车用杂散光测试车
1.相关申请的交叉引用
2.本技术要求2019年4月17日提交的美国专利申请第16/386,941号的优先权,其完整内容以引用的方式并入本文中。
技术领域
3.本说明书涉及相机的杂散光性能。
技术实现要素:
4.本说明书描述与用以表征车辆上的车载相机在各种环境条件下的性能的测试设备有关的技术。
5.一般而言,本说明书中所描述的主题内容的一个创新方面可体现于一种杂散光测试设备,该杂散光测试设备包括:光学组件,包括沿着光学路径的空间扩展光源;支撑光学组件的可移动框架,包括用于导引杂散光测试设备相对于车辆上的车载相机的定位的一个或多个可调整对准特征元件,其中使用可调整对准特征元件位置相对于车载相机定位杂散光测试设备包括将光学组件的光学路径定位于车载相机的视场内;和护罩机构,被附接至框架并定位于框架上,使得当杂散光测试设备相对于车辆上的车载相机对准且光学组件的光学路径在车载相机的视场内时,车载相机的环境光曝露低于阈值。此方面的其他实施例包括对应系统、设备和编码于计算机存储装置上的被配置为执行方法的动作的计算机程序。
6.这些和其他实施例可以各自可选地包括以下特征中的一个或多个。在一些实施方案中,杂散光测试设备还包括控制单元,该控制单元与光学组件数据通信,并且可操作以对车辆上的车载相机执行进行杂散光测试的操作。控制单元可与用于车载相机的车载数据收集单元数据通信。
7.在一些实施方案中,空间扩展光源是部分使用离轴抛物面镜来产生的和/或包括一个或多个中性密度滤光器。例如,在杂散光测试测量期间,可允许来自空间扩展光源的光到达车载相机。
8.在一些实施方案中,可调整对准特征元件(例如保险杆)的位置能够在一个或多个维度上被调整。护罩机构可选自由挡板、遮光帘和圆顶结构组成的组。护罩机构可包括用以(例如使用磁体、吸盘等)围绕车辆上的车载相机定位护罩机构的夹具。
9.一般而言,本说明书中所描述的主题内容的另一创新方面可体现于一种用于确定车载相机的杂散光性能的方法,该方法包括:使用一个或多个可调整对准特征元件,将杂散光测试设备相对于车载相机对准;相对于车载相机定位护罩机构,使得相机的环境光曝露低于阈值;从来自光源的多个不同光强度选择第一光强度;使车载相机曝露于来自光源的特定光强度和由车载相机捕获图像数据;和基于捕获的图像确定车载相机的性能度量。
10.这些和其他实施例可以各自可选地包括以下特征中的一个或多个。在一些实施方案中,该方法可还包括:将控制指令提供至与杂散光测试设备的光学组件和用于车载相机
的车载数据收集单元数据通信的控制单元,以由车载相机针对来自光源的光的每个强度捕获图像数据(例如,在车载相机曝露于来自光源的光的强度期间)。
11.在一些实施方案中,相对于车载相机对准杂散光测试设备包括:在车载相机的视场内对准光源的光学路径。确定车载相机的杂散光性能还可以包括:确定在车载相机的视场内光源的多个入射角下车载相机的杂散光性能。
12.在一些实施方案中,相对于车载相机定位护罩机构使得车载相机的环境光曝露低于阈值包括将环境光曝露降低90%或更多。相对于车载相机定位护罩机构使得车载相机的环境光曝露低于阈值可以包括车载相机的信噪比对应于环境光减少至低于车载相机的动态范围的25%。
13.可实施本说明书中所描述的主题内容的特定实施例以实现以下优点中的一个或多个。此技术的优点在于,其可用于校准车载相机的杂散光性能,具体地,相机当由空间扩展光源(例如太阳、远光灯或类似者)照射时的性能,而不受周围环境的影响。通过使用无限远处的扩展光源,设备可用于模拟相机在入射角范围内捕获太阳的至少一部分的条件。模拟太阳照射条件可帮助形成(例如)车载相机的抑制比以改善在包括杂散光源的曝光条件下的相机性能。可重新创建测试条件以评估对相机的成像路径中的光学表面的污染物影响或环境和/或操作影响。可容易地且以可重复方式相对于特定车载相机对准的测试车(testing cart)可减少操作者错误并改善进行杂散光性能测量的效率。
14.本说明书中所描述的主题内容的一个或多个实施例的细节在附图和以下描述中阐述。本主题内容的其他特征、方面和优点将从描述、附图和权利要求中变得清晰。
附图说明
15.图1a是其中杂散光测试车可用于表征车辆的车载相机的性能的示例环境的框图。
16.图1b是其中部署杂散光测试车的另一示例环境的框图。
17.图2a是用于杂散光测试车的示例光学组件(assembly)的框图。
18.图2b是用于杂散光测试车的示例护罩机构的框图。
19.图3是用于利用杂散光测试车来表征车辆的车载相机的性能的示例过程的流程图。
具体实施方式
20.概述
21.本专利申请的技术是一种用以表征在杂散光条件下车辆上的车载相机的性能的杂散光测试设备。该技术利用无限远处的空间扩展光源和护罩机构以在测试条件期间遮挡(obscure)环境光以模拟杂散光源(例如太阳),该杂散光源在入射角范围内照射自主/半自主汽车的特定车载相机。
22.更具体地,该技术在测试车上并入空间扩展光源,该测试车可相对于车辆上的车载相机定位以表征车载相机的杂散光性能,例如,以模拟当太阳或其他高强度光源落入相机的视场内时车载相机的操作。测试车包括光源,该光源包括高强度灯(例如氙气灯泡或高强度发光二极管)、离轴抛物面镜、用于控制波束的光斑大小的光阑(iris)、用于调整光强度输出的机构(例如,使用滤光器和/或光源强度),以及可选地用以调整空间扩展光源相对
于相机的入射角的两个旋转台。另外,测试车可包括控制器,该控制器操作光源(例如,调整光源的强度,开启/关闭光源等)且可以可选地在用于车辆的测试车与车载数据收集单元之间对接。测试车还包括护罩机构,该护罩机构可使相机曝露于环境光维持低于阈值,同时例如经由镜头筒允许来自光源的光的波束到达车载相机。护罩机构可以是例如遮光布(blackout cloth)、可调挡板、圆顶状结构或其组合。
23.测试车可用于对车载相机执行杂散光校准测试。在第一步骤中,例如使用一个或多个对准点将测试车邻近包括车载相机的车辆对准。可使用护罩机构来罩住待测试的车载相机,且可进行“暗”参考测量。在第二步骤中,将“现在测试”信号提供至受测试车辆的车载数据收集单元,且将车载相机曝露于来自测试车的杂散光源达一时间长度(例如几秒钟)。在第三步骤中,将“调暗光”信号提供至车载数据收集单元且例如使用中性密度(nd)滤光器或类似者将杂散光源调暗,且再次将车载相机曝露于调暗光达几秒钟。在最后步骤中,将“结论测试”信号提供至车载数据收集单元,且阻止扩展光源曝光相机,例如,可关闭或关上光源。杂散光校准测试可在相对于相机的角度范围内重复,且可针对车辆的每个车载相机重复。
24.杂散光测试车
25.图1a是示例环境100的框图,其中杂散光测试车102可用于表征车辆106的车载相机104的性能。杂散光测试车102包括光学组件108、可移动框架110和护罩机构112。
26.车辆106可以是商用或非商用车辆,例如,汽车、卡车、公共汽车、平板车、拖车或在道路上操作的另一台重型机械。例如,车辆106可为汽车。在另一示例中,车辆106可为公共交通车辆,例如公共汽车。车辆106可为自主或半自主车辆且包括车载监视(surveillance)装置,例如光检测和测距(lidar)系统、车载相机、红外相机、传感器、全球定位系统(gps)、遥测装置等。
27.车载相机模块104是安装于车辆106上的相机且可被定位以记录车辆106的外部环境的至少部分视图。一般而言,车载相机模块包括一个或多个图像传感器和使光成像至(多个)传感器上的光学部件。在一些实施例中,例如,车载相机可包括全景透镜组件以提供大视场。车辆106的车载相机模块104安装于车辆106的车顶上且可提供围绕车辆106的环境的180度视角。更一般而言,车载相机模块可包括仪表板相机或安装于车辆的其他外表面上的相机。
28.光学组件108沿由镜头筒118部分包封的光学路径116提供空间扩展光源。空间扩展光源是与点状相对的具有有限大小的光源,且对向于给定角度。一般而言,在模型化或模拟时,应将空间扩展光源视为横向分开的多个非相干点光源,而非单一点光源。当杂散光测试车102相对于相机104和车辆106对准时,光学路径116与车载相机104的视场117对准。光学组件包括光源和光学部件,其细节将参考图2a至图2b进一步详细描述。
29.可移动框架110支撑光学组件108且包括用于导引杂散光测试车102相对于车辆106上的车载相机104的定位的一个或多个可调整对准特征元件114。使用可调整对准特征元件位置114将杂散光测试车102相对于车载相机104定位包括将光学组件108的光学路径116定位于车载相机的视场117内,如下文参考图2a至图2b进一步详细描述的。
30.可调整对准特征元件114包括保险杆(bumper)或框架110上的其他物理触点,其可用于相对于相机104和车辆106对准框架110。可调整对准特征元件114可包括框架110上的
可调整点,其可改变框架110的一个或多个尺寸,例如,升高/降低光学组件108相对于地面的位置。
31.可移动框架110包括支撑件120,例如,以将光学组件108固定至可移动框架110,以将可调整对准特征元件114固定至框架110和/或稳定框架110。例如,支撑件120可包括角托架、l形托架或类似者。框架110、支撑件120、对准特征元件114和杂散光测试车102的其他部件可由金属(例如,铝、钢等)和/或塑料材料构造。
32.可移动框架110被配置为可通过在车轮122上滚动框架110而移动以将杂散光测试车102定位成邻近于车辆106。框架110可由人类操作者手动定位,其中人类操作者可在车轮122上滚动框架110以使框架110相对于车辆106的相机104对准。
33.在一些实施方案中,可移动框架110可使用线性运动致动器、伺服马达或用于相对于车辆定位框架的其他机电辅助装置而自动或半自动地定位。框架110的定位可通过控制器利用一个或多个传感器来确定框架110相对于车辆106的位置来控制。框架110的半自动定位可包括用以辅助人类操作者移动和定位框架110的电驱动和提升机构。
34.可以由可调整对准特征元件114辅助框架110相对于车辆106的相机104的对准,其中杂散光测试车102的对准包括相对于车辆106上或邻近于车辆106的一个或多个点定位可调整对准特征元件114中的一个或多个。可调整对准特征元件114可为保险杆或其他触点,其中当杂散光测试车102相对于车辆106对准时,框架与车辆106物理接触。
35.可调整对准特征元件114可以是可调整的,例如使得杂散光测试车102与多个不同车辆106(例如,车辆106的不同品牌/年限/型号)兼容。可调整对准特征元件114的位置可在一个或多个维度上被调整。例如,保险杆可调整对准特征元件114的位置可相对于杂散光测试车102改变,例如,当例如杂散光测试车102用于测试轿车或小型货车的相机104时,距框架110的距离124可延长/缩短。在另一示例中,保险杆可调整对准特征元件114的位置可相对于地面在高度126上升高/降低。
36.可调整对准特征元件114可用于调整框架110中的一个或多个尺寸。例如,对准构件128可用于升高和降低框架110,使得光学组件108相对于地面升高/降低。可调整对准特征元件114可包括框架110的拆卸点,例如,使得杂散光测试车102可移动通过窄区域,例如,门框架。
37.在一些实施方案中,可调整对准特征元件114可用于调整框架110,使得杂散光测试车可用于测试位于车辆106上不同点处的相机104。例如,相机104可位于车辆106的车顶的顶部上,如图1a和图1b中所描绘的。在另一示例中,相机104可位于保险杆或车辆106的一侧上。可调整对准特征元件114可用于调整框架110中的一个或多个尺寸,例如,调整光学路径116的位置,和/或调整一个或多个保险杆或其他触点的位置以使光学路径116与相机104对准。
38.在一些实施方案中,可调整对准特征元件114可为无接触对准特征元件114,例如,接近传感器,其提供针对框架110相对于车辆106和相机104的相对位置的对准反馈。接近传感器数据可用于向人类操作者提供对准反馈,例如音频反馈、文本反馈、触觉反馈、视觉反馈或类似者。在一个示例中,框架110上的接近传感器可确定框架110何时相对于车辆106和相机104对准且经由音频扬声器提供一系列啁啾(chirp)以向人类操作者指示框架110正确定位。
39.在一些实施方案中,可调整对准特征元件114可以是用于杂散光测试车102的自动定位系统的部分,其中自动定位系统需要来自人类操作者的最少干预或无干预以相对于车辆106定位框架110。自动定位系统可以是杂散光测试车102的自动化实施例的一部分,其中在杂散光测试过程期间,人类操作者与杂散光测试车102具有最少交互或无交互。
40.无接触对准特征元件114可由线性或旋转运动致动器在自动或半自动对准过程中使用以将框架110相对于车辆106和相机104对准。例如,接近传感器可向操作定位车轮122的伺服马达的控制系统提供接近数据。
41.护罩机构112可为挡板、遮光帘或圆顶形状中的一个或多个且可由可调整臂130附接至框架110。在一些实施方案中,护罩机构112可包括夹具点(fixture point)(例如磁体)以将护罩机构附接在车辆106上的相机104上方。在一个示例中,且如图1a中所描绘的,护罩机构112是可定位于相机104上方的可调整臂130上的圆顶形结构。在另一示例中,护罩机构112是遮光帘,其可通过使用并入(例如,缝入、胶合、铆接等)至遮光帘中的磁体而在相机104周围暂时附接至车辆106的车体。在又一示例中,护罩机构112是可挠性挡板,其可定位成覆盖包括相机104的视场117的相机104的区域。护罩机构的进一步细节在下文参考图1b描述。
42.设备102包括控制器132,该控制器可与光学组件108数据通信且控制光学组件108的一个或多个操作。例如,控制器132可操作来自光学组件的光源,例如,开启/关闭光源,调整光源的强度,调整光学组件108的一个或多个光学部件等。
43.在一些实施方案中,控制器132可与用于车载相机104的数据收集单元数据通信。如参考图3进一步详细描述的,使用杂散光测试车102的杂散光测试的过程可包括在各种杂散光条件下的记录相机104性能。控制器132可将测试信息提供至车载数据收集单元133(例如与相机104数据通信的车载计算机)以记录在测试过程期间与杂散光测试车102的操作有关的细节。
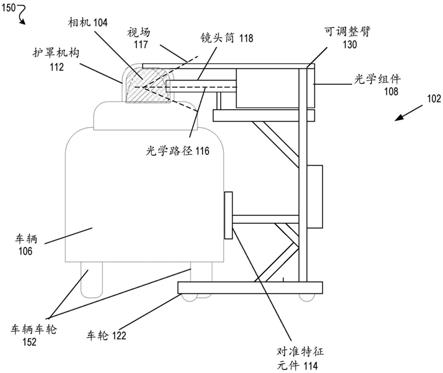
44.图1b是其中部署杂散光测试车102的另一示例环境150的框图。在图1b中,杂散光测试车102处于操作模式中,其中杂散光测试车102与车辆106的相机104对准且护罩机构112被部署。在一些实施方案中,部署护罩机构112包括移动(例如降低)可调整臂130以将护罩机构112定位于相机104上方。
45.如图1b中所描绘的,杂散光测试车102相对于车辆106上的相机104对准,使得经由光学组件108的镜头筒118的光学路径116与相机104的视场117对准。如所对准的,可调整臂130上的护罩机构112定位于框架110上,使得车载相机104的环境光曝露低于阈值。将环境光降低至低于阈值可以是将环境光曝露的测量降低至低于全部环境光曝露的90%。将环境光降低至低于阈值可以是在特定固定曝光时间内将环境光曝露降低至小于相机104的传感器的动态范围的25%。阈值测量可被定义为在特定固定曝光时间内低于例如相机104的传感器的动态范围的25%的信噪比或“暗量测”。背景图像可由相机104在环境光关闭的情况下捕获且从由相机在环境光曝露的情况下捕获的图像减去。选择信噪比可部分地基于相机104的可用动态范围,其中由环境光消耗的动态范围的量限制杂散光测量的灵敏度。
46.在一些实施方案中,当杂散光测试车102相对于车辆106上的相机104对准时,杂散光测试车102的一部分被定位于车辆106下方,例如,车轮122可被定位于车辆106下方,在车辆106的车轮152之间。当杂散光测试车102相对于车辆106上的相机104对准时,一个或多个
可调整对准特征元件114可与车辆106接触,例如与车辆106的一侧接触的保险杆。
47.图2a是用于杂散光测试车的示例光学组件202的框图200。光学组件202(例如,图1a和图1b中的光学组件108)包括外壳(enclosure)204,该外壳可如图1a和图1b中所描绘的那样附接至框架110。外壳204可以是例如金属外壳(例如由铝制成)或塑料外壳。光学组件包括光源206,例如,发光二极管(led)广谱6500k光源、氙气灯泡、红外850nm光源、高光谱光源或类似者。在一些实施方案中,光源206被包括于外壳204内或在外壳204的外部附接至杂散光测试车102的框架110。液体光导管208将从光源206输出的光引导至光学部件210。
48.光学部件210包括光阑212、滤光器214和离轴抛物面镜216。各个光学部件210的材料可部分地基于使用杂散光测试车102测试的光的波长范围而选择。例如,光学部件210可被选择用于450nm至20μm的宽带的最佳性能。
49.在一些实施方案中,光阑212是固定光阑以设定从液体光导管208出射的波束218的光斑大小。在一个示例中,光阑212具有由以下确定的直径:
50.d=2ftan0.25
°
d=2ftan0.25
°ꢀꢀꢀꢀꢀ
(1)
51.其中d是光阑的直径,且f是离轴抛物面镜216的焦距。光阑的直径d的范围可例如从直径1mm至10mm,例如约2mm、约5mm等。
52.滤光器214是用于改变透射光的光学滤波器。滤光器214可以是例如中性密度(nd)滤光器、带通滤光器、干涉滤光器、二向色性滤光器、吸收性滤光器等。在一些实施方案中,多个滤光器214被包括于可调整滤光器轮中,其中多个滤光器214中的特定滤光器214可定位于波束218的路径内。在一个示例中,多个nd滤光器214(例如光学密度(od)0、1、2、3、4、5和6)可被选择,使得可将波束218调整为具有在光输出强度范围内的可变强度。
53.离轴抛物面(oap)镜216相对于波束218定位,使得波束218过填充离轴抛物面镜216并产生准直波束220,该准直波束是无限远处的空间扩展光源。在一些实施方案中,无限远处的空间扩展光源可具有0.5
°
的角度范围。oap镜216可被定向成离轴大于15
°
度,例如离轴30
°
度或更大、60
°
度或更大(诸如离轴90
°
度)。
54.准直波束220出射外壳204并穿过镜头筒222。波束220可具有(例如,范围在25mm至100mm之间)的波束宽度224。在一个示例中,光束宽度是1.5英寸。镜头筒222可具有直径范围,其中镜头筒222的直径大于波束宽度220。镜头筒222可具有例如范围从30mm至105mm的直径。在一个示例中,镜头筒222具有2英寸的直径。镜头筒222定位于外壳204的出口处,使得波束220的光学路径226与镜头筒222的长度平行地对准。
55.可通过相对于车辆上的相机定位杂散光测试车102来将光学路径226引导至受测试的相机的视场中。图2b是用于杂散光测试车的示例护罩机构252的框图250。
56.如图2b中所描绘的,护罩机构252被定位以将环境光降低至低于阈值。护罩机构252可例如使用可调整臂(例如可调整臂130)来定位。来自光学组件202的波束220沿光学路径226穿过镜头筒222并进入车辆258的车载相机256的视场254中。
57.在一些实施方案中,可例如通过调整光学组件202相对于相机256的视场254的位置而在入射角范围内调整来自光学组件202的波束220的光学路径226。例如,相机256可为广角相机,使得在杂散光测试车102的杂散光条件下相机256的性能需要在波束220沿光学路径226至相机256上的入射角范围内测试。
58.尽管上文被描述为包括安装于车轮122上的框架110的杂散光测试车102,但其他
实施例是可能的。在一个实施例中,杂散光测试车102可为固定的(例如,安装于测试区域的底板、顶板和/或壁上的固定框架结构),其中车辆106可邻近于杂散光测试车102行驶或行驶通过杂散光测试车102。在一个示例中,杂散光测试车102可顶置(ceiling mounted)于测试区域中(例如在仓库环境中),其中车辆106在杂散光测试车102下方行驶以使车辆106的一个或多个车载相机104的性能在杂散光条件下被测试。在另一示例中,杂散光测试车102包括框架110,该框架是车辆106行驶通过其以在杂散光条件下测试车载相机104的性能的弧状结构。在另一示例中,杂散光测试车102的框架110是固定的且车辆106可例如使用可旋转大转盘结构相对于杂散光测试车102定位。
59.杂散光测试的示例过程
60.图3是用于利用杂散光测试车来表征车辆的车载相机的性能的示例过程300的流程图。如上文参考图1b所描述的,使用一个或多个可调整对准特征元件114将杂散光测试车102与车载相机104对准(302)。杂散光测试车102的对准可包括将杂散光测试车102的一个或多个物理对准特征元件(例如保险杆)定位成与车辆106物理接触。杂散光测试车102的对准可包括调整车102的一个或多个尺寸,例如,升高/降低光学组件108相对于相机104的相对位置,使得光学路径116在相机104的视场117内。
61.护罩机构112相对于相机104定位,使得相机104的环境光曝露低于阈值(304)。在一个示例中,阈值可以是环境曝露减少范围从75%至99%(例如约90%)的量。在另一示例中,阈值是对应于将环境光降低至低于相机104的动态范围的25%的信噪比,例如4:1信噪比。例如,可以使用可调整臂130来定位护罩机构。可使用附接点(例如,使用磁体等)来定位护罩机构并使其暂时固定至车辆106和/或相机104。
62.选择来自光源(例如,空间扩展光源)的多个可能光强度中的特定光强度(306)。可例如使用nd滤光器或另一形式的波束强度衰减来选择特定光强度。在一个示例中,可使用具有4.0的光学密度值的nd滤光器来衰减光强度。在另一示例中,可使用具有1.0的光学密度值的nd滤光器来衰减光强度。在又一示例中,可通过将光源功率调整5%或更大、50%或更大、或75%或更大等来衰减光强度。
63.相机曝露于光源的特定光强度(308)。参考图1a和图1b,在曝光之前,可将测试启动信号提供至相机104的车载数据记录装置(例如,车辆106上的车载计算机)。例如,可向相机104的车载数据记录装置提供“现在测试”对话。在一些实施方案中,控制器132可将测试启动信号提供至相机104的车载数据记录装置。
64.例如,如图2a和图2b中所描绘的,来自光学组件202的扩展光源可通过开启光源(例如光源206)而曝露于相机104。在一些实施方案中,来自光学组件202的扩展光源可通过开启快门(例如开启光阑212)、移除光束挡块(例如,作为滤光器轮214的部分)或波束220的另一偏转而曝露于相机256。
65.由相机捕获光源的成像数据(310)。入射于相机256上的曝光可例如持续几秒钟。图像数据可由相机256收集并例如使用车载数据记录装置来记录。图像数据可包括测量杂散光相对于相机256的二维图像的像素的相对强度。
66.在针对特定光强度收集图像数据之后,可例如使用快门或其他偏转方法来阻止波束220到达相机256。可例如使用不同滤光器214和/或将光源206的强度调暗来选择多个光强度中的下一个光强度进行测试。例如,可使用滤光器轮将光学密度3.0nd滤光器214插入
至波束218中以减小光源206的光强度。
67.可将与特定光强度有关的数据(例如,正在使用的特定nd滤光器或光源的强度降低)通信至相机256的车载数据记录装置以作为元数据与针对特定光强度的所收集的成像数据合并。在一些实施方案中,元数据包括受测试的光的(多个)波长。
68.在一些实施方案中,在收集下一光强度下的下一曝光之前,将调暗信号提供至相机256的车载数据记录装置,其中调暗信号可另外包括关于滤光器或光源的强度降低的信息供参考。例如,可向相机256的车载数据记录装置提供“以75%强度测试”对话。
69.使用以上步骤302至310中所描述的过程来测量来自多个可能光强度的多个不同光强度(312)。可通过使用各自具有不同光学密度值的多个经校准nd滤光器衰减光源的强度和/或降低相机的曝光来测量多个光强度。待测量的不同光强度的数目可以是例如四个或更多个不同光强度、两个或更多个不同光强度等。例如,若使用5.0的光学密度值的nd滤光器捕获1的相对强度,则可使用分别具有光学密度(od)1.0和od 0.0的nd滤光器来测量等于非衰减光源的10
‑4和10
‑5的相对强度的光源范围。
70.在以多个光强度中的每个光强度测量相机性能之后,可将测试结论信号提供至相机256的车载数据记录装置。例如,可向相机256的车载数据记录装置提供“结论测试”对话。
71.在多个强度中的每个强度曝露于相机256之后,基于捕获的图像确定性能度量(314)。性能度量表征在杂散光条件下相机的性能,例如眩光扩散函数。
72.相机的性能可通过抑制比(rejection ratio)量化,其中抑制比以低于原始光源强度的比率测量光的径向范围,例如,使用光源206的多个减小的强度。抑制比计算具有在由相机捕获的二维(2d)图像上高于指定相对强度的强度的光源的范围。可使用多个经校准nd滤光器和/或降低相机的曝光来衰减光源的强度。例如,若使用5.0的光学密度值的nd滤光器捕获1的相对强度,则可分别使用具有光学密度(od)1.0和od 0.0的nd滤光器来测量等于非衰减光源的10
‑4和10
‑5的相对强度下的光源的范围。将2d图像中光源的范围测量为距光源的中心点的最远范围的半径。抑制比测量可用于限定扩展光源抑制比(esrr)。
73.在一些实施方案中,可通过眩光扩散函数来量化相机的性能,该眩光扩散函数描述光源在相机104上方的空间效应,其中杂散光导致光源以高强度散布于相机104的图像传感器上方。通过例如使用具有不同光学密度的多个nd滤光器衰减光源来测量多个数量级的光强度。在每个衰减的光强度下捕获图像,并产生相对强度对比相机像素的曲线图(plot)。
74.基于过程300确定的性能度量可用于补偿在标称操作条件下车辆上的相机的杂散光条件。例如,当太阳在相机的视场内时,性能度量可用于补偿来自太阳的眩光。在另一示例中,例如当用于自主或半自主车辆的lidar系统在lidar检测中利用850nm光源时,性能度量可用于补偿由红外光源对相机造成的饱和。
75.可测量在杂散光条件下的相机104的性能以隔离特定角度的杂散光的起源。可通过利用设计选择(例如,通过调整挡板、将(多个)涂层涂敷于窗或其他光学表面、(多个)相机的清洁方法、(多个)相机的透镜设计和/或(多个)车用相机系统的其他相似设计和操作选择)来改善相机104的杂散光性能。
76.在一些实施方案中,可使用上文所描述的过程300来测量角度范围。例如,杂散光测试车102的对准可被调整以相对于以不同入射角测试的相机104(例如相机256)的视场117(例如视场254)定位光学路径116(例如光学路径226)。在一些实施方案中,可通过使用
光学组件108中的一个或多个旋转台来执行调整光学路径相对于相机的视场的入射角。
77.在一些实施方案中,车辆106包括多个相机104,其中每个相机104在杂散光条件下的性能可使用上文所描述的过程300表征。例如,车辆106可包括在车辆106的车顶上的相机104和在车辆106的前保险杆上的相机104。在每个相机的测试过程300之间,杂散光测试车中的一个或多个可调整对准特征元件114可被调整以将杂散光测试车102对准于车辆上的多个相机104中的正在测试的特定相机104。
78.在一些实施方案中,可使用杂散光测试车102来测试在多个光源的杂散光条件下的相机的性能。例如,图2a的光源可包括多个不同光源,例如,宽带6500k光源和红外850nm光源可被并入至光源206中,其中每个光源继而可用于光学组件202中,例如,其中液体光导管208可被调整以将来自不同光源的光引导至光学部件210中或可将不同液体光导管208用于每个光源206以将正在使用的光源206引导至光学部件210中。
79.本说明书中所描述的主题内容和操作的实施例可在数字电子电路中实施,或在计算机软件、固件或硬件中实施,包括本说明书中所公开的结构和其结构等效物,或以它们的一个或多个的组合实施。本说明书中所描述的主题内容的实施例可被实施为一个或多个计算机程序(即,计算机程序指令中的一个或多个模块),编码于计算机存储介质上用于由数据处理设备执行或控制数据处理设备的操作。
80.计算机存储介质可以是计算机可读存储装置、计算机可读存储基板、随机或串行存取存储器阵列或装置或它们中的一个或多个的组合,或被包括于其中。而且,尽管计算机存储介质并非传播信号,但计算机存储介质可以是编码于人工产生传播信号中的计算机程序指令的源或目的地。计算机存储介质也可以是一个或多个单独物理部件或介质(例如,光盘(cd)、磁盘或其他存储装置),或包括于其中。
81.本说明书中所描述的操作可被实施为由数据处理设备对存储于一个或多个计算机可读存储装置上或从其他源接收的数据执行的操作。
82.术语“数据处理设备”涵盖用于处理数据的所有类型的设备、装置和机器,包括(通过示例)可编程处理器;计算机;芯片上系统;或前述的任何数目或组合。该设备可包括专用逻辑电路,例如fpga(现场可编程门阵列)或asic(专用集成电路)。除硬件外,该设备还可包括为所讨论的计算机程序创建执行环境的程序代码,例如,构成处理器固件、协议堆栈、数据库管理系统、操作系统、跨平台运行时环境、虚拟机或它们中的一个或多个的组合的代码。该设备和执行环境可实现各种不同计算模型基础设施,诸如网络服务、分布式计算和网格计算基础设施。
83.计算机程序(也被称为程序、软件、软件应用、脚本或代码)可以任何形式的编程语言(包括编译或解释语言、宣告或程序语言)编写,且其可以任何形式部署,包括作为独立程序或作为模块、部件、子例程、对象或适用于计算环境中的其他单元。计算机程序可(但无需)对应于文件系统中的文件。程序可存储于保存其他程序或数据的文件的一部分中(例如,存储于标记语言文档中的一个或多个脚本)、专用于所讨论程序的单一文件中或多个调协文件(例如,存储代码的一个或多个模块、子程序或部分的文件)中。可部署计算机程序以在一个计算机上执行,或在位于一个位点处或跨多个位点分布并通过通信网络互连的多个计算机上执行。
84.本说明书中所描述的过程和逻辑流程可由一个或多个可编程处理器执行,该一个
或多个可编程处理器执行一个或多个计算机程序以通过对输入数据进行操作并产生输出来执行动作。过程和逻辑流程也可由专用逻辑电路执行,且设备还可被实施为专用逻辑电路,例如fpga(现场可编程门阵列)或asic(专用集成电路)。
85.通过示例,适于执行计算机程序的处理器包括通用和专用微处理器和任何种类的数字计算机的任何一个或多个处理器。一般而言,处理器将从只读存储器或随机存取存储器或两者接收指令和数据。计算机的基本元件是用于根据指令执行动作的处理器和用于存储指令和数据的一个或多个存储器装置。一般而言,计算机还将包括或可操作地耦合以从用于存储数据的一个或多个大容量存储装置(例如,磁盘、磁光盘或光盘)接收数据或将数据传输至该一个或多个大容量储存装置或两者。然而,计算机无需具有此类装置。此外,计算机可被嵌入另一装置中,例如,移动电话、个人数字助理(pda)、移动音频或视频播放器、游戏机、全球定位系统(gps)接收器或可携式存储装置(例如,通用串行总线(usb)闪驱),仅举几例。适于存储计算机程序指令和数据的装置包括所有形式的非易失性存储器、介质和存储器装置,包括例如半导体存储器装置,例如,eprom、eeprom和闪存装置;磁盘,例如内部硬盘或可移磁盘;磁光盘;和cdrom和dvd
‑
rom盘。处理器和存储器可由专用逻辑电路补充或被并入于专用逻辑电路中。
86.为提供与用户的交互,本说明书中所描述的主题内容的实施例可在计算机上实施,该计算机具有用于向用户显示信息的显示设备(例如crt(阴极射线管)或lcd(液晶显示器)监视器)和用户可通过其向计算机提供输入的键盘和指向装置(例如鼠标或轨迹球)。其他种类的装置也可用于提供与用户的交互;例如,提供给用户的反馈可为任何形式的感觉反馈,例如视觉反馈、听觉反馈或触觉反馈;且可以任何形式接收来自用户的输入,包括声音、语音或触觉输入。另外,计算机可通过向由用户使用的装置发送文档以及从由用户使用的装置接收文档来与用户交互;例如,通过响应于从网页浏览器接收的请求,将网页发送至用户的用户装置上的网页浏览器。
87.本说明书中所描述的主题内容的实施例可在计算系统中实施,该计算系统包括后端部件(例如,作为数据服务器),或包括中间件部件(例如,应用服务器),或包括前端部件(例如,具有图形用户接口或网页浏览器的用户计算机,用户可通过该用户计算机与本说明书中所描述的主题内容的实施方案交互),或一个或多个这样的后端、中间件或前端部件的任何组合。系统的部件可通过任何形式或介质的数字数据通信(例如通信网路)互连。通信网路的示例包括局域网(“lan”)和广域网(“wan”)、互联网(例如因特网)和点对点网络(例如自组织点对点网络)。
88.计算系统可包括用户和服务器。用户和服务器通常彼此远离且通常透过通信网路交互。用户和服务器的关系凭借在各自计算机上运行并彼此具有用户
‑
服务器关系的计算机程序产生。在一些实施例中,服务器将数据(例如html页面)传输至用户装置(例如,出于向与用户装置交互的用户显示数据和从该用户接收用户输入的目的)。可在服务器处从用户装置接收在用户装置处产生的数据(例如,用户交互的结果)。
89.尽管本说明书含有许多特定实施方案细节,但这些不应被解释为对任何特征或可要求保护的内容的范围的限制,而是应被解释为对特定于特定实施例的特征的描述。在本说明书中在分开的实施例的上下文中所描述的某些特征也可在单个实施例中组合实施。相反,在单个实施例的上下文中描述的各种特征也可分开地在多个实施例中或以任何合适子
组合实施。此外,尽管以上可将特征描述为以某些组合起作用且甚至最初要求如此保护,但在一些情况下,可从组合剔除来自要求保护的组合的一个或多个特征,且所要求保护的组合可以针对子组合或子组合的变体。
90.类似地,虽然在附图中以特定顺序描绘操作,但是这不应被理解为要求以所展示的特定顺序或以依次顺序执行这样的操作,或执行所有所图示的操作以达成期望的结果。在某些情况下,多任务和并行处理可为有利的。此外,上文所描述的实施例中的各种系统部件的分离不应被理解为在所有实施例中均需要此分离,且应理解,所描述的程序部件和系统通常可一起集成于单一软件产品中或封装至多个软件产品中。
91.因此,已描述本主题内容的特定实施例。其他实施例在所附权利要求的范围内。在一些情况下,权利要求中所述的动作可以不同顺序执行,且仍达成期望的结果。另外,附图中所描绘的过程并不一定需要所展示的特定顺序或依次顺序来达成期望的结果。在某些实施方案中,多任务和并行处理可以是有利的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。