生产的效率。
技术实现要素:
3.本发明的其他特征和优点将在随后的说明书中阐述,并且部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书、权利要求书以及其他说明书附图中所特别指出的结构来实现和获得。
4.本发明的目的在于克服上述不足,提供一种集成式窑车装车智能垫块码垛系统。
5.为实现上述目的,本发明的技术解决方案是:
6.一种集成式窑车装车智能垫块码垛系统,包括:
7.一窑车;
8.一垫块摆放台;
9.一垫块切割机,其用于切割并输送出制式垫块;
10.一输送带,其用于输送工件;
11.一第一机械臂,其末端具有多个第一夹具;
12.一第二机械臂,其末端具有一工件托架和多个第二夹具;以及
13.一控制面板,其用于连接和调控上述所有器件;
14.其中,第一机械臂用于将垫块切割机输送出的垫块摆放到垫块摆放台上,第二机械臂用于将垫块摆放台上的垫块摆放在窑车上并将输送带上的工件放在垫块上。
15.优选的,该垫块摆放台或第一机械臂上具有第一感应装置,该第一感应装置用于检测垫块摆放台上垫块的摆放情况。
16.优选的,该第一感应装置包括感应板,感应板具有光电感应器。
17.优选的,该第二机械臂上具有第二感应装置,该第二感应装置用于检测窑车上垫块的摆放情况。
18.优选的,该第二感应装置包括图像采集器,图像采集器用于获取窑车上垫块摆放的实时图像,该实时图像为垫块上尚未摆放工件状态;通过将该实时图像与控制面板预存的标准外观模板进行对比,自动判断垫块摆放位置、数量是否合格;不合格时,或中断设备运行并报警,或补充垫块,或移除该次摆放的垫块并重新获取新的垫块。
19.优选的,该第一机械臂包括依序相接的底座、第一节臂和第二节臂,底座和第一节
臂之间、第一节臂和第二节臂之间均可进行竖向旋转,第二节臂具有可竖向旋转的第三节臂,第三节臂下部具有依序连接的第一伸缩缸、工作状态箱和第一夹具,其中,工作状态箱具有用于显示第一夹具工作状态的指示灯。
20.优选的,该第二机械臂末端具有可竖向旋转的转动节臂,转动节臂一侧具有工件托架,转动节臂另一侧具有可竖向滑动的滑架,滑架上部与转动节臂之间具有第二伸缩缸,第二夹具设于滑架。
21.优选的,该第一夹具为真空吸盘,第二夹具为气动夹爪且气动夹爪上具有防滑装置。
22.优选的,该第一夹具和第二夹具均具有感应垫块的光电感应器。
23.优选的,该输送带上具有若干用于搭载工件的工装板。
24.通过采用上述的技术方案,本发明的有益效果是:
25.1.本发明实现了从半自动化到全自动化的改良;从人工放置到机器人放置不仅提高了生产量,让人机互动变为机器之间的对接,协调性大幅度提高。
26.2.对于泡沫垫块在垫块摆放台自动摆放过程,本发明尽可能的把机器简化,由于泡沫之间的间隔小,所以采用吸盘类夹具,这样不仅美观,简约,而且解决了泡沫表面没有凹坑,在夹取过程中容易脱落,传统夹具用力过大泡沫会有损坏风险等问题,更稳定,更高效,更快捷。
27.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
28.无疑的,本发明的此类目的与其他目的在下文以多种附图与绘图来描述的较佳实施例细节说明后将变为更加显见。
29.为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举一个或数个较佳实施例,并配合所示附图,作详细说明如下。
附图说明
30.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例共同用于解释本发明,并不构成对本发明的限制。
31.在附图中,相同的部件使用相同的附图标记,并且附图是示意性的,并不一定按照实际的比例绘制。
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一个或数个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据此类附图获得其他的附图。
33.图1为本发明结构示意图;
34.图2为本发明第一机械臂结构示意图;
35.图3为本发明感应板结构示意图;
36.图4为本发明第二机械臂正视结构示意图;
37.图5为本发明第二机械臂侧视结构示意图;
38.图6为本发明第二夹具结构示意图;
39.图7为本发明工件托架结构示意图。
40.主要附图标记说明:(1窑车,2垫块摆放台,21感应板,211工艺孔,22光电感应器,3垫块切割机,4输送带,5工装板,6第一机械臂,61底座,62第一节臂,63第二节臂,64第三节臂,65第一伸缩缸,66工作状态箱,67第一夹具,7第二机械臂,71转动节臂,调压阀711,72工件托架,73滑架,74第二夹具,75防滑装置,76滑轨,77第二伸缩缸)。
具体实施方式
41.以下将结合附图及实施例来详细说明本发明的实施方式,借此对本发明如何应用技术手段来解决技术问题,并达成技术效果的实现过程能充分理解并据以实施。同时,在以下说明中,处于解释的目的而阐述了许多具体细节,以提供对本发明实施例的彻底理解。然而,对本领域的技术人员来说显而易见的是,本发明可以不用这里的具体细节或者所描述的特定方式来实施。
42.另外,在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
43.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。但注明直接连接则说明连接地两个主体之间并不通过过渡结构构建连接关系,只通过连接结构相连形成一个整体。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
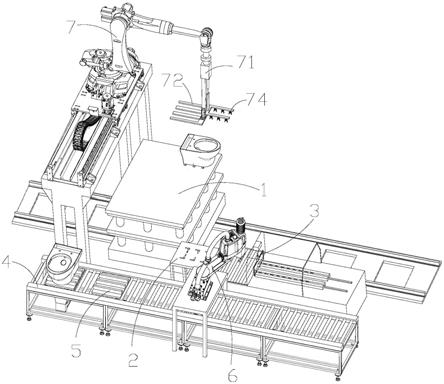
44.如附图1所示,本发明的一种集成式窑车装车智能垫块码垛系统,包括:一窑车1;一垫块摆放台2;一垫块切割机3,其用于切割并输送出制式垫块;一输送带4,其用于输送马桶工件;一第一机械臂6,其末端具有多个第一夹具67;一第二机械臂7,其末端具有一马桶工件托架72和多个第二夹具74;以及一控制面板,其用于连接和调控上述所有器件。
45.其中,第一机械臂6用于将垫块切割机3输送出的垫块摆放到垫块摆放台2上,第二机械臂7用于将垫块摆放台2上的垫块摆放在窑车上并将输送带4上的马桶工件放在垫块上。
46.如附图2
‑
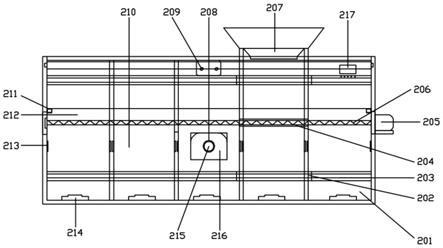
3所示,垫块摆放台2或第一机械臂6上具有第一感应装置,本实施例中第一感应装置设在垫块摆放台2,第一感应装置用于检测垫块摆放台2上垫块的摆放情况。第一感应装置包括感应板21,感应板21具有光电感应器22。两个相对感应板21之间设有工艺孔211。
47.第一机械臂6包括依序相接的底座61、第一节臂62和第二节臂63,底座61和第一节臂62之间、第一节臂62和第二节臂63之间均可进行竖向旋转,第二节臂63具有可竖向旋转的第三节臂64,第三节臂64下部具有依序连接的第一伸缩缸65、工作状态箱66和第一夹具67,其中,工作状态箱66具有用于显示第一夹具67工作状态的指示灯。当机器抓手为空运行状态时,工作状态箱66上的指示灯为绿色。抓取好泡沫垫块时指示灯变为红色。因为点位设
计所以每次吸取泡沫垫块都需要两个为一组,工作状态箱66可以有效避免只拾取到一个导致马桶工件不平衡而摔落的危险情况。
48.其中,第一机械臂6自动摆放是从泡沫垫块切割机3中将已经切好的泡沫垫块进行特定的摆放,方便第二机械臂7抓取。垫块切割机3将人工添加的泡沫原料按预定规格切割,然后第一机械臂6将切好的泡沫垫块取出放在感应板21对应的位置上。由于作业时都是机器相互对接,相互交接时的协调度较高,从而大大降低工作风险。
49.第一机械臂6自动摆放泡沫垫块由可旋转的多节机械臂进行运动。第一机械臂6通过接收信号指令,到达指定位置。第一夹具67作为执行端,由两组真空吸盘所构成,两组真空吸盘一起工作,每组真空吸盘为两个。当真空吸盘接触到泡沫垫块时空气压缩机将接触部位空气抽空,将泡沫垫块吸起。没有感应到泡沫垫块真空吸盘并不会动作,同一个动作执行三次,将六个泡沫垫块排成平行于输送带4的三列两行。当执行三次后泡沫垫块切割机3推送出下一组泡沫垫块,第一机械臂6重复动作。
50.如附图4
‑
7所示,第二机械臂7上具有第二感应装置,第二感应装置用于检测窑车上泡沫垫块的摆放情况。第二感应装置包括图像采集器,图像采集器用于获取窑车上泡沫垫块摆放的实时图像,实时图像为泡沫垫块上尚未摆放马桶工件状态;通过将实时图像与控制面板预存的标准外观模板进行对比,自动判断泡沫垫块摆放位置、数量是否合格;不合格时,或中断设备运行并报警,或补充泡沫垫块,或移除次摆放的泡沫垫块并重新获取新的泡沫垫块。
51.第二机械臂7末端具有可竖向旋转的转动节臂71,转动节臂71一侧具有马桶工件托架72,转动节臂71另一侧具有可竖向滑动的滑架73,滑架73一侧与转动节臂71设有的滑轨76配合,滑架73上部与转动节臂71之间具有第二伸缩缸77,第二夹具74设于滑架73。第二夹具74为气动夹爪且气动夹爪上具有防滑装置75,如防滑扎带等,以防止在夹取工作过程中泡沫垫块掉落。第一夹具67和第二夹具74均具有感应泡沫垫块的光电感应器22。第二机械臂7自动抓取泡沫垫块的动力源为气动方式,所以本实施例在第二机械臂7上还设有与第二伸缩缸77和气动夹爪连接的调压阀711,在抓取和放置这一系列的动作中有效把控好气压的大小,气压的稳定性。
52.输送带4上具有若干用于搭载马桶工件的工装板5。第二机械臂7的工件托架72在到达靠近输送带4的预设位置后,通过定区域式反射型光电开关扫描固定距离的工装板5上是否有马桶工件,如果没有第二机械臂7会自动跳过,等下一块工装板5经过,再进行扫描判断。这样就节省出了走空板的时间。
53.工作原理:(1)根据泡沫垫块摆放的数量,第二夹具74对应设置为六个并排成三列两行,当泡沫垫块由第一机械臂6放到垫块摆放台2上的指定位置后,光电感应器22检测到有泡沫垫块遮挡时发送信号给第二机械臂7,第二机械臂7接收信号进行动作。
54.(2)当第二机械臂7动作同时,输送带4运输马桶工件到达指定位置后,输送带4暂停。第二机械臂7抓取完泡沫垫块后,再移动到输送带4的预设位置,通过转动节臂71旋转调整工件托架72,将工件托架72伸入到马桶工件底部,将马桶工件托起。
55.(3)由第二机械臂7将泡沫垫块、马桶工件依次放置在运行到指定置停下的窑车1上。
56.本实施例中第二机械臂7自动抓取泡沫垫块由控制手提便携式控制面板控制(手
动控制)。而自动控制是第二机械臂7通过接收信号指令,执行编好的程序到达各指定位置,每组的气动夹爪都各自有一个光电感应器22,当第二夹具74的气动夹爪下落到泡沫垫块两侧时光电感应器22检测有泡沫垫块时自动夹紧。当第二夹具74已经夹紧泡沫垫块后,反馈信息给控制面板,控制面板调控负责托运的输送带4运输马桶工件到达指定位置,第二机械臂7再走到相应的位置通过工件托架72进行托起马桶工件的工作。窑车1到达指定工位,第二机械臂7先将泡沫垫块放置在已经设置的点位上,再旋转将马桶工件放置在泡沫垫块上。
57.传统人工放置泡沫垫块需要等待人工位完成后下一道工序才能进行工作,如果同步运行的话容易造成危险,但是本发明通过机器代替了人工位,危险指数降低,危险的范围指数也得到了很好的控制,这样一来在机器抓取完泡沫后下一道工序也运行,在去放置泡沫的过程中连着下一道工序(搬马桶工件)一起完成,这也是两步变一步走,提高了安全的同时也提高了产量。
58.应该理解的是,本发明所公开的实施例不限于这里所公开的特定处理步骤或材料,而应当延伸到相关领域的普通技术人员所理解的此类特征的等同替代。还应当理解的是,在此使用的术语仅用于描述特定实施例的目的,而并不意味着限制。
59.说明书中提到的“实施例”意指结合实施例描述的特定特征、或特性包括在本发明的至少一个实施例中。在上面的描述中,提供一些具体的细节,例如厚度、数量等,以提供对本发明的实施例的全面理解。然而,相关领域的技术人员将明白,本发明无需上述一个或多个具体的细节便可实现或者也可采用其他方法、组件、材料等实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。