1.本发明总体上涉及燃料泵,更具体地涉及燃料泵操作控制方法。
背景技术:
2.燃料系统,特别是使用共轨蓄积器的燃料系统,通常被控制以将燃料喷射器可用的燃料保持在期望的压力范围内。为此,用于燃料泵的传统控制方法接收表示轨道压力的反馈,并使燃料泵的(一个或多个)泵送元件在每个泵送循环期间将一定范围的输送量的燃料(例如,从零到全容量输送)输送到蓄积器。此外,在每个泵送循环之后,少量的残余燃料保留在燃料泵的泵送腔室内。当燃料泵不断地将燃料输送到蓄积器并且处于接近恒定的操作状态时,燃料泵的泵送腔室内的这种残余燃料保持基本上恒定,并且主要由部件几何形状和操作压力来确定。这种残余燃料由于与每个潜在的泵送事件相关联地被重复地压缩和减压而导致低效率。
3.有时,燃料泵不需要在一个或多个随后的泵送循环中输送燃料。在这种情况下,当燃料泵的凸轮轴继续旋转时,残余燃料保持被截留在燃料泵内。由于这种旋转,残余燃料从燃料泵泄漏,从而导致与燃料的反复压缩和减压相关联的能量损失以及由于燃料泄漏而导致的来自泵送腔室的燃料损失。此外,过量残余燃料的压缩和减压也可能引起听得见的噪声。因此,希望提供用于燃料系统的控制方法,该控制方法解决传统方法的这些和其它缺点。
技术实现要素:
4.根据一个实施方式,本公开提供了一种控制具有至少一个泵送元件的泵的方法,所述方法包括:由控制器确定所述至少一个泵送元件中的泵送元件的一个或多个燃料输送事件的暂停;在确定所述一个或多个燃料输送事件的暂停之后,由所述控制器基于所述泵送元件的泵送腔室内的压力提供打开所述泵送元件的入口阀以移除泵送腔室内的残余流体的一部分的第一命令;以及在提供所述第一命令之后,由所述控制器基于所述泵送元件的上止点(tdc)位置来提供关闭所述泵送元件的所述入口阀的第二命令。
5.在一些示例中,所述方法还包括确定对应于所述泵送腔室内的压力的第一时间实例。提供第一命令是基于所述第一时间实例的。在一些情况下,该方法还包括基于以下各项中的至少一者确定响应时间:所述入口阀的打开响应时间、所述入口阀的行程、所述泵送元件的速度、发动机速度、凸轮轴的轮廓、高压系统的压力和所述泵送腔室内的残余流体量。确定所述第一时间实例是基于所述响应时间的。在一些变型中,所述方法还包括确定对应于在所述泵送腔室内的压力增加之前的时间段的预定打开时间。确定所述第一时间实例是基于所述预定打开时间的。
6.在一些情况下,所述方法还包括确定对应于所述泵送元件的所述tdc位置的第二时间实例。提供所述第二命令是基于所述第二时间实例的。在一些示例中,所述方法还包括基于以下各项中的至少一者确定响应时间:所述入口阀的关闭响应时间、所述入口阀的行
程、所述泵送元件的速度、发动机速度、凸轮轴的轮廓、高压系统的压力和所述泵送腔室内的残余流体量。确定所述第二时间实例是基于所述响应时间的。在一些变型中,所述方法还包括确定对应于所述泵送元件到达所述tdc位置之前的时间段的预定关闭时间。确定所述第二时间实例是基于所述预定关闭时间的。在一些情况下,所述方法还包括确定对应于所述泵送元件到达所述tdc位置之后的时间段的预定关闭时间。确定所述第二时间实例是基于所述预定关闭时间的。在一些示例中,确定一个或多个燃料输送事件的暂停是基于指示燃料蓄积器内的压力的压力测量结果的。
7.本公开的另一个实施方式提供了一种控制具有至少一个泵送元件的泵的方法,所述方法包括:由控制器确定所述至少一个泵送元件中的泵送元件的一个或多个燃料输送事件的暂停;以及在确定所述一个或多个燃料输送事件的暂停之后,由所述控制器提供控制所述泵送元件的入口阀的打开以移除所述泵送元件的泵送腔室内的残余流体的一部分的一个或多个命令,其中,所述一个或多个命令指示打开所述入口阀的时间实例和保持所述入口阀打开的持续时间。
8.在一些情况下,所述方法还包括基于所述泵送腔室内的压力的增加来确定所述时间实例。在一些示例中,所述方法还包括基于以下各项中的至少一者确定响应时间:所述入口阀的打开响应时间、所述入口阀的行程、所述泵送元件的速度、发动机速度、凸轮轴的轮廓、高压系统的压力和所述泵送腔室内的残余流体量。确定所述时间实例是基于所述响应时间的。在一些变型中,所述方法还包括确定对应于在所述泵送腔室内的压力增加之前的时间段的预定打开时间。确定所述时间实例是基于所述预定打开时间的。
9.在一些情况下,所述方法还包括确定保持所述入口阀打开的所述持续时间是基于所述泵送元件的上止点(tdc)位置的。在一些示例中,所述方法还包括基于以下各项中的至少一者确定响应时间:所述入口阀的关闭响应时间、所述入口阀的行程、所述泵送元件的速度、发动机速度、凸轮轴的轮廓、高压系统的压力和所述泵送腔室内的残余流体量。确定保持所述入口阀打开的所述持续时间是基于所述响应时间的。在一些变型中,所述方法还包括确定对应于所述泵送元件到达所述tdc位置之前的时间段的预定关闭时间。确定保持所述入口阀打开的所述持续时间是基于所述预定关闭时间的。在一些情况下,所述方法还包括确定对应于所述泵送元件到达所述tdc位置之后的时间段的预定关闭时间。确定保持所述入口阀打开的所述持续时间是基于所述预定关闭时间的。在一些示例中,确定一个或多个燃料输送事件的暂停是基于指示燃料蓄积器内的压力的压力测量结果的。
10.虽然公开了多个实施方式,但是根据以下示出和描述了本发明的说明性实施方式的详细描述,本发明的其它实施方式对于本领域技术人员将变得显而易见。因此,附图和详细描述应被认为是说明性的而非限制性的。
附图说明
11.通过参考结合附图对本公开的实施方式的以下描述,本公开的上述和其它特征以及获得它们的方式将变得更加明显,并且本公开本身将被更好地理解,其中:
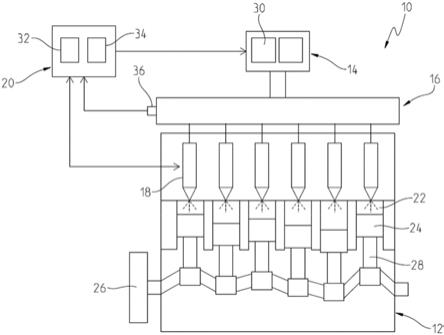
12.图1示出了燃料系统和发动机的概念图;
13.图2示出了图1的燃料系统的泵送元件的横截面侧视图;
14.图3示出了具有泵送元件的燃料系统的示例性方框图;
15.图4示出了具有泵送元件的燃料系统的另一示例性方框图;
16.图5示出了用于操作泵送元件的现有技术方法和该方法的结果以及泵送元件的结果;
17.图6示出了用于在随后的泵送循环期间当期望没有燃料输送时操作泵送元件的现有技术方法和该方法的结果;
18.图7示出了用于在随后的泵送循环期间当期望没有燃料输送时操作泵送元件的另一种现有技术方法和该方法的结果;
19.图8示出了用于在随后的泵送循环期间当期望没有燃料输送时操作泵送元件的示例性处理顺序;
20.图9至图13示出了用于在随后的泵送循环期间当期望没有燃料输送时操作泵送元件的新方法和该方法的结果;以及
21.图14示出了用于在随后的泵送循环期间当期望没有燃料输送时操作泵送元件的另一示例性处理顺序。
22.虽然本公开可具有各种修改和替代形式,但是具体实施方式已经在附图中以示例的方式示出并且在下面详细描述。然而,本公开不限制所描述的特定实施方式。相反,本公开旨在覆盖落入所附权利要求的范围内的所有修改、等同物和替代物。
具体实施方式
23.本领域的普通技术人员将认识到,所提供的实施方式可以在硬件、软件、固件和/或其组合中实现。例如,本文公开的控制器可以形成处理子系统的一部分,该处理子系统包括具有存储器、处理和通信硬件的一个或多个计算装置。控制器可以是单个装置或分布式装置,并且控制器的功能可以由硬件执行和/或作为非瞬态计算机可读存储介质上的计算机指令来执行。例如,控制器(例如,电子控制模块(“ecm”))中的计算机指令或编程代码可以以任何可行的编程语言来实现,诸如c、c 、html、xtml、java或任何其它可行的高级编程语言,或高级编程语言和较低级编程语言的组合。
24.如本文所用,与数量结合使用的修饰语“约”包括所述值,并且具有上下文所规定的含义(例如,其至少包括与特定数量的测量相关的误差度)。当在范围的上下文中使用时,修饰语“约”也应被认为公开了由两个端点的绝对值限定的范围。例如,“从约2至约4”的范围也公开了“从2至4”的范围。
25.现在参考图1,示出了燃料系统10和发动机12的部分。燃料系统10通常包括燃料泵14、共轨燃料蓄积器16、多个燃料喷射器18和控制器20。发动机12通常包括多个汽缸22,多个活塞24在由燃料燃烧提供的动力下在该汽缸中往复运动,从而经由对应的多个连杆28使曲轴26旋转。在该示例中被描述为具有两个泵送元件30(下面进一步描述)的燃料泵14从燃料源(例如图3所示的罐102)接收燃料,对燃料加压,并将加压燃料提供给蓄积器16。在控制器20的控制下联接到蓄积器16并从该蓄积器接收燃料的燃料喷射器18在发动机循环期间的特定时间(也在控制器20的控制下)将燃料输送到汽缸22,如本领域公知的。
26.图1所示的高度简化的控制器20包括处理器32和存储器34。当然,控制器20可以是基本上更复杂的,并且可以包括多个处理器和存储器装置以及多个其它电子部件。在该示例中,控制器20从联接到蓄积器16的压力传感器36接收压力测量结果。该压力测量结果指
示蓄积器16中的燃料的压力。控制器20响应于压力测量结果和/或下面将描述的其它测量结果来控制泵14的操作。更具体地,控制器20控制每个泵送元件30的输送的泵送输出。换句话说,控制器20控制一个或多个阀(例如图2至图4所示的入口阀44),所述阀将燃料从燃料源或罐102提供到泵送元件30。
27.图2更详细地描绘了图1的泵送元件30的一个示例。如图所示,泵送元件30通常包括壳体38、挺杆40和辊子42。由螺线管46控制的入口阀44被设置在壳体38的上端处。出口阀48也被设置在壳体38内。壳体38包括限定泵送腔室52的圆筒50。联接到挺杆40的柱塞54在泵送腔室52中往复运动,在向上的泵送行程期间压缩泵送腔室52中的任何燃料,以便输送到出口阀48,并从那里输送到蓄积器16。在向下填充行程期间,燃料通过入口阀44被输送到泵送腔室52。
28.柱塞54的往复运动由凸轮轴56(在一些示例中,该凸轮轴联接到图1的曲轴26)的旋转运动和复位弹簧58的向下偏压力提供动力。当凸轮轴56旋转时,安装到凸轮轴56的偏心凸角60也旋转。辊子42由于弹簧58的偏压力而保持与凸角60接触。因此,在凸轮轴56旋转半圈期间,凸角60向上推动辊子42(以及挺杆40和柱塞54),而在另一半期间,弹簧58向下推动辊子42(以及挺杆40和柱塞54)与凸角60接触。入口阀44和出口阀48的操作由控制器20控制,以使泵送元件30根据本领域已知的各种控制方法将一定量的燃料输送到蓄积器16。
29.图3和图4示出了具有一个或多个泵送元件30的燃料系统10的示例性方框图。例如,图3示出了具有单个泵送元件30的燃料系统10的简化版本。图4示出了具有两个泵送元件30a和30b的燃料系统10的简化版本。当然,包括附加泵送元件30的附加元件、传感器、部件、子系统和/或其它实体也可由燃料系统10使用和/或包括在该燃料系统中,并由下面描述的方法使用。
30.如图3和图4所示,低压泵104将流体(例如,燃料)从燃料源(例如,罐)102输送或泵送到入口阀44。控制器20控制(例如,致动、打开、关闭和/或以其它方式操作)入口阀44以允许将燃料输送到泵送腔室52(图2中所示)。上述柱塞54的向上和向下移动使得流体流动穿过出口阀48流到高压系统106(例如,图1所示的蓄积器16和/或燃料喷射器18)。泵送腔室出口止回阀48通常位于高压泵送腔室52的排出侧。
31.下面将参考上面的图1至图4描述下面的图5至图13中所述的燃料泵14的控制方法,包括用于在泵送循环之后从燃料泵14的泵送腔室52移除残余流体的示例性新方法。例如,图5示出了用于控制一定量的燃料从一个泵送元件30到高压系统106的输送的常用和现有技术的控制方法。例如,对于燃料泵14的每个泵送循环,控制器20控制位于低压供应管线(例如低压泵104和罐102)和泵送腔室52之间的控制阀(例如入口阀44)。在一些情况下,入口控制阀44是常开阀(例如,总是打开,但是响应于从控制器20接收指令,入口阀44关闭)。在其它情况下,入口控制阀44是常闭阀(例如,总是关闭,但是响应于从控制器20接收指令,入口阀44打开)。
32.参照图5的顶部部分,典型的泵输送事件开始于打开入口控制阀44以使来自低压供应管线的流体能够进入泵送腔室52。例如,控制器20提供一个或多个指令以打开入口阀44。响应于这些指令,在时间202,入口阀44被构造成打开。例如,入口阀44的位置210被构造成从关闭位置210a转换到打开位置210b。在稍后的时间206,入口阀44被构造成关闭(例如,从打开位置210b转换回到关闭位置210a)。在一些示例中,入口阀44包括弹簧(例如,弹簧
58)和/或另一致动器,所述弹簧和/或另一致动器被构造成基于从控制器20接收的命令打开入口阀44并且基于接收的命令进一步关闭入口阀44。
33.参考图5的底部部分,凸轮轴56使凸角60旋转,该凸角继而使柱塞54轴向平移。基于凸轮轴56/凸角60的旋转,柱塞54的位置222从下止点(bdc)位置222b轴向移位到上止点(tdc)位置222a。返回参照图4,泵送元件30a示出了使柱塞54轴向移位到tdc位置222a的凸轮轴56。泵送元件30b示出了使柱塞54轴向移位到bdc位置222b的凸轮轴56。
34.回到图5,当凸轮轴56使柱塞54从bdc 222b旋转到(例如,在tdc前面)tdc 222a的左侧时,并且由于入口阀44在这种情况下是打开的直到其在时间208处完全关闭,所以泵送腔室52中的燃料通过打开的入口阀44溢出回到入口供应回路102和/或104中直到时间208。在入口阀44在时间208关闭之后并且当柱塞朝向tdc222a移动时,压力224增加(例如在时间208之后)。换句话说,在208之后,与燃料压缩相关的泵送腔室52压力升高开始。当泵送腔室压力224升高到阈值水平(例如,在该阈值水平,作用在出口止回阀48上的净力导致出口阀48打开)时,泵送元件30开始将流体输送到下游回路(例如,高压系统106)。泵输送持续到接近当出口阀48关闭时的tdc 222a。当凸轮轴56在tdc 222a之后旋转时,泵送腔室52容积增加,并且泵送腔室中的压力224从其输送压力水平降低。
35.在整个泵送循环期间,泵送腔室52内的流体水平连续地改变。线212表示零流体线,线212下方的阴影部分(214
‑
220)表示泵送腔室52中的流体水平。例如,当柱塞54处于bdc 222b时,流体水平处于其最大值。从tdc 222a移动到bdc 222b表示体积的增加,其可以是流体或者可以不是流体。
36.柱塞54在tdc 222a和bdc 222b之间的移动导致流体填充216、溢出217、压缩218,并最终输送220到高压系统106。阴影部分214
‑
220表示在泵送循环期间的不同阶段泵送腔室52内的流体的量(例如,体积和/或质量)。例如,部分216示出了通过打开入口阀44以及柱塞54从tdc 222a移动到bdc 222b而导致的填充泵送腔室52的流体的量。部分217示出了通过入口阀44保持打开并且柱塞54从bdc 222b移动到tdc 222a而导致的从泵送腔室52返回穿过低压管线溢出的流体的量。
37.部分218示出了在流体压缩和减压时流体的体积。在图5中的左tdc 222a位置开始,随着凸轮轴56从tdc 222a缩回,在tdc 222a处容纳在截留体积214中的加压流体随着其减压而膨胀。由218表示的流体体积增加,直到时间202,此后泵送腔室被减压。减压体积的水平由222b左侧的218区段表示。压缩在时间206开始,此时入口阀44完全关闭。在该时间206的流体水平被示出为227。换句话说,在时间206之后,222b右侧的218中所示的流体体积被压缩。泵送腔室52中的压力达到在时间208打开出口止回阀的水平,并且在时间208,流体水平被示出为228。在时间208之后,泵开始输送由220表示的体积。部分220表示通过入口阀44的关闭和/或泵送腔室52中的压力224升高而导致的被输送到高压系统106的流体的量。部分214表示截留在泵送腔室52内的流体的量或体积(例如,在泵送事件/循环之后在泵送腔室52内产生的流体体积)。
38.换句话说,残余流体体积214包括截留/间隙体积(例如,图6中所示的214a)和过量流体体积(例如,图6中所示的214b)。如下面将更详细地解释的,截留/间隙体积214a是泵送腔室52和柱塞54的容积之间的差。在图5中的左侧tdc 222a处,流体体积是214。在该点214处的流体体积包含处于加压和压缩状态的大量流体。当泵送腔室的几何体积膨胀时,流体
体积以与流体被减压相同的速率膨胀。在流体体积已经减压之后,流体的膨胀体积在图6中示出为体积214b。在图5中,该相同的膨胀体积在bdc 222b的左侧示出为218。当每个泵送事件之后跟随有随后的泵送事件(例如,泵送元件30连续地将流体泵送到高压系统106)时,流体214的这种残余量或体积导致低效率。
39.然而,当在下一个泵送循环期间不需要泵输出输送事件时,该过量的残余流体214导致燃料系统10内的一个或多个低效率。例如,在图5所示的泵输出输送事件之后,燃料系统10的操作状态可以使得对于任何和/或所有的泵送元件30,从随后的下一个潜在的泵送事件不期望泵输出输送。换句话说,如上文简要提到的,控制器20可以确定泵送元件30/燃料泵14的燃料输送事件的暂停(例如,控制器20可以基于一个或多个传感器,例如压力传感器36,导致泵送元件30不将液体输送到高压系统106)。
40.图6和图7描绘了用于在不期望泵输出输送时管理残余流体214的传统的现有技术方法。例如,图6示出了当入口阀44保持在关闭位置210a以便防止附加的流体(例如,来自图5的填充阶段216和溢出阶段217的流体)进入泵送腔室52时的泵送元件30的用于随后的潜在泵事件(例如,循环)的操作。换句话说,在随后的循环开始时(例如,在tdc 222a处),由于流体处于压缩和加压状态,泵送腔室52中的流体的质量被容纳在容积214a中。当处于减压状态时(例如,在tdc 222a之后),泵送腔室52中的流体的质量由214a和214b的容积之和表示。当柱塞54向tdc 222a行进以及从tdc 222a行进时,全部流体214的体积被重复地压缩和减压。
41.每次压缩残余流体214的一部分时,一些残余流体214泄漏经过环形泵柱塞54和圆筒50间隙。对于被设计成使该泄漏率最小化的高效泵送元件30,由214b表示的残余流体体积随着其逐渐从泵送柱塞54和圆筒50之间的环形间隙泄漏而从泵送腔室52缓慢地泄漏可能需要许多循环,随后泵送腔室52重复加压。对于泵送腔室中的残余流体214未被压缩的时间段,从供应系统(例如罐102)经过入口止回阀44到泵送腔室52的任何泄漏量用于延长残余流体214的该压缩和减压循环的持续时间。每当泵送腔室中的加压残余流体214从环形间隙泄漏时,能量就损失。对于每个循环,当泵送腔室压力224增加时,泵送元件30需要驱动扭矩。对于每个循环,当泵送腔室压力224降低时,泵送元件30用于驱动连接到高压系统106的燃料系统10。这些扭矩反转可具有包括听得见的噪声发出的负面效应。对于每个循环,即使没有泵送输出输送发生,柱塞54也随着泵送腔室中的残余流体214被重复地加压和减压(例如,由于柱塞54操作地联接到曲轴26)而轴向行进。
42.然而,使用图6的控制方法可能导致许多低效率和缺点。例如,由于泵驱动扭矩反转可能导致听得见的噪声,泵驱动扭矩反转是由于每次柱塞54循环穿过tdc 222a时泵送腔室52中过量的截留流体214b的压缩和减压而产生的。此外,该方法可能导致燃料泵14的耐用性降低,因为即使对于没有流体从泵14被输送的事件也发生泵送腔室52的高压循环。另外,对于利用与输送流体(例如,燃料)不同的润滑流体(例如,油)操作的泵14,即使对于不输送潜在泵送事件(其中泵送柱塞54不被强制缩回以跟随凸轮轴56的运动),油到燃料和燃料到油的传递也作为泵送柱塞54的轴向位移的结果而发生。而且,由于与穿过环形间隙的高压泄漏相关的损失和由于在柱塞轴向行进时柱塞和圆筒之间的摩擦载荷导致的损失而产生效率降低。此外,即使在从控制器20接收到指令以终止单个泵送元件30或泵送元件30的任何组合的泵输出输送之后,该方法也可能导致对高压系统106的不期望的泵送的增加
的可能性。
43.图7示出了当不期望泵输出输送时用于管理残余流体214的另一种传统的现有技术方法。例如,如果操作条件使得对于一个或多个随后的潜在泵送事件(例如,泵送循环)不期望泵输送,则当泵送腔室中的残余压力224下降时,控制器20可打开用于泵送柱塞54的入口控制阀44(例如,从关闭位置210a到打开位置210b)。这使得阀44能够打开,然后保持入口阀44打开,直到泵送元件30期望下一个期望的泵送事件。对于该现有技术方法,来自低压供应管线的流体用于在其体积随着柱塞54移动到bdc 222b而增加时而填充泵送腔室52(类似于图5,并且由填充阶段216和初始阶段214b示出)。在bdc 222b之后,流体的体积从泵送腔室溢出回到入口供应回路102和/或104(例如,类似于图5并且由溢出阶段217示出)。重复该填充阶段216和溢出阶段217,直到来自该泵送元件30的下一个期望的泵送事件。换句话说,图7示出了在泵送腔室减压224之后当入口阀44被打开并被命令保持打开(例如,通过控制器20)时,用于这些随后潜在的泵事件的泵送元件30的操作。然后,当凸轮轴56引导柱塞54向tdc 222a行进以及从tdc 222a行进时,泵送腔室被重复地填充和溢出。
44.然而,使用图7的控制方法也会导致许多低效率和缺点。例如,对于利用与输送流体(例如,燃料)不同的润滑流体(例如,油)操作的泵14,由于泵送柱塞54的轴向位移,甚至对于泵送柱塞54不被强制缩回以跟随凸轮轴56的运动的非输送潜在泵送事件,也会发生油到燃料和燃料到油的传递。此外,流体的重复填充和溢出导致入口低压供应系统102和104中的压力变化。这可能负面地影响低压系统102、104的坚固性和耐久性,并且还可能负面地与燃料系统10中的任何其它泵送元件(例如,30b)的填充和溢出操作互相影响。而且,该控制方法可能导致在单个泵送元件或泵送元件的任何组合的命令下暂时终止泵输出输送的可能性增加。
45.图8描述了一种新的方法300,以解决图6和图7的上述现有技术缺陷。换句话说,控制器20可以被构造成在确定期望没有泵输出输送之后实现方法300以管理残余流体214。在步骤302,控制器20确定暂停一个或多个泵送元件30的一个或多个燃料输送事件。在一些示例中,控制器20从一个或多个传感器接收测量结果。例如,压力传感器36测量高压系统106例如蓄积器16内的压力。压力传感器36将压力测量结果提供给控制器20。基于这些接收到的测量结果,控制器20确定暂停至少一个泵送元件30的燃料输送事件。
46.在步骤304并且在确定燃料输送事件的暂停之后,控制器20基于泵送元件30的泵送腔室52内的压力提供打开泵送元件30的入口阀44以移除泵送腔室52内的过量残余流体214b的第一命令。换句话说,在检测、估计、计算和/或以其它方式确定泵送腔室52即将、正在和/或已经开始增加泵送腔室52内的压力之后,控制器20提供打开入口阀44的第一命令。在一些示例中,泵送腔室52内的压力将增加的时间被存储在诸如存储器34的存储器中。控制器20基于检索存储在存储器34中的该时间来提供第一命令。在其它示例中,控制器20基于一个或多个测量结果确定泵送腔室52内的压力增加。例如,基于压力测量结果(例如,来自压力传感器36和/或来自泵送元件30内的压力传感器),控制器20确定泵送腔室52内的压力增加。另外和/或替代地,控制器20基于一个或多个接收的测量结果和/或存储的信息来计算和/或估计泵送腔室52内将存在压力增加。
47.在步骤306,在提供第一命令之后,控制器20基于泵送元件30(例如柱塞54)的tdc位置222a提供关闭燃料泵的入口阀44的第二命令。在一些示例中,柱塞54处于tdc 222a的
时间被存储在存储器中,例如存储器34。控制器20基于检索存储在存储器34中的该时间来提供第二命令。在其它示例中,控制器20可以接收指示柱塞54的位置的信息。例如,控制器20可以与指示曲轴26的位置的传感器通信。基于曲轴26的位置,控制器20可以计算、估计和/或以其它方式确定柱塞54的位置。控制器20可以在柱塞54的位置处于tdc位置222a之前提供第二命令。换句话说,控制器20可在柱塞54到达bdc位置222b之后并且在柱塞54的位置到达tdc位置222a之前提供第二命令。在一些变型中,控制器20基本在tdc位置222a和/或紧接在tdc位置222a之后提供第二命令。图9至图13将更详细地描述方法300的步骤。
48.图9示出了当期望没有泵输出输送时使用新方法300处理残余流体214的示例。例如,基于来自步骤302的确定(例如,在泵送排放事件之后的事件中不期望泵送排放量),在定时226时打开入口控制阀44,该定时基本上是在当泵送腔室中的残余流体体积214即将被前进的凸轮轴56压缩时的时间。换句话说,基于控制器20确定与泵送腔室52内的压力224的增加相关联的定时226,控制器20向入口阀44提供第一命令。该第一命令被构造成使入口阀44打开。由于由第一命令引起的入口阀44的打开,泵送腔室52中的过量流体214b被排出(例如,由217示出的流体体积)到入口供应回路(例如,低压泵104和/或罐102),而不是被压缩。
49.然后,在接近柱塞54处于靠近tdc 222a的位置的时间228时,关闭入口控制阀44。换句话说,基于凸轮轴56将柱塞54轴向移位到基本上在tdc 222a处的位置,控制器20提供关闭入口阀44的第二命令。泵送腔室52中剩余的未压缩的流体体积214大致等于泵送腔室的截留/间隙体积214a,因为任何过量流体214b刚刚从泵送腔室52被排出。对于随后的潜在泵送事件,只要与泵送腔室相关联的阀(例如入口阀44和/或出口阀48)保持关闭并且没有显著的泄漏率,则存在基本上为零的泵送腔室压力224升高,这导致随后的潜在泵送事件。
50.图10示出了当期望没有泵输出输送时使用新方法300来管理残余流体214的另一示例。图10中描述的方法与图9的方法类似;然而,它还包括从控制器20到入口阀44的入口阀44打开230和关闭命令232。在一些示例中,第一命令230和第二命令232是两个单独的命令。第一命令230被构造成打开入口阀44,第二命令232被构造成关闭入口阀44。在其它示例中,控制器20向入口阀44提供连续命令(例如,在入口阀44是常开或常闭的示例中)。第一命令230和第二命令232或者开始向入口阀44提供信号,或者停止向入口阀44提供信号。例如,对于常闭的入口阀44,并且在步骤304,控制器20提供第一命令230或信号以打开入口阀44。在步骤306,控制器20提供第二命令232或者停止提供关闭入口阀44的信号。第一命令230和第二命令232对于常开的入口阀44被切换。换句话说,并且如下面更详细地描述的,连续命令基于打开入口阀44的时间实例(例如,第一命令230)和保持入口阀44打开的持续时间(例如,第二命令232)。
51.来自控制器20的阀打开命令(例如,第一命令230)的定时可以基于燃料系统10对诸如入口阀44的打开响应时间、入口阀行程、泵送元件30和/或发动机速度、凸轮轴56轮廓、高压系统106的压力和泵的截留体积214之类的因素的响应和灵敏度。换句话说,控制器20基于指示泵送腔室52内压力增加的时间226和/或基于上述因素中的至少一者来确定提供第一命令的响应时间。例如,对于具有较大打开响应时间的入口阀44,控制器20可在基本上在指示压力增加的时间226之前的时间提供第一命令230。对于具有较低打开响应时间的入口阀44,控制器20可在更接近或更靠近时间226的时间提供第一命令230。
52.来自控制器20的阀关闭命令(例如,第二命令232)的定时可以包括系统对诸如入
口阀44的关闭响应时间、入口阀44行程、泵送元件30和发动机速度、凸轮轮廓、高压系统106的压力和泵的截留体积214之类的因素的响应和灵敏度。换句话说,控制器20基于指示柱塞54的tdc 222a位置的时间228和/或基于上述因素中的至少一者来确定提供第二命令的响应时间。
53.控制器20可使用不变控制结构(例如通过查找表、公式或类似方法)中的值,来确定打开命令230和/或关闭命令232定时。此外,控制器20可基于反馈命令确定打开命令230和/或关闭命令定时,反馈命令例如但不限于在截留体积溢出事件中的高压系统106中的压力改变(例如,由压力传感器36测量)。
54.图11示出了当期望没有泵输出输送时使用新方法300来管理残余流体214的又一示例。例如,控制器20被构造成在泵送腔室52中的压力增加之前的预定打开时间提供打开入口阀44的第一命令(例如,第一命令相对于图9中所示的定时稍微提前)。预定打开时间可以被存储在存储器34中,并且可以是燃料系统10专用和/或泵送元件30专用的。如图所示,在泵送腔室中的残余流体体积214b即将被前进的凸轮轴56压缩的时间稍微之前的定时226,打开入口控制阀44。由于入口阀44被打开得稍早,来自低压系统102和/或104的相对少量的流体216进入泵送腔室52。在填充了减小尺寸的泵送腔室容积216之后,以与上述类似的方式开始溢出阶段217。由于入口控制阀44打开,泵送腔室52中的过量流体214b被排出到入口供应回路102和/或104而不是被压缩。然后,在接近当泵凸轮处于tdc 222a时的时间228时,关闭210b入口控制阀44。泵送腔室中剩余的残余流体体积214近似等于泵送腔室52的截留/间隙体积214a,因为任何过量流体214b刚刚从泵送腔室52被排出。对于随后的潜在泵送事件,只要与泵送腔室52相关联的阀44和/或48保持关闭并且不具有显著的泄漏率,就没有泵送腔室压力224升高,这种升高会导致随后的潜在泵送事件。
55.在一些示例中,组合图10和图11的方法。例如,控制器20基于指示泵送腔室52内压力增加的时间和/或基于上述因素(例如,入口阀44的打开响应时间、入口阀行程、泵送元件30和/或发动机速度、凸轮轴56轮廓、高压系统106的压力和泵的截留体积214)中的至少一者来确定响应时间。控制器20基于与上述因素相关联的响应时间和预定打开时间(例如,响应时间和预定打开时间被加在一起并且用作相对于指示压力增加的时间而偏移的时间)提供第一命令。
56.图12示出了当期望没有泵输出输送时使用新方法300来管理残余流体214的又一示例。例如,控制器20被构造成在柱塞54到达tdc位置222a之前的预定关闭时间提供关闭入口阀44的第二命令。(例如,控制器20相对于图9所示的最佳定时稍微提前提供第二命令)。预定关闭时间可以被存储在存储器34中,并且可以是燃料系统10专用的和/或泵送元件30专用的。如图所示,在泵tdc 222a稍微之前的定时228关闭入口控制阀44。由于入口阀44比最佳稍早关闭,所以不是泵送腔室中的所有过量燃料214b都被排出。然而,这种少量的燃料明显少于上述现有技术方法。
57.在一些示例中,组合图10、图11和/或图12的方法。例如,控制器20基于指示泵送腔室52内压力增加的时间和/或基于上述因素(例如,入口阀44的关闭响应时间、入口阀44行程、泵送元件30和发动机速度、凸轮轴56轮廓、高压系统106的压力和泵的截留体积214)中的至少一者来确定响应时间。控制器20基于与上述因素相关联的响应时间和预定关闭时间(例如,响应时间和预定关闭时间被加在一起并且用作相对于指示柱塞54处于tdc 222a的
时间而偏移的时间)提供第二命令。
58.图13示出了当期望没有泵输出输送时使用新方法300来管理残余流体214的又一示例。例如,控制器20被构造成在柱塞54到达tdc位置222a之后的预定关闭时间提供关闭入口阀44的第二命令。(例如,控制器20相对于图9所示的最佳定时稍微延迟提供第二命令)。预定关闭时间可以被存储在存储器34中,并且可以是燃料系统10专用的和/或泵送元件30专用的。如图所示,在泵tdc 222a稍微之后的定时228关闭入口控制阀44。在泵tdc 222a与入口阀44的完全关闭定时之间的这个时间差期间,少量燃料216起作用以部分地填充泵送腔室52。这种少量燃料显著少于上述现有技术的方法。
59.在一些示例中,组合图10、图11和/或图13的方法。例如,控制器20基于指示泵送腔室52内压力增加的时间和/或基于上述因素(例如,入口阀44的关闭响应时间、入口阀44行程、泵送元件30和发动机速度、凸轮轮廓、高压系统106的压力和泵的截留体积214)中的至少一者来确定响应时间。控制器20基于与上述因素相关联的响应时间和预定关闭时间(例如,响应时间和预定关闭时间被加在一起并且用作相对于指示柱塞54处于tdc 222a的时间而偏移的时间)提供第二命令。
60.燃料泵14的尺寸必须被设计成使得它们能够在相关的系统操作条件下输送最大量。然而,对于大多数应用,对于大部分操作时间,所需的泵输送远小于该最大量。例如,对于其中存在多个泵送元件(例如,图4中所示的30a和30b)的燃料系统10,对于许多应用,单独的泵送元件中的一个或多个的输出输送可暂时中断,并且泵14可将所需的输出量输送到其余的泵送元件上。
61.图14示出了另一种新的方法400,以解决图6和图7的上述现有技术缺陷。换句话说,控制器20可以被构造成在确定期望没有泵输出输送之后实现方法400以管理残余流体214和过量的残余流体214b。类似于步骤302,在步骤402,控制器20确定暂停一个或多个泵送元件30的一个或多个燃料输送事件。
62.在步骤404,在确定燃料输送事件的暂停之后,控制器20提供控制泵送元件30的入口阀44打开以移除泵送元件30的泵送腔室52内的残余流体214的一部分的一个或多个命令。所述一个或多个命令指示打开入口阀44的时间实例和保持入口阀44打开的持续时间。例如,代替提供打开入口阀44的第一命令和关闭入口阀44的第二命令,控制器20可以提供指示打开入口阀44的时间实例和保持入口阀44打开的持续时间的一个或多个命令。
63.控制器20可以确定打开入口阀44的时间实例,类似于图8的步骤304和图9至图13中描述的附加示例。换句话说,控制器20可以基于泵送腔室52内的压力确定打开入口阀44的时间实例。另外和/或替代地,控制器20可以基于入口阀44的打开响应时间、入口阀行程、泵送元件30和/或发动机速度、凸轮轴56轮廓、高压系统106的压力、泵的截留体积214和/或预定打开时间确定打开入口阀44的时间实例。
64.控制器20可以确定保持入口阀44打开的持续时间,类似于图8的步骤306和图9至图13中描述的附加示例。换句话说,控制器20可以基于泵送元件30的tdc位置222a来确定保持入口阀44打开的持续时间。另外和/或替代地,控制器20可以基于入口阀44的关闭响应时间、入口阀行程、泵送元件30和/或发动机速度、凸轮轴56轮廓、高压系统106的压力、泵的截留体积214和/或预定关闭时间来确定保持入口阀44打开的持续时间。
65.使用上述新方法300和/或上述系统10的优点包括:通过减少与穿过环形间隙的高
压泄漏相关联的损失、由于在柱塞54轴向行进时柱塞54和圆筒50之间的摩擦负载引起的损失、以及由于穿过入口阀44流入和流出泵送腔室52引起的损失,来增加效率;由于消除了泵驱动扭矩反转而减少了听得见的噪声,该泵驱动扭矩反转是由于每当凸轮轴56使柱塞54循环穿过tdc 222a时在泵送腔室52中的过量截留流体214的压缩和减压而产生的;随着泵送腔室52的高压循环的数量在泵14的寿命期间减少,泵14的耐久性增加;由于压力循环频率和幅度的减小以及用于泵构造的泵送柱塞54行程的减小,对于非输送潜在泵送事件,泵的油到燃料和燃料到油的传递率的减小,在所述泵构造中泵送柱塞54不被强制缩回以跟随凸轮轴56的运动;相对于上述现有技术方法,入口低压供应系统(例如102和/或104)中的压力变化减小;并且在单个泵送元件或泵送元件30a和/或30b的任何组合的命令下暂时终止泵示出输送的可能性降低。
66.应当理解,本文包含的各个附图中所示的连接线旨在表示各个元件之间的示例性功能关系和/或物理联接。应当注意,在实际系统中可以存在许多替代或附加的功能关系或物理连接。然而,益处、优点、问题的解决方案以及可以引起任何益处、优点或解决方案发生或变得更加显著的任何元素不应被解释为关键的、必需的或基本的特征或元素。因此,本发明的范围不受所附权利要求的限制,其中除非明确说明,否则以单数形式提及元件并不意味着“一个且仅一个”,而是“一个或多个”。此外,在权利要求中使用与“a、b或c中的至少一者”类似的短语的情况下,该短语旨在被解释为意味着在实施方式中可以只存在a,在实施方式中可以只存在b,在实施方式中可以只存在c,或者在单个实施方式中可以存在元件a、b或c的任意组合;例如a和b、a和c、b和c、或a和b和c。
67.在本文的详细描述中,对“实施方式”、“示例实施方式”等的引用指示所描述的实施方式可包括特定特征、结构或特性,但每个实施方式可不一定包括该特定特征、结构或特性。此外,这些短语不一定是指相同的实施方式。此外,当结合实施方式描述特定特征、结构或特性时,认为结合其它实施方式来影响这种特征、结构或特性是在受益于本公开的本领域技术人员的知识范围内,而不管是否明确描述。在阅读了本说明书之后,相关领域的技术人员将清楚如何在替代实施方式中实现本公开。
68.此外,本公开中没有元件、部件或方法步骤旨在专用于公众的,无论该元件、部件或方法步骤是否在权利要求中明确叙述。除非使用短语“指的是”明确地叙述了本文的权利要求要素,否则不应在35u.s.c.112(f)的条款下解释该要素。如本文所使用的,术语“包括”或其任何其它变形,旨在覆盖非排他性的包含,使得包括一系列元件的过程、方法、物品或设备不仅包括这些元件,而且可以包括没有明确列出的或这些过程、方法、物品或设备固有的其它元件。
69.在不脱离本公开的范围的情况下,可以对所讨论的示例性实施方式进行各种修改和添加。例如,虽然上述实施方式涉及特定特征,但是本公开的范围还包括具有特征的不同组合的实施方式和不包括所有所述特征的实施方式。因此,本公开的范围旨在涵盖落入权利要求及其所有等同物的范围内的所有这样的替代、修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。