1.本发明涉及端子剖面分析技术领域,尤其涉及一种全自动剖面分析仪。
背景技术:
2.端子剖面分析仪是一种专门针对端子进行切割、研磨以及剖面分析的装置设备。这个设备主要由三个离散的独立组件构成,分别为:
3.1.用于切割及研磨的机械装置a(包括xy运动平台、切割装置、研磨装置);
4.2.用于获取端子剖面图像的成像装置b(包括相机、镜头、光源、显微支架、xy微调平台);
5.3.运行专用软件用于对剖面图像进行分析测量的电脑c。
6.现有的端子的截面分析工作流程一般为:
7.1、操作者利用夹具夹持好端子,然后将夹具安置于机械装置a上;
8.2、人工控制或由plc控制装置a上的xy运动平台将端子送到切割片上进行切割,然后将切割后的端子送到磨盘上对截面进行研磨,使得截面表面光滑;
9.3、操作者将夹持有端子的夹具从机械装置a上取下,放置于成像装置b上的xy微调平台上;
10.4、操作者调整支架高度以改变物距、调整xy微调平台以便让端子处于镜头中心、调整镜头放大倍数及对焦以便获得清晰图像;以上操作由于为同时做,只有将上述条件都调整到合适的位置才有清晰的图像,由于变量太多,这个过程调整起来异常麻烦;
11.5、操作人员蘸取专用药液对端子截面进行多次擦拭,对截面进行腐蚀清洗,从而获得细节清晰的截面图像;
12.6、操作人员利用软件对图像进行分析测量等处理。
13.由上面结构组成与操作流程可见,传统剖面分析每个环节都需要人工参与,效果与操作人员的经验密切相关,整体效率不高,整个流程耗时在15
‑
30分钟之间,随人员的经验与端子的不同而不同。
14.因此,现有技术存在缺陷,需要改进。
技术实现要素:
15.本发明的目的是克服现有技术的不足,提供一种启动后不再需人工介入的全自动剖面分析仪,并将全流程耗时控制在90秒以内。
16.本发明的技术方案如下:提供一种全自动剖面分析仪,包括:分析仪主体、设置于所述分析仪主体上的双轴移动平台、设置于所述双轴移动平台的动子上的夹具、设置于所述分析仪主体上的磨切一体机构、设置于所述磨切一体机构旁侧的腐蚀组件、以及设置于所述腐蚀组件旁侧的图像识别机构,所述双轴移动平台设置于磨切一体机构、腐蚀组件以及图像识别机构旁侧,所述双轴移动平台将装载有待切割的线束端子移动至磨切一体机构处完成切割和研磨,之后再移动至腐蚀组件进行腐蚀工序,最后移动至图像识别机构进行
图像拍摄。
17.进一步地,所述夹具包括:固定座、以及设置于所述固定座上的固定夹具,所述固定夹具上设置有可伸缩的定位片,所述定位片的底部设置有复位件,所述定位片的前端从固定夹具的端面伸出,所述固定座对应定位片设置有推杆,所述固定夹具安装于固定座上时,推杆作用于定位片上使得定位片回收至固定夹具内。
18.进一步地,所述推杆的顶部设置有斜面,所述推杆通过斜面推动定位片;所述复位件为弹簧。
19.进一步地,所述磨切一体机构包括:动力机构、设置于所述动力机构的输出端上锯片安装座、设置于所述锯片安装座上的锯片压片、设置于所述锯片安装座与锯片压片之间的切割片、以及设置于所述锯片压片上的研磨片,所述动力机构驱动切割片以及研磨片进行旋转。
20.进一步地,所述研磨片的研磨面上的目数随着半径增大而减小。
21.进一步地,所述腐蚀组件包括:第一夹具、设置于所述第一夹具旁侧的第二夹具、设置于所述第一夹具上的第一棉棒、以及设置于所述第二夹具上的第二棉棒,所述第一棉棒吸收有药液,所述第二棉棒吸收有水。
22.进一步地,所述图像识别机构包括:设置于所述分析仪主体内部的高像素相机、与所述高像素相机连接的镜头、设置于所述镜头前端的反射碗、设置于所述反射碗的碗口位置的环形灯座、以及设置于所述环形灯座上的环形灯板,所述环形灯板上设置有若干led灯珠,所述led灯珠围绕环形灯板的圆心均匀分布于环形灯板上,所述led灯珠朝向反射碗内部。
23.进一步地,所述分析仪主体设有:用于安装电子元器件、电路板的腔体,用于切割、研磨及摄像的工作区,以及位于正面上的操作面板;所述双轴移动平台、磨切一体机构、腐蚀组件、以及图像识别机构均设置于工作区,所述腔体的侧面上设置有第一进气装置,所述第一进气装置设置于分析仪主体靠近图像识别机构的一侧面上。
24.进一步地,所述工作区上罩设有罩体,所述罩体的侧面设置有排气装置,所述排气装置设置于远离第一进气装置的侧面上;所述罩体上设置有第二进气装置,所述第二进气装置与第一进气装置设置于同一侧。
25.进一步地,所述图像识别机构上设置有若干送气孔,所述送气孔连通分析仪主体的腔体与工作区;所述工作区的底部对应双轴移动平台设置有条孔,所述双轴移动平台嵌入条孔内并沿着条孔内进行往复移动,所述条孔连通分析仪主体的腔体与工作区。
26.采用上述方案,本发明只需在人工夹持端子时将端子所需切割的位置对准定位片,后续即可以在软件控制下,由双轴移动平台驱动夹具依次将线束端子送往切割片、研磨片、腐蚀组件以及图像识别机构处,以对线束端子进行相应的切割、研磨、腐蚀清洗、以及截面图像获取工作,相对于传统工艺流程不同环节需要人工大量加入,全程需要15
‑
30分钟,本发明全程不需要人工参与,实现完全自动化,全流程只需一分半钟,极大提高了检测效率、检测结果的准确性与一致性,满足现代化、自动化剖面分析检测的需求。
附图说明
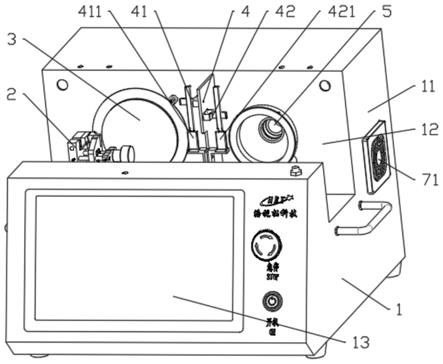
27.图1为本发明的结构示意图。
28.图2为固定夹具的结构示意图。
29.图3为夹具的结构示意图。
30.图4为磨切一体机构的结构示意图。
31.图5为图像识别机构的结构示意图。
32.图6为环形灯座的内侧结构示意图。
33.图7为罩体与分析仪主体的装配结构后侧示意图。
34.图8为罩体与分析仪主体的装配结构示意图。
具体实施方式
35.以下结合附图和具体实施例,对本发明进行详细说明。
36.请参阅图1至图3,本发明提供一种全自动剖面分析仪,包括:分析仪主体1、设置于所述分析仪主体1上的双轴移动平台、设置于所述双轴移动平台的动子上的夹具2、设置于所述分析仪主体1上的磨切一体机构3、设置于所述磨切一体机构3旁侧的腐蚀组件4、以及设置于所述腐蚀组件4旁侧的图像识别机构5。所述双轴移动平台设置于磨切一体机构3、腐蚀组件4以及图像识别机构5旁侧。所述双轴移动平台将装载有待切割的线束端子移动至磨切一体机构3处完成切割和研磨,之后再移动至腐蚀组件4进行腐蚀工序,最后移动至图像识别机构5进行图像拍摄。
37.所述夹具2包括:固定座21、以及设置于所述固定座21上的固定夹具22。所述固定夹具22上设置有可伸缩的定位片221,所述定位片221的底部设置有复位件222,所述定位片221的前端从固定夹具22的端面伸出。所述固定座21对应定位片221设置有推杆211,所述固定夹具22安装于固定座21上时,推杆211作用于定位片221上使得定位片221回收至固定夹具22内。
38.在对线束进行装夹时,将固定夹具22从固定座21上取出,推杆211与定位片221分离,通过复位件222的作用将定位片222推出,使得定位片221的前端伸出固定夹具22的端面。此时,定位片221伸出的端面指示切割面的所在位置。然后将待切割的线束放置于固定夹具22上进行装夹,并通过对照定位片221的端面位确定线束的切割面。然后将固定夹具22放置于固定座21上,使得推杆211顶部与定位片221接触,从而压缩复位件222,令定位片221移动至与固定夹具22的端面平齐的位置,避免在后续的切割工作中产生干扰。
39.完成装夹后,双轴移动平台驱动夹具2移动至磨切一体机构3的位置处,对线束端子进行切割,并对切割后形成的截面进行研磨。通过采用磨切一体机构3的集成式设置,从而减少驱动电机的数量,减小设备整体体积,同时缩短切割后线束端子的移动距离,提高切割、研磨工序的加工效率。
40.然后双轴移动平台驱动夹具2移动至腐蚀组件4对应的位置,通过腐蚀组件4对线束端子进行腐蚀处理,去除线束端子上的胶皮或其他杂质,避免后续图像识别工作中产生干扰。
41.最后双轴移动平台将夹具2移动至图像识别机构5对应位置处,通过图像识别机构5获取线束端子的截面图像信息,并对图像信息上的有用细节进行识别分析,自动生成分析检测报告,以便于操作人员了解检测分析结果,同时便于对检测结果的记录与查阅。
42.所述推杆211的顶部设置有斜面,所述推杆211通过斜面推动定位片221。当推杆
211的斜面与定位片221接触时,定位片221沿着斜面向后移动,从而回缩至固定夹具22内部,避免对后续的切割及研磨工作产生影响。
43.所述复位件222为弹簧。当推杆211与定位片221接触时,弹簧受力压缩,定位片221缩回固定夹具内。当撤去推杆211施加于定位片221上的力时,弹簧在弹性的作用下将定位片221推出,从而进行切割面的指示。
44.请参阅图4,所述磨切一体机构3包括:动力机构31、设置于所述动力机构31的输出端上锯片安装座32、设置于所述锯片安装座32上的锯片压片33、设置于所述锯片安装座32与锯片压片33之间的切割片34、以及设置于所述锯片压片33上的研磨片35。所述动力机构31驱动切割片34以及研磨片35进行旋转。
45.动力机构31驱动切割片34以及研磨片35进行旋转,双轴运动平台驱动夹具1移动至切割片34旁侧,使得线束端子与高速旋转的切割片34的刃部接触,从而进行线束端子的切割,切割位置为装夹时定位片221的端面所指示的位置。完成切割后,双轴运动平台驱动夹具1移动,驱使夹具1在y轴方向上进行移动,令线束端子离开切割片34的工作面;然后双轴运动平台驱动夹具1沿x轴方向移动至研磨片35对应的位置处,并调整夹具1在y轴上的位置,令线束端子的截面与转动的研磨片35进行接触;高速旋转的研磨片35对线束端子的截面进行研磨,从而提高线束端子截面的光滑度,以便于在后续对线束端子截面进行图像识别时减少无用细节,提高分析识别的准确性。
46.根据研磨片35的磨损程度,可通过双轴移动平台将夹具1上的线束端子移动至未磨损或磨损程度较低的研磨片35对应位置处进行研磨,以此提高研磨片35的利用率,避免频繁更换研磨片35而影响研磨效率,同时也避免采用磨损程度高的研磨片35位置对端子截面进行研磨而导致研磨效果不佳的情况。
47.所述研磨片35的研磨面上的目数随着半径增大而减小。在通过研磨片35对端子的截面进行研磨时,夹具1夹持着线束端子从研磨片35的最大直径处向研磨片35的圆心方向进行移动,从而依次完成对端子截面的粗磨与精磨,提高研磨精度,使得截面光滑,满足剖面识别分析的需求。
48.所述腐蚀组件4包括:第一夹具41、设置于所述第一夹具41旁侧的第二夹具42、设置于所述第一夹具41上的第一棉棒411、以及设置于所述第二夹具42上的第二棉棒421,所述第一棉棒411吸收有药液,所述第二棉棒421吸收有水。
49.在启动分析仪前,根据线束端子的材质选配相应的药液。将第一棉棒411浸没于所选定的药液中,再将第二棉棒421浸没于清水中。然后将第一棉棒411、第二棉棒421分别悬挂于第一夹具41以及第二夹具42上。完成线束端子截面的研磨工作后,双轴移动平台驱动夹具1移动至第一棉棒411对应位置处。使线束端子的截面与蘸有药液的第一棉棒411进行充分接触,从而对线束端子的截面进行处理,去除线束端子截面上的胶皮等杂质,避免进行图像识别时产生干扰。完成截面的腐蚀处理后,双轴移动平台驱动夹具1移动至第二棉棒421对应位置处。使线束端子的截面与蘸有清水的第二棉棒421进行充分接触,通过清水擦拭线束端子上残余的药液,提高线束端子截面的清洁度,避免残留的药液影响识别分析效果。
50.请参阅图5、图6,所述图像识别机构5包括:设置于所述分析仪主体1内部的高像素相机51、与所述高像素相机51连接的镜头52、设置于所述镜头52前端的反射碗53、设置于所
述反射碗53的碗口位置的环形灯座54、以及设置于所述环形灯座54上的环形灯板55。所述环形灯板55上设置有若干led灯珠551。所述led灯珠551围绕环形灯板55的圆心均匀分布于环形灯板55上。所述led灯珠551朝向反射碗553内部。进行照明时,环形灯板55上的led灯珠551提供环形的光源,通过反射碗53对光线进行反射后,均匀的照射于线束端子的截面上,保证端子截面的视野有足够的亮度,同时又不会产生明显的本影,起到无影灯的作用,从而增强截面上的有用细节,弱化了无用细节。
51.请参阅图1,所述分析仪主体1设有:用于安装电子元器件、电路板的腔体11,用于切割、研磨及摄像的工作区12,以及位于正面上的操作面板13。所述双轴移动平台、磨切一体机构3、腐蚀组件4、以及图像识别机构5均设置于工作区12,所述腔体11的侧面上设置有第一进气装置71,所述第一进气装置71设置于分析仪主体1靠近图像识别机构5的一侧面上。在磨切一体机构3工作的过程中,会产生飞溅的切屑并扬起灰尘。因此在磨切一体机构3进行工作时,启动第一进气装置71,将空气从分析仪主体1的外部送入到腔体11中,从而在腔体11的内部产生正压,并通过工作区12上的各机构的安装孔位的缝隙处将空气送入到工作区12中,避免切屑、灰尘等扬起的杂质进入到腔体11内部,保证腔体11内部的清洁以及防止腔体11内的电路板等元器件因飞入的杂质而影响正常工作。同时,外部空气持续送入到腔体11中,可以对腔体11内部的元器件进行降温,以提高腔体11内部各元器件的使用寿命。并且,因为第一进气装置71在腔体11形成正压环境,并将空气从各机构的安装缝隙处吹出,以此保证工作区12中各机构的正常工作,提高剖面识别分析结果的准确性。
52.请参阅图7,所述工作区12上罩设有罩体6,所述罩体6的侧面设置有排气装置72,所述排气装置72设置于远离第一进气71装置的侧面上。当第一进气装置71启动时,排气装置72同步启动,从而在腔体11以及工作区12中形成一条流通的气路,更好地将切削产生的切屑以及扬起的灰尘等杂质吹出工作区12,以提高剖面分析仪的清洁度,保证分析识别结果的准确性。
53.请参阅图8,所述罩体6上设置有第二进气装置73,所述第二进气装置73与第一进气装置71设置于同一侧。在第一进气装置71启动的同时,第二进气装置73同步启动,加快进气速度,保证工作区12的洁净。
54.所述图像识别机构5上设置有若干送气孔,所述送气孔连通分析仪主体1的腔体11与工作区12。当第一进气装置71启动时,在腔体11内形成正压环境,并通过第二送气孔吹入工作区12中,从而在图像识别机构5前形成正压环境,以防止粉尘杂质飘浮、逸散至图像识别机构5前方,保障图像分析结果的真实性及准确性。
55.所述工作区12的底部对应双轴移动平台设置有条孔,所述双轴移动平台嵌入条孔内并沿着条孔内进行往复移动,所述条孔连通分析仪主体1的腔体11与工作区12。当第一进气装置启动时,在腔体11内形成正压环境,并通过条孔吹入工作区12中,从而避免切屑、灰尘等杂质落在双轴移动平台上而影响双轴移动平台的正常移动,保证双轴移动平台移动送料的稳定性。
56.本发明的具体工作流程如下:
57.工作时,先通过双轴移动平台将夹具2复位移动至原点,并将待检测的端子夹持与夹具2上,然后通过双轴移动平台将夹具2移动至切割点。启动磨切一体机构3,并启动第一进气装置71以及第二进气装置73,以确保在磨切一体机构3对端子进行切割及研磨时所产
生的粉尘不会对图像识别机构5的工作产生影响,保障图像分析结果的真实性及准确性。双轴移动平台将夹持与夹具2上的端子移动接近切割片34,使得端子与切割片34接触,对端子进行切割。完成切割后,双轴移动平台驱动端子移动,对切割片34进行退位避让,并向研磨片35方向移动,接近研磨片35。通过研磨片35对完成切割后的端子截面进行一次或多次研磨,使得端子截面光滑,从而弱化截面上的无用细节,提高视觉成像的清晰度及准确性。
58.完成研磨后,双轴移动平台驱动端子与研磨片35脱离,并快速向腐蚀组件4的方向移动,同时关闭磨切一体机构3。随机选择位置作为腐蚀点,并使得端子截面与第一棉棒411进行接触,同时通过双轴移动平台驱动端子进行高速运动,令端子截面在第一棉棒411上持续数秒进行摩擦,去除线束端子截面上的胶皮等杂质,避免进行图像识别时产生干扰。完成截面的腐蚀处理后,双轴移动平台驱动夹具1移动至第二棉棒421对应位置处。使线束端子的截面与蘸有清水的第二棉棒421进行充分接触,通过清水擦拭线束端子上残余的药液,提高线束端子截面的清洁度,避免残留的药液影响识别分析效果。
59.完成腐蚀清洗工序后,双轴移动平台驱动端子高速移动至图像识别机构5前方的成像点位置,启动图像识别机构5对端子截面进行连续抓图,同时双轴移动机构调整端子的y轴位置,从而经由对焦算法计算并实现对端子截面的对焦工作。完成对焦后,图像识别机构5对端子截面进行抓图,并将获取的图片信息上传至控制系统中进行识别分析。控制系统启动图像分割算法,完成线芯识别,计算检测所需结果,并生成检测报告,完成检测,同时关闭第一进气装置71以及第二进气装置73,然后系统发出信号以提醒现场检测人员将端子取出,完成检测流程。
60.综上所述,本发明只需在人工夹持端子时将端子所需切割的位置对准定位片,后续即可以在软件控制下,由双轴移动平台驱动夹具依次将线束端子送往切割片、研磨片、腐蚀组件以及图像识别机构处,以对线束端子进行相应的切割、研磨、腐蚀清洗、以及截面图像获取工作,相对于传统工艺流程不同环节需要人工大量加入,全程需要15
‑
30分钟,本发明全程不需要人工参与,实现完全自动化,全流程只需一分半钟,极大提高了检测效率、检测结果的准确性与一致性,满足现代化、自动化剖面分析检测的需求。
61.以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。