1.本发明涉及雷达情报分析技术领域,尤其涉及一种基于雷达情报的空情目标识别方法及装置。
背景技术:
2.空情目标识别研判是空天预警作战的主要内容之一,对目标识别研判的准确性、及时性将直接影响作战决策和战术运用效果。对雷达和雷达网中的未知空情目标识别研判,需要根据已获取的未知空情目标的数据信息,结合已构建的空情目标特征数据库中的特征信息,进行匹配识别研判。
3.目前,随着雷达装备技术的发展,基于雷达探测技术、雷达目标信号特征等空情目标识别判性的研究较多,但基于空情目标大数据进行研判的研究较少,缺乏基于雷达情报大数据的空情目标识别研判装置。
技术实现要素:
4.本发明公开一种基于雷达情报的空情目标识别方法及装置,针对雷达及雷达网探测的未知空情目标,利用构建的空情目标特征数据库数据,对空情目标进行性质研判。
5.本发明通过以下技术方案实现。
6.一种基于雷达情报的空情目标识别方法及装置,包括:
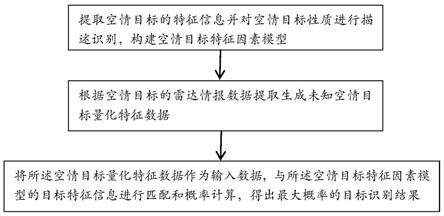
7.提取空情目标的特征信息并对空情目标性质进行描述识别,构建空情目标特征因素模型;
8.根据空情目标的雷达情报数据提取生成未知空情目标量化特征数据;
9.将所述空情目标量化特征数据作为输入数据,与所述空情目标特征因素模型的目标特征信息进行匹配和概率计算,得出最大概率的目标识别结果。
10.本发明的有益效果:
11.本发明提出了基于雷达情报信息和空情目标特征数据库,对未知空情目标进行识别研判的完整方法和流程,能够指导在实时或者事后阶段对空情目标进行特征分析与识别研判;所提出的空情目标识别研判装置结构,可应用于工程实践,解决空情目标识别研判面临的技术难题。
附图说明
12.图1为本发明基于雷达情报的空情目标识别方法流程图;
13.图2为本发明基于雷达情报的空情目标识别装置结构图;
14.图3为具体实施方式中空情目标特征因素模型的目标特征信息进行匹配和概率计算流程图。
具体实施方式
15.下面结合附图对本发明作详细说明。
16.如图1所示,本具体实施方式的一种基于雷达情报的空情目标识别方法,具体包括:
17.步骤一、提取空情目标的特征信息,形成对空情目标的特征画像,并对目标性质进行描述识别,构建空情目标特征因素模型;
18.本实施例中,所述空情目标特征因素模型如下表所示:
[0019][0020][0021]
步骤二、根据空情目标的雷达情报数据提取生成未知空情目标量化特征数据;具体步骤如下:
[0022]
001:提取空情目标雷达情报中的国家地区属性信息,如果有则提取国家地区属性作为部署位置特征信息,否则取“未知”为目标的部署位置特征信息;
[0023]
002:根据所述空间目标雷达情报数据航迹点,利用空间拓扑计算获得该目标运动
轨迹的最大边界,形成可组成多边形的经纬度位置点序列,提取为目标的活动区域特征信息;
[0024]
003:提取所述空间目标雷达情报中的机型信息,如果无机型信息,取“未知”为目标的机型信息;
[0025]
004:提取所述空间目标雷达情报中的任务信息,如果无任务信息,取“未知”为目标的任务信息;
[0026]
005:提取所述空间目标雷达情报中雷达上报首点位置信息,包含经度、维度、高度,作为目标的首点发现位置特征;
[0027]
006:提取所述空间目标雷达情报中雷达上报首点时刻,作为目标的首点发现时间特征;
[0028]
007:提取该目标雷达情报中雷达上报末点位置信息,包含经度、维度、高度,作为目标的末点发现位置特征;
[0029]
008:提取所述空间目标雷达情报中雷达上报末点时刻,作为目标的末点发现时间特征;
[0030]
009:计算所述空间目标雷达航迹末点时刻与航迹首点时刻的差值,提取为目标活动时长特征信息;
[0031]
010:计算根据所述空间目标雷达航迹飞行路径的航程,提取为目标飞行航程特征信息;
[0032]
011:提取所述空间目标雷达情报中的飞机架数的最大值,提取为目标编队特征信息;
[0033]
012:根据所述空间目标雷达航迹飞行路径,计算目标运动速度数据平均值、加速度最大值,提取为目标运动速度特征信息;
[0034]
013:根据所述空间目标雷达航迹点的高度信息,首先进行异常值剔除,然后计算目标航迹点高度数据的平均值、最大值,以及目标巡航阶段运动的高度平均值,提取为目标运动高度特征信息;
[0035]
014:利用所述空间目标雷达航迹轨迹数据,通过坐标等比例缩放方式叠加绘制在300*300像素的图片上,并保存为航迹图形特征图片文件,提取为目标航迹图形特征信息;
[0036]
在具体实施时,如果通过其他情报获知目标是所述某n种目标中的一个,则可设定目标候选集合v={v1,v2,
…
,vn},作为目标的已知集合信息。
[0037]
步骤三、将所述未知空情目标量化特征数据作为输入数据,与所述空情目标特征因素模型的目标特征信息进行匹配和概率计算,得出最大概率的目标识别结果;如图3所示,具体步骤如下:
[0038]
001:根据所述空情目标特征因素模型设定目标特征信息为:目标机型大小、部署位置、活动区域、目标发现位置、目标消失位置、目标发现时刻、目标消失时刻、目标活动时长、目标飞行航程、目标编队情况、运动速度特征、运动高度特征、执行任务特征、航迹图形特征共14个维度,用
[0039]
u={u1,u2,u3,
…
,u13,u14}表示;
[0040]
对于每个维度特征信息的权重,用w={w1,w2,w3,
…
,w14}表示;
[0041]
在具体实施时,所述目标机型大小、部署位置、活动区域特征具有关键否决权,进
行特征匹配计算时,记每项关键特征附加决定系数值为pwj,形成关键特征系数集合:
[0042]
pw={pw1,pw2,
…
,pwj},其中pwj={0,1};
[0043]
002:根据所述未知空情目标量化特征数据生成目标特征数据集合,用
[0044]
d={d1,d2,d3,
…
,d14,k}表示;
[0045]
003:遍历空情目标量化特征数据中的每一个有效目标tk(k=1,2,3
…
),提取其特征数据,与所述未知空情目标的量化特征数据进行匹配计算,获得未知空情目标特征数据与已知空情目标特征的匹配概率;具体步骤如下:
[0046]
(01)遍历未知空情目标量化特征数据集合d中的特征数据di,将特征数据di与目标t对应的特征属性信息进行对比,计算特征数据di与目标特征数据匹配度pui;
[0047]
(02)对于目标特征数据di,如果di为空值或“未知”,则记该特征匹配度 pui=0;否则转后续步骤;
[0048]
(03)对于目标特征数据di,如果di为单数值型特征,如最大飞行速度di={最大速度vmax},则取di/tdi数值作为匹配度结果;如果di为数值区间,则按照di与tdi的数值区间匹配百分比作为匹配度结果;
[0049]
(04)对于目标特征数据di,如果di为文本型特征,如机型大小di={大型机},则按照文本匹配方式进行匹配;
[0050]
(05):对于目标特征数据di,如果di为地理区域空间,则按照地理空间的交集百分比作为匹配度计算结果值;
[0051]
(06):对于目标特征数据di,如果di为飞行航迹图形,则对航迹以图形相似度对比方式进行匹配度计算,具体实施时可以采用图片相似度匹配算法;
[0052]
(07)如果目标特征数据di为关键特征数据,且目标匹配度pui>0,则记关键信息pwi=1;如果pui=0,则记pwi=0;
[0053]
(08)在已知目标候选集合v不为空的情况下,对目标t,如果目标t∈v,则记vt=1;否则记vt=0;当已知目标候选集合v集合为空时,记vt=1;
[0054]
(09)对于空情目标特征数据库中的每一个有效目标tk,未知空情目标与之匹配概率ptk为:
[0055]
ptk=vt*(pw1*pw2*
…
*pwj)*[(pu1 pu2
…
pui)/n]
[0056]
其中,n为di数据不为空且不等于“未知”特征维度总数。
[0057]
004:目标匹配识别结果
[0058]
根据所述未知空情目标特征数据与已知空情目标特征的匹配概率,按照匹配概率ptk从大到小的顺序排列获得目标集合:
[0059]
t={[t1,pt1],[t2,pt2],[t3,pt3],
…
[tk,ptk]}
[0060]
上述所得到的目标集合t即为目标匹配识别结果集合,且目标t1是概率最大的目标。
[0061]
本实施例中,在进行目标识别研判时,通过优化调整特征因素的权重指标,可以获得更加准确的目标匹配识别结果。
[0062]
如图2所示,本具体实施方式的一种基于雷达情报的空情目标识别装置,具体包括:未知空情目标量化特征数据生成单元和空情目标匹配识别单元,其中未知空情目标量化特征数据生成单元接收外部系统的位置空情目标雷达航迹数据,并进行处理分析,得到
未知空情目标量化特征数据;空情目标匹配识别单元接收未知空情目标的量化特征数据,与空情目标特征数据库中的有效目标进行遍历匹配,获得目标识别结果,提供界面显示和对外输出。
[0063]
综上所述,以上仅为本发明的较佳实例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。