1.[与关联申请的相互参照]
[0002]
本技术主张在2019年2月25日申请的美国临时专利申请第62/810,363号、在2019年4月26日申请的国际申请第pct/jp2019/018116号、以及在2019年4月26日申请的国际申请第pct/jp2019/018127号的优先权。此外,上述的国际申请第pct/jp2019/018116号和国际申请第pct/jp2019/018127号主张上述的美国临时专利申请第62/810,363号的优先权。对于允许以参照方式编入文献的指定国家,通过参照将这些文献整体编入到本说明书中。
[0003]
本技术与下述的国际申请相关联。本技术在美国为下述的国际申请的部分延续申请。
[0004]
1.国际申请第pct/jp2019/018116号申请日2019年4月26日
[0005]
2.国际申请第pct/jp2019/018127号申请日2019年4月26日
[0006]
本发明涉及一种保管系统、支架、控制装置、程序以及搬运机器人。
背景技术:
[0007]
已知一种具备容纳大量的集装箱的货架以及取出/放入该集装箱的机器人的自动化立体仓库(例如,请参照专利文献1~2和非专利文献1)。
[0008]
现有技术文献
[0009]
专利文献
[0010]
专利文献1:日本特开2012
‑
116651号公报
[0011]
专利文献2:日本特开2017
‑
132641号公报
[0012]
非专利文献
[0013]
非专利文献1:株式会社冈村制作所,“自动仓库型拣选系统”autostore“日本发售开始”、[online]、[2018年10月5日搜索]、因特网<http://www.okamura.co.jp/company/topics/butsuryu/2014/autostore_1.php>
技术实现要素:
[0014]
发明要解决的问题
[0015]
在以往的自动仓库中,为了增加保管密度,使用了大型且质量大的货架。因此,期望的是能够在抑制保管密度的下降的同时使货架小型化或轻量化。
[0016]
用于解决问题的方案
[0017]
在本发明的第一方式中,提供一种保管系统。上述的保管系统例如具备支承用于容纳物品的集装箱的支架。上述的保管系统例如具备搬运集装箱的搬运机器人。
[0018]
在上述的保管系统中,搬运机器人例如具有能够搭载集装箱的搭载部。搬运机器人例如具有使搭载部沿上下方向移动的升降部。搬运机器人例如具有切换部,该切换部用于支架限制集装箱在上下方向上的移动的状态与支架不限制集装箱在上下方向上的移动的状态之间的切换。在上述的保管系统中,例如,在支架不限制集装箱在上下方向上的移动
的状态下,升降部使作为保管对象的集装箱从比支架上的集装箱的支承位置靠下方的位置移动至支承位置。在上述的保管系统中,例如,在作为保管对象的集装箱到达支承位置之后,切换部将支架不限制集装箱在上下方向上的移动的状态切换为支架限制集装箱在上下方向上的移动的状态。
[0019]
上述的保管系统也可以具备对搬运机器人的运转进行管理的运转管理部。
[0020]
在本发明的第二方式中,提供一种保管系统。上述的保管系统例如将物品容纳于集装箱来进行保管。上述的保管系统例如具备1个以上的支架。
[0021]
在上述的保管系统中,集装箱例如具备侧面构件,该侧面构件的至少一部分具有中空柱状。在上述的保管系统中,集装箱例如具备底面构件,该底面构件将在侧面构件的一方的端部形成的开口堵塞。在上述的保管系统中,集装箱例如具备沿侧面构件的轴向延伸的第一区域。在上述的保管系统中,集装箱例如具备与第一区域相邻且沿侧面构件的轴向延伸的第二区域。外切于在第一区域以与侧面构件的轴向大致垂直的平面剖切集装箱的外周而得到的第一截面形状的第一外切圆的直径例如大于外切于在第二区域以与侧面构件的轴向大致垂直的平面剖切集装箱的外周而得到的第二截面形状的第二外切圆的直径。第一外切圆的中心和第二外切圆的中心例如配置于侧面构件的延伸轴上的不同的位置。
[0022]
在上述的保管系统中,1个以上的支架中的各支架例如具有多个支承部,该多个支承部从下方支承1个以上的集装箱所包括的第一集装箱的第一区域,由此将1个以上的集装箱支承在用于设置该支架的设置面的上方的位置。在上述的保管系统中,1个以上的支架中的各支架例如具有多个基础部,该多个基础部配置于多个支承部与设置面之间,将多个支承部所承受的1个以上的集装箱的荷载传递到设置面。在上述的保管系统中,在多个基础部的内侧例如形成有1个以上的集装箱能够沿上下方向移动的升降空间。在上述的保管系统中,多个支承部中的各支承部例如配置于以下位置,该位置是(i)在1个以上的集装箱的侧面构件的基准面与支架的基准面所形成的角度满足预先决定的条件的情况下限制升降空间中的1个以上的集装箱在上下方向上的移动、并且在上述的角度不满足预先决定的条件的情况下不限制升降空间中的1个以上的集装箱在上下方向上的移动的位置、并且是(ii)使被支架支承的1个以上的集装箱的位于最下部的集装箱不限制至少1个集装箱在支架的外部与升降空间之间的移动的位置。
[0023]
上述的保管系统可以具备1个以上的搬运机器人。1个以上的搬运机器人中的各搬运机器人可以具有能够搭载至少1个集装箱的搭载部。1个以上的搬运机器人中的各搬运机器人可以搬运搭载于搭载部的至少1个集装箱。在上述的保管系统中,多个支承部中的各支承部可以配置于以下位置,该位置是即使在支架支承着1个以上的集装箱的情况下、也能够使搭载了至少1个集装箱的1个以上的搬运机器人中的至少1个搬运机器人在1个以上的集装箱的位于最下部的集装箱的下方行进的位置。
[0024]
在上述的保管系统中,1个以上的搬运机器人中的各搬运机器人可以将至少1个集装箱搬运到1个以上的支架中的作为目标的支架的升降空间的内部。1个以上的搬运机器人中的各搬运机器人可以以使至少1个集装箱的基准面与作为目标的支架的基准面所形成的角度不满足预先决定的条件的方式调整至少1个集装箱的位置。1个以上的搬运机器人中的各搬运机器人可以使搭载部向上方移动,直到至少1个集装箱所包括的第二集装箱的第一区域的下端位于比作为目标的支架的多个支承部的上端靠上方的位置为止。1个以上的搬
运机器人中的各搬运机器人可以以使至少1个集装箱的基准面与作为目标的支架的基准面所形成的角度满足预先决定的条件的方式调整至少1个集装箱的位置。由此,上述的保管系统可以使由作为目标的支架支承的集装箱的个数增加。
[0025]
在上述的保管系统中,1个以上的搬运机器人中的各搬运机器人可以将至少1个集装箱搬运到1个以上的支架中的作为目标的支架的升降空间的内部。1个以上的搬运机器人中的各搬运机器人可以以使(i)被作为目标的支架支承着的1个以上的集装箱的位于最下部的集装箱的侧面构件的延伸轴与至少1个集装箱的侧面构件的延伸轴一致、且(ii)至少1个集装箱的基准面与作为目标的支架的基准面所形成的角度满足预先决定的条件的方式,调整至少1个集装箱的位置。1个以上的搬运机器人中的各搬运机器人可以使搭载部向上方移动,直到至少1个集装箱的位于最上部的集装箱的上端到达支承被作为目标的支架支承着的1个以上的集装箱的位于最下部的集装箱的下端的位置为止。1个以上的搬运机器人中的各搬运机器人可以以使至少1个集装箱的基准面与作为目标的支架的基准面所形成的角度不满足预先决定的条件的方式调整至少1个集装箱的位置。1个以上的搬运机器人中的各搬运机器人可以使搭载部向上方移动,直到至少1个集装箱所包括的第二集装箱的第一区域的下端位于比作为目标的支架的多个支承部的上端靠上方的位置为止。1个以上的搬运机器人中的各搬运机器人可以以使至少1个集装箱的基准面与作为目标的支架的基准面所形成的角度满足预先决定的条件的方式调整至少1个集装箱的位置。由此,上述的保管系统可以使被作为目标的支架支承的集装箱的个数增加。
[0026]
在上述的保管系统中,1个以上的搬运机器人中的各搬运机器人可以移动到1个以上的支架中的作为目标的支架的升降空间的内部。1个以上的搬运机器人中的各搬运机器人可以将搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱的位置调整为被作为目标的支架支承着的第一集装箱的下方的特定的位置。1个以上的搬运机器人中的各搬运机器人可以使搭载部上升,直到搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱支承被作为目标的支架支承着的1个以上的集装箱的位于最下部的集装箱为止。1个以上的搬运机器人中的各搬运机器人可以以使第一集装箱的基准面与作为目标的支架的基准面所形成的角度不满足预先决定的条件的方式调整1个以上的集装箱的位置。1个以上的搬运机器人中的各搬运机器人可以使搭载部向下方移动,直到被作为目标的支架支承着的1个以上的集装箱中的、位于比第一集装箱靠上方的位置的第三集装箱的第一区域的下端与作为目标的支架的多个支承部的上端之间的在上下方向上的距离变为0或预先决定的正的数值范围内为止。1个以上的搬运机器人中的各搬运机器人可以以使第三集装箱的基准面与作为目标的支架的基准面所形成的角度满足预先决定的条件的方式调整1个以上的集装箱的位置。由此,上述的保管系统可以使由作为目标的支架支承的集装箱的个数减少。
[0027]
在上述的保管系统中,预先决定的正的数值范围可以被设定成:在第三集装箱的第一区域的下端与作为目标的支架的多个支承部的上端之间的在上下方向上的距离变为该预先决定的正的数值范围内的情况下,被作为目标的支架支承着的1个以上的集装箱中的第三集装箱的紧下方的一个集装箱的第一区域的上端位于比作为目标的支架的多个支承部的下端靠下方的位置。
[0028]
在上述的保管系统中,1个以上的搬运机器人中的各搬运机器人可以移动到1个以
上的支架中的作为目标的支架的升降空间的内部。1个以上的搬运机器人中的各搬运机器人可以将搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱的位置调整为被作为目标的支架支承着的第一集装箱的下方的特定的位置。1个以上的搬运机器人中的各搬运机器人可以使搭载部上升,直到搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱支承被作为目标的支架支承着的1个以上的集装箱的位于最下部的集装箱为止。1个以上的搬运机器人中的各搬运机器人可以以使第一集装箱的基准面与作为目标的支架的基准面所形成的角度不满足预先决定的条件的方式调整1个以上的集装箱的位置。1个以上的搬运机器人中的各搬运机器人可以使搭载部向下方移动,直到被作为目标的支架支承着的第一集装箱的第一区域的上端位于比作为目标的支架的多个支承部的下端靠下方的位置为止。由此,上述的保管系统可以使由作为目标的支架支承的集装箱的个数减少。
[0029]
在上述的保管系统中,1个以上的支架中的各支架可以从下方支承1个以上的集装箱所包括的多个第一集装箱,由此将1个以上的集装箱支承在用于设置该支架的设置面的上方的位置。上述的保管系统可以具备对搬运机器人的运转进行管理的运转管理部。
[0030]
在本发明的第三方式中,提供一种支架。上述的支架例如支承用于容纳物品的集装箱。
[0031]
在上述的支架中,集装箱例如具备侧面构件,该侧面构件的至少一部分具有中空柱状的形状。在上述的支架中,集装箱例如具备底面构件,该底面构件将在侧面构件的一方的端部形成的开口堵塞。在上述的支架中,集装箱例如具备沿侧面构件的轴向延伸的第一区域。在上述的支架中,集装箱例如具备与第一区域相邻且沿侧面构件的轴向延伸的第二区域。外切于在第一区域以与侧面构件的轴向大致垂直的平面剖切集装箱的外周而得到的第一截面形状的第一外切圆的直径例如大于外切于在第二区域以与侧面构件的轴向大致垂直的平面剖切集装箱的外周而得到的第二截面形状的第二外切圆的直径。第一外切圆的中心和第二外切圆的中心例如配置于侧面构件的延伸轴上的不同的位置。
[0032]
上述的支架例如具有多个支承部,该多个支承部从下方支承1个以上的集装箱所包括的第一集装箱的第一区域,由此将1个以上的集装箱支承在用于设置该支架的设置面的上方的位置。上述的支架例如具有多个基础部,该多个基础部配置于多个支承部与设置面之间,将多个支承部所承受的1个以上的集装箱的荷载传递到设置面。在上述的支架中,在多个基础部的内侧例如形成有1个以上的集装箱能够沿上下方向移动的升降空间。在上述的支架中,多个支承部中的各支承部例如配置于以下位置,该位置是(i)在1个以上的集装箱的侧面构件的基准面与支架的基准面所形成的角度满足预先决定的条件的情况下限制升降空间中的1个以上的集装箱在上下方向上的移动、并且在角度不满足预先决定的条件的情况下不限制升降空间中的1个以上的集装箱在上下方向上的移动的位置,并且是(ii)使被支架支承的1个以上的集装箱的位于最下部的集装箱不限制至少1个集装箱在支架的外部与升降空间之间的移动的位置。
[0033]
在上述的支架中,多个基础部可以具有4根支柱构件。多个支承部可以具有4根梁构件。4根支柱构件中的各支柱构件可以被配置成一方的端部与设置面接触。(i)在设置面的外切于4根支柱构件的四边形的对角线的长度可以大于第一外切圆的直径或用于搬运集装箱的搬运机器人的最小旋转直径。(ii)在设置面的该四边形的各边的长度可以小于第一外切圆的直径或最小旋转直径。(iii)在设置面的该四边形的各边的长度的最大值可以大
于搭载了集装箱的搬运机器人通行所需的宽度。4根梁构件中的各梁构件可以被支承于2根支柱构件。4根梁构件中的各梁构件可以被配置成:在该梁构件的下端与设置面的距离大于搭载了集装箱的搬运机器人通行所需的高度的位置处,该梁构件的延伸方向与所述2根支柱构件的延伸方向大致垂直。在上述的支架中,最小旋转直径可以是在搬运机器人将方向盘操作到最大来转弯的情况下或者在搬运机器人以与设置面大致垂直的轴为中心来原地旋转的情况下搬运机器人的位于最外侧的部位所描绘出的圆的直径。
[0034]
上述的支架可以具备翻倒防止构件,该翻倒防止构件用于防止被支架支承的1个以上的集装箱翻倒。
[0035]
在本发明的第四方式中,提供一种控制装置。上述的控制装置例如控制搬运机器人。在上述的控制装置中,上述的搬运机器人例如是为了搬运用于容纳物品的集装箱并将集装箱保管于支架而使用的。
[0036]
在上述的控制装置中,集装箱例如具备侧面构件,该侧面构件的至少一部分具有中空柱状的形状。在上述的控制装置中,集装箱例如具备底面构件,该底面构件将在侧面构件的一方的端部形成的开口堵塞。在上述的控制装置中,集装箱例如具备沿侧面构件的轴向延伸的第一区域。在上述的控制装置中,集装箱例如具备与第一区域相邻且沿侧面构件的轴向延伸的第二区域。外切于在第一区域以与侧面构件的轴向大致垂直的平面剖切集装箱的外周而得到的第一截面形状的第一外切圆的直径例如大于外切于在第二区域以与侧面构件的轴向大致垂直的平面剖切集装箱的外周而得到的第二截面形状的第二外切圆的直径。第一外切圆的中心和第二外切圆的中心例如配置于侧面构件的延伸轴上的不同的位置。
[0037]
在上述的控制装置中,支架例如具备多个支承部,该多个支承部从下方支承集装箱的第一区域,由此将集装箱支承在用于设置该支架的设置面的上方的位置。在上述的控制装置中,支架例如具备多个基础部,该多个基础部配置于多个支承部与设置面之间,将多个支承部所承受的集装箱的荷载传递到设置面。在上述的控制装置中,在多个基础部的内侧例如形成有集装箱能够沿上下方向移动的升降空间。在上述的控制装置中,多个支承部中的各支承部例如配置于以下位置,该位置是(i)在集装箱的侧面构件的基准面与支架的基准面所形成的角度满足预先决定的条件的情况下限制升降空间中的集装箱在上下方向上的移动、并且在角度不满足预先决定的条件的情况下不限制升降空间中的集装箱在上下方向上的移动的位置,并且是(ii)使被支架支承的集装箱不限制其它集装箱在支架的外部与升降空间之间的移动的位置。
[0038]
在上述的控制装置中,搬运机器人例如具备能够搭载集装箱的搭载部。在上述的控制装置中,搬运机器人例如具备使搭载部沿上下方向移动的升降部。在上述的控制装置中,搬运机器人例如具备使搬运机器人移动的移动部。
[0039]
上述的控制装置例如执行以下过程:移动部使搬运机器人移动,来将集装箱搬运到支架的升降空间的内部。上述的控制装置例如执行以下过程:移动部使搬运机器人移动,以使集装箱的基准面与支架的基准面所形成的角度不满足预先决定的条件的方式调整集装箱的位置。上述的控制装置例如执行以下过程:升降部使搭载部向上方移动,来将集装箱的第一区域的下端配置为比支架的多个支承部的上端靠上方。上述的控制装置例如执行以下过程:移动部使搬运机器人移动,以使集装箱的基准面与支架的基准面所形成的角度满
足预先决定的条件的方式调整集装箱的位置。
[0040]
上述的控制装置可以执行以下过程:移动部使搬运机器人移动到支架的升降空间的内部。上述的控制装置可以执行以下过程:移动部使搬运机器人移动,来将搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱的位置调整为被支架支承着的集装箱的下方的特定的位置。上述的控制装置可以执行以下过程:升降部使搭载部向上方移动,从而搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱支承被支架支承着的集装箱。上述的控制装置可以执行以下过程:移动部使搬运机器人移动,以使集装箱的基准面与支架的基准面所形成的角度不满足预先决定的条件的方式调整集装箱的位置。上述的控制装置可以执行以下过程:升降部使搭载部向下方移动,从而被支架支承着的集装箱的第一区域的上端配置为比支架的多个支承部的下端靠下方。
[0041]
在本发明的第五方式中,提供一种程序。上述的程序可以是用于使计算机作为控制装置发挥功能的程序。上述的程序也可以是用于使计算机执行控制装置中的信息处理过程的程序。上述的控制装置可以是上述的第四方式所涉及的控制装置。另外,也可以提供保存上述的程序的计算机可读介质。计算机可读介质也可以是非暂时性计算机可读介质。计算机可读介质也可以是计算机可读记录介质。
[0042]
在本发明的第六方式中,提供一种搬运机器人。上述的搬运机器人例如具备控制装置。上述的控制装置可以是上述的第四方式所涉及的控制装置。上述的搬运机器人例如具备搭载部。上述的搬运机器人例如具备升降部。上述的搬运机器人例如具备移动部。
[0043]
此外,上述的发明的概要并未列举本发明所需的全部特征。另外,这些特征组的子组合也能够成为发明。
附图说明
[0044]
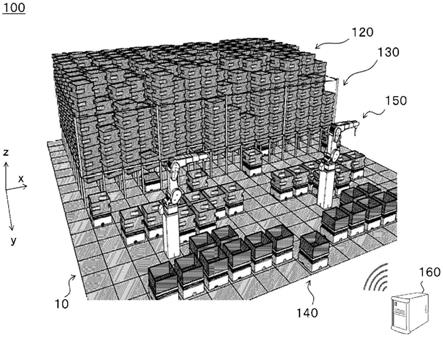
图1概要性地表示自动仓库100的内部的一例。
[0045]
图2概要性地表示自动仓库100的系统结构的一例。
[0046]
图3概要性地表示自动仓库100中的集装箱的保管方法的一例。
[0047]
图4概要性地表示集装箱120的一例。
[0048]
图5概要性地表示集装箱120的a
‑
a'截面处的截面形状的一例。
[0049]
图6概要性地表示集装箱120的b
‑
b'截面处的截面形状的一例。
[0050]
图7概要性地表示集装箱120的c
‑
c'截面处的截面形状的一例。
[0051]
图8概要性地表示集装箱120与钢丝232的位置关系的一例。
[0052]
图9概要性地表示搬运车140的一例。
[0053]
图10概要性地表示控制部960的内部结构的一例。
[0054]
图11概要性地表示搬运车140与货架130的位置关系的一例。
[0055]
图12概要性地表示集装箱120的保存过程的一例。
[0056]
图13概要性地表示集装箱120的保存过程的一例。
[0057]
图14概要性地表示集装箱120的保存过程的一例。
[0058]
图15概要性地表示集装箱120的保存过程的一例。
[0059]
图16概要性地表示集装箱120的保存过程的一例。
[0060]
图17概要性地表示集装箱120的保存过程的另一例。
[0061]
图18概要性地表示集装箱120的保存过程的另一例。
[0062]
图19概要性地表示集装箱120的保存过程的另一例。
[0063]
图20概要性地表示集装箱120的保存过程的另一例。
[0064]
图21概要性地表示集装箱120的保存过程的另一例。
[0065]
图22概要性地表示集装箱120的保存过程的另一例。
[0066]
图23概要性地表示集装箱120的保存过程的另一例。
[0067]
图24概要性地表示集装箱120的取出过程的一例。
[0068]
图25概要性地表示管理服务器160的内部结构的一例。
[0069]
图26概要性地表示自动仓库2600的系统结构的另一例。
具体实施方式
[0070]
下面,通过发明的实施方式来说明本发明,但是下面的实施方式并不用于限定权利要求书所涉及的发明。另外,在实施方式中说明的特征的组合不一定全部是发明的解决方案所必需的。此外,有时在附图中对相同或类似的部分标注相同的参照标记并省略重复的说明。
[0071]
在本技术说明书中,“1个以上”这一用语表示“一个或多个”。“上方”不仅包括该方向为铅直方向向上的情况,还包括该方向与铅直方向所形成的角度小于90度的情况。该方向与铅直方向所形成的角度可以是60度以下,也可以是45度以下,还可以是30度以下。“下方”不仅包括该方向为铅直方向向下的情况,还包括该方向与铅直方向所形成的角度小于90度的情况。该方向与铅直方向所形成的角度可以是60度以下,也可以是45度以下,还可以是30度以下。
[0072]
[自动仓库100的概要]
[0073]
使用图1、图2以及图3来说明自动仓库100的系统结构的概要。图1概要性地表示自动仓库100的内部的一例。图2概要性地表示自动仓库100的系统结构的一例。图3概要性地表示自动仓库100中的集装箱的保管方法的一例。
[0074]
如图1所示,在本实施方式中,自动仓库100具备1个以上的集装箱120和1个以上的货架130。自动仓库也可以具备1个以上的搬运车140。自动仓库100也可以具备1个以上的拣选装置150。自动仓库100也可以具备管理服务器160。如图1和图2所示,在本实施方式中,自动仓库100的地板10配置在x
‑
y平面上。另外,自动仓库100的壁20从地板10起沿z方向延伸。在本实施方式中,有时将与z方向大致平行的方向称作上下方向。
[0075]
在本实施方式中,自动仓库100保管1个以上的物品。1个以上的物品中的各物品例如以容纳在集装箱120中的状态被保管。作为物品的保管,例示出搬入、保存、管理、搬出等。
[0076]
更具体地说,在向自动仓库100搬入物品的情况下,首先通过拣选装置150将作为搬入对象的物品容纳到集装箱120。接着,搬运车140将集装箱120搬运至由管理服务器160指定的货架130。之后,集装箱120从搬运车140被移载到货架130。由此,物品被搬入自动仓库100。
[0077]
另外,在从自动仓库100搬出物品的情况下,首先,管理服务器160确定容纳作为搬出对象的物品的集装箱120的保管场所。管理服务器160使搬运车140移动至保管了集装箱120的货架130。接着,上述的集装箱120从货架130被移载到搬运车140。搬运车140将集装箱
120搬运至拣选装置150的拣选位置。之后,作为搬出对象的物品被拣选装置150从集装箱120取出。由此,物品从自动仓库100被搬出。
[0078]
根据本实施方式,多个货架130呈矩阵状地设置在自动仓库100的地板10上。多个货架130中的各货架130构成为能够支承1个以上的集装箱120。多个货架130中的各货架130例如构成为能够支承堆叠成一列的多个集装箱120。
[0079]
[货架130的概要]
[0080]
多个货架130中的各货架130例如构成为:各货架在设置于规定的位置的情况下,能够从侧方或下方支承沿上下方向堆叠的多个集装箱120的一部分。例如,如图3所示,在集装箱120的外侧的侧面形成有多个切口部124。根据本实施方式,多个切口部124中的各切口部124的一部分被配置成嵌入到货架130的一部分,由此货架130从下方支承集装箱120。由此,在货架130的预先决定的支承位置,集装箱120的向下方向的移动被抑制,集装箱120能够被保管在货架130中。
[0081]
在一个实施方式中,货架130构成为能够从侧方或下方支承沿上下方向堆叠的多个集装箱120中包括的单个集装箱120。在另一实施方式中,货架130构成为能够从侧方或下方支承沿上下方向堆叠的多个集装箱120中包括的至少2个集装箱120。
[0082]
货架130可以通过使力作用于上述的一部分集装箱120的侧面来支承上述的多个集装箱120。货架130可以通过使力作用于在上述的一部分集装箱120的侧面配置的孔的内面或凹凸来支承上述的多个集装箱120。货架130可以通过使力作用于上述的一部分集装箱120的底面来支承上述的多个集装箱120。货架130可以通过使力作用于上述的一部分集装箱120的侧面和底面来支承上述的多个集装箱120。
[0083]
更具体地说,如图2所示,货架130例如具备框架222和框架支撑件224。货架130可以具备多个框架222。货架130可以具备多个框架支撑件224。另外,货架130可以具备1个以上的钢丝232和1个以上的钢丝支撑件234。此外,货架130也可以具有用于加强框架222和框架支撑件224中的至少一方的强度的加强构件(未图示。)。
[0084]
另外,如图3所示,框架222和框架支撑件224例如构成为:在货架130被配置在地板10之上时,在货架130的内部形成空间322和空间324。在本实施方式中,在货架130的内部形成1个空间322和4个空间324。空间322和空间324可以构成集装箱120的搬运路径的一部分。
[0085]
在本实施方式中,空间322可以是在虚拟地使框架222沿着大致垂直于地板10的方向从框架222的设置位置移动至地板10的位置的情况下由框架222形成的开口或者形成于框架222的开口所通过的区域。大致垂直于地板10的方向既可以是铅直方向,也可以是相对于铅直方向以被货架130支承的多个集装箱120不会因重力而翻倒或倒塌的程度倾斜的方向。空间322的上端部可以被框架222包围。空间322的侧面可以被空间324包围。
[0086]
在本实施方式中,可以基于集装箱120的形状和大小来决定空间322的形状和大小。以使集装箱120能够在空间322的内部以大致垂直于地板10的旋转轴为中心进行旋转的方式,决定空间322的形状和大小。也可以是,以使集装箱120在空间322的内部能够旋转的角度满足预先决定的数值范围的方式决定空间322的形状和大小。集装箱120的旋转可以通过搬运车140的旋转或转弯来实现。在搬运车140具有使搭载集装箱120的搭载面沿大致水平方向旋转的旋转机构的情况下,集装箱120的旋转也可以通过该旋转机构的动作来实现,还可以通过该旋转机构的动作和搬运车140的旋转或转弯的组合来实现。
[0087]
在一个实施方式中,以如下方式决定空间322的形状和大小:使搭载了预先决定的个数的集装箱120的搬运车140在进入空间322的内部之后,能够在空间322的内部以大致垂直于地板10的旋转轴为中心进行旋转或转弯。在另一实施方式中,例如以如下方式决定空间322的形状和大小:在搭载了预先决定的个数的集装箱120的搬运车140进入空间322的内部之后,配置于搬运车140的旋转机构能够使搭载于搬运车140的集装箱120以大致垂直于地板10的旋转轴为中心进行旋转。
[0088]
在本实施方式中,可以以如下方式决定空间322的形状和大小:使搭载了预先决定的个数的集装箱120的搬运车140能够以不撞击被货架130支承着的1个以上的集装箱120的方式通过空间322。也可以以如下方式决定空间322的形状和大小:使配置于空间322的内部的集装箱120能够沿上下方向移动。例如,以如下方式决定空间322的形状和大小:在上述的集装箱120的位置和姿势中的至少一方满足特定的条件的情况下,上述的集装箱120能够从空间322的内部上升到空间322的外部或从空间322的外部下降到空间322的内部。
[0089]
在本实施方式中,4个空间324中的各空间324可以是被地板10、框架222以及框架支撑件224包围的区域。4个空间324中的各空间324使货架130的外部与空间322连通。
[0090]
在本实施方式中,以如下方式决定空间324的形状和大小:使搭载了预先决定的个数的集装箱120的搬运车140能够通过空间324。例如,以如下方式决定空间324的大小:使搭载了预先决定的个数的集装箱120的搬运车140能够将集装箱120从货架130的外部通过空间324搬入到空间322的内部。也可以以如下方式决定空间324的大小:使搭载了预先决定的个数的集装箱120的搬运车140能够将集装箱120从空间322的内部通过空间324搬出到货架130的外部。
[0091]
由此,搬运车140能够在配置成矩阵状的多个货架130之下自如地行进,来将集装箱120在第一位置与第二位置之间搬运。例如,搬运车242将至少1个集装箱120在货架130与拣选装置150之间搬运。搬运车242也可以将至少1个集装箱120在第一货架130与第二货架130之间搬运。
[0092]
[集装箱120的保管方法的概要]
[0093]
在本实施方式中,自动仓库100能够将多个集装箱120沿上下方向堆叠来进行保管。沿上下方向堆叠成一列的多个集装箱120例如被货架130支承到相对于地板10而言的预先决定的高度。由此,被货架130支承的集装箱120的下方的空间能够被用作其它集装箱120的搬运路径。
[0094]
在本实施方式中,自动仓库100以如下方式保管由特定的货架130支承的多个集装箱120:(i)越先被保管在该特定的货架130中的集装箱120在该特定的货架130中配置于越上方;(ii)在该特定的货架130中配置于越下方的集装箱120越先从该特定的货架130被取出。例如,新保管在特定的货架130中的集装箱120配置于在该特定的货架130中堆叠成一列的多个集装箱120的最下部。另外,在特定的货架130中堆叠成一列的多个集装箱120从配置于最下部的集装箱120起依次被取出。
[0095]
此外,在自动仓库100中,有时使集装箱120在多个货架130之间移动。因此,需注意的是,在沿上下方向堆叠成一列的、保管在特定的货架130中的多个集装箱120中,在时间上先进入自动仓库100的集装箱120未必配置为比在时间上后进入自动仓库100的集装箱120靠上方。
[0096]
在本实施方式中,在将集装箱120在货架130与搬运车140之间移载的工序中,对集装箱120的位置和姿势中的至少一方进行调整。例如,对集装箱120与货架130的相对位置关系(有时称为相对位置)以及集装箱120的基准面与货架130的基准面所形成的角度中的至少一方进行调整。例如,通过使集装箱120以沿大致铅直方向延伸的旋转轴为中心进行旋转来对集装箱120的基准面与货架130的基准面所形成的角度进行调整。上述的旋转轴既可以配置于集装箱120的内部,也可以配置于集装箱120的外部。
[0097]
例如通过搬运车140的动作来调整集装箱120的位置和姿势中的至少一方。作为搬运车140的动作,例示出搬运车140的移动动作、集装箱120的升降动作以及集装箱120的旋转动作中的至少一者。
[0098]
根据一个实施方式,通过搬运车140的移动来调整集装箱120的位置和姿势中的至少一方。作为搬运车140的移动,可例示出平移、旋转移动、转弯移动等。例如,通过搬运车140的平移来调整集装箱120与货架130的相对位置。另外,通过搬运车140的旋转运动或转弯运动来调整集装箱120的基准面与货架130的基准面所形成的角度。
[0099]
根据另一实施方式,搬运车140具有使搭载集装箱120的搭载面沿大致水平方向旋转的旋转机构,通过该旋转机构的动作来调整集装箱120的位置和姿势中的至少一方。上述的旋转机构既可以被组入到使上述的搭载面沿大致铅直方向移动的升降装置,也可以配置于该升降装置的下部,还可以配置于该升降装置与该搭载面之间。
[0100]
并且,根据另一实施方式,通过搬运车140的移动和上述的旋转机构的动作来调整集装箱120的位置和姿势中的至少一方。例如,通过搬运车140的平移来调整集装箱120与货架130的相对位置。另外,通过上述的旋转机构的动作来调整集装箱120的基准面与货架130的基准面所形成的角度。也可以通过搬运车140的旋转运动或转弯运动与上述的旋转机构的动作的组合来调整集装箱120的基准面与货架130的基准面所形成的角度。
[0101]
如上所述,货架130的形状和大小被设计成:在集装箱120的位置和姿势中的至少一方满足特定的条件的情况下,集装箱120能够沿上下方向自由地移动。因此,在集装箱120的移载工序中,通过调整集装箱120的位置和姿势中的至少一方,能够在以下状态之间切换:(i)货架130支承集装箱120,集装箱120在上下方向上的移动被货架130限制;(ii)货架130不支承集装箱120,集装箱120在上下方向上的移动不被货架130限制。上述的状态的切换的详情在后面叙述。
[0102]
根据本实施方式,例如,通过对新保管的集装箱120的旋转和升降进行调整,来将集装箱120保存在货架130中。另外,通过对已经保管的集装箱120的旋转和升降进行调整,来将集装箱120从货架130取出。集装箱120的保存过程和取出过程的详情在后面叙述。
[0103]
[自动仓库100的各部的概要]
[0104]
[集装箱120]
[0105]
在本实施方式中,1个以上的集装箱120中的各集装箱120用于容纳1个以上的物品。例如考虑物品的保管效率和处理的容易性来决定集装箱120的材质、形状以及大小。集装箱120的形状和大小没有特别限制,例如宽度为20cm~1m,高度为20cm~1m,深度为20cm~1m。集装箱120的详情在后面叙述。
[0106]
[货架130]
[0107]
在本实施方式中,1个以上的货架130中的各货架130支承1个以上的集装箱120。例
如,货架130支承堆叠成一列的多个集装箱120。
[0108]
在一个实施方式中,货架130从下方支承堆叠成一列的多个集装箱120中的、位于最下部的集装箱120。由此,货架130能够将堆叠成一列的多个集装箱120全部支承。
[0109]
在另一实施方式中,在构成为一个集装箱120的下部与其它集装箱120的上部能够连结或能够装卸的情况下,货架130可以从下方支承堆叠成一列的多个集装箱120中的配置于任意位置的集装箱120。由此,货架130能够将堆叠成一列的多个集装箱120全部支承。
[0110]
在上述的2个实施方式中,货架130也可以从下方支承构成堆叠成一列的多个集装箱120的一部分的、2个以上的集装箱120。由此,货架130能够将堆叠成一列的多个集装箱120全部支承。
[0111]
在本实施方式中,多个货架130中的各货架130将1个以上的集装箱120支承在地板10的上方的位置。如图2所示,例如,地板10与被货架130支承的1个以上的集装箱120中的配置在最下部的集装箱120的底面之间的距离h22大于地板10与搭载于搬运车140的至少1个集装箱120中的配置在最上部的集装箱120的上表面之间的距离h24。由此,1个以上的搬运车140中的各搬运车140能够以搭载了至少1个集装箱120的状态在被1个以上的货架130支承的多个集装箱的下方行进。
[0112]
(框架222)
[0113]
在本实施方式中,货架130的框架222从下方支承集装箱120的外侧的一部分,由此将集装箱120支承于规定的位置。框架222既可以从下方支承集装箱120的外侧的底面的一部分,也可以从下方支承集装箱120的外侧的侧面的一部分。框架222可以以至少2个点支承集装箱120。框架222也可以以3个点支承集装箱120,还可以以4个点支承集装箱120。框架222也可以以5个以上的点的位置支承集装箱120。
[0114]
如上所述,搭载了预先决定的个数的集装箱120的搬运车140能够借助空间324来使上述的集装箱120在货架130的外部与空间322的内部之间移动。因此,在本实施方式中,货架130的框架222配置于如下的位置,该位置是被货架130支承的1个以上的集装箱120的位于最下部的集装箱120不限制至少1个集装箱120在货架130的外部与空间322之间的移动的位置。
[0115]
由此,上述的距离h22大于上述的距离h24。另外,即使在货架130支承着集装箱120的情况下,货架130的框架222也能够使搭载了至少1个集装箱120的1个以上的搬运车140中的至少1个搬运车140在被货架130支承的1个以上的集装箱120的位于最下部的集装箱120的下方行进。
[0116]
在一个实施方式中,以如下方式决定框架222与地板10的距离:在框架222支承被货架130支承的1个以上的集装箱120中的、位于最下部的集装箱120的情况下,搭载了预先决定的第一个数的集装箱120的搬运车140能够在被货架130支承的1个以上的集装箱120的下方行进。在另一实施方式中,以如下方式决定框架222与地板10的距离:在由框架222直接支承的集装箱120的下方连结有预先决定的第二个数的集装箱120的情况下,搭载了预先决定的第一个数的集装箱120的搬运车140能够在被货架130支承的1个以上的集装箱120的下方行进。
[0117]
在又一实施方式中,框架222与地板10的距离可以动态地变更。例如,通过配置于框架支撑件224的致动器(未图示。)来变更框架222在上下方向上的位置。由此,防止货架
130的框架222或被货架130支承的集装箱120与搭载于搬运车140的集装箱的撞击。
[0118]
如上所述,在集装箱120的移载工序中,通过调整集装箱120的位置和姿势中的至少一方,能够在以下状态之间切换:(i)货架130支承集装箱120,集装箱120在上下方向上的移动被货架130限制;(ii)货架130不支承集装箱120,集装箱120在上下方向上的移动不被货架130限制。根据本实施方式,通过在利用框架支撑件224将框架222的位置和姿势固定的状态下由搬运车140对集装箱120的位置和姿势中的至少一方进行调整,来在以下状态之间切换:(i)集装箱120在上下方向上的移动被框架222限制;(ii)集装箱120在上下方向上的移动不被框架222限制。
[0119]
在本实施方式中,框架222配置于以下位置,该位置是在集装箱120的基准面126与框架支撑件224的基准面226所形成的角度满足预先决定的条件的情况下限制配置于空间322的内部的集装箱120在上下方向上的移动的位置。在该情况下,例如,框架222对于集装箱120向下方向的移动而言成为障碍,由此集装箱120被货架130支承。
[0120]
另外,框架222配置于以下位置,该位置是在基准面126与基准面226所形成的角度不满足预先决定的条件的情况下不限制配置于空间322的内部的集装箱120在上下方向上的移动的位置。在该情况下,框架222对于集装箱120在上下方向上的移动而言不成为障碍,因此配置于空间322的内部的集装箱120能够沿上下方向自由地移动。
[0121]
基准面126与基准面226所形成的角度可以是在使基准面126的法线矢量的起始点与基准面226的法线矢量的起始点重合的情况下由这2个法线矢量形成的角度中的0度以上且180度以下的一方的角度。预先决定的条件可以是以下条件:基准面126与基准面226所形成的角度处于预先决定的数值范围的范围内。关于上述的数值范围,既可以仅决定上限值,也可以仅决定下限值,还可以决定上限值和下限值。
[0122]
例如,基于集装箱120的外观形状和大小、货架130的外观形状和大小、与集装箱120的装载时间和取出时间中的至少一方有关的目标值、耐震性能的目标值、将集装箱120保存到货架130时的定位精度的目标值、以及集装箱120的有效利用的程度的目标值中的至少1个,来决定上述的数值范围。耐震性能可以被定义为货架130能够支承沿上下方向堆叠的预先决定的个数的集装箱120而不使该预先决定的个数的集装箱120倒塌的地震的规模。作为地震的规模,可例示出该地震的烈度或最大加速度。
[0123]
可以基于集装箱120的容纳空间的体积(有时称作vs。)和形成于容纳空间的内部的无用空间的体积(有时称作vd。)来决定集装箱120的有效利用的程度。集装箱120的有效利用的程度越大,则vd相对于vs的比例越小。集装箱120的有效利用的程度例如也可以被定义为vs/(vs vd)或vs/vd。
[0124]
可以以如下方式决定上述的数值范围:与上述的装载时间和取出时间中的至少一方有关的目标值越大,则上述的数值范围的上限值越大。可以以如下方式决定上述的数值范围:耐震性能的目标值越大,则上述的数值范围的下限值越大。可以以如下方式决定上述的数值范围:上述的定位精度的目标值越大,则上述的数值范围的幅度越窄。
[0125]
例如,当集装箱120的截面形状的外切圆的直径在集装箱120的侧面的延伸方向(有时称作轴向。)上的变动大时,即使上述的角度小,也能够确保足够的耐震性能。另外,在集装箱120被货架130支承着的状态下集装箱120与货架130的接触面积越大,耐震性能越高。例如,根据图3所示的实施方式,上述的角度越大,则集装箱120与货架130的接触面积越
大。
[0126]
当集装箱120的旋转速度固定时,若上述的角度小,则能够相应地缩短集装箱120的装载时间和取出时间。另外,当集装箱120的装载时间和取出时间的目标值固定时,若上述的角度小,则能够相应地减小集装箱120的旋转速度。若集装箱120的旋转速度小,则相应地抑制集装箱120的装载时或取出时的集装箱120的倒塌。
[0127]
集装箱120的轴向可以是与集装箱120的底面大致垂直的方向或从集装箱120的底面朝向开口的方向。集装箱120的轴向也可以是集装箱120的容纳空间的深度方向,还可以是集装箱120被保管于货架130的状态下的上下方向。
[0128]
集装箱120的基准面126优选为在集装箱120被保管于货架130的情况下与地板10大致垂直地配置的面。集装箱120的基准面126也可以是在集装箱120被保管于货架130的情况下基准面126的法线矢量与铅直方向所形成的角度为约90度的面。货架130的基准面226优选为在货架130设置于地板10之上的情况下与地板10大致垂直地配置的面。货架130的基准面226也可以是在货架130设置于地板10之上的情况下基准面226的法线矢量与铅直方向所形成的角度为约90度的面。
[0129]
如图3所示,在本实施方式中,框架222具有4根梁构件。在本实施方式中,4根梁构件中的各梁构件被支承于2根框架支撑件224。4根梁构件中的各梁构件可以被配置成:该梁构件的延伸方向与所述2根框架支撑件224的延伸方向大致垂直。另外,如上所述,4根梁构件中的各梁构件可以配置于以下的位置,该位置是该梁构件的下端与设置面的距离大于搭载了预先决定的个数的集装箱120的搬运车140通行所需的高度的位置。
[0130]
如图3所示,框架222或构成框架222的梁构件的高度hf可以小于集装箱120的切口部124的高度。由此,多个切口部124中的各切口部124的一部分能够被嵌入到货架130。其结果,能够抑制集装箱120因上下方向的振动或水平方向的振动而翻倒或倒塌。
[0131]
(框架支撑件224)
[0132]
在本实施方式中,货架130的框架支撑件224配置于框架222与地板10之间。框架支撑件224将框架222所承受的1个以上的集装箱120的荷载传递到地板10。框架支撑件224将框架222配置于上述的规定的高度。
[0133]
如图3所示,在本实施方式中,货架130具有4根框架支撑件224。4根框架支撑件224中的各框架支撑件224可以具有柱状形状。4根框架支撑件224中的各框架支撑件224可以被配置成一方的端部与地板10接触。
[0134]
例如以下面的方式决定4根框架支撑件224的配置:在地板10的表面外切于4根框架支撑件224的四边形的对角线的长度大于集装箱120的第一外切圆的直径或搬运车140的最小旋转直径。第一外切圆和最小旋转直径的详情在后面叙述。
[0135]
可以以下面的方式决定4根框架支撑件224的配置:上述的四边形的各边的长度小于集装箱120的第一外切圆的直径或搬运车140的最小旋转直径。可以以下面的方式决定4根框架支撑件224的配置:上述的四边形的各边的长度的最大值大于搭载了集装箱120的搬运车140通行所需的宽度。
[0136]
集装箱120的第一外切圆可以是以集装箱120的开口为上且以使集装箱120的底面水平的方式配置并且外切于以穿过集装箱120的切口部124的上端的水平面剖切集装箱120的外周而得到的截面形状(有时称作第一截面形状。)的圆。搬运车140的最小旋转直径可以
是在搬运车140将方向盘操作到最大来转弯的情况下或者在搬运车140以大致垂直于地板10的轴为中心来原地旋转的情况下搬运车140的位于最外侧的部位所描绘的圆的直径。上述的地板10的表面可以是大致平面。
[0137]
(钢丝232)
[0138]
在本实施方式中,将货架130的钢丝232配置成比框架222靠上方。货架130也可以具有多个钢丝232。多个钢丝232也可以配置于呈矩阵状地配置的多个货架130的各列或各行的上方。多个钢丝232也可以配置于呈矩阵状地配置的多个货架130的多个列的一部分列或多个行的一部分行的上方。一个或多个钢丝232可以被配置成包围呈矩阵状地配置的多个货架130的外周的上方。由此,能够抑制被货架130支承的1个以上的集装箱120的翻倒或倒塌。
[0139]
也可以是,在呈矩阵状地配置的多个货架130的同一列或同一行的上方配置有设置高度不同的多个钢丝232。由此,能够进一步抑制被货架130支承的1个以上的集装箱120的翻倒或倒塌。
[0140]
(钢丝支撑件234)
[0141]
在本实施方式中,货架130的钢丝支撑件234支承一个或多个钢丝232。钢丝支撑件234将一个或多个钢丝232配置于规定的高度。货架130也可以具有多个钢丝支撑件234。由此,能够抑制被货架130支承的1个以上的集装箱120的翻倒或倒塌。
[0142]
[搬运车140]
[0143]
在本实施方式中,搬运车140将至少1个集装箱120在第一位置与第二位置之间搬运。第一位置和第二位置可以是自动仓库100的内部的不同的位置。在本实施方式中,搬运车140在与货架130之间移载集装箱120。在一个实施方式中,搬运车140将集装箱120装载到货架130。在另一实施方式中,搬运车140将集装箱120从货架130取出。
[0144]
在本实施方式中,搬运车140能够使集装箱120沿上下方向移动。例如,搬运车140在货架130之下行进时,将集装箱120维持在比较低的位置(有时被称为行进位置。)。另一方面,搬运车140在将集装箱120装载到货架130或将集装箱120从货架130取出时,使集装箱120上下移动。
[0145]
如图2所示,搬运车140可以包括:搬运车242,其将集装箱120在货架130与拣选装置150之间搬运;以及搬运车244,其将集装箱120从拣选装置150搬运到自动仓库100的内部或外部的其它场所。搬运车242和搬运车244既可以具有相同的结构,也可以具有不同的结构。搬运车140的详情在后面叙述。
[0146]
[拣选装置150]
[0147]
在本实施方式中,拣选装置150将物品在一个集装箱120与其它集装箱120之间移载。在一个实施方式中,拣选装置150取出搭载于搬运车242的集装箱120中容纳的物品,将该物品容纳到搭载于搬运车244的集装箱120。在另一实施方式中,拣选装置150取出搭载于搬运车244的集装箱120中容纳的物品,将该物品容纳到搭载于搬运车242的集装箱120。
[0148]
[管理服务器160]
[0149]
在本实施方式中,管理服务器160对物品的保管状况进行管理。管理服务器160也可以对自动仓库100的各部进行管理。例如,管理服务器160对自动仓库100的各部的状态进行管理。管理服务器160也可以对1个以上的搬运车140各自的运转进行管理。管理服务器
160也可以对1个以上的货架130各自的运转进行管理。
[0150]
地板10可以是设置面的一例。自动仓库100可以是保管系统的一例。集装箱120可以是1个以上的集装箱的一例。集装箱120可以是至少1个集装箱的一例。集装箱120可以是第一集装箱、第二集装箱或第三集装箱的一例。切口部124的上表面可以是第一区域的一部分。切口部124的侧面可以是第二区域的一部分。基准面126可以是1个以上的集装箱的侧面构件的基准面的一例。货架130可以是支架的一例。搬运车140可以是搬运机器人的一例。管理服务器160可以是运转管理部的一例。
[0151]
框架222可以是支承部和梁构件的一例。框架222可以是多个支承部的一例。构成框架222的多个梁构件中的各梁构件可以是支承部的一例。框架支撑件224可以是基础部和支柱构件的一例。基准面226可以是支架的基准面的一例。基准面226可以是多个基础部中的至少1个基础部的基准面的一例。钢丝232可以是翻倒防止构件的一例。钢丝支撑件234可以是翻倒防止构件的一例。搬运车242可以是搬运机器人的一例。搬运车244可以是搬运机器人的一例。空间322可以是升降空间的一例。
[0152]
在本实施方式中,以框架222由4根梁构件构成的情况为例,说明了框架222的详情。然而,框架222不限定于本实施方式。在另一实施方式中,框架222可以是具有开口的板状构件。
[0153]
在本实施方式中,以构成框架222的各梁构件的外观形状为四棱柱状的情况为例,说明了货架130的详情。然而,梁构件的外观形状不限定于四棱柱状。在另一实施方式中,梁构件的外观形状可以是具有任意的截面形状的柱状。梁构件的截面形状既可以由直线构成,也可以是,梁构件的截面形状的至少一部分包含曲线。在梁构件的截面形状为多边形的情况下,既可以是该多边形的全部内角为大致直角,也可以是该多边形的内角的至少一部分为锐角。在梁构件的截面形状为多边形、且该多边形的全部内角为大致直角的情况下,例如,在框架222的上表面形成高度差。例如,在梁构件的截面形状为l字型的情况下,在框架222的上表面形成高度差。在梁构件的截面形状为多边形、且该多边形的内角的至少一部分为锐角的情况下,例如,在框架222的上表面形成斜面。
[0154]
在本实施方式中,以框架222被嵌入到集装箱120的切口部124从而框架222从下方支承集装箱120的情况为例,说明了货架130的详情。然而,货架130不限定于本实施方式。在另一实施方式中,框架222也可以从下方支承从集装箱120的侧面朝向集装箱120的外侧突出的突出部。上述的突出部既可以配置于集装箱120的上端附近,也可以配置于集装箱120的下端附近,还可以配置于集装箱120的上端及下端中间部分。此外,构成切口部124的面中的与框架222接触的面可以是上述的突出部的一例。
[0155]
在本实施方式中,以框架222从下方支承集装箱120的情况为例,说明了货架130的详情。然而,货架130不限定于本实施方式。在另一实施方式中,在集装箱120的基准面126与框架支撑件224的基准面226所形成的角度满足预先决定的条件的情况下,配置于集装箱120的外周的一个或多个凸部的至少一部分进入在2根以上的框架支撑件224分别形成的凹部,框架支撑件224的凹部从下方支承集装箱120的凸部,由此货架130支承集装箱120。此外,在该情况下,货架130既可以具有作为梁构件发挥功能的框架222,也可以不具有框架222。
[0156]
在本实施方式中,以在呈矩阵状地配置的多个货架130之下呈网格状地形成集装
箱120的搬运路径的情况为例,说明了集装箱120的搬运路径的详情。然而,集装箱120的搬运路径的形状不限定于本实施方式。在另一实施方式中,也可以在配置成列状的多个货架130之下形成线状的搬运路径,也可以在配置成矩阵状的多个货架130之下形成多个线状的搬运路径。
[0157]
[自动仓库100的各部的具体结构]
[0158]
自动仓库100的各部既可以通过硬件来实现,也可以通过软件来实现,还可以通过硬件和软件来实现。自动仓库100的各部的至少一部分既可以通过单个服务器来实现,也可以通过多个服务器来实现。自动仓库100的各部的至少一部分也可以在虚拟服务器上或云系统上实现。
[0159]
自动仓库100的各部的至少一部分也可以通过个人计算机或便携终端来实现。作为便携终端,能够例示出便携电话、智能电话、pda、平板、笔记本计算机或膝上型计算机、可穿戴计算机等。自动仓库100的各部也可以利用区块链等分散型脚本技术或分散型网络来保存信息。
[0160]
在通过软件来实现构成自动仓库100的结构要素的至少一部分的情况下,关于通过该软件实现的结构要素,在一般性的结构的信息处理装置中,可以通过启动规定了与该结构要素有关的动作的程序来实现该结构要素。上述的一般性的结构的信息处理装置可以具备:(i)具有cpu、gpu等处理器、rom、ram、通信接口等的数据处理装置;(ii)键盘、指示设备、触摸面板、照相机、声音输入装置、手势输入装置、各种传感器、gps接收器等输入装置;(iii)显示装置、声音输出装置、振动装置等输出装置;以及(iv)存储器、hdd、ssd等存储装置(包括外部存储装置)。
[0161]
在上述的一般性的结构的信息处理装置中,上述的数据处理装置或存储装置可以存储上述的程序。通过由处理器执行上述的程序,来使上述的信息处理装置执行该程序所规定的动作。上述的程序也可以保存在非暂时性计算机可读记录介质中。上述的程序既可以存储在cd
‑
rom、dvd
‑
rom、存储器、硬盘等计算机可读介质中,也可以存储在与网络连接的存储装置中。
[0162]
上述的程序可以是用于使计算机作为自动仓库100或其一部分来发挥功能的程序。上述的程序可以具备规定了自动仓库100的各部的动作的模块。这些程序或模块作用于数据处理装置、输入装置、输出装置、存储装置等,使计算机作为自动仓库100的各部来发挥功能、或者使计算机执行自动仓库100的各部中的信息处理方法。
[0163]
上述的程序可以从计算机可读介质或与网络连接的存储装置安装到构成自动仓库100的至少一部分的计算机。通过执行上述的程序,计算机可以作为自动仓库100的各部的至少一部分来发挥功能。通过将上述的程序读入到计算机,该程序中描述的信息处理作为同该程序关联的软件与自动仓库100或其一部分的各种硬件资源进行协作的具体方案来发挥功能。而且,上述的具体方案实现本实施方式中的与计算机的使用目的相应的信息的运算或加工,由此,与该使用目的相应的自动仓库100被构建出来。
[0164]
上述的程序可以是用于使计算机执行自动仓库100或其一部分中的信息处理方法的程序。上述的信息处理方法可以是控制货架130的动作的方法。上述的信息处理方法可以是对设置货架130的框架222的位置进行调整的方法。上述的信息处理方法可以是控制搬运车140的动作的方法。上述的信息处理方法可以是搬运车140将集装箱120装载到货架130的
方法。上述的信息处理方法也可以是搬运车140将集装箱120从货架130取出的方法。上述的信息处理方法也可以是管理服务器160对货架130和搬运车140中的至少一方进行控制的方法。
[0165]
上述的信息处理方法可以是控制搬运机器人的动作的控制方法,该搬运机器人具备能够搭载至少1个所述集装箱的搭载部、使所述搭载部沿上下方向移动的升降部以及使所述搬运机器人移动的移动部。上述的控制方法例如具有以下过程:移动部使搬运机器人移动,将集装箱搬运到支架的升降空间的内部。上述的控制方法例如具有以下过程:移动部使搬运机器人移动,以使集装箱的基准面与支架的基准面所形成的角度不满足预先决定的条件的方式调整集装箱的位置。上述的控制方法例如具有以下过程:升降部使搭载部向上方移动,将集装箱的第一区域的下端配置为比支架的多个支承部的上端靠上方。上述的控制方法例如具有以下过程:移动部使搬运机器人移动,以使集装箱的基准面与支架的基准面所形成的角度满足预先决定的条件的方式调整集装箱的位置。
[0166]
上述的控制方法可以包括以下过程:移动部使搬运机器人移动到支架的升降空间的内部。可以包括以下过程:移动部使搬运机器人移动,将搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱的位置调整为被支架支承着的集装箱的下方的特定的位置。可以包括以下过程:升降部使搭载部向上方移动,从而搭载部或搭载于搭载部的至少1个集装箱的位于最上部的集装箱支承被支架支承着的集装箱。可以包括以下过程:移动部使搬运机器人移动,以使第一集装箱的基准面与支架的基准面所形成的角度不满足预先决定的条件的方式调整集装箱的位置。可以包括以下过程:升降部使搭载部向下方移动,从而被支架支承着的集装箱的第一区域的上端配置为比支架的多个支承部的下端靠下方。
[0167]
使用图4、图5、图6、图7以及图8来说明一个实施方式所涉及的集装箱120的详情。另外,使用图6、图7以及图8来说明集装箱120的外观形状和货架130的外观形状的关系。
[0168]
图4概要性地表示集装箱120的一例。图5概要性地表示集装箱120的a
‑
a'截面处的截面形状的一例。图6概要性地表示集装箱120的b
‑
b'截面处的截面形状的一例。图7概要性地表示集装箱120的c
‑
c'截面处的截面形状的一例。图8概要性地表示集装箱120与钢丝232的位置关系的一例。
[0169]
如图4所示,在本实施方式中,集装箱120具备底板422、侧壁424以及罩430。由此,在集装箱120的内部形成用于容纳物品的容纳空间440。另外,在本实施方式中,在侧壁424的外侧配置多个切口部124。侧壁424的一部分被用作集装箱120的基准面126。
[0170]
在本实施方式中,底板422堵塞在侧壁424的一方的端部形成的开口。底板422的一部分可以构成集装箱120的侧面的一部分。在本实施方式中,在侧壁424的至少一部分具有中空柱状的形状。侧壁424被配置成向底板422的一方的面这一侧延伸。侧壁424的延伸方向(有时称作轴向。)可以与在底板422的至少一部分配置的平面的法线方向大致平行。
[0171]
在本实施方式中,罩430构成切口部124的外形。在本实施方式中,罩430被配置成从侧壁424的内侧的面朝向集装箱120的内侧突出。在本实施方式中,罩430例如具有构成切口部124的上表面的构件、构成切口部124的下表面的构件以及构成切口部124的侧面的构件。构成切口部124的上表面的构件、构成切口部124的下表面的构件以及构成切口部124的侧面的构件中的各构件既可以是平面构件,也可以是曲面构件,还可以是平面构件与曲面构件的组合。
[0172]
构成切口部124的上表面的构件的形状可以构成为与框架222的上表面的形状相符合。例如,在框架222的上表面为平面的情况下,构成切口部124的上表面的构件可以是平板。在框架222的上表面配置凸部和凹部中的至少一方的情况下,构成切口部124的上表面的构件可以具有与框架222的凸部对应的凹部以及与框架222的凹部对应的凸部中的至少一方。
[0173]
如图5所示,在本实施方式中,侧壁424的下端512与底板422接触。侧壁424的上端514构成集装箱120的开口。在本实施方式中,在底板422的外侧配置凸部522。可以基于集装箱120的开口的形状和大小来决定凸部522的形状和大小。
[0174]
例如,凸部522的大小小于集装箱120的开口的大小。在该情况下,集装箱120的下端的从集装箱120的底面的外缘到凸部522的距离wl小于集装箱120的上端的从集装箱120的侧面的外缘到开口的距离wu。由此,在2个集装箱120被上下堆叠的情况下,上方的集装箱120的凸部522被嵌入到下方的集装箱120的开口。其结果,能够抑制集装箱120的翻倒或倒塌。
[0175]
在本实施方式中,侧壁424沿着侧壁424的轴向具有区域542、区域544以及区域546。区域542、区域544以及区域546中的各区域可以是沿侧壁424的轴向延伸的区域。区域542与区域544相邻地配置。区域544与区域542及区域546相邻地配置。在本实施方式中,区域542配置于比区域544更接近底板422的位置。区域546配置于比区域544更远离底板422的位置。
[0176]
在本实施方式中,在区域544形成切口部124。在区域544形成有在集装箱120被货架130支承的情况下与货架130接触的面552。由此,货架130能够从下方支承集装箱120的面552,由此将集装箱120保持于规定的高度。
[0177]
区域544的高度hd(有时称作切口部124的高度)可以大于图3所示的框架222的高度hf。由此,多个切口部124中的各切口部124的一部分能够被嵌入到货架130。其结果,能够抑制集装箱120因上下方向的振动或水平方向的振动而翻倒或倒塌。
[0178]
图6可以是以与侧壁424的轴向大致垂直的平面剖切侧壁424的区域546的情况下的截面图的一例。图6将区域546处的侧壁424的截面形状与货架130一起示出。图6表示集装箱120的基准面126与货架130的基准面226所形成的角度处于预先决定的数值范围的范围外且货架130不限制集装箱120在上下方向上的移动的状态下的、集装箱120的外形与货架130的外形的关系。此外,在本实施方式中,区域542处的侧壁424的截面形状具有与区域546处的侧壁424的截面形状同样的形状。
[0179]
如图6所示,根据本实施方式,由框架222的内侧的面形成开口。在本实施方式中,框架222的开口具有长边的长度为lx、短边的长度为ly的长方形的截面形状。
[0180]
此外,在本实施方式中,以使说明简单为目的,以框架222的开口的截面形状为长方形的情况为例,说明集装箱120与货架130的关系。然而,开口的截面形状不限定于本实施方式。在另一实施方式中,开口的截面形状也可以是正方形,还可以是四边形以外的多边形,也可以包含曲线形状。四边形的长边可以是多边形的边中的最长的边的一例。
[0181]
如图6所示,在本实施方式中,集装箱120配置于集装箱120整体收敛于框架222的开口的内部的位置。例如,集装箱120配置于外切圆600的中心602与框架222的开口的中心一致的位置。框架222的开口的中心可以是框架222的开口的截面形状的外切圆或内切圆的
中心。另外,可以在集装箱120与框架222的开口的短边之间形成间隙gx。可以在集装箱120与框架222的开口的长边之间形成间隙gy。
[0182]
如图6所示,侧壁424的区域546处的截面形状的外切圆600的直径大于框架222的开口的长边的长度lx。由此,通过使集装箱120以沿大致铅直方向延伸的旋转轴为中心进行旋转,能够在货架130限制集装箱120在上下方向上的移动的状态与货架130不限制集装箱120在上下方向上的移动的状态之间切换。
[0183]
图7可以是以与侧壁424的轴向大致垂直的平面剖切侧壁424的区域544的情况下的截面图的一例。图7将区域544处的侧壁424的截面形状与货架130一起示出。图7表示集装箱120的基准面126与货架130的基准面226所形成的角度处于预先决定的数值范围的范围内且货架130限制集装箱120在上下方向上的移动的状态下的、集装箱120的外形与货架130的外形的关系。图7表示在图6中将集装箱120逆时针旋转约15度后的状态。
[0184]
如上所述,在侧壁424的区域544,在集装箱120的四角形成有切口部124。因此,侧壁424的区域544处的截面形状的外切圆700的直径小于外切圆600的直径。由此,在集装箱120的区域544位于框架222的开口的内部的情况下,集装箱120所能够旋转的角度大于在集装箱120的区域542或区域546位于框架222的开口的内部的情况下集装箱120所能够旋转的角度。
[0185]
如上所述,外切圆600的直径大于框架222的开口的长边的长度lx。因此,通过在侧壁424的区域544位于框架222的开口的内部的状态下使集装箱120旋转,能够使切口部124的上表面(也就是说,区域546的下端。)向框架222的上方移动。由此,通过使集装箱120以沿大致铅直方向延伸的旋转轴为中心进行旋转,能够在货架130限制集装箱120在上下方向上的移动的状态与货架130不限制集装箱120在上下方向上的移动的状态之间切换。
[0186]
此外,外切圆600的中心602与外切圆700的中心702可以配置于侧壁424的延伸轴上的不同的位置。外切圆700的直径既可以大于框架222的开口的长边的长度lx,也可以与该长边的长度lx相等,还可以小于该长边的长度lx。外切圆700的直径既可以大于框架222的开口的短边的长度ly,也可以与该长边的长度ly相等,还可以小于该长边的长度ly。
[0187]
可以在切口部124的侧面与框架222的开口的短边之间形成间隙gx'。可以在切口部124的侧面与框架222的开口的长边之间形成间隙gy'。
[0188]
如图8所示,根据本实施方式,呈线状或矩阵状地配置的多个货架130中的各货架130支承沿上下方向堆叠成一列的多个集装箱120。在该情况下,由被相邻的2个货架130保持为大致相同高度的2个集装箱120各自的切口部124形成间隙。根据本实施方式,钢丝232配置于上述的间隙。由此,抑制集装箱120的翻倒或倒塌。
[0189]
底板422可以是底面构件的一例。侧壁424可以是侧面构件的一例。区域542可以是第一区域的一例。侧壁424的区域542的截面形状可以是第一截面形状的一例。区域544可以是第二区域的一例。侧壁424的区域544的截面形状可以是第二截面形状的一例。区域546可以是第一区域的一例。侧壁424的区域546的截面形状可以是第一截面形状的一例。外切圆600可以是第一外切圆的一例。外切圆700可以是第二外切圆的一例。
[0190]
在本实施方式中,以通过将凸部522配置于集装箱120的下部而能够抑制集装箱120的翻倒或倒塌的情况为例,说明了集装箱120的详情。然而,集装箱120不限定于本实施方式。作为集装箱120的另一例,多个集装箱120中的各集装箱120可以具有用于增加与沿上
下方向堆叠的其它集装箱120之间的连结强度的构件。
[0191]
在一个实施方式中,在2个集装箱120沿上下方向堆叠的情况下,在上方的集装箱120的下部设置的凸部被嵌入到在下方的集装箱120的上部设置的凹部。在另一实施方式中,在2个集装箱120沿上下方向堆叠的情况下,在下方的集装箱120的上部设置的凸部被嵌入到在上方的集装箱120的下部设置的凹部。作为上述的嵌入的方法,可例示出使至少一方的集装箱120沿轴向移动的方法、使至少一方的集装箱120沿大致水平方向滑动的方法、使至少一方的集装箱120沿大致水平方向旋转的方法等。
[0192]
在又一实施方式中,在上方的集装箱120的下部以及下方的集装箱120的上部,配置用于提高被连结的2个集装箱120的剪切强度和拉伸强度的构件。作为提高剪切强度和拉伸强度的构件,可例示出磁力产生材料、表面胶带、粘接剂等。作为磁力产生材料,可例示出磁体与磁体的组合、磁体与铁的组合等。例如,在上方的集装箱120的下部配置磁片,在下方的集装箱120的上部配置铁片。
[0193]
图9概要性地表示搬运车140的一例。在本实施方式中,搬运车140具备升降台902、升降装置904以及车辆主体906。在本实施方式中,在升降台902形成凹部920。在本实施方式中,升降装置904具有受电弓942和致动器944。在本实施方式中,车辆主体906具有控制部960、感测部962、通信部964以及电源966。车辆主体906可以具有车轮980、驱动轮982以及马达984。
[0194]
在本实施方式中,升降台902能够搭载至少1个集装箱120。在本实施方式中,升降装置904使升降台902沿上下方向移动。在本实施方式中,车辆主体906从一个位置移动至其它位置。车辆主体906可以移动到由管理服务器160指定的位置。
[0195]
在本实施方式中,凹部920配置于用于搭载集装箱120的搭载面,用于集装箱120的定位。基于集装箱120的底部的形状和大小来决定凹部920的形状和大小。凹部920的形状和大小可以构成为与集装箱120的底部的形状和大小相符合。
[0196]
例如,凹部920的大小大于集装箱120的凸部522的大小。凹部920的形状和大小也可以与集装箱120的开口的形状和大小大致相同。由此,在集装箱120搭载于升降台902的情况下,集装箱120的凸部522被嵌入到升降台902的凹部920。由此,抑制集装箱120的搬运工序、保存工序或取出工序中的集装箱120的搭载位置的变动。
[0197]
在本实施方式中,受电弓942支承升降台902。致动器944对受电弓942进行驱动来使升降台902上升或下降。
[0198]
在本实施方式中,控制部960对搬运车140的动作进行控制。例如,控制部960控制搬运车140对集装箱120的搬运。控制部960可以控制搬运车140对集装箱120的位置和朝向中的至少一方的调整。控制部960可以控制搬运车140对集装箱120的升降。
[0199]
在本实施方式中,控制部960控制搬运车140的各部,将特定的集装箱120保存到特定的货架130。控制部960可以控制搬运车140的各部来从特定的货架130取出特定的集装箱120。控制部960的详情在后面叙述。
[0200]
在本实施方式中,感测部962具备各种传感器。感测部962可以具备用于获取表示搬运车140的位置的信息的位置传感器。感测部962可以具备检测施加于升降台902的荷载的荷载传感器。感测部962也可以具备检测升降台902的移动量的升降量传感器。
[0201]
作为位置传感器,例示出(i)测定与自动仓库100的壁20之间的距离的测距传感
器、(ii)获取对地板10的特定的位置赋予的表示该位置的信息的传感器等。上述的传感器也可以是照相机,也可以是磁传感器,也可以是信标接收机。
[0202]
在本实施方式中,通信部964与货架130、其它搬运车140、拣选装置150及管理服务器160中的至少一者之间发送接收信息。在集装箱120具备通信设备的情况下,通信部964也可以与集装箱120之间发送接收信息。通信部964与其它设备之间的通信方式没有特别限定。
[0203]
在本实施方式中,电源966向搬运车140的各部供给电力。电源966可以具备发电装置和蓄电装置中的至少一方。
[0204]
在本实施方式中,车轮980和驱动轮982支承搬运车140。马达984对驱动轮982进行驱动来使搬运车140移动。马达984可以将左右的驱动轮982彼此独立地驱动。由此,搬运车140能够原地旋转或转弯。
[0205]
升降台902可以是搭载部的一例。升降装置904可以是升降部的一例。车辆主体906可以是移动部、切换部以及控制装置的一例。控制部960可以是切换部和控制装置的一例。马达984可以是移动部的一例。
[0206]
图10概要性地表示控制部960的内部结构的一例。在本实施方式中,控制部960具备通信控制部1020、行进控制部1030以及升降装置控制部1040。
[0207]
在本实施方式中,通信控制部1020对搬运车140与外部的设备的通信进行控制。通信控制部1020也可以对通信部964的动作进行控制。
[0208]
在本实施方式中,行进控制部1030对搬运车140的移动进行控制。例如,行进控制部1030获取由感测部962中包括的位置传感器输出的信息。行进控制部1030基于由位置传感器输出的信息来估计搬运车140的位置。行进控制部1030基于搬运车140的估计位置来控制马达984,使搬运车140移动至目的地。行进控制部1030也可以控制马达984来使搬运车140原地旋转或转弯。
[0209]
在本实施方式中,升降装置控制部1040对升降装置904的动作进行控制。例如,升降装置控制部1040在货架130不限制集装箱120在上下方向上的移动的状态下控制升降装置904,来使升降台902向上方移动或向下方移动。
[0210]
在本实施方式中,以通过使车辆主体906原地旋转或转弯来调整搭载于搬运车140的集装箱120的朝向的情况为例,说明了搬运车140的详情。然而,搬运车140不限定于本实施方式。在另一实施方式中,升降台902或车辆主体906可以具有用于调整搭载于搬运车140的集装箱120的朝向的旋转机构。在该情况下,控制部960可以控制该旋转机构的动作来调整集装箱120的朝向。
[0211]
图11概要性地表示搬运车140与货架130的位置关系的一例。如图11所示,在本实施方式中,外切于4根框架支撑件224的四边形的对角线的长度大于搬运车140的最小旋转直径。如上所述,搬运车140的最小旋转直径可以是在搬运车140将方向盘操作到最大来转弯的情况下或者在搬运车140以大致垂直于地板10的轴为中心来原地旋转的情况下搬运车140的位于最外侧的部位所描绘的圆1100的直径。
[0212]
在外切于4根框架支撑件224的四边形的对角线的长度大于搬运车140的最小旋转直径的情况下,在圆1100与框架支撑件224之间形成间隙gv。由此,能够抑制以下情况:在搬运车140使集装箱120在由货架130形成的空间322的内部旋转的情况下,搬运车140的一部
分与框架支撑件224发生撞击。
[0213]
此外,在4根框架支撑件224的截面形状为多边形的情况下,上述的四边形可以是将4根框架支撑件224的角连结而形成的四边形中的最小的四边形。上述的四边形的形状既可以是长方形,也可以是正方形。优选的是,上述的四边形的长边的长度sx与该四边形的短边的长度sy之差小。可以以使上述的长度sx与sy之差小于预先决定的值的方式决定框架支撑件224的配置。
[0214]
在本实施方式中,上述的四边形的长边的长度sx小于搬运车140的最小旋转直径。同样地,上述的四边形的短边的长度sy小于搬运车140的最小旋转直径。并且,上述的四边形的长边的长度sx大于搭载了集装箱120的搬运车140通行所需的宽度。上述的四边形的短边的长度sy既可以大于搭载了集装箱120的搬运车140通行所需的宽度,也可以小于该宽度。
[0215]
此外,上述的四边形的对角线的长度也可以大于外切圆600的直径。上述的四边形的长边的长度sx可以小于外切圆600的直径。同样地,上述的四边形的短边的长度sy可以小于外切圆600的直径。
[0216]
另外,集装箱120可以以外切圆600的中心602及外切圆700的中心702与圆1100的中心1102大致一致的方式搭载于搬运车140。可以以使车轮980和驱动轮982收敛于圆1100的内侧的方式决定车轮980和驱动轮982在车辆主体906的设置位置。
[0217]
在本实施方式中,以在用于保管堆叠成一列的集装箱120的空间(有时称作保管空间。)的周围配置4根框架支撑件224的情况为例,说明了搬运车140与货架130的位置关系的详情。然而,货架130的构造不限定于本实施方式。
[0218]
在另一实施方式中,在保管空间的周围配置的框架支撑件224的根数也可以是0根,还可以是1根,还可以是2根,还可以是3根,还可以是5根以上。此外,框架支撑件224的外观形状也可以是柱状,还可以是板状,还可以是梯形状。
[0219]
例如,也可以利用在相向的位置配置的2个板状或梯形状的框架支撑件224代替4根柱状的框架支撑件224来形成单一的保管空间。也可以利用1个板状的框架支撑件224以及在与该板状的框架支撑件224相向的位置配置的2个柱状的框架支撑件224代替4根柱状的框架支撑件224来形成单一的保管空间。
[0220]
另外,在相向的一对框架支撑件224之间形成的保管空间的个数既可以是1个,也可以是2个以上。与在相向的一对框架支撑件224之间形成单一的保管空间的情况相比,在相向的一对框架支撑件224之间形成多个保管空间的情况下,在各保管空间的周围配置的框架支撑件224的根数变少。例如,利用(i)在相向的位置配置的2根板状的框架支撑件224或者在四边形的四角的位置配置的4根柱状的框架支撑件224、以及(ii)多个开口呈线状或矩阵状地配置的框架222,来在一对框架支撑件224之间形成多个保管空间。在该情况下,在各保管空间的周围配置的框架支撑件224的根数也不限定于4根。
[0221]
在保管空间的周围配置的框架支撑件224的根数为除4根以外的根数的情况下,也能够与结合图11说明的实施方式同样地抑制以下情况:在搬运车140使集装箱120在由货架130形成的空间322的内部旋转的情况下,搬运车140的一部分与框架支撑件224发生撞击。另外,只要是接触到本技术说明书的记载的本领域技术人员,就能够了解,能够通过与结合图11说明的实施方式同样的过程来设计搬运车140和货架130。
[0222]
在本实施方式中,以相邻的保管空间之间共享框架222和框架支撑件224的一部分的情况为例,说明了搬运车140与货架130的位置关系的详情。然而,货架130的构造不限定于本实施方式。在另一实施方式中,针对每个保管空间配置独立的货架130。在该情况下,也能够与结合图11说明的实施方式同样地抑制以下情况:在搬运车140使集装箱120在由货架130形成的空间322的内部旋转的情况下,搬运车140的一部分与框架支撑件224发生撞击。另外,只要是接触到本技术说明书的记载的本领域技术人员,就能够了解,能够通过与结合图11说明的实施方式同样的过程来设计搬运车140和货架130。
[0223]
在本实施方式中,以搬运车140通过使集装箱120在由货架130形成的空间322的内部旋转来调整集装箱120的姿势的情况为例,说明了搬运车140与货架130的位置关系的详情。然而,调整集装箱120的姿势的方法不限定于本实施方式。
[0224]
在另一实施方式中,搬运车140具有集装箱120的旋转机构(未图示),通过由搬运车140控制该旋转机构的动作,来调整集装箱120的姿势。在该情况下,也能够与结合图11说明的实施方式同样地抑制以下情况:在搬运车140使集装箱120在由货架130形成的空间322的内部旋转的情况下,搬运车140的一部分与框架支撑件224发生撞击。另外,只要是接触到本技术说明书的记载的本领域技术人员,就能够了解,能够通过与结合图11说明的实施方式同样的过程来设计搬运车140和货架130。
[0225]
[集装箱120的保存工序中的控制例]
[0226]
使用图12、图13、图14、图15以及图16来说明自动仓库100中的集装箱120的保存过程的详情。图12~图16表示在即将保存作为保存处理的对象的集装箱120的时间点货架130没有支承集装箱120的情况下的集装箱120的保存过程的一例。
[0227]
在本实施方式中,以使说明简单为目的,以保存单一的集装箱120的情况为例,说明集装箱120的保存过程的一例。然而,集装箱120的保存过程不限定于本实施方式。在另一实施方式中,可以一次保存多个集装箱120。
[0228]
根据本实施方式,首先,如图12所示,行进控制部1030控制马达984,来使搭载了集装箱120的搬运车140移动至作为目标的货架130的下方的位置。由此,集装箱120被搬运到作为目标的货架130的空间322的内部。
[0229]
接着,行进控制部1030控制马达984,来对搬运车140的位置进行微调整。具体地说,行进控制部1030对集装箱120的x方向及y方向的位置以及集装箱120的基准面126的法线方向的朝向进行调整。行进控制部1030可以以形成货架130不限制集装箱120在上下方向上的移动的状态的方式,对集装箱120的x方向及y方向的位置以及集装箱120的基准面126的法线方向的朝向进行调整。
[0230]
例如,行进控制部1030以使集装箱120的外切圆600的中心602与由货架130的框架222形成的开口的外切圆或内切圆的中心一致的方式,对集装箱120的x方向及y方向的位置进行调整。另外,行进控制部1030以使集装箱120的基准面126与作为目标的货架130的基准面226不满足预先决定的条件的方式,对集装箱120的基准面126的法线方向的朝向进行调整。
[0231]
接着,如图13所示,升降装置控制部1040控制致动器944,来使升降台902上升。升降装置控制部1040可以使升降台902上升,直到新保管的集装箱120的切口部124的上表面(也就是说,区域546的下端。)位于比框架222的上表面靠上方的位置为止。
[0232]
当新保管的集装箱120的切口部124的上表面到达比框架222的上表面靠上方的预先决定的位置时,升降装置控制部1040控制致动器944来停止升降台902的上升。此外,此时,上述的集装箱120的切口部124的下表面(也就是说,区域544的下端。)位于比框架222的下表面靠下方的位置。
[0233]
接着,如图14所示,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,集装箱120以大致垂直于地板10的轴为中心进行旋转。行进控制部1030可以以如下方式控制马达984:使集装箱120以外切圆600的中心602或7000的中心702为中心进行旋转。
[0234]
行进控制部1030使搬运车140旋转或转弯,直到成为货架130限制集装箱120在上下方向上的移动的状态为止。具体地说,以使集装箱120的基准面126与作为目标的货架130的基准面226满足预先决定的条件的方式,对集装箱120的基准面126的法线方向的朝向进行调整。由此,集装箱120和货架130的状态从货架130不限制集装箱120在上下方向上的移动的状态切换为货架130限制集装箱120在上下方向上的移动的状态。
[0235]
接着,如图15所示,升降装置控制部1040控制致动器944来使升降台902下降。由此,集装箱120的切口部124的上表面与框架222的上表面接触,框架222从下方支承集装箱120。其结果,作为保存作业的对象的集装箱120被保存到货架130。
[0236]
之后,如图16所示,升降装置控制部1040控制致动器944来使升降台902下降至行进位置。另外,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,搬运车140能够在2根框架支撑件224之间穿过从而从货架130的空间322的内部移动到货架130的外部。
[0237]
新保管的集装箱120可以是第二集装箱的一例。切口部124的上表面可以是第一区域的下端的一例。框架222的上表面可以是支承部的上端的一例。
[0238]
[集装箱120的保存工序中的控制例]
[0239]
使用图17、图18、图19、图20、图21、图22以及图23来说明自动仓库100中的集装箱120的保存过程的另一例。图17~图23表示在即将保存作为保存处理的对象的集装箱120的时间点货架130已经支承了1个以上的集装箱120的情况下的集装箱120的保存过程的一例。
[0240]
在本实施方式中,以使说明简单为目的,以保存单一的集装箱120的情况为例,说明集装箱120的保存过程的一例。然而,集装箱120的保存过程不限定于本实施方式。在另一实施方式中,可以一次保存多个集装箱120。
[0241]
根据本实施方式,首先,如图17所示,行进控制部1030控制马达984,来使搭载了集装箱120的搬运车140移动至作为目标的货架130的下方的位置。由此,集装箱120被搬运到作为目标的货架130的空间322的内部。
[0242]
接着,如图18所示,行进控制部1030控制马达984来对搬运车140的位置进行微调整。具体地说,行进控制部1030对集装箱120的x方向及y方向的位置以及集装箱120的基准面126的法线方向的朝向进行调整。行进控制部1030可以以使已经被货架130支承的1个以上的集装箱120的位于最下部的集装箱120(有时称作集装箱a。)的位置及朝向与新保管的集装箱120的位置及朝向一致的方式,对新保管的集装箱120的x方向及y方向的位置以及基准面126的法线方向的朝向进行调整。
[0243]
已经被货架130支承的1个以上的集装箱120以下面的状态保存于货架130:这些集装箱120的基准面126的朝向已被调整成基准面126与框架支撑件224的基准面226所形成的
角度满足预先决定的条件。因此,行进控制部1030控制马达984,以使集装箱a的外切圆600的中心602与新保管的集装箱120(有时称作集装箱b。)的外切圆600的中心602一致的方式对集装箱120的x方向及y方向的位置进行调整。另外,行进控制部1030控制马达984,以使集装箱b的基准面126与货架130的基准面226所形成的角度满足预先决定的条件的方式对集装箱b的基准面126的法线方向的朝向进行调整。由此,配合集装箱a地调整集装箱b的位置。
[0244]
接着,如图19所示,升降装置控制部1040控制致动器944,来使升降台902上升。升降装置控制部1040可以使升降台902上升,直到集装箱b的上端到达支承集装箱a的下端的位置为止。由此,集装箱b被配置于已经被货架130支承的1个以上的集装箱120的最下部。
[0245]
在集装箱b的上端支承集装箱a的下端的位置处,集装箱a的切口部124的上表面既可以与框架222的上表面接触,也可以不与框架222的上表面接触。优选的是,在集装箱b的上端支承集装箱a的下端的位置处,集装箱a的切口部124的上表面不与框架222的上表面接触,集装箱a的切口部124的下表面不与框架222的下表面接触。此外,在多个集装箱120搭载于搬运车140的情况下,升降装置控制部1040可以使升降台902上升,直到搭载于搬运车140的多个集装箱120中的、位于最上部的集装箱120的上端到达支承集装箱a的下端的位置为止。
[0246]
接着,如图20所示,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,堆叠成一列的多个集装箱120以大致垂直于地板10的轴为中心进行旋转。行进控制部1030可以以如下方式控制马达984:使集装箱120以外切圆600的中心602或7000的中心702为中心进行旋转。
[0247]
行进控制部1030以使堆叠成一列的多个集装箱120中的至少一个集装箱120(例如,集装箱b。)的基准面126与作为目标的货架130的基准面226不满足预先决定的条件的方式,对集装箱120的基准面126的法线方向的朝向进行调整。由此,集装箱120和货架130的状态从货架130限制集装箱120在上下方向上的移动的状态切换为货架130不限制集装箱120在上下方向上的移动的状态。
[0248]
接着,如图21所示,升降装置控制部1040控制致动器944,来使升降台902上升。升降装置控制部1040可以使升降台902上升,直到新的要被货架130支承的集装箱120(例如,集装箱b。)的切口部124的上表面(也就是说,区域546的下端。)位于比框架222的上表面靠上方的位置为止。
[0249]
当新的要被货架130支承的集装箱120的切口部124的上表面到达比框架222的上表面靠上方的预先决定的位置时,升降装置控制部1040控制致动器944来停止升降台902的上升。此外,此时,上述的集装箱120的切口部124的下表面(也就是说,区域544的下端。)位于比框架222的下表面靠下方的位置。
[0250]
接着,如图22所示,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,堆叠成一列的多个集装箱120以大致垂直于地板10的轴为中心进行旋转。行进控制部1030可以以如下方式控制马达984:使集装箱120以外切圆600的中心602或7000的中心702为中心进行旋转。
[0251]
行进控制部1030使搬运车140旋转或转弯,直到成为货架130限制集装箱120在上下方向上的移动的状态为止。具体地说,以使堆叠成一列的多个集装箱120中的至少一个集装箱120(例如,集装箱b。)的基准面126与作为目标的货架130的基准面226满足预先决定的
条件的方式,对集装箱120的基准面126的法线方向的朝向进行调整。由此,集装箱120和货架130的状态从货架130不限制集装箱120在上下方向上的移动的状态切换为货架130限制集装箱120在上下方向上的移动的状态。
[0252]
此外,行进控制部1030可以以使搬运车140的旋转或转弯的方向为与图20中的旋转或转弯的方向相反的方向的方式控制马达984。另外,行进控制部1030也可以以使搬运车140的旋转或转弯的角度的绝对值与图20中的旋转或转弯的角度的绝对值大致一致的方式控制马达984。
[0253]
接着,如图23所示,升降装置控制部1040控制致动器944来使升降台902下降。由此,新的要被货架130支承的集装箱120的切口部124的上表面与框架222的上表面接触,框架222从下方支承上述的集装箱120。其结果,作为保存作业的对象的集装箱120被保存到货架130。
[0254]
之后,升降装置控制部1040控制致动器944,来使升降台902下降至行进位置。另外,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,搬运车140能够在2根框架支撑件224之间穿过从而从货架130的空间322的内部移动到货架130的外部。
[0255]
集装箱a可以是第一集装箱的一例。集装箱b可以是第二集装箱的一例。新的要被支承的集装箱120可以是第二集装箱的一例。切口部124的上表面可以是第一区域的下端的一例。框架222的上表面可以是支承部的上端的一例。
[0256]
[集装箱120的取出工序中的控制例]
[0257]
图24概要性地表示集装箱120的取出过程的一例。图24表示从堆叠成一列的多个集装箱120中取出作为目标的集装箱120的过程的一例。
[0258]
根据本实施方式,首先,在步骤2422(有时将步骤简记为s。)中,通信部964接受来自管理服务器160的指示。上述的指示例如包含以下信息中的至少一者:(i)表示作业类别的信息、(ii)作为目标的货架130的识别信息、(iii)作为目标的货架130的位置信息、(iv)作为目标的集装箱120的识别信息、(v)作为目标的集装箱120的位置信息、(vi)表示位于作为目标的货架130的附近的其它货架130的空闲状况的信息、(vii)表示已被取出的集装箱120的搬运目的地的信息。
[0259]
作为作业类别,可例示出保存作业、取出作业、搬运作业等。货架130的位置信息可以包含表示搬运车140的停止位置的坐标的信息。集装箱120的位置信息可以包含表示由作为目标的货架130支承的1个以上的集装箱120中的作为目标的集装箱120在上下方向上的位置的信息。表示在上下方向上的位置的信息可以是表示作为目标的集装箱120配置于从下往上数第几个的信息。
[0260]
之后,行进控制部1030控制马达984,来使搬运车140移动至作为目标的货架130的下方的位置。另外,行进控制部1030控制马达984来对搬运车140的位置进行调整。
[0261]
接着,在s2424中,升降装置控制部1040判定由作为目标的货架130支承的1个以上的120中的位于最下部的120是否为作为目标的集装箱120。在上述的位于最下部的120不是作为目标的集装箱120的情况下(s2424为“否”的情况),在s2432中,行进控制部1030与升降装置控制部1040协作,来取出由作为目标的货架130支承的1个以上的120中的存在于作为目标的集装箱120的下方的1个以上的集装箱120。升降装置控制部1040既可以一次取出多个集装箱120,也可以一次取出1个集装箱120。
[0262]
接着,行进控制部1030控制马达984,来使搬运车140移动到其它货架130的下方。另外,行进控制部1030控制马达984来对搬运车140的位置进行调整。接着,行进控制部1030与升降装置控制部1040协作,将所取出的120保存到其它货架130。之后,重复s2422和s2424的处理。
[0263]
另一方面,在上述的位于最下部的120是作为目标的集装箱120的情况下(s2424为“是”的情况),在s2434中,行进控制部1030与升降装置控制部1040协作,来取出作为目标的集装箱120。升降装置控制部1040既可以一次取出多个集装箱120,也可以一次取出1个集装箱120。之后,行进控制部1030控制马达984,来将所取出的集装箱120搬运至指定的位置。由此,取出作业结束。
[0264]
[s2432的取出工序中的控制例]
[0265]
在本实施方式中,以使说明简单为目的,以没有搭载集装箱120的搬运车140一次取出1个集装箱120的情况为例,说明s2432中的集装箱120的取出过程的一例。然而,集装箱120的取出过程不限定于本实施方式。在另一实施方式中,搬运车140可以一次取出多个集装箱120。在又一实施方式中,也可以是,搭载了至少1个其它集装箱120的搬运车140取出作为目标的集装箱120。
[0266]
另外,以使说明简单为目的,在本实施方式中,以在即将实施取出工序的时间点作为目标的货架130支承集装箱p、集装箱q、集装箱r以及集装箱s的情况为例,说明s2432中的集装箱120的取出过程的一例。在本实施方式中,集装箱p、集装箱q、集装箱r以及集装箱s按此顺序堆叠成一列。
[0267]
在本实施方式中,集装箱p是由作为目标的货架130支承的多个集装箱120的位于最下部的集装箱120。另外,货架130从下方支承集装箱q,由此支承着多个集装箱120。集装箱r是作为目标的集装箱120。集装箱s是位于集装箱r的上方的集装箱120,是在集装箱r被取出之后仍保存于货架130的集装箱120。集装箱s可以是与集装箱r接触的集装箱120。集装箱s可以是集装箱r紧上方的一个集装箱120。
[0268]
此外,在本实施方式中,以集装箱p连结于集装箱q的下方的情况为例,说明集装箱120的取出工序的详情。然而,集装箱120的取出工序不限定于本实施方式。在另一实施方式中,货架130也可以通过从下方支承集装箱p来支承多个集装箱120。
[0269]
根据本实施方式,在s2422中,升降台902的位置被调整为作为目标的货架130或作为目标的集装箱120的下方的特定的位置。具体地说,凹部920的位置和方向被调整成与集装箱p相符。
[0270]
在本实施方式中,首先,升降装置控制部1040控制致动器944来使升降台902上升。升降装置控制部1040可以使升降台902上升,直到凹部920到达支承集装箱p的位置为止。此外,在搭载了至少1个其它集装箱120的搬运车140取出作为目标的集装箱120的情况下,升降装置控制部1040可以使升降台902上升,直到上述的其它集装箱120的位于最上部的集装箱120到达支承集装箱p的位置为止。
[0271]
接着,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,集装箱p、集装箱q、集装箱r以及集装箱s以大致垂直于地板10的轴为中心进行旋转。行进控制部1030可以以如下方式控制马达984:使集装箱120以外切圆600的中心602或7000的中心702为中心进行旋转。
[0272]
行进控制部1030以使堆叠成一列的多个集装箱120中的至少一个集装箱120(例如,集装箱r。)的基准面126与作为目标的货架130的基准面226不满足预先决定的条件的方式,对集装箱120的基准面126的法线方向的朝向进行调整。由此,集装箱120和货架130的状态从货架130限制集装箱120在上下方向上的移动的状态切换为货架130不限制集装箱120在上下方向上的移动的状态。
[0273]
接着,升降装置控制部1040控制致动器944来使升降台902下降。升降装置控制部1040可以使升降台902下降,直到集装箱s的切口部124的上表面(也就是说,区域546的下端。)与框架222的上表面之间的在上下方向上的距离变为0或预先决定的正的数值范围内为止。可以以如下方式设定预先决定的正的数值范围:在集装箱s的切口部124的上表面与框架222的上表面之间的在上下方向上的距离处于该预先决定的正的数值范围内的情况下,集装箱s的紧下方的一个集装箱的区域546的上端位于比框架222的下表面靠下方的位置。
[0274]
接着,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,集装箱p、集装箱q、集装箱r以及集装箱s以大致垂直于地板10的轴为中心进行旋转。行进控制部1030可以以如下方式控制马达984:使集装箱120以外切圆600的中心602或7000的中心702为中心进行旋转。
[0275]
行进控制部1030以使堆叠成一列的多个集装箱120中的至少一个集装箱120(例如,集装箱s。)的基准面126与作为目标的货架130的基准面226满足预先决定的条件的方式,对集装箱120的基准面126的法线方向的朝向进行调整。由此,集装箱120和货架130的状态从货架130不限制集装箱120在上下方向上的移动的状态切换为货架130限制集装箱120在上下方向上的移动的状态。
[0276]
由此,货架130能够从下方支承集装箱s来保存集装箱s。另一方面,位于比集装箱s靠下方的位置的集装箱p、集装箱q以及集装箱r已经不被货架130支承。
[0277]
接着,升降装置控制部1040控制致动器944,来使升降台902下降至行进位置。另外,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,搬运车140能够在2根框架支撑件224之间穿过从而从货架130的空间322的内部移动到货架130的外部。
[0278]
[s2434的取出工序中的控制例]
[0279]
在本实施方式中,以使说明简单为目的,以没有搭载集装箱120的搬运车140在货架130支承着单一的集装箱120的情况下取出被货架130支承着的集装箱120(有时称作集装箱t。)的情况为例,说明s2434中的集装箱120的取出过程的一例。然而,集装箱120的取出过程不限定于本实施方式。在另一实施方式中,可以是搭载了至少1个其它集装箱120的搬运车140取出作为目标的集装箱120。
[0280]
根据本实施方式,在s2422中,升降台902的位置被调整为作为目标的货架130或作为目标的集装箱120的下方的特定的位置。具体地说,凹部920的位置和方向被调整成与集装箱t相符。
[0281]
在本实施方式中,首先,升降装置控制部1040控制致动器944来使升降台902上升。升降装置控制部1040可以使升降台902上升,直到凹部920到达支承集装箱t的位置为止。此外,在搭载了至少1个其它集装箱120的搬运车140取出作为目标的集装箱120的情况下,升降装置控制部1040可以使升降台902上升,直到上述的其它集装箱120的位于最上部的集装
箱120到达支承集装箱t的位置为止。
[0282]
接着,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,集装箱t以大致垂直于地板10的轴为中心进行旋转。行进控制部1030可以以如下方式控制马达984:使集装箱120以外切圆600的中心602或7000的中心702为中心进行旋转。
[0283]
行进控制部1030以使集装箱t的基准面126与作为目标的货架130的基准面226不满足预先决定的条件的方式,对集装箱t的基准面126的法线方向的朝向进行调整。由此,集装箱t和货架130的状态从货架130限制集装箱t在上下方向上的移动的状态切换为货架130不限制集装箱t在上下方向上的移动的状态。
[0284]
接着,升降装置控制部1040控制致动器944来使升降台902下降。升降装置控制部1040可以使升降台902下降,直到集装箱t的区域546的上端位于比框架222的下表面靠下方的位置为止。例如,升降装置控制部1040使升降台902下降至行进位置。之后,行进控制部1030控制马达984来使搬运车140原地旋转或转弯。由此,搬运车140能够在2根框架支撑件224之间穿过从而从货架130的空间322的内部移动到货架130的外部。
[0285]
集装箱p可以是第一集装箱的一例。集装箱q可以是第一集装箱的一例。集装箱s可以是第三集装箱的一例。集装箱t可以是第一集装箱的一例。
[0286]
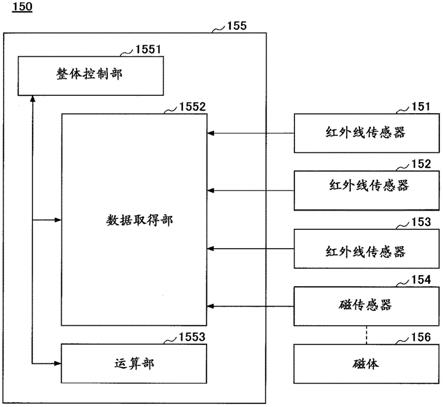
图25概要性地表示管理服务器160的内部结构的一例。在本实施方式中,管理服务器160具备通信控制部2522、库存管理部2524、设备管理部2526、请求受理部2528以及保存部2540。在本实施方式中,保存部2540具有物品信息保存部2542、集装箱信息保存部2544、货架信息保存部2546以及搬运车信息保存部2548。
[0287]
在本实施方式中,通信控制部2522对管理服务器160与集装箱120、货架130、搬运车140及拣选装置150中的至少一者之间的通信进行控制。通信控制部2522也可以对管理服务器160与用户的通信终端(未图示。)之间的通信进行控制。通信方式没有特别限定。
[0288]
在本实施方式中,库存管理部2524对自动仓库100的库存状况进行管理。由此,管理服务器160能够适当地保管物品。具体地说,库存管理部2524将用于识别多个物品中的各物品的信息与用于识别容纳了该物品的集装箱的信息相对应地进行管理。库存管理部2524将用于识别多个集装箱120中的各集装箱的信息、用于识别装载了该集装箱的货架130的信息、表示该集装箱配置在该货架的第几层的信息相对应地进行管理。
[0289]
在本实施方式中,设备管理部2526对集装箱120、货架130、搬运车140以及拣选装置150中的至少一者进行管理。设备管理部2526可以对集装箱120、货架130、搬运车140以及拣选装置150中的至少一者的状态进行管理。设备管理部2526可以对集装箱120、货架130、搬运车140以及拣选装置150中的至少一者的动作进行控制。
[0290]
例如,设备管理部2526对1个以上的搬运车140中的各搬运车分配搬运作业。更具体地说,设备管理部2526向搬运车140发送表示成为搬运作业的对象的集装箱120的位置以及搬运目的地的位置的信息。设备管理部2526也可以向搬运车140发送表示搬运车140的行进路径的信息。
[0291]
在本实施方式中,请求受理部2528从集装箱120、货架130、搬运车140、拣选装置150以及用户的通信终端中的至少一者接收各种请求。请求受理部2528可以对上述的请求进行处理。例如,请求受理部2528从各设备接收表示自己或其它设备的异常的信息以及请求应对该异常的信息。
[0292]
在本实施方式中,保存部2540保存在管理服务器160中的信息处理中利用的各种信息。物品信息保存部2542将用于识别多个物品中的各物品的信息与用于识别容纳了该物品的集装箱的信息相对应地进行保存。物品信息保存部2542也可以将用于识别多个物品中的各物品的信息与表示该物品的规格的信息相对应地进行保存。作为表示物品的规格的信息,例示出大小、形状、质量、原材料、保质期、保鲜期、有效期、价格等。物品信息保存部2542也可以将用于识别多个物品中的各物品的信息与同该物品的物流有关的信息相对应地进行保存。作为同物品的物流有关的信息,例示出该物品从进入自动仓库100起的经过时间、同类的物品的平均滞留时间等。
[0293]
在本实施方式中,集装箱信息保存部2544将用于识别多个集装箱120中的各集装箱的信息与用于识别装载了该集装箱的货架的信息相对应地进行保存。也可以是,集装箱信息保存部2544将用于识别多个集装箱120中的各集装箱的信息、用于识别装载了该集装箱的货架130的信息、表示该集装箱配置在该货架的第几层的信息相对应地进行保存。
[0294]
在本实施方式中,货架信息保存部2546将用于识别多个货架130中的各货架的信息、表示该货架的位置的信息、表示该货架的当前的状况的信息相对应地进行保存。作为货架130的当前的状况,例示出装载于该货架的集装箱120的个数、还能装载到该货架的集装箱120的个数、有无发生异常、各驱动部的驱动状况等。
[0295]
在本实施方式中,搬运车信息保存部2548将用于识别多个搬运车140中的各搬运车的信息与表示该搬运车的当前的状况的信息相对应地进行保存。作为搬运车140的当前的状况,例示出有无对该搬运车分配的搬运作业、该搬运作业的内容、该搬运车的当前位置、搭载于该搬运车的集装箱120的个数、还能搭载于该搬运车的集装箱120的个数、有无发生异常、各驱动部的驱动状况等。
[0296]
图26概要性地表示自动仓库2600的系统结构的另一例。在本实施方式中,自动仓库2600在以下方面与结合图1~图25来说明的自动仓库100不同:具备支承集装箱120的位置不同的多个货架130。关于上述的不同点以外的结构,图26的自动仓库2600可以具有与图1~图25的自动仓库100同样的特征。
[0297]
在本实施方式中,自动仓库2600的内部被划分为分区2610、分区2622、分区2624以及分区2626。拣选装置150被配置在分区2610。分区2622是最接近分区2610的分区,分区2626是最远离分区2610的分区。
[0298]
在本实施方式中,配置在分区2622的1个以上的货架130中的各货架支承集装箱120的位置ht被设定在比配置在分区2624的1个以上的货架130中的各货架支承集装箱120的位置hm高的位置。由此,与利用配置在分区2624的货架130的情况相比,通过利用配置在分区2622的货架130,能够一次性地搬入或搬出更多的集装箱120。
[0299]
在本实施方式中,配置在分区2624的1个以上的货架130中的各货架支承集装箱120的位置hm被设定在比配置在分区2626的1个以上的货架130中的各货架支承集装箱120的位置hs高的位置。由此,与利用配置在分区2626的货架130的情况相比,通过利用配置在分区2624的货架130,能够一次性地搬入或搬出更多的集装箱120。
[0300]
以上,使用实施方式对本发明进行了说明,但是本发明的保护范围不限定于上述实施方式所记载的范围。本领域技术人员明确可知,能够对上述实施方式施加各种变更或改进。另外,能够在技术上不矛盾的范围内将针对特定的实施方式说明的事项应用于其它
实施方式。另外,各结构要素也可以具有与名称相同而参照标记不同的其它结构要素同样的特征。根据权利要求书的记载明确可知,施加了这种变更或改进的方式也能够包含在本发明的保护范围内。
[0301]
应该留意的是,关于权利要求书、说明书以及附图中示出的装置、系统、程序以及方法中的动作、过程、步骤以及阶段等各处理的执行顺序,只要没有特别注明为“先于
…”
、“在
…
之前”等、并且不是将前面的处理的输出使用在后面的处理中的情况,就能够以任意的顺序实现。关于权利要求书、说明书以及附图中的动作流程,为了方便而使用“首先,”、“接着,”等来进行了说明,但是并不意味着必须以此顺序来实施。
[0302]
可以参照流程图和框图来记载本发明的各种实施方式,在此,框可以表示(1)执行操作的过程的阶段或(2)负责执行操作的装置的部分。特定的阶段和部分可以通过专用电路、与在计算机可读介质上保存的计算机可读命令一起提供的可编程电路、和/或与在计算机可读介质上保存的计算机可读命令一起提供的处理器来实现。专用电路可以包括数字和/或模拟硬件电路,可以包括集成电路(ic)和/或分立电路。可编程电路可以包括能够重构的硬件电路,该能够重构的硬件电路包括逻辑与、逻辑或、逻辑异或、逻辑与非、逻辑或非以及其它逻辑操作、触发器、寄存器、现场可编程门阵列(fpga)、可编程逻辑阵列(pla)等这样的存储元件等。
[0303]
计算机可读介质可以包括任意的能够保存由适当的设备执行的命令的有形设备,其结果,具有保存在该有形设备中的命令的计算机可读介质会具备包含命令的产品,能够执行该命令以创建用于执行流程图或框图所指定的操作的单元。作为计算机可读介质的例子,可以包括电子存储介质、磁存储介质、光存储介质、电磁存储介质、半导体存储介质等。作为计算机可读介质的更具体的例子,可以包括软盘(注册商标)、磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或快闪存储器)、电可擦除可编程只读存储器(eeprom)、静态随机存取存储器(sram)、光盘只读存储器(cd
‑
rom)、数字多用途光盘(dvd)、蓝光(rtm)光盘、记忆棒、集成电路卡等。
[0304]
计算机可读命令可以包括由一个或多个编程语言的任意的组合描述的源代码或目标代码中的任一者,所述编程语言包括汇编命令、命令集架构(isa)命令、机器命令、机器相关命令、微码、固件命令、状态设定数据、或smalltalk、java(注册商标)、c 等这样的面向对象的编程语言以及“c”编程语言或类似的编程语言这样的以往的过程型编程语言。
[0305]
可以在本地或借助局域网(lan)、因特网等这样的广域网(wan)对通用计算机、特殊目的的计算机、或其它能够编程的数据处理装置的处理器或可编程电路提供计算机可读命令,从而执行计算机可读命令以创建用于执行流程图或框图所指定的操作的单元。作为处理器的例子,包括计算机处理器、处理单元、微型处理器、数字信号处理器、控制器、微型控制器等。
[0306]
附图标记说明
[0307]
10:地板;20:壁;100:自动仓库;120:集装箱;124:切口部;126:基准面;130:货架;140:搬运车;150:拣选装置;160:管理服务器;222:框架;224:框架支撑件;226:基准面;232:钢丝;234:钢丝支撑件;242:搬运车;244:搬运车;322:空间;324:空间;422:底板;424:侧壁;430:罩;440:容纳空间;512:下端;514:上端;522:凸部;542:区域;544:区域;546:区域;552:面;600:外切圆;602:中心;700:外切圆;702:中心;902:升降台;904:升降装置;
906:车辆主体;920:凹部;942:受电弓;944:致动器;960:控制部;962:感测部;964:通信部;966:电源;980:车轮;982:驱动轮;984:马达;1020:通信控制部;1030:行进控制部;1040:升降装置控制部;1100:圆;1102:中心;2522:通信控制部;2524:库存管理部;2526:设备管理部;2528:请求受理部;2540:保存部;2542:物品信息保存部;2544:集装箱信息保存部;2546:货架信息保存部;2548:搬运车信息保存部;2600:自动仓库;2610:分区;2622:分区;2624:分区;2626:分区。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。