技术特征:
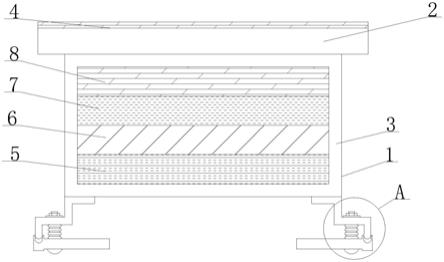
1.一种手术机器人的装配机构,其用于连接器械驱动器、无菌适配器和手术器械盒连接,其特征在于,所述器械驱动器的上表面与所述无菌适配器的下表面配合,所述器械驱动器的上表面具有第一固定扣,所述无菌适配器上设置有第一活动扣,所述第一活动扣在沿所述器械驱动器的配合表面平行的方向与所述第一固定扣卡接;所述无菌适配器的上表面与所述手术器械盒的下表面配合,所述无菌适配器的上表面具有第二固定扣,所述手术器械上设置有二活动扣,所述第二活动扣在沿所述器械驱动器的配合表面平行的方向与第二固定扣卡接;且所述第一活动扣连接有第一操作部,所述第一操作部的上端凸出于所述无菌适配器的上表面,所述手术器械盒内具有用于容纳第一操作部的空间。2.根据权利要求1所述的手术机器人的装配机构,其特征在于,所述第一操作部上固定设置有第一操作按钮,所述手术器械内用于容纳第一操作部的空间形状与所述第一操作按钮的表面适配。3.根据权利要求1或2所述的手术机器人的装配机构,其特征在于,所述无菌适配器设置有第一移动件,所述第一活动扣与所述第一操作部均位于所述第一活动件上,所述第一活动件连接有使所述第一活动扣趋近于卡接扣位的弹性件。4.根据权利要求3所述的手术机器人的装配机构,其特征在于,所述无菌适配器的上表面开设具有提供所述第一操作部移动空间的孔。5.根据权利要求1或2所述的手术机器人的装配机构,其特征在于,所述器械驱动器上对称设置有两组第一固定扣,两组所述第一活动扣位于所述器械驱动器传动部分的两侧,所述无菌适配器上对称设置有两组第一活动扣,两组所述第一活动扣位于所述适左右配器传动部分的两侧,两组所述第一活动扣分别与两组第一固定扣卡接;所述器械驱动器的表面还具有钩形凹陷的表面部分,所述无菌适配器的下表面具有钩形凸出的表面部分,所述无菌适配器的钩形凸出的表面部分可嵌入所述器械驱动器的钩形凹陷的表面部分。6.根据权利要求5所述的手术机器人的装配机构,其特征在于,所述器械驱动器上钩形凹陷的表面部分与所述器械驱动器上的第一固定扣跨距设置,所述无菌适配器钩形凸出的表面部分与所述无菌适配器上的第一活动扣跨距设置。7.根据权利要求1或2所述的手术机器人的装配机构,其特征在于,所述手术器械具有第二活动扣组件,所述第二活动扣组件包括有第二活动件和第二操作部,所述第二活动件上包括有第二活动扣以及被动部,所述第二活动扣与所述被动部固定连接,所述第二操作部上包括有致动部和第二操作按钮,所述第二操作按钮与所述致动部固定连接,所述致动部限制所述被动部的移动轨迹。8.根据权利要求7所述的手术机器人的装配机构,其特征在于,所述第二操作部的致动部沿手术器械的左右两侧方向及前后两侧方向均有分量,所述被动部与所述斜面线接触或面接触。9.根据权利要求7所述的手术机器人的装配机构,其特征在于,所述手术器械盒上设置有导向组件,所述第二活动件受所述导向组件限制,仅在沿手术器械盒的前后方向移动。10.根据权利要求9所述的手术机器人的装配机构,其特征在于,所述第二活动扣组件还包括有导向件,所述导向件与所述第二活动件固定连接,所述导向件受所述导向部限制,
仅在沿手术器械盒的前后方向移动。11.根据权利要求7所述的手术机器人的装配机构,其特征在于,所述无菌适配器的上表面的第二固定扣设置有两组,两组所述第二固定扣位于所述无菌适配器的传动部分的两侧,每组所述第二固定扣至少包括2个第二固定扣,至少2个第二固定扣跨距设置;所述第二活动件设置有两个,每个所述第二移动件上包括有至少2个第二活动扣,至少2个所述活动扣固定并跨距设置。12.根据权利要求1或2所述的手术机器人的装配机构,其特征在于,所述第二操作部固定连接有第二操作按钮,所述第二操作按钮位于所述手术器械盒表面的两侧。
技术总结
本发明公开了一种手术机器人的装配机构,其用于连接器械驱动器、无菌适配器和手术器械盒连接,无菌适配器上具有第一活动扣与器械驱动器上的第一固定扣连接,手术器械上具有第二活动扣与无菌适配器上的第二固定扣连接,其中第一活动扣具有第一操作部,第一操作部的上端位于无菌适配器的上方,手术器械盒内具有用于容纳第一操作部的空间。该手术器械盒能够将无菌适配器的第一操作部隐藏在我手术器械盒内部,防止了因误操作而导致无菌适配器与器械驱动器的解锁风险。动器的解锁风险。动器的解锁风险。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:深圳康诺思腾科技有限公司
技术研发日:2021.07.14
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。