1.本发明主要涉以及一种使入射的光偏转且反射的光反射装置。
背景技术:
2.过往,沿直线状的扫描线扫描来自光源的光的技术,已广泛应用于激光加工装置和图象形成装置等。专利文献1以及2公开了这种装置所具备的装置。
3.专利文献1的反射镜旋转装置,具备投光手段以及光反射手段。投光手段具备反射镜旋转装置,该反射镜旋转装置具有多个配置为正多边形的平面反射镜,且通过旋转的反射镜旋转装置中的一个平面反射镜反射自既定的方向入射的光,该平面反射镜旋转装置一边以等速进行角移动一边放射光。光反射手段,通过多个反射部反射自投光手段放射的光,将光引导至既定的扫描线上的任意的被照射点上。
4.专利文献2的多面镜旋转装置,具备投光手段以及光反射手段。投光手段具有多面镜,且通过以旋转的多面镜的正多边形的各边的反射面反射自既定的方向入射的光,该多面镜一边以等速进行角移动一边放射光。光反射手段,通过多个反射部反射自投光手段放射的光,将光引导至既定的扫描线上的任意的被照射点上。
5.关于专利文献1的反射镜旋转装置,在仅具有反射镜旋转装置的投光手段中,该反射镜旋转装置的各平面反射镜上的光的反射位置会伴随反射镜旋转装置的旋转而变动,进而产生扫描的畸变失真等。另外,关于专利文献2的多面镜旋转装置,在仅具有多面镜旋转装置的投光手段中,该多面镜的正多边形的各边的反射面上的光的反射位置会伴随多面镜的旋转而变动,进而产生扫描的畸变失真等。
6.因此,专利文献1的反射镜旋转装置,具备依序使平面反射镜往返运动的往返运动机构,且通过使平面反射镜往返运动,抑制光的反射位置变动。另外,专利文献2的多面镜旋转装置,具备能够旋转地支撑多面镜的支撑部件、以及使该支撑部件往返运动的往返运动机构,且通过使多面镜与该支撑部件一起往返运动,抑制光的反射位置变动。
7.另外,作为如前述的装置,还知一种具备振镜反射镜(galvano mirror)的装置,该振镜反射镜具备使可动部往返摆动运动的构成,该可动部具备反射镜。在该装置中,通过一边调整摆动速度一边使振镜反射镜的可动部摆动,能够防止光的反射位置变动。
8.[现有技术文献]
[0009]
[专利文献]
[0010]
专利文献1:日本特开2018
‑
105903号公报
[0011]
专利文献2:日本特开2018
‑
97055号公报
技术实现要素:
[0012]
发明所要解决的技术问题
[0013]
在所述专利文献1的反射镜旋转装置和专利文献2的多面镜旋转装置中,虽然能够抑制光的反射位置变动,但不能完全防止。另外,在具备振镜反射镜的装置中,为了防止光
的反射位置变动,需要在振镜反射镜的可动部的摆动时使该可动部加速或减速,因此该装置所扫描的扫描区域变窄,且被光照射的被照射物的能加工范围减小。
[0014]
为此,本发明的目的在于,在使自既定的方向入射的光偏转的装置中,防止光的反射位置变动,且不用减小被光照射的被照射物的能加工范围。
[0015]
解决问题所使用的技术方案
[0016]
本发明所欲解决的问题诚如以上说明,下面对用以解决该问题的手段以及其功效进行说明。
[0017]
根据本发明的第一观点,提供以下结构的光反射装置。也就是说,光反射装置具备反射部件,该反射部件具有使入射光反射的平面状的反射面,且同时进行自转和公转。所述反射部件的自转方向与公转方向相同。所述反射部件的公转角速度等于自转角速度的2倍。
[0018]
根据本发明的第二观点,提供以下结构的光扫描装置。也就是说,光扫描装置具备旋转反射镜、驱动装置以及照射装置。所述驱动装置,使所述旋转反射镜旋转。所述照射装置朝所述旋转反射镜照射光。所述旋转反射镜,具备第一正多边形锥以及第二正多边形锥。所述第二正多边形锥,使其轴与所述第一正多边形锥的轴对齐,而与所述第一正多边形锥对置配置。所述第一正多边形锥以及所述第二正多边形锥的各侧面,是平面状的光反射面。在所述第一正多边形锥的第一底面以及所述第二正多边形锥的第二底面,正多边形的边的边数相等。所述第一底面以及所述第二底面,皆与所述轴垂直配置。所述第一正多边形锥与所述第二正多边形锥,使所述第一底面的正多边形的相位与所述第二底面的正多边形的相位相互一致,并且以所述轴作为旋转轴而通过所述驱动装置相互一体地旋转。其中,以包括该轴并且通过所述第一底面的正多边形的一边的中点的平面切断所述第一正多边形锥时的底角为α
°
。以包括该轴并且通过所述第二底面的正多边形的一边的中点的平面切断所述第二正多边形锥时的底角为(90
‑
α)
°
。所述第一底面与所述第二底面间的距离,等于所述第一底面的正多边形的一边的中点与所述旋转轴间的距离乘以tanα的值、与所述第二底面的正多边形的一边的中点与所述旋转轴间的距离乘以tan(90
‑
α)的值的和。所述照射装置,将光照射至与所述旋转反射镜的旋转轴交叉的位置。
[0019]
由此,由于在反射部件上相对于入射光的光的反射位置变得恒定,因此能够防止光的反射位置变动。因此,能够防止进行扫描时的畸变失真。
[0020]
发明效果
[0021]
根据本发明,能够在使自既定的方向入射的光偏转的光反射装置中,防止光的反射位置变动。
附图说明
[0022]
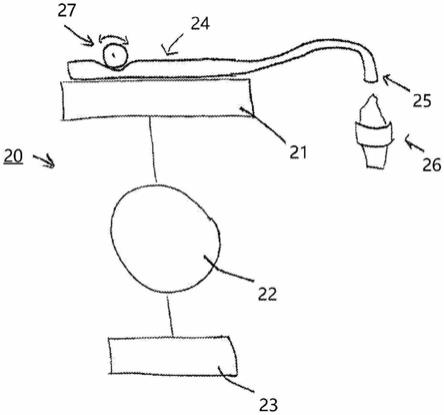
图1是显示具备本发明的第一实施方式的导光装置的激光加工装置的立体图;
[0023]
图2是显示导光装置具备一个反射单元的例子的示意图;
[0024]
图3是反射单元的立体图;
[0025]
图4是反射单元的剖视图;
[0026]
图5是说明反射部件在公转360
°
的期间自转180
°
的状况的图;
[0027]
图6是说明入射光被反射部件反射时的状况的图;
[0028]
图7是以垂直于反射部件的公转轴的平面切断反射单元的剖视图;
[0029]
图8是说明入射光照射在反射部件上的位置与公转的角度和自转的角度的关系的图;
[0030]
图9是显示反射单元的第一变形例的剖视图;
[0031]
图10是显示反射单元的第二变形例的剖视图;
[0032]
图11是显示在第二实施方式的导光装置中第一反射单元成为反射状态时的状况的图;
[0033]
图12是显示第一反射单元自图11的状态变为通过状态、且第二反射单元自图11的状态变为反射状态的状况的图;和
[0034]
图13是第三实施方式的旋转反射镜的立体图。
具体实施方式
[0035]
下面,参照附图说明本发明的实施方式。首先,参照图1,对具备本发明的第一实施方式的导光装置13的激光加工装置(光扫描装置)1的结构进行说明。图1是激光加工装置1的立体图。
[0036]
图1所示的激光加工装置1,能够通过对工件(被照射物)200一边照射激光光线一边进行光扫描而加工该工件200。
[0037]
在本实施方式中,激光加工装置1能够进行非热加工处理。非热加工具备例如烧蚀加工。烧蚀加工,通过将激光光线照射在工件200的一部分而使该工件200的一部分蒸发的加工。再者,激光加工装置1,也能够为进行热加工的构成、即利用激光光线的热量使工件200熔化而进行加工。
[0038]
工件200是板状部件。工件200例如由cfrp(碳纤维强化塑料)构成。再者,工件200不限于板状部件,例如也能够为块状部件。另外,工件200也能够由其他的材料构成。
[0039]
激光加工装置1中使用的激光光线,也能够为可视光、或者也能够为除了可视光以外的波长带的电磁波。另外,在本实施方式中,不仅将可视光,而且将包括较其宽的波长带的各种电磁波在内也称作为“光”。
[0040]
如图1所示,激光加工装置1具备运送部11、激光产生器12以及导光装置13。
[0041]
运送部11能够沿与激光加工装置1的主扫描方向大致正交的方向(副扫描方向)运送工件200。并且,通过运送部11一边运送工件200一边进行激光加工。
[0042]
在本实施方式中,运送部11是一带式输送机。再者,运送部11并无特别限制,也能够为辊式输送机、或把持工件200进行运送的结构。另外,也能够省略运送部11,而对固定不动的工件200照射激光光线以实施加工。
[0043]
激光产生器12是激光光线的光源,能够通过脉冲振荡产生短时宽的脉冲激光。脉冲激光器的时宽并无特别限制,例如为纳秒级、皮秒级或飞秒级等的短时间间隔。再者,激光产生器12,也能够为通过连续波振荡产生cw激光的构成。
[0044]
导光装置13以将激光产生器12产生的激光光线照射在工件200的方式进行引导。通过导光装置13引导的激光光线,照射在被界定于工件200的表面的扫描线201上的被照射点202上。详细容待稍后说明,工件200上的通过激光光线照射的被照射点202,通过导光装置13的动作以大致恒定的速度沿直线状的扫描线201移动。由此,能够实现光扫描。
[0045]
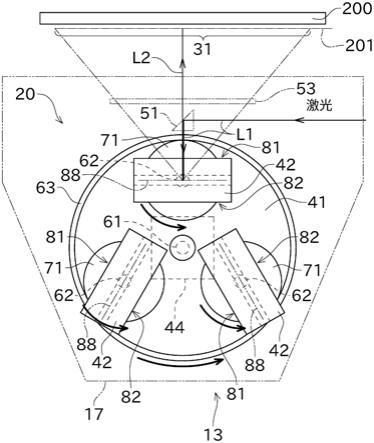
接着,参照图2,详细地说明导光装置13。图2是显示导光装置13的构成的示意图。
[0046]
如图2所示,导光装置13具备至少一个反射单元(光反射装置)20。在本实施方式中,导光装置13具备一个反射单元20。反射单元20,配置在导光装置13具备的壳体17的内部。
[0047]
当自激光产生器12出射的激光光线入射时,反射单元20反射该激光光线而朝工件200引导。下面的说明中,亦将自激光产生器12入射在反射单元20的激光光线称作为入射光。反射单元20,以与工件200间隔既定距离的方式配置。
[0048]
反射单元20能够通过反射入射光并使其偏转而进行光扫描。图1以及图2显示有扫描区域31,该扫描区域31,是通过反射单元20对工件200进行光扫描的区域。扫描线201是由扫描区域31构成。扫描区域31由反射单元20进行扫描。
[0049]
接着,参照图2至图4,详细地说明反射单元20。图3是反射单元20的立体图。图4是反射单元20的剖视图。
[0050]
如图2所示,反射单元20,具备支撑板(支撑部件)41、反射部件42、电机44、稜镜51以及扫描用透镜53。
[0051]
支撑板41是圆板状部件,且能相对于后述的壳体63旋转。第一旋转轴61能够旋转地被支撑在壳体63上。支撑板41固定在第一旋转轴61的一轴向端。电机44的输出轴连接在第一旋转轴61的另一轴向端。
[0052]
如图4所示,反射单元20,具备收容反射单元20的驱动传递机构的壳体63。壳体63固定在图2所示的壳体17的适宜部位。
[0053]
壳体63形成为使一轴向侧开放的中空圆筒形状。支撑板41以封闭壳体63的开放侧的方式配置。第一旋转轴61以贯穿壳体63的方式配置。
[0054]
反射部件42是形成为块状的部件。反射部件42能够相对于支撑板41旋转。第二旋转轴62能够旋转地被支撑在支撑板41上。第二旋转轴62朝向与第一旋转轴61平行的方向,且以贯穿支撑板41的方式配置。
[0055]
反射部件42隔着基部71以及第二旋转轴62而被支撑在支撑板41上。
[0056]
如图3所示,基部71形成为小圆板状。如图4所示,基部71固定在第二旋转轴62的一轴向端。第二旋转轴62的另一轴向端位于壳体63内部。
[0057]
所述反射部件42固定在基部71上。因此,反射部件42能与基部71以及第二旋转轴62一起旋转。
[0058]
反射部件42能够与支撑板41一起以第一旋转轴61为中心而旋转(公转),同时以第二旋转轴62为中心而旋转(自转)。下面的说明中,亦将第一旋转轴61的轴心称为公转轴,且将第二旋转轴62的轴心称为自转轴。再者,关于反射部件42的驱动机构,容待后述。
[0059]
在本实施方式中,具备3个反射部件42。3个反射部件42,配置在支撑板41的远离壳体63侧的面。
[0060]
如图2所示,3个反射部件42,在支撑板41上以均等地分割圆的方式配置,该圆以第一旋转轴61作为中心。具体而言,3个反射部件42,在支撑板41的圆周方向上以等间隔(120
°
的间隔)配置。
[0061]
反射部件42反射光且将光引导至扫描区域31。如图4所示,反射部件42具有第一反射部81以及第二反射部82。第一反射部81与第二反射部82,隔着第二旋转轴62(自转轴)成对地配置。
[0062]
若具体说明,反射部件42形成为长方体的块状。在该反射部件42中,第一反射部81配置在隔着自转轴而对置的2个面中的一面,且在另一面配置第二反射部82。第一反射部81与第二反射部82,相互对称地形成。
[0063]
详细容待稍后说明,但支撑板41的旋转角速度,以等于反射部件42的旋转角速度的2倍的方式被驱动。因此,在支撑板41旋转360
°
的期间,反射部件42旋转180
°
。
[0064]
当在沿自转轴的方向观察反射部件42时,第一反射部81与第二反射部82,以相互朝向相反侧的方式配置。
[0065]
图5显示了关注3个反射部件42中的一个反射部件42的情况下的该反射部件42的公转和自转的状况。为了便于理解反射部件42的方向,在图5中,对靠近第一反射部81侧的反射部件42的边缘部添加有阴影线。在图5中,反射部件42的公转方向以及自转方向,皆为逆时针方向。
[0066]
如图5所示,伴随支撑板41旋转360
°
,反射部件42与其连动而旋转180
°
。因此,反射部件42每公转360
°
即自转180
°
,以更换第一反射部81以及第二反射部82的方向。如此,支撑板41每旋转360
°
,则在第一反射部81与第二反射部82之间交互切换反射入射光的面。
[0067]
第一反射部81以及第二反射部82,分别具备第一反射面85以及第二反射面86。由于第一反射部81以及第二反射部82的构成基本相同,因此,下面的说明中以第一反射部81的结构为代表进行说明。
[0068]
以下进行具体说明,在反射部件42上形成有v字形截面的凹槽,该凹槽用以使远离自转轴侧开放。凹槽的长边方向朝向与自转轴垂直的方向。在该凹槽的内壁形成有第一反射面85以及第二反射面86。第一反射部81,由第一反射面85以及第二反射面86构成。
[0069]
第一反射面85以及第二反射面86,皆形成为平面状。第一反射面85,相对于与第二旋转轴62垂直的虚拟平面倾斜配置。第二反射面86,相对于与第二旋转轴62垂直的虚拟平面倾斜配置。
[0070]
如图6所示,第一反射面85以及第二反射面86,朝相反方向且以相等的角度θ(具体为45
°
)相对于与第二旋转轴62垂直的虚拟平面倾斜。因此,第一反射面85与第二反射面86,相对于与第二旋转轴62垂直的对称面87而对称形成。第一反射面85与第二反射面86,以形成90
°
角度的v字的方式配置。
[0071]
通过所述构成,被朝导光装置13引导的入射光,经由稜镜51被弯曲,然后沿第一光路l1朝接近反射单元20的方向行进。第一光路l1,朝向与反射部件42的公转轴的方向正交的方向。
[0072]
3个反射部件42,通过电机44驱动而进行公转和自转,以依序切断第一光路l1的方式移动。因此,3个反射部件42依序接触沿第一光路l1入射的入射光而使光反射。
[0073]
在公转的反射部件42来到最靠近第一光路l1的上游侧的位置的定时附近,第一反射部81或第二反射部82具有的第一反射面85,如图3所示以与第一光路l1重叠的方式配置。因此,入射光被第一反射面85反射,然后由第二反射面86反射。
[0074]
如图4所示,在入射光照射于反射部件42的状态下,若反射部件42进行公转和自转,则第一反射面85以及第二反射面86的方向连续变化。因此,自第二反射面86出射的光的方向,如图3中的空心箭头所示平滑地变化。如此,能够实现放射光的偏转。
[0075]
由于第一反射面85与第二反射面86配置为v字形,因此伴随反射部件42的公转和
自转,自反射部件42出射的出射光,沿与自转轴垂直的平面偏转。该平面相对于第一光路l1而朝第二旋转轴62(换句话说,第一旋转轴61)的方向偏移。由此,能够通过相对于第一光路l1而偏移的第二光路l2,将由第二反射面86反射的光朝工件200引导。
[0076]
入射光沿与自转轴以及公转轴垂直的方向入射在反射单元20。另外,当反射部件42的公转相位与入射光的方向完全一致时,若沿第二旋转轴62观察,第一反射面85以及第二反射面86与入射光正交。由此,此时入射光如图3所示以折返的方式通过反射部件42反射2次,且沿与第一光路l1的方向平行且相反方向的第二光路l2出射。
[0077]
如此,入射光通过第一反射面85以及第二反射面86反射而偏转。在此,如图6所示,考虑对称面87的相对于第一反射面85的镜像、以及对称面87的相对于第二反射面86的镜像。2个镜像皆成为位于反射部件42的内部的平面88。若以光路长的观点考虑,入射光通过第一反射面85以及第二反射面86一边偏移一边反射的情况、与入射光通过平面88反射但不产生偏移的情况等效。从这层意义上讲,能够说所述虚拟的平面88是形式上的反射面。
[0078]
从另一观点说明平面88。下面的说明中,将自入射光由第一反射面85反射后至被第二反射面86反射为止的光路称为中间光路l3。中间光路l3的二等分点位于对称面87上。
[0079]
如图6的虚线所示,考虑以自第一反射面85突入反射部件42的内部的方式延长入射光的第一光路l1的情况。将入射光的第一光路l1延长了中间光路l3的一半的长度d1的延长线76前端的点77位于平面88上。
[0080]
同样地,考虑以自第二反射面86突入反射部件42的内部的方式延长入射光的第二光路l2的情况。将入射光的第二光路l2延长了中间光路l3的一半的长度d1的延长线78前端的点79位于平面88上。
[0081]
图6显示第二光路l2的方向处于偏转角范围的中央的状态。然而,无论是在入射光通过反射部件42朝哪个方向偏转的情况,延长线76、78的前端始终位于平面88上。
[0082]
该平面88,也作为对称配置第一反射部81与第二反射部82的基准面。因此,虽然在图6中以与第一反射部81的关系显示平面88,但平面88在第一反射部81以及第二反射器82的双方属于共同。并且,在本实施方式中,反射部件42的自转轴(换句话说,第二旋转轴62的轴线),以包括在平面88内的方式配置。
[0083]
由此,通过反射部件42的第一反射部81以及第二反射部82使入射光偏转的情况,与将反射面配置在与反射部件42一起自转和公转的零厚度的平面88的表背面而使入射光偏转的情况实质上相同。图2显示自转和公转的反射部件42与平面88的关系。
[0084]
稜镜51由适宜的光学元件构成。稜镜51配置在第一光路l1上的较反射部件42的上游侧。通过该稜镜51,能够将来自激光产生器12的激光光线引导至反射部件42。
[0085]
扫描用透镜53是自由曲面透镜,例如能够使用公知的fθ透镜。扫描用透镜53,配置在反射部件42与扫描区域31之间。通过该扫描用透镜53,能够使焦距在扫描范围的中央部以及周边部保持恒定。
[0086]
电机44产生用以使反射部件42公转和自转的驱动力。电机44的驱动力,经由该电机44的输出轴被传递至行星齿轮组,以使支撑板41以及反射部件42旋转。再者,在本实施方式中,电机44是电动机,但不限于此。
[0087]
接着,参照图4以及图7,对用以使支撑板41以及反射部件42旋转的驱动机构进行说明。图7是以垂直于公转轴的平面切断反射单元20的剖视图。
[0088]
如图4所示,支撑板41的中心部,固定在第一旋转轴61的一轴向端部。在第一旋转轴61的另一轴向端部连接有电机44的输出轴。
[0089]
另外,在支撑板41的较中心部靠径向外侧的位置配置有第二旋转轴62。第二旋转轴62,能够旋转地被支撑在支撑板41。第二旋转轴62的一轴向端部,配置在壳体63的外部且被固定在基部71。第二旋转轴62的另一轴向端部配置在壳体63的内部。
[0090]
如图7所示,行星齿轮91在壳体63的内部被固定在第二旋转轴62。行星齿轮91隔着中间齿轮93与设在第一旋转轴61周围的太阳齿轮92咬合。太阳齿轮92固定在壳体63。中间齿轮93能够旋转地被支撑在支撑板41上。
[0091]
由此,当驱动电机44时,电机44的驱动力被传递至第一旋转轴61,以使支撑板41旋转。通过支撑板41的旋转,中间齿轮93的轴以及行星齿轮91的轴(第二旋转轴62)绕太阳齿轮92周围移动。此时,与太阳齿轮92咬合的中间齿轮93旋转,与中间齿轮93咬合的行星齿轮91也旋转。因此,隔着第二旋转轴62而被固定在行星齿轮91的反射部件42,同时进行公转和自转。
[0092]
太阳齿轮92固定在壳体63,在行星齿轮91与太阳齿轮92之间隔着中间齿轮93,因此,行星齿轮架即支撑板41的旋转方向与第二旋转轴62(反射部件42)的旋转方向为相同方向。另外,行星齿轮91的齿数,是太阳齿轮92的齿数的2倍。由此,反射部件42的公转角速度等于反射部件42的自转角速度的2倍。
[0093]
接着,参照图8,详细地说明反射部件42的公转角速度以及自转角速度的关系。
[0094]
在图8中,显示第二旋转轴62的随支撑板41的旋转的轨迹作为公转圆101。公转圆101的中心,位于朝相互垂直的方向延伸的x轴与y轴的交点(原点o)。原点o相当于反射部件42的公转轴。如上所述,能够认为在反射部件42上的光的偏转与通过所述平面88使光反射而产生的偏转实质上相同。因此,在图8中,通过显示等效的虚拟反射面即平面88的直线来表示反射部件42。
[0095]
反射部件42的自转轴,位于公转圆101上的任意点。在此,考虑反射部件42的自转轴位于点p的位置、且反射部件42的反射面的方向与x轴垂直的状态。此时,沿x轴的方向入射在原点o的光,在点p处通过反射部件42所反射。当如图8那样进行二维观察时,反射光的光路与入射光的光路一致。
[0096]
假设伴随支撑板41的旋转,反射部件42的自转轴的位置变化角度θ且自点p移动至点q。考虑反射部件42的自转角度在与公转角度的关系上成为何种的关系,才能使入射光照射在反射部件42上的点即使经过该公转也不会自点p变化的情况。
[0097]
为了使入射光在反射部件42的自转轴位于点q的情况下仍能在点p反射,反射部件42的朝向必须与自点q朝点p所引的直线的方向一致。
[0098]
假设连结点p与点q的直线的中点为m。另外,设想一通过点q且与y轴平行延伸的直线,且将该直线与x轴的交点设为n。
[0099]
由于点p以及q皆位于公转圆101的圆周上,因此,三角形opq是一等腰三角形。由此,由直线op与直线pm构成的角度opm等于由直线oq与直线qm构成的角度oqm。直线om与直线pq正交。另外,直线op与直线qn正交。
[0100]
若着眼在三角形oqm以及三角形nqp,如上所述,三角形的2个角度相等。因此,三角形oqm与三角形nqp相似。
[0101]
因此,由直线qo与直线om构成的角度qom与由直线pq与直线qn构成的角度pqn相等。直线qo与直线op构成的角度qop为θ。由此,角度qom为θ/2,角度pqn也为θ/2。
[0102]
由该结果可知,若以反射部件42的公转角速度为自转角速度的2倍的方式同时进行公转和自转,则反射部件42以始终在点p接触入射光的方式切断光路,因此能够使光路的长度恒定。
[0103]
如上所述,在本实施方式中,通过使具有反射面85、86的反射部件42旋转,而使入射光反射且偏转。由于反射部件42被以恒定角速度旋转驱动,且不进行像振镜反射镜那样的往返运动(加减速),因此能够避免能使被照射点202的移动速度保持恒定的扫描区域31变窄,且能够抑制因光的因素而造成的工件200的能加工范围的减小。并且,通过反射部件42的公转与自转的组合,能够防止反射部件42接触入射光的点的变动,因此与振镜反射镜同样,能够以理想的状态将光引导至扫描用透镜53。如此,能够获得兼具多面镜的特征即高照射率、以及振镜反射镜的特征即反射点变动难度的光反射装置。
[0104]
如以上说明,本实施方式的反射单元20具备反射部件42,该反射部件42具有平面状的反射面85、86。反射面85、86使入射光反射。反射部件42同时进行公转和自转。反射部件42的公转方向与自转方向相同。反射部件42的公转角速度等于自转角速度的2倍。
[0105]
由此,在反射部件42中相对于入射光的光的反射位置变得恒定,能够防止光的反射位置变动。因此,能够减少扫描的畸变失真。与振镜反射镜比较,能够通过反射部件42的旋转实现偏转而非通过往返移动,因此容易以恆速进行扫描。
[0106]
另外,在本实施方式的反射单元20中,反射面85、86,以成对的方式隔着反射部件42的自转轴而配置。
[0107]
反射部件42每公转360
°
则自转180
°
以改变其方向。因此,通过使方向彼此相差180
°
的反射面85、86形成一对而配置在反射部件42,当反射部件42切断入射光的光路时,其中一个反射面能有效地反射光。因此,能够将入射光高效率地引导至工件200。
[0108]
另外,本实施方式的反射单元20,具备3个反射部件42。3个反射部件42的公转轴一致。3个反射部件42,以按等角度间隔分割圆的方式配置,该圆以公转轴作为中心。
[0109]
由此,能够将入射光更高效率地引导至工件200。
[0110]
另外,本实施方式的反射单元20,具备行星齿轮组,该行星齿轮组进行反射部件42的公转和自转。
[0111]
由此,能够以简易的构成实现组合了反射部件42的公转和自转的複合动作。
[0112]
另外,在本实施方式的反射单元20中,如图3所示,反射部件42以沿与自转轴垂直的平面而偏转的方式反射光。该平面相对于入射在反射部件42的入射光而朝自转轴的方向偏移。
[0113]
由此,能够实现由反射部件42反射的反射光不会与光学部件等产生干扰的布局,该光学部件用以将入射光引导至反射单元20。
[0114]
另外,在本实施方式中,在反射部件42形成有第一反射面85以及第二反射面86。第一反射面85,形成为相对于与反射部件42的自转轴垂直的平面倾斜的平面状。第二反射面86,形成为相对于与反射部件42的自转轴垂直的平面倾斜的平面状。第一反射面85相对于与自转轴垂直的平面倾斜的方向与第二反射面86相对于与自转轴垂直的平面倾斜的方向相反。入射光由第一反射面85反射后,被第二反射面86反射。第一反射面85以及第二反射面
86,以相对于对称面87而相互对称的方式形成。对称面87的相对于第一反射面85的镜像、以及对称面87的相对于第二反射面86的镜像,相互处于同一平面88上。反射部件42的自转轴被包括在镜像的平面88内。
[0115]
由此,能够实现一简单的构成:以反射部件42一边反射入射光一边使入射光偏移,且在反射部件42中相对于入射光的光的反射位置恒定。
[0116]
另外,在本实施方式的导光装置13中,第一反射面85相对于与自转轴垂直的平面倾斜的角度θ为45
°
。第二反射面86相对于与自转轴垂直的平面88倾斜的角度θ为45
°
。
[0117]
由此,能够实现反射部件42的简易的构成。
[0118]
另外,本实施方式的导光装置13,具备所述构成的反射单元20。入射光通过反射单元20偏转而扫描工件200。
[0119]
由此,能够实现畸变失真少的扫描。
[0120]
另外,本实施方式的导光装置13,具备扫描用透镜53。扫描用透镜53,配置在自反射部件42至扫描区域31的光路上。
[0121]
由此,能够使焦距在整个扫描区域一致。另外,能够以理想的状态将光引导至扫描用透镜53。
[0122]
其次,说明支撑板41以及反射部件42的驱动机构的第一变形例。在本变形例的说明中,对与所述实施方式相同或类似的部件,在图中采用相同的符号,并省略其说明。
[0123]
在图9所示的变形例中,在支撑板41的外周近旁固定有环形齿轮94。环形齿轮94与固定在电机44的输出轴的驱动齿轮95咬合。其他的结构与图4基本相同。
[0124]
在本变形例中,也能够通过电机44的驱动而使支撑板41旋转,以进行反射部件42的公转和自转。
[0125]
接着,说明支撑板41以及反射部件42的驱动机构的第二变形例。在本变形例的说明中,对与所述实施方式相同或类似的部件,在图中采用相同的符号,并省略其说明。
[0126]
在图10所示的变形例中,也与图9相同,在支撑板41的外周近旁固定有环形齿轮94。
[0127]
在壳体63的内部能够旋转地支撑有2级齿轮96。2级齿轮96具有大径齿轮96a以及小径齿轮96b。大径齿轮96a与小径齿轮96b相互一体地旋转。大径齿轮96a,与固定在电机44的输出轴的驱动齿轮95咬合。小径齿轮96b与环形齿轮94咬合。
[0128]
在壳体63的内部能够旋转地支撑有传动齿轮97。传动齿轮97与2级齿轮96具备的大径齿轮96a咬合。
[0129]
与所述实施方式等不同,太阳齿轮92能够旋转地被支撑在壳体63上。传动齿轮97隔着传动轴98与太阳齿轮92连结。太阳齿轮92与传动轴98一体旋转。
[0130]
在本变形例中,省略了中间齿轮93。太阳齿轮92直接与行星齿轮91咬合,而不隔着中间齿轮93。
[0131]
利用该构成,当驱动电机44时,2级齿轮96旋转。其结果,环形齿轮94通过小径齿轮96b驱动,而使支撑板41旋转。同时,传动齿轮97通过大径齿轮96a驱动,而使太阳齿轮92旋转。
[0132]
太阳齿轮92,以大于支撑板41的角速度朝与支撑板41相同的方向旋转。其结果,能够使行星齿轮91以与公转相同的方向自转。另外,通过根据已知公式规定2级齿轮96等的齿
数,能够形成以反射部件42的公转角速度为自转角速度的2倍的方式同时进行公转和自转的构成。
[0133]
接着,参照图11以及图12,说明导光装置13的第二实施方式。在本实施方式的说明中,对与所述实施方式相同或类似的部件,在图中采用相同的符号,并省略说明。
[0134]
本实施方式与第一实施方式的不同点在于,导光装置13具备多个反射单元20。本实施方式,例如用以进行与第一实施方式比较而在主扫描方向上更长的工件200的加工。
[0135]
如图11以及图12所示,导光装置13具备多个反射单元20。在本实施方式的导光装置13配置有2个反射单元20。各反射单元20反射自激光产生器12入射的激光光线且引导至工件200。
[0136]
2个反射单元20,沿主扫描方向呈直线状排列配置。反射单元20的排列方向,也与扫描线201的长边方向一致。2个反射单元20,分别配置在与扫描线201的距离大致相等距离的位置。
[0137]
下面,关于多个反射单元20,也能够将在入射光的行进方向上位于上游侧(靠近激光产生器12侧)的反射单元20称为第一反射单元21。也能够将在入射光的行进方向上位于下游侧(远离激光产生器12侧)的反射单元20称为第二反射单元22。
[0138]
各反射单元20,能够通过反射激光光线并使的偏转而进行光扫描。通过第一反射单元21对工件200进行光扫描的区域(扫描区域)181,与第二反射单元22的扫描区域182不同。2个扫描区域181、182呈直线状排列配置。扫描线201由2个扫描区域181、182的集合构成。
[0139]
各反射单元20,能够在使入射光反射而进行扫描的反射状态、与不反射入射光而使其通过下游侧的通过状态之间反复进行切换。当反射单元20处于反射状态时,光扫描对应的扫描区域(例如,在第一反射单元21的情况下为扫描区域181)。当反射单元20处于通过状态时,该反射单元20不进行光扫描。
[0140]
各反射单元20成为反射状态的定时,在多个反射单元20之间不同。因此,通过切换成为反射状态的反射单元20,分别扫描多个扫描区域。
[0141]
在本实施方式中,相对于一个反射单元20设置2个反射部件42。2个反射部件42,分别在支撑板41上以等分360
°
的方式配置。具体而言,2个反射部件42,配置在使一个反射部件42在支撑板41的圆周方向上相对于另一反射部件42错开180
°
的位置。
[0142]
在支撑板41上,2个反射部件42配置在与正多边形(具体而言,正四边形)的相互对置的边对应的位置。由此,在2个反射部件42中,一个的反射部件42的中心角为90
°
。在与所述对置的边以外的边对应的位置未配置反射部件42。
[0143]
当2个反射部件42分别随支撑板41的旋转而移动时,交互地切换反射部件42接触激光光线的状态与不接触的状态,其中,该激光光线入射在反射单元20且沿第一光路l1行进。如图11的第一反射单元21所示,2个中的任一个反射部件42接触入射光的状态即为所述反射状态。如图12的第一反射单元21所示,2个中的任一个反射部件42皆不接触入射光的状态即为所述通过状态。
[0144]
第一光路l1与第一旋转轴61以及第二旋转轴62正交。另外,2个反射部件42,被配置为相互错开180
°
的相位。因此,隔着第一旋转轴61而配置的2个反射部件42中仅位于靠近第一光路l1的上游侧一侧的反射部件42接触入射光。
[0145]
如上述构成的2个反射单元20,通过相对于经由适宜的稜镜51而自激光产生器12进入的入射光设置,而构成本实施方式的导光装置13。在2个反射单元20中,反射部件42的公转轴与自转轴相互平行。并且,反射部件42,以相同的朝向进行公转与公转。反射部件42的公转角速度等于自转角速度的2倍。
[0146]
另外,反射部件42,分别以与另一反射单元20的反射部件42的公转相等的角速度、且相同的朝向,一边具有错开既定角度的旋转相位(本实施方式中为90
°
)一边公转。由此,能够在2个反射单元20之间使反射部件42接触入射光的定时不同。
[0147]
多个反射单元中的反射部件42的如上所述的公转和自转,例如,能够通过以同步旋转的方式控制2个反射单元20具备的省略图示的电机而实现。但是,例如,也能够通过共同的电机驱动2个反射单元20。
[0148]
图11显示2个反射单元20中的第一反射单元21处于反射状态而第二反射单元22处于通过状态的情况。图12显示各反射单元20的反射部件42自图11的状态进行公转和自转的结果,第一反射单元21变为通过状态而第二反射单元22变为反射状态的情况。如此,能够依序切换进行光扫描的反射单元20,整体能够实现沿较第一实施方式长的扫描线201的光扫描。
[0149]
如以上说明,在本实施方式的激光加工装置1中,通过反射单元20的反射部件42同时进行公转和自转,而在入射光照射在反射面85而反射的反射状态、与入射光不照射在反射面85而通过的通过状态之间进行切换。成为反射状态的定时,在多个导光装置13之间不同。一条直线状的扫描线201,由与多个导光装置13对应的扫描区域181、182的集合构成。
[0150]
由此,能够实现沿长扫描线的扫描。
[0151]
接着,参照图13,说明特殊形状的反射部件即旋转反射镜250。在本实施方式的说明中,对与所述实施方式相同或类似的部件,在图中采用相同的符号,并省略其说明。
[0152]
该旋转反射镜250,具备第一正多边形锥251以及第二正多边形锥252。在本实施方式中,2个正多边形锥251、252,形成为正八边形锥,但不限于此。
[0153]
2个正多边形锥251、252相互对置地配置,且使其轴260彼此对齐。2个正多边形锥251、252通过中间部255而相互结合。因此,2个正多边形锥251、252实质上被形成为多边形锥台状。
[0154]
在旋转反射镜250上安装有传动轴259。通过将省略图示的驱动装置(具体而言,电机)的驱动力传递至传动轴259,以使旋转反射镜250旋转。使光反射且偏转的反射装置,由旋转反射镜250以及驱动装置构成。此时的旋转轴,与2个正多边形锥251、252的轴260一致。
[0155]
2个正多边形锥251、252的侧面成为平面状的光反射面257。光反射面257绕轴260的周围排列配置。各光反射面257相对于轴260倾斜。
[0156]
第一正多边形锥251具有第一底面261。第二正多边形锥252具有第二底面262。第一底面261以及第二底面262,是正多边形且垂直于轴260而配置。
[0157]
在本实施方式中,第一正多边形锥251与第二正多边形锥252是相同的形状。由于2个正多边形锥251、252为正八边形锥,因此第一底面261以及第二底面262皆为正八边形。由此,第一底面261以及第二底面262的正多边形的边数相同。
[0158]
2个正多边形锥251、252,以使2个底面261、262具有的正八边形的相位相互一致的方式通过中间部255所结合。
[0159]
图13显示有切断旋转反射镜250的虚拟平面270。该虚拟平面270包括轴260,并且以通过底面261、262的正八边形的一边的中点271、272的方式被界定。
[0160]
假设将以虚拟平面270切断第一正多边形锥251时的底角设为α,且将以虚拟平面270切断第二正多边形锥252时的底角设为β,则在本实施方式的旋转反射镜250中,满足α β=90
°
的关系。在本实施方式中,α=β=45
°
,但不限于此。例如,也能够设定为α=30
°
,β=60
°
等。
[0161]
另外,在本实施方式中,当将第一底面261与第二底面262的距离设为d2,将第一底面261的正多边形的一边的中点271与轴260的距离设为d3,且将第二底面262的正多边形的一边的中点272与轴260的距离设为d4时,满足d2=d3
×
tanα d4
×
tanβ的关系。
[0162]
通过以上的构成,当考虑以虚拟平面270切断旋转反射镜250而获得的轮廓时,与第一正多边形锥251的光反射面257对应的直线281、以及与第二正多边形锥252的光反射面257对应的直线,成为相互垂直的关系。
[0163]
并且,由于在距离d2、d3、d4之间满足所述数式的关系,因此,若如图13的点划线所示将2条直线281、282延长,则2条直线281、282的交点位于轴260。这一点只要考虑2个直角三角形与tanα以及tanβ的关系则很明显。
[0164]
顺便提及,在所述实施方式中的图6的反射部件42中,其自转轴以被包括在虚拟的平面88即光的形式上的反射面内的方式配置。图13的旋转反射镜250的构成,是将所述设想扩大至正多边形锥状的反射镜而获得。
[0165]
在图13的旋转反射镜250中,考虑以与轴260交叉的方式自照射装置朝光反射面257照射光的情况。入射的光(例如,激光光线),由第一正多边形锥251的光反射面257反射后,被第二正多边形锥252的光反射面257反射而射出。
[0166]
配置在旋转反射镜250的侧面的各光反射面257,分别能够与底面261、262的正多边形的各边建立对应。下面的说明中,也能够将与被光照射的光反射面257对应的所述正多边形的边称为对应边。
[0167]
在此,假想一厚度为零的平面290的情况,该平面290以包括轴260的方式配置且与旋转反射镜250一起旋转。该平面290与所述的对应边平行配置。利用具有一对正多边形锥状的部分的旋转反射镜250反射2次而使入射光偏转的情况,与通过该平面290进行一次反射而使入射光偏转的情况等效。
[0168]
由此,在旋转反射镜250上相对于入射光的光的反射位置变得恒定。其结果,能够防止光的反射位置变动。
[0169]
在本实施方式中,构成为单纯使旋转反射镜250通过传动轴259而旋转的构成,而作为旋转中心的轴260不移动。在本实施方式中,由于不需要使公转与自转组合的大型旋转装置,因此能够容易实现构成的简易化以及小型化。
[0170]
该旋转反射镜250,例如,能够与所述电机44、壳体17、扫描用透镜53、激光产生器12等一起使用,以构成图1所示的导光装置13以及激光加工装置1。如上所述,在该激光加工装置中,旋转反射镜250上的光的反射位置实质上恒定。因此,通过使用fθ透镜作为扫描用透镜53,能够使焦点以恒定的速度在被照射点202上扫描。与振镜反射镜比较,由于通过旋转反射镜250的旋转实现偏转而非通过往返运动,因此容易以恒定的速度进行扫描。
[0171]
如以上说明,本实施方式的激光加工装置,具备旋转反射镜250、电机以及照射装
置。电机使旋转反射镜250旋转。照射装置朝旋转反射镜250照射光。旋转反射镜250,具备第一正多边形锥251以及第二正多边形锥252。第二正多边形锥252,使轴260与第一正多边形锥251的轴对齐,而与该第一正多边形锥251对置配置。第一正多边形锥251以及第二正多边形锥252的各个侧面,成为平面状的光反射面257。在第一正多边形锥251的第一底面261以及第二正多边形锥252的第二底面262,正多边形的边的边数相等。第一底面261以及第二底面262,皆与轴260垂直配置。第一正多边形锥251以及第二正多边形锥252,一边使第一底面261的正多边形的相位与第二底面262的正多边形的相位相互一致,一边以轴260作为旋转轴通过电机相互一体旋转。以包括轴260并且通过第一底面261的正多边形的一边的中点271的虚拟平面270切断第一正多边形锥251时的底角为α
°
。以包括轴260并且通过第二底面262的正多边形的一边的中点272的虚拟平面270切断第二正多边形锥252时的底角为β=(90
‑
α)
°
。第一底面261与第二底面262的距离d2,等于将第一底面261的正多边形的一边的中点271与轴260的距离d3乘以tanα的值与将第二底面262的多边形的一边的中点与轴260的距离d4乘以tan(90
‑
α)的值的和。照射装置朝与旋转反射镜250的轴260交叉的方向照射光。
[0172]
由此,旋转反射镜250上的相对于入射光的光的反射位置变得恒定,能够防止光反射位置随旋转而变动。因此,能够减少扫描的畸变失真。
[0173]
另外,在本实施方式的导光装置中,底角α为45
°
。
[0174]
由此,能够将旋转反射镜250作成单纯的形状。另外,能够实现简洁的光路布局。
[0175]
上面,对本发明的较佳实施方式以及变形例进行了说明,但所述构成例如能够变更如下。
[0176]
反射单元20上的相对于支撑板41的反射部件42的数量,不限于如第一实施方式中的3个,例如能够为4个或5个。
[0177]
反射单元20的数量,能够根据照射对象的形状等而设定,例如,能够设为3个、4个或5个,以取代第二实施方式的2个。
[0178]
也能够通过稜镜实现反射部件42的第一反射部81以及第二反射部82。
[0179]
应用导光装置13的光扫描装置,不限于激光加工装置1,例如,也能够为图象形成装置。
[0180]
在第三实施方式中,作为第一正多边形锥251以及第二正多边形锥252,例如,能够使用正六边形锥、正九边形锥等,以取代正八边形锥。第一底面261以及第二底面262的尺寸能够设为互不相同的构成。
[0181]
在第三实施方式的旋转反射镜250中,对在不反射光的部分,能够采用自由的形状。图13所示的第一正多边形锥251以及第二正多边形锥252,实际上为正多边形锥台,但只要反射光的部分为正多边形锥状,也包括在正多边形锥内。“底面”以及“底角”的名称,并非限制正多边形锥的方向者。旋转反射镜250,能够在任何方向上使用其轴260。
[0182]
显然,只要根据所述教示,本发明能够取得大量的变更形态以及变形形态。因此,应理解为在添附的权利要求范围内,能够以本说明书记载的方法以外的方法实施本发明。
[0183]
附图标记说明
[0184]
1 激光加工装置(光扫描装置)
[0185]
13 导光装置
[0186]
20 反射单元(光反射装置)
[0187]
31 扫描区域
[0188]
42 反射部件
[0189]
53 扫描用透镜
[0190]
61 第一旋转轴(支撑板的旋转轴)
[0191]
62 第二旋转轴(反射部件的旋转轴)
[0192]
81 第一反射部(反射部)
[0193]
82 第二反射部(反射部)
[0194]
85 第一反射面
[0195]
86 第二反射面
[0196]
200 工件(被照射物)
[0197]
201 扫描线
[0198]
202 被照射点
[0199]
250 旋转反射镜(反射部件)
[0200]
251 第一正多边形锥
[0201]
252 第二正多边形锥
[0202]
257 光反射面
[0203]
260 轴(旋转轴)
[0204]
261 第一底面
[0205]
262 第二底面
[0206]
α、β 底角。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。