1.本发明涉及医疗器械技术领域,具体而言涉及一种手术机器人的装配机构。
背景技术:
2.手术机器人能够帮助医生实现手术的精确定位,具有减少病人伤口从而缩短术后恢复时间等优势。并且其具有稳定的操作平台,能够解决医生的颤抖等情况,因而在临床外科手术中有大量的应用。
3.手术机器人中的手术器械,通常在细长管的一端处具有手术工具形式的后端执行机构,例如钳子、剪刀、夹子等。所述后端执行机构的常规运动结构是采用钢丝绳来转动后端执行机构,以完成俯仰、偏转和夹握的动作。
4.外科医生在控制台侧控制手术侧驱动器上的器械,为满足手术中不同手术器械使用需求,手术器械与器械驱动器通常设计为可拆卸性,用于在手术中更换不同手术器械需求,同时手术器械通常为可以独立的消毒灭菌。
5.器械驱动器端通常设计为不可消毒性,为保证手术过程中的无菌性,在手术时,需要在器械驱动器与器械间加入一个无菌适配器,用于隔离手术时不可消毒的器械驱动器端以及可消毒的器械端。
6.手术器械后端与无菌适配器上表面连接,器械驱动器与无菌适配器下表面进行连接,器械驱动器通过无菌适配器对手术器械后端执行机构提供驱动力,达到完成俯仰、偏转和夹握的动作目的。
7.无菌适配器下表面与器械驱动器上表面连接,连接后稳定不脱离,同时在需要解锁时能够方便快捷的将无菌适配器从器械驱动器上解锁分离,手术器械后端与无菌适配器上表面连接,连接后保持稳定不脱离,通知在需要解锁时能后方便快捷的将手术器械从无菌适配器上解锁分离。
8.在现有的器械驱动器、无菌适配器和手术器械的装配机构中,器械驱动器和无菌适配器的连接与无菌适配器和手术器械的连接,分别是单独、孤立的,在使用时可先进行器械驱动器与无菌适配器的连接或是先进行无菌适配器与手术器械的连接,同理,在拆卸时可先进行手术器械与无菌适配器的脱离还是可先进行无菌适配器与器械驱动器的脱离,这种操作顺序的不唯一性,导致使用人员在使用过程中,一方面产生装配、拆卸顺序的误操作,另一方面也会增加在使用时由于碰撞、震动而导致解锁发生事故的风险。
技术实现要素:
9.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
10.为至少部分地解决上述问题,本发明提供了一种一种手术机器人的装配机构,能够减少误操作带来的解锁风险。本发明是采用如下方案实现的:
11.一种手术机器人的装配机构,其用于连接器械驱动器、无菌适配器和手术器械盒连接,其特征在于,所述器械驱动器的上表面与所述无菌适配器的下表面配合,所述器械驱动器的上表面具有第一固定扣,所述无菌适配器上设置有第一活动扣,所述第一活动扣在沿所述器械驱动器的配合表面平行的方向与所述第一固定扣卡接;
12.所述无菌适配器的上表面与所述手术器械盒的下表面配合,所述无菌适配器的上表面具有第二固定扣,所述手术器械上盖设置有二活动扣,所述第二活动扣在沿所述器械驱动器的配合表面平行的方向与第二固定扣卡接;且
13.所述第一活动扣连接有第一操作部,所述第一操作部的上端凸出于所述无菌适配器的上表面,所述手术器械盒内具有用于容纳第一操作部的空间。
14.在上述的手术机器人的装配机构方案中,无菌适配器与器械驱动器的连接和手术器械盒与无菌适配器的连接,均有采用活动扣卡接的方式,而两者的卡接方式会产生不同的解锁方式,其中将无菌适配器与器械驱动器的卡接方式的第一操作部设置于无菌适配器的上方,并在手术器械盒内具有用于容纳第一操作部的空间,使得在器械驱动器、无菌适配器、手术器械安装完成后,第一操作部是隐藏的,不外露,至少不会由于误操作将无菌适配器和器械驱动器的连接结构解锁,从而在三者的拆卸过程中,只能按照先拆卸手术器械,然后再拆卸无菌适配器的顺序拆卸。
15.优选地,所述第一操作部上固定设置有第一操作按钮,所述手术器械内用于容纳第一操作部的空间形状与所述第一操作按钮的表面适配。在该方案中,手术器械内用于容纳第一操作部的空间形状与第一操作按钮的表面适配,在无菌适配器与手术器械盒的安装,只有当无菌适配器的第一活动扣与第一固定扣准确到位的时候,第一操作按钮才能准确的与手术器械盒内的空间配合,否则,只要无菌适配器的第一活动扣以及第一操作部以及第一操作按钮产生一点错位,都不能使得手术器械盒与无菌适配器完成对接。相应的,当无菌适配器与手术器械盒安装到位,手术器械盒内的空间限制了第一操作部在各个方向不能活动,同时也限制了第一操作部以及第一活动扣不能自由活动,只要手术器械盒和无菌适配器微脱离,无菌适配器和器械驱动器就无法脱离。
16.优选地,所述无菌适配器设置有第一移动件,所述第一活动扣与所述第一操作部均位于所述第一活动件上,所述第一活动件连接有使所述第一活动扣趋近于卡接扣位的弹性件。
17.更优选地,所述无菌适配器的上表面开设具有提供所述第一操作部移动的孔。
18.优选地,所述器械驱动器上对称设置有两组第一固定扣,两组所述第一活动扣位于所述器械驱动器传动部分的两侧,所述无菌适配器上对称设置有两组第一活动扣,两组所述第一活动扣位于所述适左右配器传动部分的两侧,两组所述第一活动扣分别与两组第一固定扣卡接;
19.所述器械驱动器的表面还具有钩形凹陷的表面部分,所述无菌适配器的下表面具有钩形凸出的表面部分,所述无菌适配器的钩形凸出的表面部分可嵌入所述器械驱动器的钩形凹陷的表面部分。
20.更优选地,所述器械驱动器上钩形凹陷的表面部分与所述器械驱动器上的第一固定扣跨距设置,所述无菌适配器钩形凸出的表面部分与所述无菌适配器上的第一活动扣跨距设置。
21.优选地,所述手术器械具有第二活动扣组件,所述第二活动扣组件包括有第二移动件和第二操作部,所述第二移动件上包括有第二活动扣以及被动部,所述第二活动扣与所述被动部固定连接,所述第二操作部上包括有致动部和第二操作按钮,所述第二操作按钮与所述致动部固定连接,所述致动部限制所述被动部的移动轨迹。
22.更优选地,所述第二操作部的致动部为斜面,所述斜面在所述沿手术器械的左右两侧方向及前后两侧方向均有分量,所述被动部与所述斜面线接触或面接触。
23.更优选地,所述手术器械盒上设置有导向组件,所述第二活动件受所述导向组件限制,仅在沿手术器械盒的前后方向移动。
24.更优选地,所述第二活动扣组件还包括有导向件,所述导向件与所述第二移动件固定连接,所述导向件受所述导向部限制,仅在沿手术器械盒的前后方向移动。
25.更优选地,所述无菌适配器的上表面的第二固定扣设置有两组,两组所述第二固定扣位于所述无菌适配器的传动部分的两侧,每组所述第二固定扣至少包括2个第二固定扣,至少2个第二固定扣跨距设置;
26.所述第二活动件设置有两个,每个所述第二移动件上包括有至少2个第二活动扣,至少2个所述活动扣固定并跨距设置。
27.优选地,所述第二操作部固定连接有第二操作按钮,所述第二操作按钮位于所述手术器械盒表面的两侧。
附图说明
28.本发明的下列附图在此作为本发明的一部分用于理解本发明。附图中示出了本发明的实施例及其描述,用来解释本发明的原理。
29.附图中:
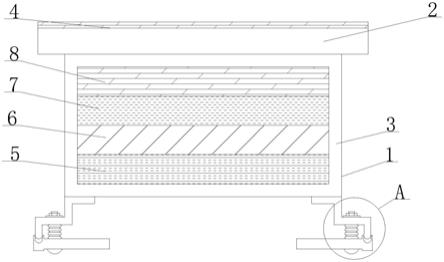
30.图1是本发明实施例中器械驱动器、无菌适配器和手术器械的装配完成状态示意图
31.图2本发明实施例中器械驱动器、无菌适配器和手术器械的拆解状态示意图
32.图3是本发明实施例中器械驱动器和无菌适配器装配完成状态的侧视图
33.图4是本发明实施例中器械驱动器和无菌适配器未装配时的状态侧视图
34.图5是本发明实施例中器械驱动器与无菌适配器的第一连接位点的结构示意图
35.图6是本发明实施例中器械驱动器和无菌适配器的连接结构的拆解状态示意图
36.图7是本发明实施例中无菌适配器与手术器械的拆解状态示意图
37.图8是本发明实施例中第一固定扣的结构示意图
38.图9是本发明实施例中无菌适配器的拆解结构示意图
39.图10是本发明实施例中手术器械盒的分解结构示意图
40.附图标记说明:
41.100器械驱动器101器械驱动器的装配表面
42.103钩形陷位103a钩形陷位的前部
43.103a1构成钩形陷位的前部的面103b构成钩形陷位的后部的面
44.103b1平直面103b2弧度面
45.103b3斜面1031钩形陷位的侧部
以及类似的表述只是为了说明的目的,并非限制。
76.本实施例提供了一种手术机器人手术器械及驱动传动部分的机构。以下结合附图对本发明的实施方式进行说明。
77.在本实施例中,手术器械驱动及传动部分的机构主要包括三大部分,器械驱动器、无菌适配器和手术器械。
78.其中,器械驱动器安装于手术机器人的末端滑动臂上,可以在滑动臂上上下移动。器械驱动器中有若干个驱动电机,可以是三个、四个或五个等,每个电机对应有一输出轴,器械驱动器的电机连接输出轴通过器械驱动器表面的传动结构、无菌适配器的传动结构以及手术器械的传动结构向手术器械的执行机构传递动力,以驱动手术器械夹爪的俯仰、偏转和夹握的动作。
79.无菌适配器,隔绝器械驱动器与手术器械的直接接触,其连接在无菌围帘上,无菌围帘和无菌适配器将手术机器人的机械臂和器械驱动器进行包裹起来,使得机械臂和器械驱动器与外部隔绝,无菌适配器则接合在器械驱动器的上端表面,无菌适配器上设置有适配器传动件,以传递动力。
80.手术器械,与无菌适配器接合,手术器械设置有器械传动件,并通过与无菌适配器的适配器传动件配合,由器械驱动器驱动手术器械的俯仰、偏转和夹握的动作。
81.具体的以下结合具体实施例和附图,对手术器械驱动传动部分的机构做出说明。
82.首先,在实施例中,为描述各个机构组件的位置关系,定义多个方向名词,这些方向名词的解释,以手术器械的套管的的纵长方向为z方向,以无菌适配器的背板的跨度方向为x方向,以无菌适配器背板至手术器械套管的延伸方向为y方向,其中,“上”、“下”指示的是器械驱动器、无菌适配器、手术器械在使用时的视觉角度,“前”、“后”是以手术器械的手术器械套管与手术器械盒的背部角度为基本方向,其中手术器械套管的方向可为“前”,手术器械盒的背部方向为“后”,“左”“右”则是以正视手术器械套管的视角能看到的手术器械盒两侧的左右方向。
83.如图1,是器械驱动器100、无菌适配器200和手术器械300的装配完成后的结构示意图。其中,器械驱动器100、无菌适配器200、手术器械300依次在上下表面(也即xy面)具有适配的结构,使得器械驱动器的上表面,无菌适配器的上表面、下表面和手术器械盒的下表面在装配后不可见。如图2,是器械驱动器100、无菌适配器200和手术器械300的拆解状态示意图。
84.具体的,器械驱动器100包括有用于与无菌适配器配合的装配表面101,器械驱动器的装配表面101与无菌适配器的装配表面呈大小、形状均配合的结构。器械驱动器100的装配表面101开设用于安装器械驱动器传动件的安装孔,器械驱动器传动件130位于安装孔内,并且器械驱动器传动件130的上表面凸出于器械驱动器的装配表面。器械驱动件130的数量,与输出轴的数量相同,可以是三个、四个、五个或更多个。
85.无菌适配器200,其无菌适配器的下表面221与器械驱动器的装配表面 101配合,其无菌适配器的上表面211与手术器械后端的手术器械盒300配合。无菌适配器200的结构,主要包括上部壳体210、下部壳体220和贯通于上部壳体和下部壳体的无菌适配器传动件230。
86.器械驱动器110和无菌适配器200,其位于驱动器传动件130和无菌适配器传动件
230的传动连接的部分为传动区域,其位于靠近器械驱动器110和无菌适配器200的装配表面的边缘部分的区域为非传动区域。器械驱动器与无菌适配器的非传动部分的连接,主要位于非传动区域。
87.器械驱动器与无菌适配器的连接
88.器械驱动器100与无菌适配器200的连接结构,以扣接的方式。其中,器械驱动器100与无菌适配器200沿着器械驱动器左右两侧设置有两组的扣接位。每组的扣接位至少包括有两处扣接位置。其中一组是以器械驱动器的装配表面与无菌适配器的装配表面进行刚性配合。也即,器械驱动器的上盖上一体成型具有一部分扣接表面与无菌适配器的下部壳体一体成型的扣接表面,两个扣接表面配合后形成了卡扣连接。另外一组是以活动卡扣连接的方式进行扣接。
89.具体的,如图2,图3和图4,器械驱动器100的装配表面101与无菌适配器的装配表面呈大小、形状均配合的结构。其中,器械驱动器与无菌适配器之间具有刚性表面配合的卡扣连接位点。在实施例中,如图4,图5,器械驱动器具有一部分凹陷的钩形陷位103,形成该钩形陷位的表面与器械驱动器的装配表面101呈一体结构,也即,构成该钩形陷位103的部分,与器械驱动器的上部壳体210为一体成型。相应的,无菌适配器的下表面221,有一部分凸起的钩形构件222,该无菌适配器的钩形构件222与无菌适配器的下表面 221呈一体式结构,也即,该无菌适配器的钩形构件222与无菌适配器的下部壳体220一体成型。在安装时,将无菌适配器的钩形构件222嵌入到器械驱动器的钩形陷位103内,通过楔紧的方式,其在竖直方向上具有分力,同时使得无菌适配器200与器械驱动器100在该部分的配合不需要采用外部构件,更重要的是,在此处无菌适配器与器械驱动器的配合具有一定的刚性,在一定程度上避免了由于外部构件过多、可活动构件过多、弹性构件、复杂构件等产生的较高的累积公差。
90.在实施例中,钩形陷位103,在沿器械驱动器的左右跨度方向上具有一定的宽度,钩形陷位沿器械驱动器的前后方向上,从钩形陷位的一端至另一端具有多段连续的曲面和/或直面的组合。实施例中,钩形陷位103具有两个,分别位于器械驱动器的两侧并位于靠近器械驱动器前端的位置,钩形构件222 也具有两个,分别位于无菌适配器的前端的两侧。
91.在实施例中,钩形构件222,在沿无菌适配器的左右跨度方向上具有一定的宽度,这个宽度与钩形陷位的宽度大致相同,且钩形构件沿无菌适配器的前后方向上,从钩形构件的一端至另一端具有多段连续的曲面和直面的组合。钩形陷位和钩形构件,从视觉上形状是互补的。
92.在实施例中,钩形陷位103主要包括靠近器械驱动器前侧的前部103a和靠近器械后侧的后部103b。其中,前部103a的上方是器械驱动器的上部壳体的实体结构,前部103a是用于容纳钩形构件前端的容纳空间。也即构成前部 103a的面103a1,实质上为器械驱动器的上部壳体的实体结构在器械驱动器的左右跨度方向上具有大致呈“s”形的表面。构成后部103b的面,具有一部分平直面103b1续接构成前部的面103a1,还具有一部分平弧度面103b2及斜面 103b3续接器械驱动器的装配表面101。
93.相应的,钩形构件主要包括位于无菌适配器前侧的前部222a和靠近无菌适配器后侧的后部222b。钩形构件的前部222a是实体结构,其实体结构形成的面222a1在无菌适配器的左右跨度方向的表面大致呈“s”形。钩形构件的前部222b也为实体结构,其实体结构在左
右跨度方向上具有续接222a1的平直面222b1、弧度面222b2及续接无菌适配器下表面221的斜面222b3。
94.进一步的,如图6,器械驱动器的钩形陷位103可以有一个或两个平直的侧部1031,侧部1031可以是竖直面或倾斜面,在侧部1031的上部,具有一部分平滑弧形面或曲面,该部分平滑弧形面或曲面是钩形陷位的导向部1032,无菌适配器的钩形构件222相应的,其也具有平直的侧部2221可以与钩形陷位的侧部1031配合,且钩形构件的侧面的下端2222也为平滑的曲面或弧形面结构,这部分结构中,钩形陷位的侧部1031与钩形构件的侧部2221能够形成紧密配合,可以在钩形构件在插入钩形陷位时,限制钩形构件222在左右方向上也即x方向上不移动,进而限制无菌适配器200在x方向上的不移动,而钩形陷位的导向部1032以及钩形构件的下端2222的曲面或弧形面则具有导向的作用,在无菌适配器的钩形构件嵌入至器械驱动器的钩形陷位时更为顺滑自然。
95.进一步的,在无菌适配器的下端的前侧,也即位于钩形构件上端的前方,具有一让位部223,如图5,让位部223的结构为斜面或平滑弧面,该让位部 223的斜面或平滑弧面与钩形构件的钩形面平滑过渡,也即钩形构件的钩形面与斜面在左侧视角度大致呈<形结构,<形的上部翼是让位部的斜面或平滑弧面,<形的下部翼是钩形构件222的钩形面的一部分。
96.以上无菌适配器与器械驱动器钩形表面配合的部分,是二者的第一连接位点。无菌适配器与器械驱动器进一步还具有第二连接位点,第二连接位点为活动卡扣的连接方式。第二连接位点与第一连接位点跨距设置,也即在无菌适配器和器械驱动器的配合表面上并且在前后方向也即在y方向上具有跨度。
97.具体的,如图6,在器械驱动器设置有第一固定扣104,无菌适配器包括有第一活动扣241,第一活动扣241与第一固定扣104可在上下方向上形成卡接,也即,第一固定扣104具有方向向下的卡接面1041,活动扣241具有方向向上的卡接面2411。
98.在实施例中,如图6,图7,在器械驱动器的上表面101一体成型有第一固定扣104,第一固定扣104凸出于器械驱动器的上表面101,并与器械驱动器的上部壳体一体成型。第一固定104扣呈凸起形状,在其大致中间位置具有卡扣空间,该卡扣空间可以容纳第一活动扣,该空间的顶部即为第一固定扣的卡接面1041,使得第一活动扣和第一固定扣在上下方向形成卡接。
99.如图7,在无菌适配器上设置有第一活动扣241。在如图的实施方式中,在无菌适配器上设置有第一活动件240,第一活动件240的下部具有第一活动扣241,第一活动件240的上部为第一操作部242,第一操作部242连接有第一操作按钮243,第一活动件240还具有第一导向部244和与导向部连接的弹簧225。在无菌适配器开设有用于容纳第一导向部244的导向槽224,导向槽 224和第一导向部244,能够限制第一活动件240的移动方向,也即导向槽224 沿无菌适配器的跨度方向设置,也即沿x方向设置,同样的,第一导向部244 也是沿x方向延伸。第一导向部244连接有弹簧,弹簧的一端抵接于导向槽224内,弹簧的另一端与第一导向部抵接,弹簧驱使导向部及活动件在x方向上向导向槽另一侧方向的力。在实施例中,无菌适配器具有上部壳体210 和下部壳体220两部分,导向槽开设于下部体220上,且导向槽224的两端封闭,使得导向部244的活动范围只能在导向槽224内。在图示的实施例中,无菌适配器两侧的活动件分别各自连接有弹簧,不产生联动,但是在操作时,可以捏住两个
操作按钮,两个操作按钮分别带动各自连接的第一操作部及第一活动扣完成活动扣从锁定位置到解锁位置的移动。在一些实施例中,用于容纳两个导向部的导向槽可以连通设置,并再两个导向部之间连接一个弹簧,使得两个导向部或两个活动件联动。
100.其中,在实施例中,如图7,在无菌适配器的上部壳体210上,开设有供第一操作部242能够有移动空间的开口212,开口大致位于导向槽224的上方。第一活动件240的第一操作部242凸出于无菌适配器的上表面211,也即其连接的第一操作按钮243位于无菌适配器上表面的上方,同时在手术器械盒内具有用于容纳第一操作按钮243的第一操作部插入位2124,在装配时由手术器械盒将第一操作部242和第一操作按钮243隐藏。
101.器械驱动器的第一固定扣,还以特定的结构形式与无菌适配器的下表面配合,使得这部分活动扣接的部分,不仅具有扣合的功能,还兼具导向及紧密配合的功能。具体的,如图8,器械驱动器的第一固定扣的上端部分,其在 x方向,y方向,均具有平滑的曲面结构1042,同时在第一固定扣的两侧,与yz面上平直的配合面1043,并且第一固定扣的下端部分,其靠近无菌适配器后端的方向,在绕z轴方向上具有平滑弧面1044。相应的,在无菌适配器的下壳体,具有用于第一固定扣嵌入的凹陷结构225,如图6,凹陷结构225 在x方向、y方向上均具有平滑的曲面结构,能与固定扣完美配合。无菌适配器与器械驱动器的连接,是从器械驱动器的前端向器械驱动器的后端进行安装,因此在固定扣的前端具有坡度曲面1045进行导向,而其后端为z轴曲面。
102.此处第二连接位点与前述的钩形配合表面相似的,还使得固定扣和无菌适配器的用于固定扣嵌入的凹陷结构配合具有一定的刚性,在一定程度上减少了由于活动扣和固定扣的活动扣接方式带来的累积公差。
103.无菌适配器与器械驱动器在安装时,可以将无菌适配器的钩形表面先斜插入器械驱动器的钩形凹陷内,然后将无菌适配器的后端下压,使得器械驱动器的第一固定扣插入无菌适配器的凹陷结构内,然后借助无菌适配器的第一活动扣下端的斜面与器械驱动器的第一固定扣上端的斜面挤压产生在x方向上的分力,使得无菌适配器的第一活动件整体挤压弹簧,并向无菌适配器传动部分的方向移动,然后无菌适配器带动活动件继续下压,然后第一活动扣压至其第一活动扣的卡接面低于与第一固定扣的卡接面时,由弹簧的推力,将第一活动扣插入第一固定扣内,形成卡接。
104.无菌适配器与手术器械的连接
105.无菌适配器与手术器械的连接,也是以活动扣卡接的方式。其中,如图9,在无菌适配器的上表面,具有两组第二固定扣213,也即两组第二固定扣213 与无菌适配器的上部壳体210一体成型。手术器械盒310,如图10包括有一座体312,用于安装钢丝绳柱,钢丝绳的下端,即为手术器械的传动连接件。在该座体312上,设置有第二活动扣组件330。第二活动扣组件330,包括第二活动扣3311,活动扣3311的卡接面33111朝上,第二活动扣331可与第二固定扣213在竖直方向上形成卡接。
106.具体的,图10,第二活动扣组件330包括有第二活动件331,第二活动件包括有两个或者多个第二活动扣3311和位于两个第二活动扣之间的连接臂 3312。连接臂3312具有一定的长度,使得两个第二活动扣3311之间跨距设置。两个第二活动扣组件331的连接臂3312的设置,位于座体的左右两侧,也即位于手术器械盒内的左右两侧。连接臂3312的延伸方向,沿着手术器械盒的前后方向,也即y方向。连接臂3312与两个或多个第二活动扣3311固
定连接,使得三者成为一体。相应的,两组第二活动扣位于无菌适配器的传动部分的两侧,每组中的两个或多个第二活动扣跨距设置。
107.由于手术器械盒内传动部分的限制,限定第二活动扣3311的锁定位置和解锁位置,均位于连接臂3312的长度方向上,也即第二活动扣3311的移动方向,是沿着连接臂3312的长度方向的。具体的,第二活动组件还包括有导向杆332,导向杆的两端通过两个导向杆座3121与座体312固定连接。连接臂3312上开设有用于导向杆穿过的导向槽(图未示出),导向杆332穿过连接臂上的导向槽,使得连接臂只能沿着导向杆3312移动,也即,导向杆与连接臂的连接,形成了限制第二活动件移动的导向组件。其中,导向杆332的两端之间的距离,是连接臂3312能移动的最大距离。在导向杆332的一端套设有弹簧333,使得弹簧333的一端与连接臂3312抵接,弹簧333的另一端与导向杆座3121抵接。在自然状态下,由于弹簧的驱使力,使得连接臂3312 和第二活动扣3311处于锁定位置。相应的,位于无菌适配器上表面的第二固定扣213,其进入卡接面的开口方向,应朝着第二活动扣3311的移动方向。在实施例中,导向杆3312和连接臂3312位于手术器械盒内,因此在座体312 上开设有孔3123,提供用于第二活动扣3311活动的空间,以及能够与第二固定扣213扣合卡接的位置。
108.第二活动组件330还包括有第二操作部332。在实施例中,操作部332的移动方向与连接臂3312的移动方向不同。也即,第二操作部332与第二活动件331非固定连接。具体的,第二活动件331具有一被动部3313,被动部3313 固定设置于连接臂3312上,在一些实施例中,被动部3313和第二活动件331 的其他部件一体成型。第二操作部332包括有致动部3322,致动部3322具有致动面,使得被动部3313与致动面能够形成线接触或面接触,致动部3322 的致动面能够被动部3313的移动轨迹。在一些实施例中,致动面可以是斜面或弧形面,被动部可以是斜面或弧形面。在一些实施例中,被动部3313也可以设置为轴承,被动部可以在致动部的致动面上形成滚动。
109.在实施例中,第二操作部332还包括有第二操作按钮3321,第二操作按钮3321与致动部3322固定连接,第二操作按钮3321设置于手术器械盒的两侧,第二操作部332使用时需要在从手术器械的两侧向器械盒向内按压,因此第二操作部332的移动方向是沿手术器械盒310的跨度方向,也即x方向。斜向的致动面3321,使得被动部3313的受力能够分解出沿手术器械盒310前后方向的力,也即y方向的力,从而使得致动部3322带动连接臂以及第二活动扣向着解锁的方向移动。
110.在实施例中,第二活动组件330还包括有帮助第二操作部的移动导向的导向件334。具体的,第二操作部332还包括有第二导向部3323,导向件334 与第二导向部3323在手术器械盒的跨度方向上具有若干面配合,也即,导向件与第二导向部的导向方向为x方向。第二导向部与导向件之间还连接有弹簧(图未示出),使得弹簧的一端与第二操作部332抵接,弹簧的另一端与导向件334抵接。
111.在实施例中第二操作部332还开设有与限位腰孔3324,并在座体312上固定设置有限位柱3122,限位柱穿过限位腰孔,限位柱穿过限位腰孔,以一方面使得第二操作部不会从手术器械盒脱出,另一方面,限位腰孔的两端,是第二操作部的解锁位和锁定位。
112.在实施例中,结合手术器械盒无菌适配器活动扣的卡接结构,还可以设置精确导向和精确定位。
113.具体的,无菌适配器的上表面凸出有固定扣213,实施例中,两组固定扣 213与无
菌适配器的上部壳体210一体成型。无菌适配器的固定扣213具有卡接面,卡接面的方向朝下,使得固定扣的上端部分不需要与手术器械盒的活动扣产生连接。在实施例中,在固定扣的上端,其在x方向、y方向上均具有平滑的曲面结构,同时在固定扣的左右两侧,具有在yz面上平直的配合面,并且固定扣的下端部分,其靠近无菌适配器前端的方向,具有绕z轴方向上的弧度面。手术器械与无菌适配器的连接,是从无菌适配器的上方向下安装,从操作上,其在细小的角度上,先对接的是无菌适配器与手术器械盒的后侧,因此,在固定扣的后端具有坡度面进行导向,而其前端为z轴曲面。相应的,在手术器械盒的下表面301具有用于固定扣嵌入的固定扣嵌位313,而手术器械的活动扣则位于凹陷结构内。凹陷结构在x方向、y方向上均具有平滑的曲面结构,能与固定扣完美配合。
114.具体的,在固定扣嵌位313的入口处,在x方向、y方向均具有平滑的曲面结构313a。在凹陷结构的内部,具有与固定扣213的上端配合的曲面。
115.实施例中的无菌适配器的固定扣和手术器械的凹陷结构不仅能用于二者的连接,还能起到导向作用,同时因二者的表面的配合,在配合的面上有具有一定的刚性,在一定程度上减少了由于活动扣和固定扣的活动扣接方式带来的累积公差。
116.除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中出现的诸如“设置”等术语既可以表示一个部件直接附接至另一个部件,也可以表示一个部件通过中间件附接至另一个部件。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
117.本发明已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施方式范围内。本领域技术人员可以理解的是,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。