1.本发明属于水底探测技术领域,具体涉及到一种用于水底沉埋金属目标的探测器。
背景技术:
2.水下沉底金属探测器的应用领域较多,如水下沉船探测、水下沉埋管状典型金属目标探测、水下金属线缆探测,以及水下金属物证目标搜寻等应用。
3.现有市场上的水下金属探测器采用磁梯度原理或电磁脉冲感应方式的探测器,磁梯度原理的磁探测器主要用于水底大型磁性目标的探测应用,通过磁性目标对地球磁力线的扰动探测,实现水下金属目标探测,不能用于非磁性目标的探测;电磁脉冲感应方式的探测器通过产生主动电磁脉冲探测信号搜寻金属目标,电磁脉冲感应方式的探测器的原理是采用电磁线圈发射电磁探测信号和多个线圈检测电磁信号,通过电磁目标反射的幅度信号变化确认水下金属目标,并估计方位和距离,特点是体积较大,只能用搭载能力强的水下机器人搭载并需要近水底探测,如采用拖曳探测,则拖曳产生的振动会影响探测效果,成本较高,使用较麻烦。
技术实现要素:
4.本发明所要解决的技术问题在于克服上述现有技术的缺点,提供一种结构简单、体积小、重量轻,安全可靠,使用方便,探测效果好的用于水底沉埋金属目标的探测器。
5.解决上述技术问题所采用的技术方案是:在拖动设备上通过拖曳装置与检测装置联接,水下有水底沉埋金属目标,拖动设备上设置有光学观察器、声探测器、应答声信标、高度仪、信号处理与结果显示设备,所述的拖曳装置为:连接支架的一端与拖动设备联接、另一端与至少一个浮体球联接,浮体球通过载重拖曳线缆与无磁性倾斜重物杆的一端联接,无磁性倾斜重物杆两端分别设置有姿态传感器,无磁性倾斜重物杆的另一端通过转接线缆与检测装置联接;所述的检测装置为:转接线缆通过水密连接器与第一电极的输入端联接,移动在海床上的第一电极的输出端通过水密连接器与电极连接线缆联接,电极连接线缆通过水密连接器与移动在海床上的第二电极的输入端联接。
6.本发明的无磁性倾斜重物杆的中心线与海床的水平面之间的夹角为30
°
~70
°
。
7.本发明的第一电极的中心线与第二电极的中心线之间距离等于第一电极的中心点与水底沉埋金属目标的中心点之间距离的2~4倍。
8.本发明的第一电极的中心线与第二电极的中心线之间距离等于第二电极的中心点与水底沉埋金属目标的中心点之间距离的2~4倍。
9.本发明的拖动设备为水下机器人或水面船。
10.本发明采用了第一电极、第二电极与水介质构成电回路,在水中第一电极与第二电极之间产生固定的电场空间分布,当第一电极与第二电极附近空间存在水底沉埋金属目标时或附近存在金属目标时,使水介质空间的电阻发生变化,从而使稳定分布的空间电场
产生变化,对检测信号进行对比分析处理后,能够确定电极附近是否存在水底沉埋金属目标,并通过信号处理与结果显示设备显示目水底沉埋金属目标的位置和探测结果。本发明具有结构简单、安全可靠、重量轻、探测效果好的优点,本发明适用于各类水下机器人或是浅水时水面船拖曳搭载,本发明适用于水下机器人拖曳探测磁性和非磁性金属目标,浅水时可以用水面船拖曳探测水底磁性和非磁性金属目标。
附图说明
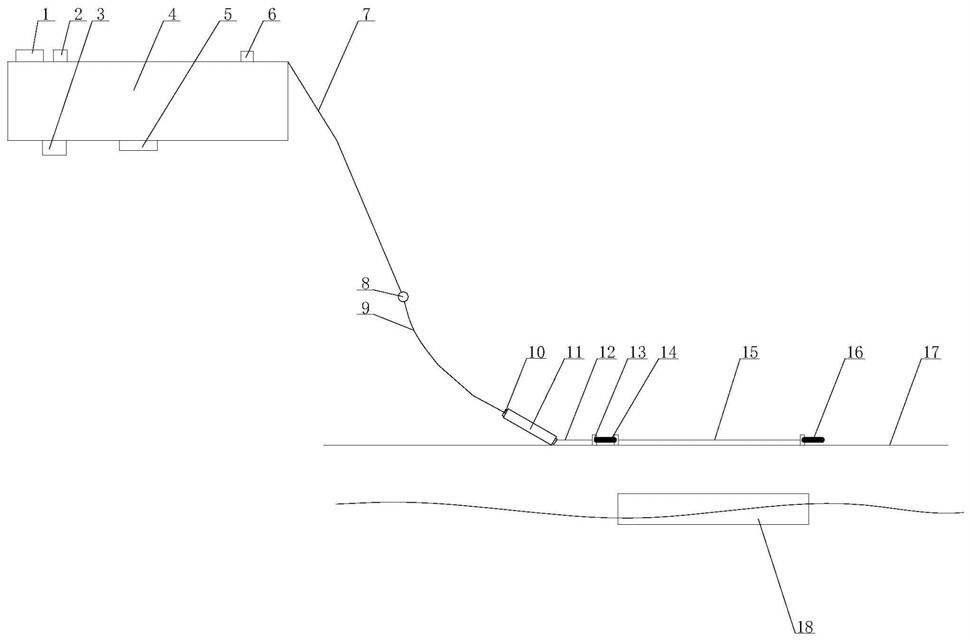
11.图1是本发明一个实施例的结构示意图。
12.图中,光学观察器1、声探测器2、应答声信标3、拖动设备4、高度仪5、信号处理与结果显示设备6、连接支架7、浮体球8、载重拖曳线缆9、姿态传感器10、无磁性倾斜重物杆11、转接线缆12、水密连接器13、第一电极14、电极连接线缆15、第二电极16、海床17、水底沉埋金属目标18。
具体实施方式
13.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
14.如图1所示,本实施例的用于水底沉埋金属目标的探测器由光学观察器1、声探测器2、应答声信标3、拖动设备4、高度仪5、信号处理与结果显示设备6、拖曳装置、检测装置联接构成。
15.在拖动设备4上通过拖曳装置与检测装置联接,拖动设备4为水下机器人或水面船,拖动设备4上安装有光学观察器1、声探测器2、应答声信标3、高度仪5、信号处理与结果显示设备6,光学观察器1用于观察目标光图像,声探测器2用于探测高频图像声呐目标,光学观察器1与声探测器2用于水下机器人或水面船观察目标并避开障碍物。应答声信标3用于水面船超短基阵声呐给水下机器人应答式定位。高度仪5用于测试拖动设备4与水底之间距离,即拖动设备4与水底的高度。信号处理与结果显示设备6用于数据处理与结果显示。
16.拖曳装置由连接支架7、浮体球8、载重拖曳线缆9、姿态传感器10、无磁性倾斜重物杆11、转接线缆12联接构成,拖曳装置为:连接支架7的一端与拖动设备4联接、另一端与至少一个浮体球8联接,浮体球8通过载重拖曳线缆9与无磁性倾斜重物杆11的一端联接,浮体球8用于保证载重拖曳线缆9不下沉,无磁性倾斜重物杆11两端分别安装有姿态传感器10,无磁性倾斜重物杆11的中心线与海床17的水平面之间的夹角为30
°
~70
°
,姿态传感器10用于控制拖动设备4的高度和速度,使检测装置不脱离水底。无磁性倾斜重物杆11的另一端通过转接线缆12与检测装置联接,无磁性倾斜重物杆11具有较大的负浮力,无磁性倾斜重物杆11的一端用浮体球8包裹为正浮力,无磁性倾斜重物杆11一端在水下上浮、另一端为沉底的斜倾角状态,无磁性倾斜重物杆11的倾角用于控制拖动设备4的速度和高度,保证电偶极源的电极连接线缆15贴近海床17移动,利于探测水底的水底沉埋金属目标18。转接线缆12有较大的负浮力,转接线缆12在拖曳中保证电极连接线缆15位于海床17上。
17.所述的检测装置为:转接线缆12通过水密连接器13与第一电极14的输入端联接,移动在海床17上的第一电极14的输出端通过水密连接器13与电极连接线缆15联接,第一电
极14贴近海床17移动,有利于稳定电场空间分布。电极连接线缆15通过水密连接器13与移动在海床17上的第二电极16的输入端联接,通过以上连接方式能够方便更换第一电极14和第二电极16,第二电极16贴近海床17移动,有利于稳定电场空间分布。电极连接线缆15为耐磨的柔性护套线缆,在海底贴近海床17拖行移动,固定第一电极14和第二电极16之间距离,保证电场空间分布稳定。第一电极14的中心线与第二电极16的中心线之间距离等于第一电极14的中心点与水底沉埋金属目标18的中心点之间距离的2~4倍,第一电极14的中心线与第二电极16的中心线之间距离等于第二电极16的中心点与水底沉埋金属目标18的中心点之间距离的2~4倍,保证第一电极14与第二电极16之间产生足够强度的电流信号,保证探测器有足够的探测作用距离,产生的电流应大于1a。第一电极14和第二电极16组合构成的电偶极源在水中有固定的电场分布,第一电极14和第二电极16与水介质构成电回路,产生稳定的电场空间分布,第一电极14和第二电极16之间的邻近空间存在水底沉埋金属目标18时,水底沉埋金属目标18与水介质有较大的电阻率差异,从而使稳定分布的空间电场产生变化。当电偶极源附近空间存在金属目标时,金属目标与周围水介质有较大的电阻率差异,即电阻率变小,从而使稳定分布的空间电场产生变化。针对恒流信号场而言,当电流不变时,会产生电压下降情况;针对恒压信号源而言,当电压不变时会产生电流升高情况,对检测信号幅度进行分析处理,从而确定水底是否存在金属目标。同时第一电极14和第二电极16在使用中会产生表面钝化及氧化,影响电极与水的电回路电阻率,利用水底拖曳产生摩擦作用清理电极附着污物,有利于稳定第一电极14和第二电极16之间的电场分布。
18.本实施例的工作原理如下:
19.第一电极14与第二电极16设置在水底,第一电极14与第二电极16通过水下机器人或水面船沿水底拖曳控制和定位,第一电极14、第二电极16与水介质构成电回路,在水中第一电极14与第二电极16之间产生固定的电场空间分布,当第一电极14与第二电极16附近空间存在水底沉埋金属目标18时,使水介质空间的电阻发生变化,从而使稳定分布的空间电场产生变化,对检测信号进行对比分析处理,无水底沉埋金属目标21时的空间电场数据和有水底沉埋金属目标21的空间电场数据是不同的,通过比对有无金属目标时的电流或是电压数据差异大小,从而确定水底是否存在水底沉埋金属目标18,第一电极14与第二电极16施加直流信号或是交流信号,频率在500hz内,通过施加不同的信号来辨识不同的金属目标,并通过信号处理与结果显示设备6显示目水底沉埋金属目标18的位置和探测结果。
20.以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。