1.本发明涉及一种作业现场的管理系统以及作业现场的管理方法。
背景技术:
2.在如矿山那样的广阔的作业现场,存在无人驾驶车辆工作的情况。
3.专利文献1:国际公开第2016/051524号
技术实现要素:
4.在作业现场,存在无人驾驶车辆和有人驾驶车辆同时存在并工作的情况。在无人驾驶车辆及有人驾驶车辆均是运载车辆时,运载车辆在如装载场及卸载场那样的作业场实施装载作业及卸载作业。为了抑制作业效率的下降,需要以不使无人驾驶车辆及有人驾驶车辆的运转率下降的方式使无人驾驶车辆及有人驾驶车辆运行。
5.根据本发明的方式,提供一种作业现场的管理系统,其是无人驾驶车辆和有人驾驶车辆同时存在并工作的作业现场的管理系统,所述作业现场的管理系统的特征在于,包括:判断部,其判断在作业现场的规定区域内是否有所述有人驾驶车辆;以及指令部,其基于判断结果,输出使所述无人驾驶车辆或所述有人驾驶车辆向设定于作业场的作业点行走的作业指令。
6.根据本发明的方式,能够抑制作业效率的下降。
附图说明
7.图1是示意性地表示本实施方式涉及的管理系统、无人驾驶车辆、以及有人驾驶车辆的一个示例的图。
8.图2是示意性地表示本实施方式涉及的作业现场的一个示例的图。
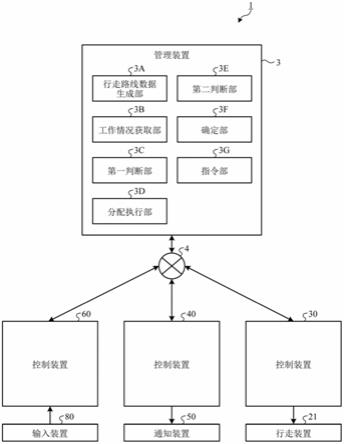
9.图3是表示本实施方式涉及的管理系统的一个示例的功能框图。
10.图4是示意性地表示本实施方式涉及的装载场的一个示例的图。
11.图5是示意性地表示本实施方式涉及的通知装置的一个示例的图。
12.图6是示意性地表示本实施方式涉及的通知装置的一个示例的图。
13.图7是表示本实施方式涉及的管理方法的一个示例的示意图。
14.图8是表示本实施方式涉及的管理方法的一个示例的示意图。
15.图9是表示本实施方式涉及的管理方法的一个示例的示意图。
16.图10是表示本实施方式涉及的管理方法的一个示例的示意图。
17.图11是表示本实施方式涉及的管理方法的一个示例的示意图。
18.图12是表示本实施方式涉及的管理方法的一个示例的示意图。
19.图13是表示本实施方式涉及的管理方法的一个示例的示意图。
20.图14是表示本实施方式涉及的管理方法的一个示例的流程图。
21.图15是表示本实施方式涉及的管理方法的一个示例的示意图。
22.图16是表示本实施方式涉及的管理方法的一个示例的示意图。
23.图17是表示本实施方式涉及的管理方法的一个示例的示意图。
24.图18是表示本实施方式涉及的管理方法的一个示例的示意图。
25.图19是表示计算机系统的一个示例的框图。
具体实施方式
26.下面,参照附图来说明本发明涉及的实施方式,但本发明并不限于此。以下说明的实施方式的结构要素可适当组合。此外,还可以存在不使用部分结构要素的情况。
27.管理系统
28.图1是示意性地表示本实施方式涉及的管理系统1、无人驾驶车辆2、有人驾驶车辆9、以及装载机7的一个示例的图。无人驾驶车辆2、有人驾驶车辆9、以及装载机7分别在作业现场工作。在实施方式中,作业现场是矿山或采石场。矿山是指开采矿物质的场所或工厂。
29.无人驾驶车辆2是指不依赖于驾驶员的驾驶操作而在无人状态下工作的车辆。有人驾驶车辆9是指根据驾驶员的驾驶操作而工作的车辆。装载机7是指向无人驾驶车辆2及有人驾驶车辆9装载货物的作业机械。
30.无人驾驶车辆2及有人驾驶车辆9是作为在作业现场中行走而运载货物的运载车辆的一种的自卸车。装载机7例如是具有包括铲斗的作业机的液压挖掘机。作为由无人驾驶车辆2及有人驾驶车辆9运载的货物,举例有在矿山或采石场被挖掘出的矿石或砂土。另外,装载机7例如可以是具有包括铲斗的作业机的绳索挖掘机(rope excavator)或轮式装载机。
31.另外,作业现场并不限于矿山或采石场。作业现场只要是运载车辆运载货物的作业现场即可。
32.管理系统1具备管理装置3、通信系统4、无人驾驶车辆2、有人驾驶车辆9、以及装载机7。管理装置3例如设置于作业现场的管控设施5,并包括计算机系统。通信系统4实施管理装置3、无人驾驶车辆2、有人驾驶车辆9和装载机7之间的通信。无线通信设备6连接于管理装置3。通信系统4包括无线通信设备6。管理装置3、无人驾驶车辆2、有人驾驶车辆9和装载机7通过通信系统4进行无线通信。
33.无人驾驶车辆
34.无人驾驶车辆2例如基于从管理装置3发送的行走路线数据,在作业现场中行走。无人驾驶车辆2具备行走装置21、支承于行走装置21的车辆主体22、支承于车辆主体22的车斗23、以及控制装置30。
35.行走装置21具有驱动行走装置21的驱动装置24、对行走装置21进行制动的制动装置25、调整行走方向的转向装置26、以及车轮27。
36.车轮27旋转,由此无人驾驶车辆2自行。车轮27包括前轮27f以及后轮27r。车轮27安装有轮胎。
37.驱动装置24产生使无人驾驶车辆2加速的驱动力。驱动装置24包括如柴油发动机那样的内燃机。另外,驱动装置24还可以包括电动机。在驱动装置24产生的动力被传递至后轮27r。制动装置25产生使无人驾驶车辆2减速或停止的制动力。转向装置26可调整无人驾驶车辆2的行走方向。无人驾驶车辆2的行走方向包括车辆主体22的前部的朝向。转向装置
26通过对前轮27f进行转向操作来调整无人驾驶车辆2的行走方向。
38.控制装置30可与在无人驾驶车辆2外部的管理装置3进行通信。控制装置30输出使驱动装置24运转的油门指令、使制动装置25运转的制动指令、以及使转向装置26运转的转向指令。驱动装置24基于从控制装置30输出的油门指令,产生使无人驾驶车辆2加速的驱动力。通过调整驱动装置24的输出,来调整无人驾驶车辆2的行走速度。制动装置25基于从控制装置30输出的制动指令,产生使无人驾驶车辆2减速的制动力。转向装置26基于从控制装置30输出的转向指令,产生用于改变前轮27f朝向的力,以使无人驾驶车辆2直行或转向。
39.此外,无人驾驶车辆2具备检测无人驾驶车辆2的位置的位置检测装置28。无人驾驶车辆2的位置能够利用全球导航卫星系统(gnss:global navigation satellite system)来检测。全球导航卫星系统包括全球定位系统(gps:global positioning system)。全球导航卫星系统检测由维度、经度、以及高度的坐标数据规定的无人驾驶车辆2的绝对位置。通过全球导航卫星系统,能够检测在全局坐标系中规定的无人驾驶车辆2的位置。全局坐标系是指固定于地球的坐标系。位置检测装置28包括gnss接收设备,并检测无人驾驶车辆2的绝对位置(坐标)。
40.此外,无人驾驶车辆2具备无线通信设备29。通信系统4包括无线通信设备29。无线通信设备29可与管理装置3进行无线通信。
41.有人驾驶车辆
42.有人驾驶车辆9基于搭乘于有人驾驶车辆9的驾驶室的驾驶员的驾驶操作,在作业现场中行走。有人驾驶车辆9具备行走装置21、车辆主体22、车斗23、驱动装置24、制动装置25、转向装置26、包括前轮27f及后轮27r的车轮27、位置检测装置28、无线通信设备29、控制装置40、以及通知装置50。
43.有人驾驶车辆9的位置检测装置28检测有人驾驶车辆9的位置。有人驾驶车辆9的无线通信设备29可与管理装置3进行无线通信。
44.控制装置40可与在有人驾驶车辆9外部的管理装置3进行通信。在驾驶室内配置有使驱动装置24运转的油门踏板、使制动装置25运转的制动踏板、以及使转向装置26运转的方向盘。油门踏板、制动踏板、以及方向盘由驾驶员操作。驱动装置24基于油门踏板的操作量,产生使有人驾驶车辆9加速的驱动力。通过调整驱动装置24的输出,来调整有人驾驶车辆9的行走速度。制动装置25基于制动踏板的操作量,产生使有人驾驶车辆9减速的制动力。转向装置26基于方向盘的操作量,产生用于改变前轮27f朝向的力,以使有人驾驶车辆9直行或转向。
45.通知装置50配置于驾驶室。通知装置50基于从管理装置3发送的通知数据运转。在本实施方式中,通知装置50对后述的作业指令进行通知。作为通知装置50举例有将显示数据显示的显示装置以及输出语音的语音输出装置。作为显示装置举例有如液晶显示器(liquid crystal display,lcd)、或有机el显示器(organic electroluminescence display,oeld)那样的平板显示器。
46.装载机
47.装载机7基于搭乘于装载机7的操作室的操作员的操作,实施装载作业。装载机7具有作业机70、行走体71、回转体72、位置检测装置28、无线通信设备29、控制装置60、以及输入装置80。作业机70包括动臂、斗杆、以及铲斗。
48.控制装置60可与在装载机7外部的管理装置3进行通信。在操作室内配置有使作业机70运转的作业杆、使行走体71运转的行走杆、以及使回转体72回转的回转杆。
49.作业杆、行走杆、以及回转杆由操作员操作。作业机70基于作业杆的操作量,实施挖掘动作及倾卸动作。行走体71基于行走杆的操作量,进行行走及停止。回转体72基于回转杆的操作量,以回转轴为中心进行回转。
50.输入装置80例如配置于操作室。输入装置80通过操作员的操作,生成输入数据。作为输入装置80举例有按钮、开关、以及触控面板。
51.作业现场
52.图2是示意性地表示本实施方式涉及的作业现场的一个示例的图。无人驾驶车辆2及有人驾驶车辆9在矿山的作业场pa、以及通往作业场pa的行走路径hl中的至少一部分中行走。作业场pa包括装载场lpa及卸载场dpa中的至少一方。行走路径hl例如包括交叉点is。
53.装载场lpa是指,实施向无人驾驶车辆2及有人驾驶车辆9装载货物的装载作业的区域。装载机7在装载场lpa中工作。卸载场dpa是指,实施从无人驾驶车辆2及有人驾驶车辆9卸载货物的卸载作业的区域。在卸载场dpa例如设置有破碎机8。破碎机8是指,破碎从无人驾驶车辆2及有人驾驶车辆9所卸载的货物的作业机械。
54.无人驾驶车辆2基于表示无人驾驶车辆2的行走条件的行走路线数据,在作业现场中行走。如图2所示,行走路线数据包括隔开间隔地设定的多个路线点cp。路线点cp规定无人驾驶车辆2的目标位置。在多个路线点cp中分别设定有无人驾驶车辆2的目标行走速度及目标行走方位。此外,行走路线数据包括表示无人驾驶车辆2的目标行走路径的行走路线cr。行走路线cr由连接多个路线点cp的线规定。
55.行走路线cr设定在行走路径hl及作业场pa。无人驾驶车辆2按照行走路线cr在行走路径hl上行走。
56.行走路线数据在管理装置3中被生成出。管理装置3将生成出的行走路线数据经由通信系统4发送至无人驾驶车辆2的控制装置30。控制装置30基于行走路线数据控制行走装置21,以使无人驾驶车辆2按照行走路线cr行走,且按照在多个路线点cp中分别设定的目标行走速度及目标行走方位行走。
57.在本实施方式中,在行走路径hl及作业场pa中,无人驾驶车辆2和有人驾驶车辆9同时存在并工作。例如在作为作业场的装载场lpa中,无人驾驶车辆2和有人驾驶车辆9同时存在并工作。
58.管理装置及控制装置
59.图3是表示本实施方式涉及的管理系统1的一个示例的功能框图。管理系统1包括管理装置3、控制装置30、控制装置40、以及控制装置60。
60.管理装置3具有行走路线数据生成部3a、工作情况获取部3b、第一判断部3c、分配执行部3d、第二判断部3e、确定部3f、以及指令部3g。
61.行走路线数据生成部3a生成包括行走路线cr的行走路线数据。由行走路线数据生成部3a生成的行走路线数据被发送至无人驾驶车辆2的控制装置30。
62.工作情况获取部3b经由通信系统4获取在作业现场工作的无人驾驶车辆2及有人驾驶车辆9的工作情况。
63.无人驾驶车辆2及有人驾驶车辆9的工作情况包括无人驾驶车辆2的位置及有人驾
驶车辆9的位置。由位置检测装置28检测无人驾驶车辆2的位置及有人驾驶车辆9的位置。工作情况获取部3b能够通过接收位置检测装置28的检测数据,获取无人驾驶车辆2的位置及有人驾驶车辆9的位置。
64.第一判断部3c判断在作业现场的规定区域内是否有有人驾驶车辆9。第一判断部3c基于有人驾驶车辆9的位置,判断在规定区域内是否有有人驾驶车辆9。
65.在本实施方式中,第一判断部3c基于在装载场lpa工作的无人驾驶车辆2及有人驾驶车辆9的工作状态,判断在作业现场的规定区域内是否有等待获取针对装载场lpa内设定的装载点lp的进入指令的无人驾驶车辆2及有人驾驶车辆9。作业现场的规定区域例如是装载场lpa的规定区域。作为一个示例,规定区域是指,图17及图18示出的有人驾驶车辆9(a)、有人驾驶车辆9(b)、以及有人驾驶车辆9(c)那样的、与装载场lpa的等待位置wp及装载点lp不同的区域。第一判断部3c通过比对有人驾驶车辆9的位置坐标与规定区域的位置坐标,判断在规定区域内是否有有人驾驶车辆9。另外,在规定区域内是否有有人驾驶车辆9的判断,也可以比对有人驾驶车辆9的位置坐标与装载场lpa的等待位置wp的坐标及装载点lp的坐标的方式进行。在装载场lpa中至少设定有一处装载点lp。在本实施方式中,设定了两处装载点lp。装载点lp是由装载机7实施装载作业的作业点。第一判断部3c判断在等待位置wp上是否有等待获取进入指令的有人驾驶车辆9。另外,在等待位置wp上是否有有人驾驶车辆9的判断,也可以比对有人驾驶车辆9的位置坐标与装载场lpa的等待位置wp的坐标的方式进行。第一判断部3c包括等待获取针对装载点lpa的进入指令的有人驾驶车辆9的存在与否。同样地,第一判断部3c通过比对无人驾驶车辆2的位置坐标与规定区域的位置坐标,判断在规定区域内是否有无人驾驶车辆2。
66.分配执行部3d基于第一判断部3c的判断结果,向装载场lpa内设定的至少一个装载点lp分配无人驾驶车辆2或在规定区域内的有人驾驶车辆9分配至装载点lpa。此外,在装载场lpa内设定的等待位置wp上无等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9时,分配执行部3d对在装载场lpa的入口等待的无人驾驶车辆2或有人驾驶车辆9分配装载点lpa。分配执行部3d相比于在装载场lpa的入口等待的无人驾驶车辆2或有人驾驶车辆9优先对在规定区域内的有人驾驶车辆9分配装载点lp。
67.第二判断部3e经由通信系统4接收设置于装载机7的输入装置80的输入数据。装载机7的操作员通过操作输入装置80,生成使无人驾驶车辆2或有人驾驶车辆9进入装载点lp的输入数据、以及使无人驾驶车辆2或有人驾驶车辆9从装载点lp退出的输入数据。第二判断部3e基于输入装置80的输入数据及分配结果,判断是否使无人驾驶车辆2或有人驾驶车辆9进入装载点lp。第二判断部3e基于输入装置80的输入数据及分配结果,判断是否使无人驾驶车辆2或有人驾驶车辆9从装载点lp退出。
68.确定部3f确定作业现场的运载车辆是无人驾驶车辆2或有人驾驶车辆9。确定部3f基于无人驾驶车辆2或有人驾驶车辆9的车辆数据,确定运载车辆是无人驾驶车辆2或有人驾驶车辆9。在无人驾驶车辆2或有人驾驶车辆9的各车辆中,作为车辆数据包含有能够判别是否是无人驾驶车辆2或有人驾驶车辆9的信息。例如,与有人驾驶车辆或无人驾驶车辆的序列号信息相关联地向有人驾驶车辆事先登记序列号a、向无人驾驶车辆事先登记序列号b等。确定部3f基于能够判别无人驾驶车辆2或有人驾驶车辆9的信息,确定运载车辆是无人驾驶车辆2或有人驾驶车辆9。另外,只要能够将用于确定车辆的信息与能够确定无人驾驶
车辆2或有人驾驶车辆9的信息相关联起来,可以使用其他方法。
69.指令部3g基于第一判断部3c的判断结果,输出使无人驾驶车辆2或有人驾驶车辆9向在装载场lpa中设定的装载点lp或等待位置wp行走的作业指令。此外,指令部3g基于来自装载机7的输入装置80的输入数据,向无人驾驶车辆2或有人驾驶车辆9输出作业指令。指令部3g基于第二判断部3e的判断结果,向无人驾驶车辆2或有人驾驶车辆9输出作业指令。此外,指令部3g基于分配执行部3d的分配结果,向无人驾驶车辆2或有人驾驶车辆9输出分配指令。指令部3g基于确定部3f的确定结果,输出使无人驾驶车辆2或有人驾驶车辆9向作为规定停车位置的作业点行走的作业指令。作为停车位置的作业点例如是装载点lp。
70.输出至无人驾驶车辆2的作业指令包括使无人驾驶车辆2行走的指令。输出至有人驾驶车辆9的作业指令包括使有人驾驶车辆9的通知装置50输出的引导数据。
71.使无人驾驶车辆2行走的指令例如是使无人驾驶车辆2进入装载点lp的进入指令、使无人驾驶车辆2进入等待位置wp的进入指令、或者使无人驾驶车辆2从装载点lp退出的退出指令等。
72.输出至无人驾驶车辆2的分配指令例如是使无人驾驶车辆2进入装载点lp的进入指令、使无人驾驶车辆2进入等待位置wp的进入指令、或者使无人驾驶车辆2从装载点lp退出的退出指令等。
73.使有人驾驶车辆9的通知装置50输出的引导数据例如是用于通知使有人驾驶车辆9进入装载点lp的进入指令的进入引导数据、使有人驾驶车辆9进入等待位置wp的进入引导数据、或者用于通知使有人驾驶车辆9从装载点lp退出的退出指令的退出引导数据等。
74.输出至有人驾驶车辆9的分配指令包括用于通知分配指令的分配引导数据。分配引导数据例如是驾驶有人驾驶车辆的驾驶员能够识别需要进入的装载点lp或等待位置wp、即作业点的数据等。
75.指令部3g经由通信系统4向无人驾驶车辆2及有人驾驶车辆9发送作业指令。指令部3g经由通信系统4向无人驾驶车辆2及有人驾驶车辆9发送分配指令。
76.控制装置30获取从行走路线数据生成部3a发送的无人驾驶车辆2的行走路线数据,并控制无人驾驶车辆2的行走。控制装置30控制无人驾驶车辆2的行走装置21,以使其按照行走路线数据行走。此外,控制装置30基于从指令部3g发送的作业指令,控制无人驾驶车辆2的行走。
77.控制装置40基于从指令部3g发送的分配指令或作业指令,控制通知装置50。通知装置50基于从指令部3g输出的分配指令或作业指令运转。如上所述,输出至有人驾驶车辆9的分配指令包括用于通知分配指令的分配引导数据。输出至有人驾驶车辆9的作业指令例如是使有人驾驶车辆9进入装载点lp的进入引导数据、使有人驾驶车辆9进入等待位置wp的进入引导数据、或者使有人驾驶车辆9从装载点lp退出的退出引导数据等。控制装置40控制通知装置50,以使通知装置50输出分配引导数据、进入引导数据、以及退出引导数据。通知装置50用于通知分配引导数据、进入引导数据、以及退出引导数据。
78.控制装置60向管理装置3发送通过操作输入装置80而生成的输入数据。
79.在装载场中的动作
80.图4是示意性地表示本实施方式涉及的装载场lpa的一个示例的图。如图4所示,装载机7在装载场lpa中工作。在装载场lpa中设定有由装载机7实施装载作业的装载点lp。在
本实施方式中,装载点lp包括作为第一作业点的第一装载点lp1及作为第二作业点的第二装载点lp2。第一装载点lp1设定在装载机7的一侧。第二装载点lp2设定在装载机7的另一侧。装载机7在结束了对在第一装载点lp1上的无人驾驶车辆2或有人驾驶车辆9的第一装载作业后,执行对在第二装载点lp2上的无人驾驶车辆2或有人驾驶车辆9的第二装载作业。在结束了对在第二装载点lp2内的无人驾驶车辆2或有人驾驶车辆9的第二装载作业后,执行对在上述第一装载作业结束后进入第一装载点lp1的无人驾驶车辆2或有人驾驶车辆9的第一装载作业。即,装载机7在结束了第一装载作业及第二装载作业中的一方装载作业后,执行另一方的装载作业,来反复执行这些第一装载作业及第二装载作业,即执行所谓的两侧装载作业。
81.此外,在装载场lpa内设定有等待获取进入指令的等待位置wp。在本实施方式中,等待位置wp包括第一等待位置wp1及第二等待位置wp2。第一装载点lp1与第一等待位置wp1相对应,第二装载点lp2与第二等待位置wp2相对应。已被输入了分配指令的无人驾驶车辆2或有人驾驶车辆9在等待位置wp上等待。无人驾驶车辆2或有人驾驶车辆9在等待位置wp上等待获取进入指令。
82.此外,在装载场lpa的入口设定有用于等待获取分配指令的等待进入位置as。等待进入位置as设定于行走路径hl的一部分。另外,等待进入位置as可以设定于装载场lpa的内侧。无人驾驶车辆2或有人驾驶车辆9在等待进入位置as上等待获取分配指令。
83.分配执行部3d对在等待进入位置as上等待获取分配指令的无人驾驶车辆2或有人驾驶车辆9执行如下分配处理:分配第一装载点lp1及第二装载点lp2中需要进入的装载点lp。
84.第一判断部3c判断在等待位置wp上是否有等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9。在判断为在等待位置wp上无等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9时,分配执行部3d执行分配处理。无人驾驶车辆2或有人驾驶车辆9在等待进入位置as上等待时,分配执行部向第一作业点lp1或第二作业点lp2分配无人驾驶车辆2或有人驾驶车辆9。作为一个示例,在第二作业点lp2上有其他车辆(无人驾驶车辆2或有人驾驶车辆9),且有人驾驶车辆9在等待进入位置as上等待时,分配执行部3d向第一作业点lp1分配有人驾驶车辆9。若已执行了分配处理,则指令部3g基于分配处理的结果,向有人驾驶车辆9输出分配指令。
85.在向有人驾驶车辆9输出了分配指令时,有人驾驶车辆9的控制装置40基于从指令部3g发送的分配指令,控制通知装置50。控制装置40控制通知装置50,以使其输出用于通知分配指令的分配引导数据。
86.图5是示意性地表示本实施方式涉及的通知装置50的一个示例的图。图5表示输出了使有人驾驶车辆9向第一作业点lp1行走的分配指令的示例。在通知装置50包括显示装置时,使有人驾驶车辆9进入第一作业点lp1的分配引导数据作为显示数据显示在显示装置。在图5示出的示例中,显示了表示第一等待位置wp1的图标51a,且显示了向第一等待位置wp1行走的文字数据51b。另外,图5是一个示例。只要是能够向有人驾驶车辆9的驾驶员通知有人驾驶车辆9需要向第一作业点lp1行走,可以使用其他显示方法。在通知装置50包括语音输出装置时,还可以通过语音进行通知。
87.另外,在图5示出的示例中,分配引导数据的显示数据包括:表示装载机7的标志;
表示在装载点lp上有无人驾驶车辆2或有人驾驶车辆9的标志;能够获知等待位置wp存在两处的标记、即虚线;以及表示无人驾驶车辆2或有人驾驶车辆9需要前往的等待位置wp的标记、即双重虚线。表示无人驾驶车辆2或有人驾驶车辆9需要前往的等待位置wp的标记处于与另一个等待位置wp不同的显示状态,另外在显示数据中,表示等待位置wp的标记可以是能够获知无人驾驶车辆2或有人驾驶车辆9的前后方向的标记。
88.第二判断部3e对在等待位置wp上等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9执行如下进入判断处理:判断是否使其进入第一装载点lp1及第二装载点lp2中被分配的装载点lp。
89.作为一个示例,被分配了第一作业点lp1的有人驾驶车辆9在等待位置wp上等待时,第二判断部3e基于输入装置80的输入数据,判断是否使有人驾驶车辆9进入第一作业点lp1。例如,在基于输入装置80的输入数据,判断为在第一作业点lp1上实施了装载作业的其他车辆从第一作业点lp1退出时,第二判断部3e决定使有人驾驶车辆9进入第一作业点lp1。指令部3g基于由第二判断部3e进行的进入判断处理的结果,向有人驾驶车辆9输出进入指令。
90.在向有人驾驶车辆9输出了进入指令时,有人驾驶车辆9的控制装置40基于从指令部3g发送的进入指令控制通知装置50。控制装置40控制通知装置50,以使其输出使有人驾驶车辆9进入被分配的装载点lp的进入引导数据。
91.图6是示意性地表示本实施方式涉及的通知装置50的一个示例的图。图6表示向有人驾驶车辆9输出向第一装载点lp1行走的进入指令的示例。在通知装置50包括显示装置时,使有人驾驶车辆9进入第一装载点lp1的进入引导数据作为显示数据显示在显示装置。在图6所示的示例中,显示了表示第一装载点lp1的图标52a,且显示了进入第一装载点lp1的文字数据52b。另外,图6是一个示例。只要是能够向有人驾驶车辆9的驾驶员通知有人驾驶车辆9需要进入第一装载点lp1,可以使用其他显示方法。在通知装置50包括语音输出装置时,还可以通过语音进行通知。
92.另外,图5及图6示出的示例中,显示装置中显示有:作为表示装载机7的显示状态的标志;作为表示在装载点lp上有无人驾驶车辆2或有人驾驶车辆9的显示状态的标志;作为表示等待位置wp的显示状态的虚线;作为表示无人驾驶车辆2或有人驾驶车辆9需要前往的装载点lp的显示状态的双重虚线等,同时一同显示有作为引导发挥作用的文字数据51b及文字数据52b。另外,表示等待位置wp的显示状态可以是能够获知无人驾驶车辆2或有人驾驶车辆9的前后方向的显示状态。
93.在通知装置50包括显示装置时,使有人驾驶车辆9从第二装载点lp2退出的退出引导数据作为显示数据显示在显示装置。在通知装置50包括语音输出装置时,还可以通过语音进行通知。在通知装置50包括灯等发光装置时,可以通过光进行通知。
94.管理方法
95.图7至图13是表示本实施方式涉及的管理方法的一个示例的示意图。图14是表示本实施方式涉及的管理方法的一个示例的流程图。
96.如图7所示,在第一装载点lp1执行无人驾驶车辆2的装载作业,且有人驾驶车辆9在等待进入位置as上等待。由确定部3f确定在等待进入位置as上等待的车辆是有人驾驶车辆。
97.第一判断部3c判断在等待位置wp上是否有等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9(步骤s1)。
98.在步骤s1中,在判断为在所有的等待位置wp上都有等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9时(步骤s1中的“是”),不执行分配处理。
99.在步骤s1中,在判断为至少在一个等待位置wp上无等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9时(步骤s1中的“否”),分配执行部3d对在等待进入位置as上等待的有人驾驶车辆9进行分配处理(步骤s2)。
100.分配执行部3d向在装载点上无运载车辆的第二装载点lp2分配有人驾驶车辆9。指令部3g向在等待进入位置as上等待的有人驾驶车辆9输出分配指令(步骤s3)。通过被输入分配指令,有人驾驶车辆9的通知装置50如参照图5所说明的那样输出分配引导数据。
101.如图8所示,有人驾驶车辆9的驾驶员根据分配指令掌握需要移动的等待位置wp,并使有人驾驶车辆9移动至第二等待位置wp2。如图9所示,有人驾驶车辆9在第二等待位置wp2上等待。
102.装载机7的驾驶员为了使在第二等待位置wp2上等待的有人驾驶车辆9进入第二装载点lp2而操作输入装置80。作为输入装置80例如举例有按钮、开关、以及触控面板。为了使有人驾驶车辆9进入第二装载点lp2,驾驶员操作按钮、开关、以及触控面板中的至少一种。
103.在使在第一装载点lp1上的无人驾驶车辆2从第一装载点lp1退出之前,装载机7的驾驶员能够使有人驾驶车辆9进入第二装载点lp2。
104.第二判断部3e基于输入装置80的输入数据,判断是否使有人驾驶车辆9进入第二装载点lp2(步骤s4)。
105.此时,装载机7的驾驶员例如能够在确认完车斗23内无货物、以及在待进入的有人驾驶车辆9的前方无障碍物等后,使其进入。
106.在步骤s4中,在判断为不许有人驾驶车辆9进入第二装载点lp2时(步骤s4中的“否”),不输出进入指令。
107.在步骤s4中,在判断为允许有人驾驶车辆9进入第二装载点lp2时(步骤s4中的“是”),指令部3g向在第二等待位置wp2上等待的有人驾驶车辆9输出进入指令(步骤s5)。
108.在第二等待位置wp2上等待的有人驾驶车辆9被分配有第二装载点lp2。通过被输入进入指令,有人驾驶车辆9的通知装置50如参照图6所说明的那样输出表示需要进入第二装载点lp2的进入引导数据。
109.如图10所示,有人驾驶车辆9的驾驶员使有人驾驶车辆9进入第二装载点lp2。如图11所示,在对第一装载点lp1的无人驾驶车辆2的装载作业结束之前,有人驾驶车辆9进入第二装载点lp2。通过在对第一装载点lp1的运载车辆的装载作业的执行中,使运载车辆配置于第二装载点lp2,能够在对第一装载点lp1的运载车辆的装载作业结束后,立刻执行对第二装载点lp2的运载车辆的装载作业。由此,能够抑制作业现场的生产效率的下降。
110.在对第一装载点lp1的无人驾驶车辆2的装载作业结束后,装载机7的驾驶员为了使无人驾驶车辆2从第一装载点lp1退出而操作输入装置80。
111.第二判断部3e基于输入装置80的输入数据,判断是否允许无人驾驶车辆2从第一装载点lp1退出(步骤s6)。
112.此时,装载机7的驾驶员例如能够在确认完车斗23内装载了货物、以及在待退出的
无人驾驶车辆2的前方无障碍物等后,使其退出。
113.在步骤s6中,在判断为不许无人驾驶车辆2从第一装载点lp1退出时(步骤s6中的“否”),不输出退出指令。
114.在步骤s6中,在判断为允许无人驾驶车辆2从第一装载点lp1退出时(步骤s6中的“是”),指令部3g向无人驾驶车辆2输出退出指令(步骤s7)。由此,如图12所示,无人驾驶车辆2从第一装载点lp1退出。
115.如图13所示,下一辆的有人驾驶车辆9到达等待进入位置as。第一判断部3c判断是否有等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9(步骤s1)。在无等待获取进入指令的无人驾驶车辆2或有人驾驶车辆9时,分配执行部3d对在等待进入位置as上等待的有人驾驶车辆9执行分配处理(步骤s2)。
116.之后,反复执行上述处理。
117.另外,在等待进入位置as上无人驾驶车辆2等待时,无人驾驶车辆2基于分配指令和来自指令部3g的作业指令,移动至等待位置wp。在向等待位置wp上等待的无人驾驶车辆2输出了进入指令时,在等待位置wp上等待的无人驾驶车辆2基于进入指令进入被分配的装载位置lp,在等待进入位置as上有新的无人驾驶车辆2等待时,基于分配指令和作业指令,使其移动至被分配的等待位置wp。
118.另外,例如在对第二装载点lp2上的有人驾驶车辆9的装载作业结束时,装载机7的驾驶员为了使有人驾驶车辆9从第二装载点lp2退出而操作输入装置80。指令部3g向有人驾驶车辆9输出退出指令。由此,有人驾驶车辆9的通知装置50输出退出引导数据。
119.分配被保留的情况
120.图15是表示本实施方式涉及的管理方法的一个示例的示意图。在上述实施方式中,如图15所示,在所有的等待位置wp上都有等待获取针对第一装载点lp1或第二装载点lp2的进入指令的无人驾驶车辆2或有人驾驶车辆9时,分配执行部3d保留分配处理。被保留了分配处理的无人驾驶车辆2或有人驾驶车辆9在装载场lpa的外侧等待。
121.在图15所示的示例的情况下,由于不明确哪一装载点lp的装载作业先实施,分配执行部3d不执行分配处理。
122.分配顺序
123.图16至图18是表示实施方式涉及的管理方法的一个示例的示意图。如图16所示,在装载场lpa的入口有多个等待的无人驾驶车辆2或有人驾驶车辆9时,分配执行部3d能够向装载点lp分配在装载场lpa的入口等待的多个无人驾驶车辆2或有人驾驶车辆9中最前列的无人驾驶车辆2或有人驾驶车辆9。
124.图17及图18是表示有人驾驶车辆9进入装载场的规定区域时的管理方法的一个示例的示意图。在有人驾驶车辆9中,能够想到通过有人驾驶车辆9的驾驶员的判断进入装载场lpa后等待,而不是在如图16所示的装载场lpa的入口等待。
125.如图17所示,在与设定于装载场lpa的等待位置wp不同的规定区域内有多个有人驾驶车辆9时,分配执行部3d能够向装载点lp分配在装载场lpa的规定区域内的多个有人驾驶车辆9中规定的有人驾驶车辆9。分配执行部3d能够向装载点lp分配在规定区域内的多个有人驾驶车辆9中例如与装载点lp接近的有人驾驶车辆9。因此,与装载点lp接近的有人驾驶车辆9能够进入与被分配的装载点lp对应的等待位置wp。
126.如图18所示,在装载场lpa内有多个有人驾驶车辆9时,分配执行部3d能够向装载点lp分配多个有人驾驶车辆9中规定的有人驾驶车辆9。分配执行部3d能够向装载点lp分配在规定区域内的多个有人驾驶车辆9中例如最先进入了装载场lpa的有人驾驶车辆9。最先进入的有人驾驶车辆9是指等待时间长的有人驾驶车辆9。因此,最先进入了装载场lpa的有人驾驶车辆9能够进入与被分配的装载点对应的等待位置wp。
127.另外,分配至装载点lp的有人驾驶车辆不局限于与装载点lp接近的有人驾驶车辆、或最先进入了装载场lpa的有人驾驶车辆,只要是以规定的条件被选择的有人驾驶车辆9被分配即可。
128.此外,在图17及图18的示例中,例如在等待进入位置as上有车辆等待时,优选分配执行部3d相对于在等待进入位置as上等待的车辆优先将在装载场lpa的规定区域内的车辆分配至装载点。此外,在规定区域内的有人驾驶车辆9可以是一台。
129.计算机系统
130.图19是表示计算机系统1000的一个示例的框图。上述的管理装置3、控制装置30、控制装置40、以及控制装置60分别包括计算机系统1000。计算机系统1000包括:处理器1001,例如cpu(central processing unit,中央处理单元);主内存1002,其包括rom(read only memory,只读存储器)这类非易失性内存及ram(random access memory,随机存取存储器)这类易失性内存;存储装置1003;以及包括输入输出电路的接口1004。上述的管理装置3、控制装置30、控制装置40、以及控制装置60的各自功能以程序的形式存储于存储装置1003。处理器1001从存储装置1003读取程序并在主内存1002中加载,按照程序执行上述处理。另外,也可以将程序通过网络传输至计算机系统1000。
131.程序能够按照上述实施方式使计算机系统1000执行:判断在作业现场的规定区域内是否有有人驾驶车辆9;以及基于判断结果,输出使无人驾驶车辆2或有人驾驶车辆9向设置于作业场的作业点行走的作业指令。
132.效果
133.如上所述,根据本实施方式,基于在作业现场的规定区域内是否有有人驾驶车辆9的判断结果,输出使无人驾驶车辆2或有人驾驶车辆9向在作业场设定的作为作业点的装载点行走的作业指令。由此,在无人驾驶车辆2和有人驾驶车辆9同时存在并工作的情况下,即使在有人驾驶车辆9进入作业场的规定区域时,也能够高效率地分配无人驾驶车辆2及有人驾驶车辆9。即使在规定区域内规定区域内有有人驾驶车辆9时,也能够使无人驾驶车辆2和有人驾驶车辆9相同地运行。由此,能够抑制装载作业的生产效率的下降。
134.此外,根据本实施方式,设置有:确定部3f,其用于确定作业现场的运载车辆是无人驾驶车辆2或有人驾驶车辆9、以及指令部3g,其基于确定结果输出使无人驾驶车辆2或有人驾驶车辆9向规定停车位置行走的作业指令。由此,在无人驾驶车辆2和有人驾驶车辆9同时存在并工作的情况下,也能够使无人驾驶车辆2和有人驾驶车辆9相同地运行。由此,能够抑制装载作业的生产效率的下降。
135.其他实施方式
136.在上述实施方式中,可以将控制装置30的功能、控制装置40的功能、以及控制装置60的功能中的至少一部分设置于管理装置3,也可以将管理装置3的功能的至少一部分设置于控制装置30、控制装置40、以及控制装置60。
137.在上述实施方式中说明的是,在管理装置3生成行走路线数据,且无人驾驶车辆2按照从管理装置3发送的行走路线数据行走。但可以由无人驾驶车辆2的控制装置30生成行走路线数据。即,控制装置30可以具有行走路线数据生成部3a。此外,管理装置3及控制装置30也可以分别具有行走路线数据生成部3a。
138.在上述实施方式中说明的是,控制装置60向管理装置3发送通过操作输入装置80而生成的输入数据。控制装置60可以不经由管理装置3而向无人驾驶车辆2及有人驾驶车辆9发送输入数据。即,可以通过车辆间通信,从装载机7向无人驾驶车辆2及有人驾驶车辆9发送输入数据。
139.在上述实施方式中说明的是,无人驾驶车辆2是作为运载车辆的一种的自卸车。无人驾驶车辆2例如可以是具备如液压挖掘机或推土机那样的作业机的作业机械。
140.在上述实施方式中说明的是,装载机7基于搭乘于装载机7的操作室的操作员的操作,实施装载作业。装载机7可以被远程控制。在装载机7被远程控制时,操作员可以不搭乘于装载机7的操作室。
141.在上述实施方式中说明的是,在装载机7的两侧设定有装载点lp的两侧装载作业中,作业指令等被输出。也可以在装载机7的一侧设定有装载点lp的一侧装载作业中,作业指令等被输出。
142.另外,在一侧装载作业中,由于只有一处装载点lp,不需要装载点lp的分配。因此,在一侧装载作业中,可以省略分配执行部3d。
143.在上述实施方式中说明的是,执行步骤s4及步骤s6,但也可以根据需要不必执行步骤s4及步骤s6中的一方或两方。此时,例如只要是基于通过由装载机7的驾驶员对输入装置80的操作而生成的输入数据,进入指令或退出指令被输出至无人驾驶车辆2或有人驾驶车辆9即可。
144.在上述实施方式中说明的是,分配执行部3d将第一装载点lp1作为第一作业点进行分配,并将第二装载点lp2作为第二作业点进行分配,但也可以将第一等待位置wp1作为第一作业点进行分配,并将第二等待位置wp2作为第二作业点进行分配。此时,分配执行部3d可以分别输出向等待位置wp的分配指令和向装载点lp的分配指令。
145.在上述实施方式中说明的是,装载机7是液压挖掘机。装载机7例如可以是绳索挖掘机或轮式装载机。
146.在上述实施方式中说明的是,作业点是设定于装载场lpa的装载点lp。作业点可以是设定于卸载场dpa的卸载点。卸载点是对破碎机8实施卸载作业的作业点。作业点除装载点lp、卸载点以外可以是设定于装载场lpa的等待位置wp,只要是事先设定的位置即可。
147.在上述实施方式中说明的是,指令部3g基于由装载机7的操作员操作的输入装置80的输入数据,向无人驾驶车辆2及有人驾驶车辆9输出作业指令。在卸载场设置有输入装置时,指令部3g可以基于卸载场的输入装置的输入数据,向无人驾驶车辆2及有人驾驶车辆9输出作业指令。
148.符号说明
[0149]1…
管理系统、2
…
无人驾驶车辆、3
…
管理装置、3a
…
行走路线数据生成部、3b
…
工作情况获取部、3c
…
第一判断部、3d
…
分配执行部、3e
…
第二判断部、3f
…
确定部、3g
…
指令部、4
…
通信系统、5
…
管控设施、6
…
无线通信设备、7
…
装载机、8
…
破碎机、9
…
有人驾驶车
辆、21
…
行走装置、22
…
车辆主体、23
…
车斗、24
…
驱动装置、25
…
制动装置、26
…
转向装置、27
…
车轮、27f
…
前轮、27r
…
后轮、28
…
位置检测装置、29
…
无线通信设备、30
…
控制装置、40
…
控制装置、50
…
通知装置、60
…
控制装置、70
…
作业机、71
…
行走体、72
…
回转体、80
…
输入装置、as
…
等待进入位置、cp
…
路线点、cr
…
行走路线、pa
…
作业场、dpa
…
卸载场、lp
…
装载点、lp1
…
第一装载点、lp2
…
第二装载点、lpa
…
装载场、hl
…
行走路径、is
…
交叉点、wp
…
等待位置、wp1
…
第一等待位置、wp2
…
第二等待位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。