1.本公开涉及液体排出装置和液体排出设备。
背景技术:
2.一种液体排出装置包括将液体排出到储气瓶(圆筒)、飞机、车辆等表面以在该表面上印刷的装置。
3.一种液体排出装置包括:头阵列;使头阵列往复移动的直线导轨;多关节机器人,包括将直线导轨适当地移动到预定位置并将直线导轨保持在预定位置的机器人臂;基于位置信息控制驱动机器人臂的机器人臂控制器;以及向机器人臂控制器提供位置信息并与该位置信息连动驱动和控制头阵列中的预定喷墨喷嘴的控制器(专利文献1)。
4.引文列表
5.专利文献
6.【专利文献1】jp
‑
2015
‑
027636
‑
a
技术实现要素:
7.技术问题
8.一种使用头排出液体的装置,包括清洁器(维护装置),用于保持和恢复装置主体喷嘴面(排出面)的状态,该装置以预定时间将液体排出头移动到清洁器的位置。
9.因此,具有打印头扫描距离长的装置存在诸如伴随清洁动作的停机时间变长、打印速度降低的问题。
10.根据本发明实施例的液体排出装置解决了上述问题,并在必要时清洁喷嘴面。
11.解决问题的方案
12.在本发明的一个方面中,液体排出装置包括:液体排出头,包括配置为排出液体的喷嘴;滑架,安装所述液体排出头,并可移动;擦拭器,配置为擦拭所述液体排出头的喷嘴面;以及擦拭器移动器,配置为在所述擦拭器面对所述喷嘴面的面对位置和所述擦拭器不面对所述喷嘴面的待机位置之间保持和移动所述擦拭器。所述滑架可移动地将所述液体排出头和所述擦拭器移动器保持为单个单元。
13.在本发明的另一方面中,液体排出装置包括:液体排出头,包括喷嘴面,其中形成有喷嘴,所述液体排出头配置为从所述喷嘴排出液体;擦拭器,配置为接触所述液体排出头的所述喷嘴面;清洁液体施加器,配置为向所述擦拭器施加清洁液体;清洁液体回收器,位于所述擦拭器下方,所述清洁液体回收器配置为接收施加到所述擦拭器的所述清洁液体;擦拭器移动器,配置为在所述擦拭器面对所述喷嘴面的面对位置和所述擦拭器不面对所述喷嘴面的待机位置之间移动所述擦拭器、所述清洁液体施加器和所述清洁液体回收器;以及导向器,配置为所述擦拭器在所述面对位置和所述待机位置之间移动期间,保持水平面和所述清洁液体回收器之间的倾斜恒定。
14.本发明的效果
15.根据本发明的实施例,喷嘴面可以在必要时得到清洁。
附图说明
16.图1是根据本发明的第一实施例的液体排出设备的示意图;
17.图2是图1的液体排出设备的示意图;
18.图3是图1的液体排出设备的示意性平面图;
19.图4是图1的液体排出设备中的控制器的电路图;
20.图5是说明打印区域和打印数据之间关系的液体排出设备的示意图;
21.图6是说明在印刷圆筒的整个圆周时的分割印刷区域的例子的圆筒的示意图;
22.图7是由控制器执行的控制器的打印操作的控制的流程图;
23.图8a和图8b(图8)是在液体排出设备的打印操作期间表示打印头的轨迹的圆筒的示意性侧视图;
24.图9是根据本发明第一实施例的液体排出设备的示意图;
25.图10是图9的液体排出设备的示意图;
26.图11是图9和图10的头部的正视图;
27.图12是清洁机构的清洁液体供应系统和清洁操作的电路图;
28.图13是根据第一实施例的头部的一个喷嘴部分的示意性横截面视图;
29.图14a至图14c(图14)是表示磁头动作的驱动电压的示例的波形图;
30.图15是向头部供给液体的液体供给系统的电路图;
31.图16是控制器进行清洁操作的实例的流程图;
32.图17是由清洁控制器执行的清洁操作的控制的流程图;
33.图18是根据本发明的第二实施例的液体排出设备的立体图;
34.图19是根据本发明第三实施例的液体排出设备的示意图,其中,液体排出设备将飞机上的图像作为待打印的对象打印;
35.图20是根据第三实施例的图19的液体排出设备的放大立体图;
36.图21是根据本发明的第四实施例的液体排出设备的示意图;
37.图22是图21的液体排出设备的驱动器的立体图;
38.图23a和图23b(图23)说明根据本发明第五实施例的液体排出设备;
39.图24是根据第五实施例的滑架的正视图;
40.图25是根据第五实施例的图24的滑架的示意图;
41.图26是根据第五实施例的图24和图25的滑架的示意侧视图;
42.图27是说明本发明第五实施例中的控制系统的电路图;
43.图28是表示本发明第五实施例中的液体供应系统的电路图;
44.图29是说明第五实施例中绘图动作的控制的流程图;
45.图30a和图30b(图30)说明滑架在第五实施例中的移动轨迹;
46.图31a和图31b(图31)表示了第五实施例中的擦拭器单元;
47.图32a和图32b(图32)是图31a和图31b的擦拭器单元在第五实施例中的部分放大图;
48.图33是说明第五实施例中维护操作的控制的流程图;
49.图34是表示第五实施例中维护操作的擦拭器单元的俯视图;
50.图35a和图35b(图35)是根据本公开的第六实施例(第一变型)的擦拭器单元的立体图;
51.图36a和图36b(图36)是根据本发明的第七实施例(第二变型)的擦拭器单元的立体图;
52.图37是表示第七实施例(第二变型)中液体排出设备的维护操作的控制的流程图;
53.图38是表示第七实施例(第二变型)中的维护操作的擦拭器单元的俯视图;
54.图39a至图39d(图39)是磁头和擦拭器单元的正视图,图示了第七实施例(第二变型)中的维护动作;
55.图40是根据本公开的第八实施例(第三变型)绘制飞机上的图像作为绘图对象的实施例中的液体排出设备的示意图;
56.图41是根据第八实施例(第三变型)的液体排出设备的放大立体图;
57.图42是根据本发明第九实施例(第四变型)的液体排出设备的立体图;
58.图43是根据第九实施例(第四变型)的液体排出设备的驱动器的立体图;
59.图44是第九实施例(第四变型)中的绘制操作的流程图。
具体实施方式
60.现在参照附图,其中类似的附图标记在几个图中表示相同或相应的部分,下面描述本发明的实施例。本发明的第一实施例参照图1至图3描述,图1是根据本发明第一实施例的液体排出设备的示意侧视图,图2是第一实施例的液体排出设备的正视图,图3是第一实施例的液体排出设备的平面图。
61.液体排出设备1包括将圆筒2(储气瓶)安装在基座10上的安装台11和固定保持安装在安装台11上的圆筒2的固定部12。圆筒2是作为印刷对象物的柱状部件。液体排出设备1还包括液体排出装置13,该液体排出装置13包括将液体排出到圆筒2的周面上的头300和安装在基座10上的滑架14。
62.安装台11包括可旋转地安装在基座10上的转盘,因此,液体排出设备1可以在安装在安装台11上的圆筒2的圆周面的一半上进行打印,然后使圆筒2旋转半周(旋转180度)之后,在圆筒2的圆周面的另一半上进行打印。安装台11可以固定,圆筒2可以手动旋转。此外,即使安装台11可以旋转,也可以采用诸如安装台11手动旋转或由诸如电机的驱动器驱动旋转的任何结构。
63.固定部12通过安装在基座10的安装台11一侧的支柱51可上下移动地保持,固定部12包括可转动臂22、由臂22保持的保持件23和使可转动臂22移动的电机。保持件23安装在安装台11的圆筒2的顶部。保持件23可根据圆筒2上部的形状和尺寸用附件方式进行更换。
64.滑架14可沿安装在安装台11上的圆筒2的高度方向的第一方向(y方向)和与圆筒2的轴线正交的第二方向(x方向)往复移动。在本实施例中,柱状部件是在圆筒2的侧面具有弧形形状的圆筒2,第二方向(x方向)是在与第一方向(y方向)正交的平面内,平行于圆筒2的弧形周面的切线的方向。
65.在本发明的液体排出设备1中,在基座10的安装台11的一侧立设的框架15的支承部51(参照图2)之间保持滑块16,滑块16可沿支承部51的长度方向(高度方向)沿y方向移
动,滑块16保持滑架14,使滑架14可沿x方向移动。
66.液体排出设备1还包括使滑块16沿y方向垂直移动的垂直移动机构17(y方向扫描机构)和使滑块14沿x方向移动的滑架移动机构18(x方向扫描机构)。滑架移动机构18也称为“滑架移动体”。
67.垂直移动机构17包括螺旋旋转移动机构71和y方向电机72(垂直移动电机),螺旋旋转移动机构71与滑块16连接。通过旋转驱动垂直移动机构17的y方向电机72,经由螺旋旋转移动机构71,滑块16沿y方向垂直移动。
68.同样地,滑架移动机构18也包括螺旋旋转移动机构和x方向电机82(水平移动电机),通过旋转驱动x方向电机82,驱动滑架14沿x方向往复移动。
69.框架15的支承部51由连接器52连接,支承部51可沿基座10上的导向槽53在朝向或离开圆筒2(安装台11)的第三方向(z方向)移动(参照图3)。
70.该液体排出设备1还包括使框架15沿z方向往复移动的z方向移动机构19,该z方向移动机构19是使液体排出装置13沿朝向或离开安装台11的方向移动的可进退部。因此,该z方向移动机构19作为使液体排出装置13朝向或离开安装台11移动的“进退器”。
71.z方向移动机构19还包括螺旋旋转移动机构91和z方向电机92(进退电机),螺旋旋转移动机构91连接到框架15的连接器52。通过旋转驱动z方向移动机构19的z方向电机92,框架15经由螺旋旋转移动机构91沿z方向水平(横向)移动,从而滑架14沿z方向相对安装台11进退移动。
72.图4是液体排出设备1中控制器500的电路图。
73.控制装置500包括具有中央处理器501(cpu501)、只读存储器502(rom502)和随机存取存储器503(ram503的主控制装置500a。cpu501控制整个液体排出设备1,rom502存储包含使cpu501进行控制的程序和其它固定数据的程序,ram503临时存储打印数据等。
74.控制器500还包括主机接口506(i/f506),用于发送和接收来自主机520(外部装置)的用于接收打印数据的数据和信号,主机520包括诸如个人计算机的信息处理设备。
75.控制器500包括驱动构成液体排出装置13的头300的电机驱动器508。
76.控制器500包括驱动y方向电机72以沿y方向移动搭载头300的滑架14的电机驱动器510,和驱动x方向电机82以沿x方向移动滑架14的电机驱动器511。
77.控制器500包括驱动z方向电机92以通过框架15在z方向移动滑架14的电机驱动器512,控制器500包括驱动使安装台11旋转的安装台电机25的电机驱动器513。
78.控制器500包括清洁控制器514,以驱动和控制清洁机构200清洁头300,如下所述。
79.接着,说明通过液体排出设备1对圆筒2进行的打印动作(绘画动作)。
80.首先,参照图5和图6描述打印区域和打印数据。图5是表示打印区域和打印数据之间关系的液体排出设备1的示意图。图6是表示打印圆筒2的整个圆周时的分割打印区域的示例的圆筒2的平面图。
81.在本实施例中,圆筒2处于停止状态(在此是固定状态),此外,当头300在第一方向(y方向)移动时,头300向圆筒2排出液体以打印(绘制)圆筒2上的图像,当头300在第二方向(x方向)移动时,头300不向圆筒2排出液体。
82.当液体排出设备1打印在停止的圆筒2上时,液体排出设备1如图5所示沿x方向移动滑架14,改变头300的绘制位置。范围l是液体排出设备1在上述停止的圆筒2上打印时的
液体排出设备1的可打印范围,范围l小于圆筒2的圆周方向的圆筒2的圆周面的长度的一半。在打印时,滑架14的移动距离lx比圆筒2的直径d短。
83.此外,圆筒2的直径d根据圆筒2而变化,从头300到圆筒2的圆周面的距离根据圆筒2而变化,飞行液体的着陆精度受到从头300到圆筒2的圆周面的距离的影响。
84.因此,当液体排出设备1在圆筒2的圆周面上打印图像时,液体排出设备1在圆周方向设置多个分割打印区域,例如图6所示的三个分割打印区域la至lc。当液体排出设备1完成一个分割打印区域的打印时,液体排出设备1旋转安装台11,使得圆筒2的下一个分割打印区域面对打印头300,开始打印。
85.分割打印区域不需要具有相同的周向长度,优选在各个图之间,例如在y方向的任意位置上没有图像等的区域之间,用空白部分分割打印区域。
86.下面参照图7和图8说明控制器500的打印动作(绘制动作)的控制。图7是控制器500的绘制动作控制的流程图。图8a和图8b是说明在液体排出设备1的不同绘制(打印)动作期间打印头300的轨迹的圆筒2的侧视图。
87.首先,将圆筒2配置在安装台11上,通过固定部12固定圆筒2的顶部。
88.参照图7,旋转驱动x方向电机82、y方向电机72和z方向电机92,使滑架14沿x、y和z方向移动,将打印头300移动到预定的绘制开始位置(打印开始位置:写入开始位置)(步骤s1)。以下,步骤s1简称为“s1”。
89.在此,假设从圆筒2的上侧向下侧进行打印(描绘),在圆筒2的y方向的上侧位置设定打印头300的起始位置,液体排出设备1的控制器500使打印头300从起始位置移动到圆筒2的描绘起始位置。
90.然后,控制器500开始沿y方向向下移动头300(s2),开始从头300排出液体(s3),执行预定的绘图,停止沿y方向向下移动头300(s4)。
91.控制器判断绘制动作(打印动作)是否完成(s5)。
92.如果绘制没有完成,控制器500判断一个分割打印区域的绘制是否完成(s6)。
93.在步骤s6,如果一个分割打印区域的绘制没有完成,控制器500将打印头300沿x方向移动预定距离(例如3.2mm)(s7),此外,控制器500开始沿y方向向上移动打印头300(s8),控制器500在打印头300移动预定量时停止打印头300沿y方向向上移动(s9)。然后,绘制动作(打印动作)返回步骤s2,控制器500执行下一行(线)的绘制。
94.相反地,当一个分割打印区域的绘制动作(打印动作)完成时,控制器500将安装台11旋转到下一分割打印区域可打印的位置(s10)。然后,绘制动作返回到步骤s1,控制器500继续在绘制开始位置执行打印。
95.当绘图在步骤s5中结束时,液体排出设备1结束绘图动作。
96.如上所述,在本实施例中,如图8a中的轨迹“a”所示,当打印头300沿y方向的一个预定方向(一个方向)移动时,液体从打印头300排出以执行单向打印,当打印头300沿与一个预定方向(一个方向)相反的方向移动时,液体不从打印头300排出。
97.液体排出设备1进行这种单向打印以防止力对图像质量的影响,该力沿重力方向(y方向向下)施加到从打印头300排出的液体上。
98.相反地,如果液体排出设备1执行如图8b中的轨迹“b”所示的双向打印,则当打印头300沿y方向从圆筒2的顶部朝底部向下移动时,液体从打印头300排出,以在圆筒2的圆周
表面执行必要的打印,当打印头300沿y方向从圆筒2的顶部向底部扫描完成时,控制器500沿x方向移动打印头300预定距离,在圆筒2上执行打印,同时沿y方向从圆筒2的底部向顶部移动打印头300。
99.双向打印可以提高绘制动作(打印动作)的生产率。
100.如上所述,头300可以在第一方向(y方向)和第二方向(x方向)中的每一个方向上往复移动,第一方向(y方向)沿着载置在安装台11的圆筒2的高度方向(垂直方向),第二方向(x方向)在与第一方向(y方向)正交的面内,沿着圆筒2的圆周面的切线方向。
101.因此,液体排出装置1可以排出液体到圆筒2(柱状部件)的圆周面上,在圆筒2上打印(绘制)图像。于是,当例如旋转圆筒2(柱状部件)执行打印时,液体排出装置1能够以较高的图像质量在圆筒2上排出液体,而不会显著改变圆筒2(柱状部件)的圆周面与打印头300(液体排出装置)之间的距离。
102.另外,本发明的液体排出设备1使用固定部12将作为柱状部件的圆筒2的顶部固定。因此,液体排出设备1能够在固定载置在安装台11的圆筒2的姿势的状态下,在圆筒2上打印图像,因此,液体排出设备1能够稳定地在圆筒2上打印高质量图像。
103.在图1的实施例中,液体排出设备1不具有在旋转圆筒2的同时排出液体的结构,因此,如果圆筒2的姿势稳定,就不必固定圆筒2的顶部。保持圆筒2的姿态的装置不限于固定部12固定圆筒2的顶部,例如,如果圆筒2由磁力吸引材料制成,液体排出设备1可以包括安装台11上的电磁铁,或者,液体排出设备1可以包括安装台11上的吸引装置,以吸引圆筒2到安装台11上。
104.在此,将圆筒2作为由液体排出设备1印刷的柱状部件的例子进行说明,但液体排出设备1也可印刷在圆筒(储气瓶)以外的柱状部件或圆筒状部件以外的柱状部件上,例如棱柱状部件。
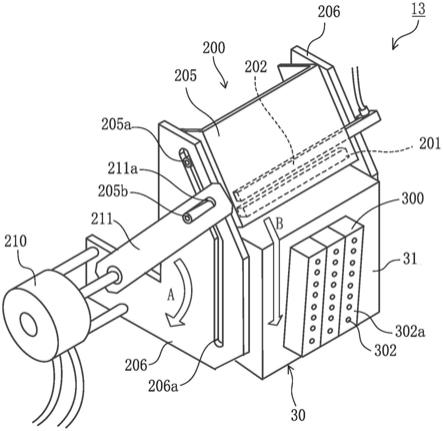
105.接着,参照图9至图11描述本公开的第一实施例。图9是液体排出设备的立体图,图10是液体排出设备的侧视图,图11是图9和图10的头300的正视图。
106.液体排出装置13具有排出液体的头部30(液体排出部),头部30具有作为一体的清洁机构200,清洁机构200具有擦拭作为排出面的喷嘴面302a的擦拭器201。
107.头部30包括保持多个(这里是三个)排出不同颜色液体的头300(300a~300c)的保持架31,在头300内配置多个喷出液体的喷嘴302,保持架31作为外壳保持头300,同时,喷嘴302的配置方向相对于y方向倾斜。
108.清洁机构200包括擦拭头300的喷嘴面302a的擦拭器201,和作为清洁液体施加器的清洁液体排出器202,以排出或滴落清洁液体220(稍后描述)到头300的喷嘴面302a。
109.液体排出设备1包括擦拭器移动器205,擦拭器201和清洁液体排出器202安装并保持在擦拭器移动器205上。
110.另外,液体排出装置13在头部30的保持架31的两侧安装分别具有导向槽206a的导向器206。在导向器206的导向槽206a内可移动地嵌合擦拭器移动器205的支承轴205a。保持架31是保持头300并可移动地支承擦拭器移动器205的壳体。
111.这样,擦拭器移动器205可以使擦拭器201沿着导向槽206a在擦拭器201面对头300的喷嘴面302a的面对位置和擦拭器201从喷嘴面302a退避(缩回)的待机(退避)位置之间移动。
112.液体排出装置包括旋转气缸210,驱动擦拭器移动器205移动。液体排出装置13包括臂211,其一端与旋转气缸210连接,另一端形成有长孔211a。擦拭器移动器205包括位于擦拭器移动器205侧表面的销205b。销205b可移动地安装在臂211中的长孔211a。驱动器可以安装在滑架14,驱动器从滑架14向液体排出装置13传递驱动力。
113.这样,驱动旋转气缸210以使臂211沿图9中箭头“a”所示方向旋转,擦拭器移动器205由导向器206的导向槽206a导向。于是,擦拭器移动器205如图9中箭头b所示从由图10中假想线表示的待机(退避)位置移动到同样由图10中实线表示的擦拭结束位置即对向位置。这样,擦拭器移动器205使得擦拭器201从待机(退避)位置移动到擦拭结束位置。于是,擦拭器移动器205使得擦拭器201移动,以使擦拭器201擦拭头300的喷嘴面302a。
114.如上所述,液体排出装置13包括作为排出液体的液体排出部的头部30和将头部30的头300的喷嘴面302a擦拭并清洁的清洁机构200,设为一体。另外,在将液体排出装置13安装在滑架14上的同时,滑架14往复移动。因此,滑架14将包括头300和擦拭器移动器205在内的清洁机构200支撑为一体。
115.因此,当液体排出装置13不排出液体时,无论液体排出装置13位于何处,液体排出装置13都可以擦拭并清洁头300的喷嘴面302a。因此,当需要时,液体排出装置13可以随时清洁头300的喷嘴面302a。
116.接着,参照图12描述清洁机构200的清洁液体供给系统和清洁动作。图12是清洁机构200的清洁液体供给系统的电路图。
117.液体排出设备1包括作为贮存清洗液220的清洗液贮存器的清洗液罐221。清洗液罐221通过包括空气调节器232的通道231连接到压缩机230,从压缩机230供给加压空气。
118.另外,清洗液罐221通过通道233与清洗液排出器202连接,通道233包括可开闭阀234。
119.此外,旋转气缸210通过包括空气调节器242的通道241连接到压缩机230,旋转气缸210从压缩机230供应压缩空气。通道241包括可开闭阀244。
120.当清洁机构200的擦拭器201擦拭头300的喷嘴面302a时,控制器500的清洁控制器514控制可开闭阀244的打开和关闭,以驱动旋转气缸210。如上所述,擦拭器移动器205将擦拭器201从待机(退避)位置移动到擦拭结束位置。
121.当擦拭器移动器205将擦拭器201移动到擦拭结束位置时,控制可开闭阀234以打开和关闭通道233。清洁液体220从清洁液体排出器202排出,必要时或持续地将清洁液体220施加到头300的喷嘴面302a,擦拭器201在用清洁液体润湿的同时擦拭喷嘴面302a。
122.控制器500控制擦拭动作时间,可以在头300不排出液体的任意时间进行,例如,当液体排出装置13(头300)返回到原位置时,以及当液体排出装置13沿x方向移动以进行单向打印时。
123.当液体排出设备1进行擦拭动作时,液体排出装置13沿z方向移动,以确保擦拭器移动器205能够进入头300和圆筒2之间的空间。
124.接着,参照图13描述根据本发明第一实施例的头300的示例。图13是头300的一个喷嘴部分的示意性横截面视图。图13的上部表示喷嘴302闭合的状态,图13的下部表示喷嘴302打开的状态。
125.头300包括中空的壳体304,该壳体304包括位于头300的前端以排出液体的喷嘴
302,注入口303靠近喷嘴302,液体从注入口303注入到壳体304内。
126.头300包括压电元件305、阀307和在壳体304中的阀移动器308。压电元件响应于外部施加的电压而膨胀和收缩,阀307打开和关闭喷嘴302,阀移动器308设置在阀307和压电元件305之间,阀移动器308使阀307朝向或离开喷嘴302移动。
127.压电元件305容纳在盒体315内,向压电元件305施加电压的一对配线部件310a、310b连接到压电元件305,引出到壳体304的外部。
128.在阀307和壳体304之间设置密封件306,以防止从注入口303注入的加压液体进入压电元件305,从而形成从注入口303注入加压液体的液室309。
129.壳体304是具有诸如圆筒形、方筒形的筒状体,除了喷嘴302和注入口303以外,呈封闭的封闭空间。喷嘴302是在壳体304的前端形成的开口部,液体311从喷嘴302排出。注入口303形成在壳体304靠近喷嘴302的侧面上,加压液体连续地供给注入口303。
130.用氧化锆陶瓷等形成压电元件305。通过配线部件310a、310b对压电元件305施加驱动波形(驱动电压)。
131.密封件306例如是密封圈、o型圈306等,外嵌在阀307的密封件306可防止液体从注入口303侧流入压电元件305侧。
132.阀移动器308包括由橡胶、软树脂、薄金属板等形成的可弹性变形的弹性部件形成的截面大致为梯形的可变形部308a。将与可变形部308a的截面大致为梯形的上侧对应的连接部308e固定在阀307的基端面上。将与可变形部308a的截面大致为梯形的下侧对应的长侧连接在弯曲侧308d上。弯曲侧308d具有与导向部308c连接的径向中央部,将径向中央部与弯曲侧308d的端部之间与一端连接到盒体315的固定部312连接。
133.当对压电元件305施加预定电压时,压电元件305膨胀,阀移动器308如图13的下部所示,导向部308c向喷嘴302移动例如距离“e”,因此,弯曲侧308d的中央附近被推入到阀移动器308中。
134.弯曲侧308d从导向部308c和固定部312之间的连接作为位移的起点,沿图13下部的箭头方向位移,导向部308c的外周侧与固定部312连接,当弯曲侧308d沿图13下部的箭头方向位移时,可变形部308a扩张,使与阀307连接的连接部308e沿图13下部的箭头方向(右手方向)拉入。
135.喷嘴302因阀移动器308的可变形部308a的变形而开启,固定在可变形部308a的连接部308e上的阀307缩回距离d。
136.这样,由于压电元件305的膨胀,导向部308c向喷嘴302移动距离“e”,使得阀307沿与导向部308c的移动方向(压电元件305的膨胀方向)相反的方向(右侧方向)移动。
137.调节连接部308e与弯曲侧308d之间的距离或弯曲侧308d的长度,使阀307的移动量比压电元件305的位移量长,连接部308e是阀移动器308的可变形部308a与阀307之间的连接。
138.这样,阀移动器308可以放大压电元件305的位移量,可以减小压电元件305的位移量,从而可以减小压电元件305的尺寸。
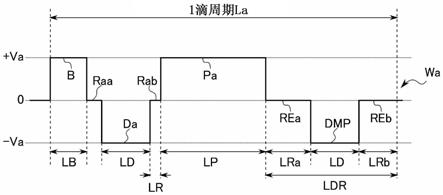
139.接着,参照图14描述头300的动作。图14是表示头300的动作的驱动电压的例子的波形图。
140.当对压电元件305没有施加电压时,压电元件305处于收缩状态,因此,压电元件
305不对阀移动器308施加力。此时,阀移动器308的可变形部308a处于如图13上部所示的扩张状态(通常状态),阀307通过可变形部308a的弹力被推向喷嘴302,因此,喷嘴302由阀307的端面关闭,液体311不从喷嘴302排出。
141.在此,如图14a所示,当向压电元件305施加具有波形p1的电压( ev)时,压电元件305膨胀,从而使阀移动器308的可变形部308a变形,沿如图13下部所示的箭头所示的方向拉入阀307。从而使阀307打开喷嘴302,从喷嘴302排出从注入口303注入的加压液体。
142.相反地,如图14b所示,具有波形p1和p2的电压( ev)可以施加到压电元件305上。如图14b所示,波形p2的后半部分在途中消失。此外,如图14c所示,由于电源故障等,具有施加到压电元件305上的波形的电压可以不施加到压电元件305上。
143.此时,压电元件305保持收缩状态,因此,阀移动器308的可变形部308a恢复到图13的上部所示的通常状态。因此,由于阀307保持喷嘴302闭合,液体311不会从喷嘴302排出。
144.因此,即使在停电等情况下,也可以防止液体311从喷嘴302意外泄漏或引起喷嘴堵塞。
145.接着,参照图15说明将液体供给到头300的液体供给系统。图15是液体供给系统的电路图。
146.液体排出设备1包括作为密封容器的液体罐330a~330c,液体罐330a~330c贮存有从头300a~300c排出的各种颜色的液体311,下文中,液体罐330a~330c统称为“液体罐300”。液体罐330和头300的注入口303(参照图13a和13b)分别通过管333连接。
147.液体罐330通过包括空气调节器332的管331连接到压缩机340,从压缩机340供给加压空气。
148.因此,各色的加压液体311分别供给头300的注入口303,因此,如上所述,各色的液体311分别根据阀307的开闭从头300的喷嘴302排出。
149.接着,参照图16的流程图,说明控制器500的清洁处理的例子。
150.当清洁动作开始时,控制器500开始将液体排出装置13沿z方向移动到退避位置(s21),完成液体排出装置13沿z方向移动到待机(退避)位置(s22)。因此,控制器500驱动z方向移动机构19(可收缩部),以便在执行用擦拭器201擦拭喷嘴面302a之前,沿离开圆筒2(柱状部件)的方向移动液体排出装置13。
151.清洁控制器514开始清洁动作(s23)。
152.然后,控制器500在完成清洁动作之后开始将液体排出装置13移动到绘制开始位置(s24)。然后,控制器500完成将液体排出装置13移动到绘制开始位置的移动(s25),结束清洁处理。
153.控制器500可以使液体排出装置13沿x、y和z方向移动,只要在清洁动作中擦拭器移动器205的移动不干扰圆筒2,就可以在液体排出装置13移动到待机(退避)位置期间,在清洁动作期间,以及在液体排出装置13返回绘制位置期间,与擦拭器移动器205的移动并行进行。
154.接着,参照图17描述由清洁控制器514控制清洁动作的示例。
155.当清洁动作开始时,清洁控制器514开始将清洁液体220从清洁液体排出器202施加到头300的喷嘴面302a(s31)。然后,擦拭器移动器205将擦拭器201从由图10中的假想线表示的待机(退避)位置移动到擦拭位置,以使擦拭器201与头300的喷嘴面302a接触(s32)。
156.因此,在擦拭器201接触头300的喷嘴面302a之前,清洁液体排出器202(清洁液体赋予器)将清洁液体220赋予(排出或滴落)到头300的喷嘴面302a。
157.然后,擦拭器移动器205将擦拭器201从擦拭位置(喷嘴面302a的上端)移动到擦拭位置(喷嘴面302a的下端),擦拭器201擦拭头300的喷嘴面302a(s33)。
158.接着,擦拭器移动器205将擦拭器201从擦拭位置(喷嘴面302a的下端)移动到擦拭位置(喷嘴面302a的上端),擦拭器201擦拭头300的喷嘴面302a(s34)。
159.然后,清洗液排出器202结束清洗液体220向头300的喷嘴面302a的赋予(s35),然后,擦拭器移动器205从擦拭位置移动到待机(退避)位置(s26),结束清洗动作。
160.因此,在擦拭器201返回到待机(退避)位置之前,清洁液体排出器202(清洁液体赋予器)结束清洁液体220向喷嘴面302a的施加(排出或滴落)。
161.清洗液体排出器202(清洗液体赋予器)可以从清洁液体220的赋予开始(s31)到清洁液体220的赋予结束(s35)连续地或间歇地将清洁液体220赋予到喷嘴面302a。
162.参照图18描述本发明的第二实施例,图18是根据本发明第二实施例的液体排出装置13的立体图。
163.本发明的液体排出装置13使用包括排列有多个喷嘴302的多个(这里是6个)喷嘴列302y的头300。
164.清洁机构200包括清洁液体接收器261,接收进行擦拭动作时从喷嘴面302a落下的过量清洁液体220。废液管262连接到清洁液体接收器261,由清洁液体接收器261回收的清洁液体220排出到废液罐240等。
165.在上述各实施例中,擦拭器移动器205可移动地保持液体排出装置13的擦拭器201和清洁液体排出器202(清洁液体赋予器),使得擦拭器201和清洁液体排出器202作为单个单元一起移动。但是,本发明不限于上述实施例。
166.例如,液体排出装置可以包括位于原位的清洁液体赋予器,以将清洁液体220赋予到头300的喷嘴面302a上,当清洁液体220赋予到喷嘴面302a上以执行擦拭时,液体排出装置13可以返回原位,其他单元可以只执行擦拭动作而不赋予清洁液体。
167.在上述第二实施例中,清洁液体接收器261设置在液体排出装置13一侧,相反地,清洁液体接收器261如槽部可设置在液体排出装置1的装置主体一侧,仅仅当赋予清洁液体220时移动到配置清洁液体接收器261(槽部)的位置,赋予清洁液体220。由此,滑架14不必伴随清洁液体接收器261一起移动,因此,根据第二实施例的液体排出设备1可防止整个滑架14重量的增加。
168.本发明的第三实施例参照图19和图20描述。图19是根据第三实施例的液体排出设备1的示意图,液体排出设备1在飞行器上打印作为要打印的对象的图像,图20是根据第三实施例的液体排出设备1的放大图。
169.液体排出设备1包括直线导轨404和多关节机器人405,直线导轨404引导安装液体排出装置13的滑架14沿直线导轨404往复移动,多关节机器人405将直线导轨404合适地移动到预定位置,将直线导轨404保持在预定位置。
170.多关节机器人405包括机器人臂405a,该机器人臂405a能够自由地移动机器人臂405a的前端,将机器人臂405a的前端配置在正确的位置。
171.例如,具有6轴(6关节)的6轴控制型工业机器人可以用作多关节机器人405。根据
该6轴控制型多关节机器人405,可以事先教导与多关节机器人405的动作相关的信息,使直线导轨404正确且迅速地朝向打印对象物702(飞机)的规定位置。多关节机器人405的轴数不限于6个,可以使用具有5轴或7轴等适当轴数的多关节机器人。
172.液体排出设备1包括分叉成两部分的叉形支承件424,设置在多关节机器人405的机器人臂405a,液体排出设备1还包括连接在支承件424的左支路424a的前端的垂直直线导轨423a和连接在支承件424的右支路424b的前端的垂直直线导轨423b,垂直直线导轨423a和垂直直线导轨423b互相平行。
173.此外,可移动地保持液体排出装置13的直线导轨404的两端由垂直直线导轨423a和423b支撑,以跨越两个垂直直线导轨423a和423b。
174.液体排出装置13包括例如多个排出分别为黑色、青色、品红色、黄色和白色的液体的头300,或具有多个排出分别为各色液体的喷嘴列的头300,各颜色的液体以与上述图28所示的液体供给系统相同的方式分别从液体罐330向液体排出装置13的头300或头300的喷嘴列供给。
175.在液体排出设备1中,多关节机器人405将直线导轨404移动到直线导轨404面对打印对象物702的所需打印区域的相对位置,在驱动打印头300以在打印对象物702上打印图像的同时,根据打印数据沿着直线导轨404移动液体排出装置13。
176.当液体排出设备1结束一线份的打印时,液体排出设备1驱动多关节机器人405的垂直直线导轨423a和423b,以使液体排出装置13的头300从一线移动到下一线。
177.液体排出设备1重复上述动作,在打印对象物702的希望的印刷区域上印刷图像。
178.在打印动作期间,包括擦拭器201的液体排出装置13可以在任何时间用擦拭器201清洁头300的喷嘴面302a,尽管液体排出装置13(头300)的移动距离增加。
179.因此,液体排出设备1能够以少的停机时间连续地打印高质量的图像。
180.参照图21和图22描述本发明的第四实施例。图21是根据第四实施例的液体排出设备1的立体图。图22是根据图21的液体排出设备1的驱动器的立体图。
181.液体排出设备1包括可动框架802,该可动框架802安装成面对具有诸如车辆发动机罩的曲面的印刷对象物702。框架802包括左框架810、右框架811,以及可动部813。该可动部813连接到左框架810和右框架811上,从而可动部813桥接在左框架810和右框架811之间。可动部813可沿y方向垂直移动。
182.可动部813包括具有内置电机的驱动器803和安装在驱动器803的液体排出装置13。驱动器803可在可动部813上沿水平方向(x方向或横向方向)往复移动,液体排出装置13向印刷对象物702排出液体。
183.另外,液体排出设备1具有控制装置805和信息处理装置806。控制装置805控制从液体排出装置13排出的液体、驱动器803的往复移动和可动部813的上下移动,个人计算机(pc)等的信息处理装置806向控制装置805发送指令,信息处理装置806连接到数据库807(db),该数据库(db)记录并存储关于印刷对象物702的形状、大小等的信息。
184.框架802除左框架810和右框架811之外,还包括上框架808和下框架809,构成框架802的垂直和水平轮廓。上框架808、下框架809、左框架810和右框架811由金属管等形成。框架802还包括连接到下框架809的两端以使框架802自立的左腿812a和右腿812b。左腿812a和右腿812b垂直和水平地连接到下框架809的两端。
185.桥接在左框架810和右框架811之间的可移动部813可在支撑驱动器803的同时垂直移动。
186.印刷对象物702的表面垂直于液体排出方向(z方向),因此,印刷对象物702的表面面对由框架802的上框架808、下框架809、左框架810和右框架811形成的平面。
187.在这种情况下,为了将印刷对象物702配置在进行印刷的规定的印刷位置,例如,将印刷对象物702的印刷区域的背面用与安装在多关节臂机器人的臂的前端的卡盘吸持,多关节臂机器人用于将印刷对象物702准确地配置在印刷位置,合适地改变印刷对象物702的姿势。
188.如图22所示,驱动器803沿作为导轨的可动部813在水平方向(x方向或横向)往复移动。可动部813包括导轨830、齿条831、直线导轨832、小齿轮833、电机834和旋转编码器835。导轨830水平配置成桥接在框架802的左框架810和右框架811之间。齿条831平行于导轨830。直线导轨832安装在导轨830的局部,沿导轨830滑动。小齿轮833连接到直线导轨832,与齿条831啮合。电机834包括减速器836,驱动小齿轮833旋转。旋转编码器835检测打印点的位置。
189.电机834正向驱动或反向驱动,使液体排出装置13沿可动部813左右移动,驱动器803在x方向上作为液体排出装置13的驱动机构发挥作用,减速器836包括安装在减速器836的壳体两侧的限位开关837a、837b。
190.液体排出装置13包括例如多个头300,以排出分别为黑色、青色、品红色、黄色和白色的液体,或包括多个喷嘴列的头300,以与上述图28所示的液体供给系统相同的方式,分别在压力下从液体罐330供给液体排出装置13的头300或头300的喷嘴列。
191.液体排出设备1使可动部813沿y方向移动,使液体排出装置13沿x方向移动,在印刷对象物702上印刷所希望的图像。
192.在打印动作期间,包括擦拭器201的液体排出装置13可以在任何时间用擦拭器201清洁头300的喷嘴面302a,尽管液体排出装置13(头300)的移动距离增加。
193.因此,液体排出设备1能够以少的停机时间连续地打印高质量的图像。
194.根据本发明的第五实施例,图23a和图23b说明液体排出设备1000。
195.图23a是根据本发明第五实施例的液体排出设备1000的右侧视图。图23b是液体排出设备1000的平面图。
196.该液体排出设备1000包括面对作为待打印对象的实例的绘制对象100的滑架601。该滑架601安装将作为液体的实例的墨水排出到绘制对象100的头300(参照图24)。滑架601是向绘制对象100排出液体的液体排出装置的实例。
197.液体排出设备1000包括z轴导轨103、x轴导轨101和y轴导轨102。z轴导轨103在z轴方向可移动地保持滑架601。x轴导轨101在x轴方向可移动地保持z轴导轨103。y轴导轨102在y轴方向可移动地保持x轴导轨101。x轴导轨101、y轴导轨102和z轴导轨103是可移动地保持滑架601的导向器的例子。
198.此外,液体排出设备1000包括z方向驱动器692、x方向驱动器672和y方向驱动器682。z方向驱动器692沿z轴导轨103在z轴方向移动滑架601。x方向驱动器672沿x轴导轨101在x轴方向移动z轴导轨103。y方向驱动器682沿y轴导轨102在y轴方向移动x轴导轨101。
199.这样,液体排出设备1000可以一边使滑架601沿x轴方向、y轴方向和z轴方向移动
一边将墨水排出到绘制对象100上。虽然绘制对象100在图23a和图23b中具有平板形状,但只要绘制对象100的表面例如汽车、卡车或飞机等车辆的车身那样,是接近垂直的面或曲率半径大的面,即使曲面也可。
200.图24是根据本实施例的滑架601的正视图。图25是根据本实施例的图24的滑架601的示意性平面图。图26是根据本实施例的图24的滑架601的示意性侧视图。
201.滑架601包括分别排出y、m、c和k颜色的墨水的头300y、300m、300c和300k,下文中,头300y、300m、300c和300k统称为“头300”。各头300包括具有多个喷嘴302的喷嘴面302a。
202.滑架601包括固定头300y、300m、300c和300k的头固定板607,使得喷嘴面302a与水平面相交,多个喷嘴302沿相对于x轴方向倾斜的方向排列(参照图24)。因此,喷嘴302朝与重力方向相交的方向排出墨水。
203.具体地说,头300y、300m、300c和300k配置成喷嘴面302a与水平面正交。因此,头300y、300m、300c和300k的喷嘴302朝水平方向排出墨水。
204.滑架601还包括擦拭器单元604,其包括墨水接收面624、擦拭器603、清洁液体供给器605和清洁液体回收器606。
205.墨水接收面624是接收从喷嘴302排出的墨水的液体接收面的实例。
206.擦拭器603是当擦拭器单元604移动时接触喷嘴302和喷嘴面302a,同时墨水接收面624面对喷嘴302(喷嘴面302a)的接触部的实例,擦拭器603在平行于喷嘴面302a的方向延伸。擦拭器603也是从墨水接收面624向喷嘴302突出的突起的实例,在墨水接收面624面对喷嘴302(喷嘴面302a)的状态下沿平行于墨水接收面624的方向延伸。
207.清洁液体220经由作为软管的清洁液体供给管611(参照图31a)供给清洁液体供给器605。清洁液体供给器605从上方将清洁液体220供给擦拭器603和墨水接收面624(参照图31a)。清洁液体回收器606是保持由墨水接收面624接收的墨水的液体保持器的例子。清洁液体回收器606设置在墨水接收面624的下方。清洁液体回收器606也是保持供给擦拭器603和墨水接收面624的清洁液体的清洁液体保持器的例子。于是,清洁液体回收器606经由作为软管的清洁液体回收管612排出墨水和清洁液体220。
208.滑架601包括上部导向板608h、下部导向板608l、上部板604h和下部板604l。上部导向板608h固定到头固定板607的上部。下部导向板608l固定到头固定板607的下部。上部板604h固定到擦拭器单元604的上部。下部板604l固定到擦拭器单元604的下部。头固定板607、上部导向板608h和下部导向板608l是保持头300的喷嘴302并可移动地支撑擦拭器单元604的壳体的例子。
209.导向槽609形成在上部导向板608h,导向槽609也形成在下部导向板608l。上部板604h和下部板604l包括分别向上部导向板608h和下部导向板608l突出的销610。
210.另外,滑架601包括电机613、辊613a、带614a、辊616a、旋转轴616、辊616b、带614b、辊615b和618b、以及上部安装部604b。辊613a与电机613同轴旋转。带614a卷绕在辊613a上。带614a卷绕在辊616a上。旋转轴616同轴支撑辊616a。辊616b由旋转轴616同轴支撑。带614b卷绕在辊616b上。带614b卷绕在辊615b和辊618b上。上部安装部604b连接擦拭器单元604的上部板604h和带614b。
211.滑架601包括辊616c、带614c、辊615c和辊618c、以及下部安装部604c。辊616c同轴地支承在旋转轴616上。带614c卷绕在辊616c上。带614c卷绕在辊615c和辊618c上。下部安
装部604c连接擦拭器单元604的下部板604l和带614c。
212.滑架601包括传感器617a和617b。传感器617a检测上部安装部604b在右端侧(x轴方向的负侧)的位置。传感器617b检测下部安装部604c在左端侧(x轴方向的正侧)的位置。传感器617a检测擦拭器单元604处于待机位置(原位置)。传感器617b检测擦拭器单元604处于移动结束位置(返回位置)。
213.具有上述结构的滑架601驱动电机613,通过带614a将电机613的旋转驱动力传递到带614b和带614c,与带614b和带614c连接的擦拭器单元604移动。此时,销610在导向槽609的内侧滑动,沿着导向槽609移动,从而擦拭器单元604以沿着导向槽609形状的轨迹移动。
214.如图24所示,当擦拭单元604沿左右方向(x轴方向)移动时,擦拭单元604沿水平(横向)方向移动(不改变y轴方向的位置),因此,擦拭单元604的姿势不发生变化。于是,擦拭单元604沿左右方向(x轴方向)移动,从而擦拭单元604相对于水平面的倾斜度不发生变化,擦拭单元604的高度也不发生变化。在此,清洁液体回收器606相对于擦拭单元604的位置固定。换言之,清洁液体回收器606固定于擦拭单元604。于是,擦拭单元604沿左右方向(x轴方向)移动期间,清洁液体回收器606相对于水平面的倾斜度不发生变化。此外,擦拭单元604沿左右方向(x轴方向)移动期间,清洁液体回收器606的高度不发生变化。
215.然后,如图25所示,当擦拭器单元604从右侧移动到左侧(x轴方向的正侧)时,导向槽609形成为使得擦拭器单元604从里侧移动到前侧(z轴方向的正侧)。
216.在待机位置(图24和图25的右侧),擦拭器单元604比喷嘴302更靠近里侧(z轴方向的负侧),不面对喷嘴302。
217.然后,当擦拭器单元604移动到左侧(x轴方向的正侧),擦拭器单元604移动到喷嘴302(喷嘴面302a)的前侧(z轴方向的正侧),并且进一步移动到左侧(x轴方向的正侧),面对喷嘴302(面对位置)。在这种状态下,擦拭器单元604面对喷嘴302(喷嘴面302a),擦拭器603可以接触喷嘴面302a,墨水接收面624可以接收从喷嘴302排出的墨水。擦拭器单元604在面对喷嘴302的同时移动到左侧(x轴方向的正侧),从而擦拭器603擦拭清洁喷嘴面302a和头300的喷嘴302。
218.另外,当擦拭器单元604向左(x轴方向的正侧)移动时,擦拭器单元604不面对喷嘴302。
219.然后,当擦拭器单元604移动到移动结束位置时,擦拭器单元604向右移动(x轴方向的负侧)并返回到待机位置。
220.因此,擦拭器单元604是擦拭器移动器的例子,其能使得擦拭器603和墨水接收面624在擦拭器603和墨水接收面624面对喷嘴302的面对位置和擦拭器603和墨水接收面624不面对喷嘴302的待机位置(原位置)之间移动。此外,擦拭器单元604可移动,使得擦拭器603可以在擦拭器603面对喷嘴面302a的面对位置水平(横向)移动。
221.如上所述,滑架601包括:从喷嘴302向绘制对象100排出墨水的头300、接收从喷嘴302排出的墨水的墨水接收面624、保持由墨水接收面624接收的墨水的清洁液体回收器606、以及擦拭器单元604。所述擦拭器单元604可在墨水接收面624面向喷嘴302的面对位置和墨水接收面624不面向喷嘴302的待机位置(原位置)之间移动,同时保持(维持)清洁液体回收器606相对于水平面的倾斜度不变。换句话说,擦拭器单元604不改变清洁液体回收器
606相对于水平面的倾斜度,同时,擦拭器单元604在墨水接收面624面对喷嘴302的面对位置和墨水接收面624不面对喷嘴302的待机位置之间移动。
222.因此,滑架601将墨水接收面624移动到墨水接收面624面对喷嘴302的面对位置,从而滑架601上的头300可以将墨水从喷嘴302排出到墨水接收面624,而不将头300的喷嘴302移动到墨水接收面624。此外,当墨水接收面624移动到墨水接收面624不面对喷嘴302的待机位置时,可以减少墨水接收面624所接收的墨水摇晃而从清洁液体回收器606中溢出的可能性。
223.另外,液体排出设备1000包括滑架601、以及如图23所示可移动地保持滑架601的x轴导轨101、y轴导轨102和z轴导轨103。
224.因此,滑架601可以在沿x轴、y轴和z轴方向移动的同时向着绘制对象100排出墨水。与滑架601及绘制对象100的位置无关,滑架601在必要时将墨水接收面624移动到面向喷嘴302的面对位置,以使头300能够从喷嘴302向墨水接收面624排出墨水,而不使头300的喷嘴302移动到墨水接收面624。换句话说,与滑架601在液体排出设备1000中的位置无关,头300能够从喷嘴302向着墨水接收面624排出墨水,而不使滑架601移动到墨水接收面624。
225.因此,液体排出装置1000能够以较少的停机时间连续地绘制高质量的图像,因为与滑架601向位置固定的墨水接收面624移动的配置相比,液体排出装置1000能够减少滑架601向墨水接收面624移动所需的时间。
226.擦拭器单元604可移动而不改变清洁液体回收器606的高度。于是,当擦拭器单元604移动时,由清洁液体回收器606保持的清洁液体220在高度方向(重力方向)不受到力。因此,由清洁液体回收器606保持的清洁液体220较少可能摇晃而从清洁液体回收器606溢出。
227.头300沿与重力方向交叉的方向从喷嘴302喷出墨水,清洁液体回收器606位于墨水接收面624的下方。从而清洁液体回收器606能够保持从头300的喷嘴302向墨水接收面624喷出的墨水,因重力使其下落到清洁液体回收器606。
228.清洁液体回收器606保持供给墨水接收面624的清洁液体220。因此,当墨水接收面624移动到不面对喷嘴302的待机位置时,擦拭器单元604可以清洁墨水接收面624,还可以防止由墨水接收面624接收的清洁液体220从清洁液体回收器606溢出。
229.擦拭器单元604包括清洁液体供给器605,其将清洁液体220供给到墨水接收面624。因此,擦拭器单元604可以可靠地将清洁液体220供给到墨水接收面624,可靠地清洁墨水接收面624。
230.因此,滑架601包括向绘制对象100排出墨水的喷嘴302的喷嘴面302a、与喷嘴面302a接触的擦拭器603、保持供给擦拭器603的清洁液体220的清洁液体回收器606、以及保持擦拭器603和清洁液体回收器606的擦拭器单元604。擦拭器单元604可在擦拭器603面对喷嘴面302a的面对位置和擦拭器603不面对喷嘴面302a的待机位置之间移动,而不改变清洁液体回收器606相对于水平面的倾斜度。换句话说,擦拭器单元604在面对位置和待机位置之间移动期间,保持清洁液体回收器606与水平面的恒定倾斜度。此外,在擦拭器单元604面对头300的喷嘴面302a的区域移动期间,擦拭器单元604保持清洁液体回收器606与水平面的恒定倾斜度。
231.擦拭器603最好沿平行于喷嘴面302a的方向延伸。
232.擦拭器603移动到擦拭器603面对喷嘴面302a的面对位置,使得供给有清洁液体
220的擦拭器603可以接触喷嘴面302a,擦拭和清洁喷嘴面302a,而不移动头300的喷嘴面302a到擦拭器603。
233.换句话说,无论滑架601在液体排出设备1000中的位置如何,擦拭器603都可以接触喷嘴面302a,擦拭和清洁喷嘴面302a,而不将滑架601移动到擦拭器603。
234.另外,当擦拭器603移动到擦拭器603不面对喷嘴面302a的待机位置时,滑架601可以减小清洁液体回收器606中的清洁液体220摇晃而从清洁液体回收器606溢出的可能性。
235.另外,液体排出设备1000包括滑架601、以及如图23所示可移动地保持滑架601的x轴导轨101、y轴导轨102和z轴导轨103。
236.因此,滑架601可以在沿x轴、y轴和z轴方向移动的同时向着绘制对象100排出墨水。与滑架601在液体排出设备1000中的位置无关,滑架601在必要时将擦拭器603移动到擦拭器603面对喷嘴面302a的面对位置。因此,供给有清洁液体220的擦拭器603能够接触头300的喷嘴面302a,擦拭和清洁喷嘴面302a,而不移动喷嘴面302a(滑架601)到擦拭器603。
237.因此,液体排出装置1000能够以较少的停机时间连续地绘制高质量图像,因为与滑架601向位置固定的擦拭器603移动的配置相比,液体排出装置1000能够减少滑架601向擦拭器603移动所需的时间。
238.擦拭器单元604可移动而不改变清洁液体回收器606的高度。于是,当擦拭器单元604移动时,由清洁液体回收器606保持的清洁液体220在高度方向(重力方向)不受到力。因此,由清洁液体回收器606保持的清洁液体220较少可能摇晃而从清洁液体回收器606溢出。
239.擦拭器单元604可移动而不改变清洁液体回收器606的高度。于是,当擦拭器单元604移动时,由清洁液体回收器606保持的清洁液体220在高度方向(重力方向)不受到力。因此,由清洁液体回收器606保持的清洁液体220较少可能摇晃而从清洁液体回收器606溢出。
240.擦拭器单元604可移动,而不改变清洁液体回收器606在擦拭器603面对头300的喷嘴面302a的面对区域中的高度。另外,擦拭器单元604在面对区域中可水平地(横向地)移动。另外,擦拭器单元604在面对区域中可水平地(横向地)移动。面对区域例如是图25中导向槽609的水平部分。更具体地说,面对区域是如图24和图25中所示的擦拭器603面对喷嘴面302a的区域。因此,当擦拭器单元604移动时,由清洁液体回收器606所保持的清洁液体220在高度方向(重力方向)不受力。因此,清洁液体回收器606所保持的清洁液体220较少可能摇晃而从清洁液体回收器606溢出。
241.此外,擦拭器604在擦拭器603面对喷嘴面302a的面对位置和擦拭器603不面对喷嘴面302a的待机位置之间移动期间保持清洁液体回收器606与水平面的恒定倾斜度。
242.擦拭器单元604可以在擦拭器603面对喷嘴面302a的面对位置和擦拭器603不面对喷嘴面302a的待机位置之间移动期间保持清洁液体回收器606水平。
243.因此,当擦拭器603移动到面对位置时,对其供给清洁液体的擦拭器603可以接触、擦拭和清洁喷嘴面302a,而不将喷嘴面302a(滑架601)移动到擦拭器603。因此,由清洁液体回收器606保持的清洁液体220在擦拭器603移动到喷嘴面302a期间较少可能摇晃而从清洁液体回收器606溢出。
244.滑架601包括保持喷嘴面302a并可移动地支撑擦拭器单元604的头固定板607,以及导向板608h和608l(壳体的一个例子)。
245.擦拭器单元604包括向擦拭器603供给清洁液体220的清洁液体供给器605。因此,
清洁液体供给器605可靠地将清洁液体220供给到擦拭器603,从而擦拭器603可靠地擦拭和清洁喷嘴面302a。
246.喷嘴面302a配置在与水平面交叉的方向,擦拭器603向下方延伸,清洁液体供给器605从擦拭器603的上方供给清洁液体220。于是,清洁液体供给器605可靠地向擦拭器603的下部供给清洁液体220,从而擦拭器603可靠地擦拭和清洗喷嘴面302a的下部。
247.图27是说明本发明实施例中的控制系统的电路图。液体排出设备1000包括供给加压空气的压缩机230和空气调节器332,以及存储墨水(液体311)的液体罐330。因此,液体排出设备1000可以将来自压缩机230和空气调节器332的加压空气供给液体罐330。在此,压缩机230是加压空气供给器的例子,液体罐330是液体保持器的例子。
248.此外,液体排出设备1000包括连接到压缩机230的空气调节器232、存储清洁液体220的清洁液体罐221、以及位于清洁液体罐221和清洁液体供给器605之间的可开闭阀234。因此,液体排出设备1000可以将来自压缩机230和空气调节器232的加压空气供给到清洁液体罐221。
249.此外,液体排出设备1000包括真空发生器242、电磁阀245和废液罐240。电磁阀245连接到压缩机230和真空发生器242的压力端口。废液罐240连接到真空发生器242的排出端口。清洁液体回收管612连接到真空发生器242的吸入端口。真空发生器242是负压发生器的例子,废液罐240是清洁液体回收器的例子。
250.液体排出设备1000包括控制器500,该控制器基于如图24至图26所示的来自传感器617a和617b的检测信号控制电机613。此外,控制器500控制如图23a和图23b中所示的x方向驱动器672、y方向驱动器682和z方向驱动器692。控制器500还控制头300、可开闭阀234和电磁阀245。
251.控制器500例如包括控制整个液体排出设备1000的中央处理单元cpu、只读存储器rom、随机存取存储器ram和接口i/f的电路。cpu501控制整个液体排出设备1000。rom存储包括使cpu执行诸如绘制动作等的控制程序和其它固定数据的程序。ram临时存储绘制数据等。i/f发送和接收当控制器500从诸如个人计算机pc的主机接收绘制数据等时使用的数据和信号。
252.在上述结构中,控制器500控制头300,从而将加压墨水从液体罐330供给到头300。
253.当控制器500打开可开闭阀234时,加压的清洁液体220从清洁液体罐221供给到清洁液体供给器605。
254.当控制器500打开电磁阀245,压缩机230向真空发生器242发送加压空气时,在真空发生器242的吸入端口产生负压。清洁液体回收器606中的液体被抽吸通过清洁液体回收管612,排出到废液罐240中。
255.如上所述,液体排出设备1000包括通过清洁液体回收管612连接到清洁液体回收器606的废液罐240。因此,不管滑架601相对绘制对象100的位置,清洁液体回收器606保持的清洁液体都可以由废液罐240回收。
256.液体排出设备1000包括在清洁液体回收管612和废液罐240之间产生负压的真空发生器242。因此,由清洁液体回收器606保持的清洁液体220可以由废液罐240可靠地回收。
257.液体排出设备1000包括供给加压空气的压缩机230,以及接收从压缩机230供给的加压空气并向喷嘴302供给加压墨水的液体罐330。真空发生器242利用从压缩机230供给的
加压空气产生负压。因此,使用向头300供给墨水的压缩机230,由清洁液体回收器606保持的清洁液体220可以由废液罐240可靠地回收。图28是表示本发明实施例中的液体供给系统的电路图。
258.接着,参照图28说明将液体供给头300的液体供给系统。图28是液体排出设备1000中的液体供给系统的电路图。
259.液体排出装置1000包括作为密封容器的液体罐330(330y、330m、330c和330k),这些密封容器分别存储从各头300(300y、300m、300c和300k)排出的各种颜色的墨水311。在此,液体罐330y、330m、330c和330k统称为液体罐330。液体罐330和头300的喷射口303分别通过管333连接。
260.另外,液体罐330通过包括空气调节器332的管331连接到压缩机230,从而将加压空气从压缩机230供给到液体罐330。
261.因此,各颜色的加压墨水311分别供给头300的喷射口303。于是,如上所述,各颜色的墨水311分别根据阀307的开闭而从头300的喷嘴302排出。
262.图29是表示本实施例中的绘制动作的控制的流程图。图30a和图30b表示滑架601在本实施例中的移动轨迹,图30a是绘制对象100的正视图和滑架601的移动轨迹,图30b是绘制对象100和x轴轨道101的侧视图。滑架601的移动轨迹在图30b中用601r表示。
263.当控制器500接收到绘制命令时,控制器500控制如图23a和图23b中所示的x方向驱动器672、y方向驱动器682和z方向驱动器692,以将滑架601移动到绘制开始待机位置110(ps1)。
264.绘制开始待机位置110(图30a的左端)是在
‑
x轴方向离开绘制对象100的绘制区域(图30a的中央区域)一定距离的位置,并且是在 z轴方向(参照图30b)离开绘制对象100的绘制面的位置。如图30b所示,在 z轴方向,绘制开始待机位置110离绘制对象100的绘制面的距离大于在绘制动作期间面对绘制对象100的x轴轨道101的区域(图30b的中央区域)离绘制对象100的绘制面的距离。
265.控制器500在绘制开始待机位置110执行维护动作(ps2)。维护动作具体如下所述。
266.然后,控制器500控制x方向驱动器672和z方向驱动器692,使滑架601沿 x轴方向移动,同时使滑架601接近图30b所示的绘制对象的绘制面,执行基于图像信息的描绘动作(ps3)。于是,控制器500一边使得滑架500扫描,一边执行描绘动作(ps3)。
267.当滑架601移出绘制区域时,控制器500控制x方向驱动器672和z方向驱动器692,一边使得滑架601朝离开绘制面的方向(
‑
z轴方向)移动,同时朝 x轴方向移动,在反转位置111使其停止(参照图30b)。
268.控制器500判断绘制动作是否完成(ps4)。如果存在剩余的绘制数据,则控制器500控制y方向驱动器682使得滑架601在
‑
y轴方向移动(ps5)。然后,控制器500再次执行从ps2到ps4的动作。于是,控制器500使得滑架601在y轴方向扫描,直到绘制动作完成。
269.控制器500继续从ps2到ps5的动作直至绘制结束(完成)。在控制器500判断绘制动作已完成(ps4的“是”)之后,控制器500执行与步骤ps2相同的维护动作(ps6),并结束绘制动作。于是,控制器500可以在从喷嘴面302a去除异物、残留墨水等的状态下结束绘制动作。
270.图31a和图31b说明在本实施例中的擦拭器单元604。图32a和图32b是图31a和图31b的擦拭器单元604的局部放大图。
271.图31a是擦拭器单元604的后视图。图31b是擦拭器单元604的侧视图。图32a是擦拭器单元604的一部分的放大的上部正视图。图32b是擦拭器单元604的一部分的放大的下部正视图。图32c是擦拭器单元604的一部分的放大的下部后视立体图。
272.擦拭器单元604包括凸部623和加压机构603p。凸部623从墨水接收面624向喷嘴面302a侧突出(在墨水接收面624的法线方向),并且沿平行于墨水接收面624的方向延伸,沿垂直方向向下延伸。加压机构603p从擦拭器603的后侧对擦拭器603加压,如图32c中箭头所示。擦拭器603和凸部623是在墨水接收面624面对喷嘴302的状态下从墨水接收面624向喷嘴302突出的突起的例子。
273.另外,墨水接收面624在水平(横向)方向位于擦拭器603和凸部623之间。擦拭器603和凸部623两者在垂直方向向下延伸。即,擦拭器603和凸部两者的纵向沿着垂直方向。如图24至图26所示,擦拭器单元604在水平方向(x轴方向或横向方向)移动。墨水接收面624在擦拭器单元604的移动方向(在水平(横向)方向)设置在擦拭器603和凸部623之间。上述实施例是沿垂直于擦拭器单元604的移动方向的方向延伸的第一突起和第二突起的例子。
274.擦拭器603将与头300的喷嘴面302a对向侧的面作为最高点,设为四边倾斜的形状。
275.清洁液体供给器605位于擦拭器603和墨水接收面624的上方。清洁液体供给器605包括擦拭器侧供给口621和接收侧供给口622。擦拭器侧供给口621从擦拭器603的上方供给清洁液体220。接收侧供给口622从墨水接收面624的上方供给清洁液体220。清洁液体回收器606位于擦拭器603和墨水接收面624的下方。清洁液体回收器606具有围住擦拭器单元604的底面上方空间的壁面606w。由壁面606w围住的开口606a形成在清洁液体回收器606的上部。
276.如上所述,擦拭器单元604包括凸部623和擦拭器603,它们从墨接收面624向喷嘴302侧突出,在墨接收面624面对喷嘴302的状态下沿平行于墨接收面624的方向延伸。因此,擦拭器单元604可以减少墨接收面624接收的墨水朝墨水接收面624周围飞散。
277.此外,擦拭器单元604包括凸部623(第一突起)、擦拭器603(第二突起)、以及设置在凸部623(第一突起)和擦拭器603(第二突起)之间的沿擦拭器单元604的移动方向(水平方向)的墨接收面624。第一突起(凸部623)和第二突起(擦拭器603)沿垂直于擦拭器单元604的移动方向延伸。因此,擦拭器单元604能够可靠地减少由墨接收面624接收的墨水朝墨水接收面624周围飞散。
278.图33是表示本实施例中维护动作的控制的流程图。图34是表示本实施例中维护动作的擦拭器单元604的俯视图。
279.控制器500根据传感器617a的检测信号确认擦拭器单元604是否处于原位置(ms1)。
280.控制器500打开可开闭阀234,从清洁液体供给器605供给清洁液体220。同时,控制器500打开电磁阀245,启动真空发生器242,从而清洁液体回收器606变为真空状态(ms2)。
281.控制器500驱动电机613,以便沿如图24和图25所示的 x轴方向移动擦拭器单元604,将擦拭器单元604移动到擦拭器603面对头300的喷嘴面302a的面对位置(ms3)。
282.当擦拭器603面对喷嘴面302a时,控制器500进一步使擦拭器单元604沿 x轴方向移动,同时用擦拭器603擦拭喷嘴面302a(ms4)。
283.当控制器500基于来自传感器617b的检测信号判断擦拭器单元604已经到达移动结束位置时,控制器500停止电机613,停止擦拭器单元604的移动(ms5)。
284.接着,控制器500朝相反方向驱动电机613,使得擦拭器单元604朝相反方向(
‑
x轴方向)移动,使得擦拭器单元604移动到擦拭器603面对喷嘴面302a而墨接收面624面对喷嘴面302a的面对位置(ms6)。
285.控制器500使擦拭器单元604沿
‑
x轴方向进一步移动,同时,擦拭器603面对喷嘴面302a,用擦拭器603擦拭喷嘴面302a,在擦拭器603通过(擦拭)喷嘴面302a之后,控制头300将墨水从喷嘴302朝向墨水接收面624排出(伪排出)(ms7)。
286.具体地说,如图34所示,控制部500在擦拭器603通过喷嘴302c之后,在凸部623通过喷嘴302c之前,控制头300以箭头“a”表示的方式从喷嘴302c向墨水接收面624排出墨水。于是,在图34中,擦拭器603设置在喷嘴302c的下方,凸部623设置在喷嘴302c的上方。相反地,在图34所示状态下,喷嘴302b由擦拭器603擦拭中,喷嘴302a由擦拭器603擦拭之前,喷嘴302a和喷嘴302b都不面对墨水接收面624。因此,控制部500不从喷嘴302a和302b排出墨水。
287.当控制器500基于来自传感器617a的检测信号判断擦拭器单元604已经到达待机位置(原位置)时,控制器500停止电机613,停止擦拭器单元604的移动(ms8)。
288.控制器500关闭可开闭阀234,停止从清洁液体供给器605向擦拭器603和墨水接收面供给清洁液体220,关闭电磁阀245,停止清洁液体回收器606的真空状态(ms9)。
289.如上所述,在墨水接收面624与喷嘴302对向状态下,当擦拭器单元604移动时,擦拭器603与喷嘴302和具有喷嘴302的喷嘴面302a接触。由此,当擦拭器单元604移动时,因擦拭器603接触,能擦拭并清洁喷嘴302和喷嘴面302a。
290.另外,液体排出设备1000包括控制器500,该控制器在擦拭器单元604移动期间,擦拭器603通过喷嘴302之后,将墨水从喷嘴302排出到墨水接收面624。从而液体排出设备1000可以从喷嘴302去除异物等,可靠地将墨水从喷嘴302排出到墨水接收面624。
291.图35a和图35b是根据本发明的第六实施例(第一变型)的擦拭器单元的立体图。
292.在图25所示的实施例中,擦拭器单元604沿着导向槽609的形状的轨迹移动。在图35a和图35b所示的第一变型例中,擦拭器单元604沿着导轨609r朝与x轴方向平行的方向移动。
293.在第一变型例中,控制器500驱动电机613并通过带614a将电机613的旋转驱动力传递到带614b和614c,如图25所示,移动连接到带614b和614c的擦拭器单元604。因此,擦拭器单元604沿着导轨609r的轨迹移动。
294.图36a和图36b是根据本发明的第七实施例(第二变型)的擦拭器单元604的立体图。
295.在如图32a至图32c所示的实施例中,擦拭器单元604包括擦拭器603,凸部623,以及在水平(横向)方向设于擦拭器603和凸部623之间的墨水接收面624。在如图36a和图36b所示的第二变型例中,擦拭器单元604包括第一擦拭器603a、第二擦拭器603b、以及在水平(横向)方向设于第一擦拭器603a和第二擦拭器603b之间的墨水接收面624。
296.墨水接收面624在擦拭器单元604的移动方向(在水平(横向)方向)配置在第一擦拭器603a和第二擦拭器603b之间。第一擦拭器603a和第二擦拭器603b分别是第一突出部和
第二突出部的例子。第一擦拭器603a和第二擦拭器603b沿垂直于擦拭器单元604的移动方向(垂直方向)延伸。第一擦拭器603a(第一突出部)和第二擦拭器603b(第二突出部)可以形成为单个擦拭器603,而不是在图35a和图35b中形成为像第一擦拭器603a和第二擦拭器603b这样的分离的部件。
297.第一擦拭器603a和第二擦拭器603b各自都包括形成为倾斜的上端面603h,使得上端面603h的墨水接收面624侧高于上端面603h的喷嘴面302a侧。因此,上端面603h倾斜使得上端面603h的喷嘴面302a侧低于与喷嘴面302a正交的面。换句话说,第一擦拭器603a和第二擦拭器603b的各自的上端面603h向下倾斜到面对第一擦拭器603a和第二擦拭器603b的头300的喷嘴面302a。
298.擦拭器侧供给口621包括面对第一擦拭器603a的上端面603h的第一供给口621a和面对第二擦拭器603b的上端面603h的第二供给口621b。因此,清洁液体220容易流向擦拭器603的喷嘴面302a侧。
299.在擦拭器单元604的移动方向(水平(横向)方向),在第一供给口621a和第二供给口621b之间设置有接收侧供给口622。
300.如上所述,第一擦拭器603a和第二擦拭器603b各自的上端面603h倾斜,使得上端面603h的喷嘴面302a侧低于上端面603h的墨水接收面624侧。因此,由第一擦拭器603a和第二擦拭器603b的各自上端面603h接收的清洁液体220可靠地供给到第一擦拭器603a和第二擦拭器603b各自的喷嘴面302a侧,因此,第一擦拭器603a和第二擦拭器603b能可靠地擦拭和清洁头300的喷嘴面302a。
301.图37是表示本发明的第七实施例(第二变型)中的液体排出设备1000的维护动作的控制的流程图。图38是表示本发明的第七实施例(第二变型)中的擦拭器单元604的维护动作的控制的顶视图。
302.控制器500根据来自传感器617a的检测信号,确认擦拭器单元604是否处于待机位置(原位置)(ms11)。
303.控制器500打开可开闭阀234,从清洁液体供给器605供给清洁液体220,还打开电磁阀245,启动真空发生器242,使清洁液体回收器606进入真空状态(ms12)。
304.控制器500驱动电机613,沿 x轴方向移动擦拭器单元604,将擦拭器单元604移动到擦拭器603面对头300的喷嘴面302a而墨水接收面624面对喷嘴302的面对位置(ms13)。
305.控制器500使擦拭器单元604沿 x轴方向进一步移动,同时,擦拭器603面对喷嘴面302a,用擦拭器603擦拭喷嘴面302a,在擦拭器603通过(擦拭)喷嘴面302a之后,控制头300将墨水从喷嘴302朝向墨水接收面624排出(伪排出)(ms14)。
306.具体地说,如图38所示,控制器500在第二擦拭器603b通过喷嘴302b之后,第一擦拭器603a通过喷嘴302b之前,控制头300以箭头“a”表示的方式从喷嘴302b向墨水接收面624排出墨水。于是,在图38中,第一擦拭器603a设置在喷嘴302b的下方,第二擦拭器603b设置在喷嘴302b的上方。
307.相反地,在图38所示状态下,喷嘴302a由第一擦拭器603a擦拭中,喷嘴302c由第二擦拭器603b擦拭之前,喷嘴302a和喷嘴302c都不面对墨水接收面624。因此,控制器500不从喷嘴302a和302c排出墨水。
308.当控制器500基于来自传感器617b的检测信号判断擦拭器单元604已经到达移动
结束位置时,控制器500停止电机613,停止擦拭器单元604的移动(ms15)。
309.接着,控制器500以相反方向驱动电机613在相反方向(
‑
x轴方向)移动擦拭器单元604,使得擦拭器单元604移动到擦拭器603面对喷嘴面302a而墨水接收面624面对喷嘴302的面对位置(ms16)。
310.控制器500使擦拭器单元604沿
‑
x轴方向进一步移动,同时擦拭器603面对喷嘴面302a,用擦拭器603擦拭喷嘴面302a,在擦拭器603通过(擦拭)喷嘴面302a之后,控制头300将墨水从喷嘴302朝向墨水接收面624排出(伪排出)(ms17)。
311.当控制器500根据来自传感器617b的检测信号判断擦拭器单元604已经到达待机位置(原位置)时,控制器500停止电机613,停止擦拭器单元604的移动(ms18)。
312.控制器500关闭可开闭阀234,停止从清洁液体供给器605向第一擦拭器603a和第二擦拭器603b供给清洁液体220,关闭电磁阀245,停止清洁液体回收器606的真空状态(ms19)。
313.图39a至图39d是打印头300和擦拭器单元604的正视图,表示在本发明的第七实施例(第二变型)中的维护动作。
314.图39a对应于图37中的流程图中的步骤ms13。图39a表示擦拭器单元604不面对喷嘴面302a的状态。
315.图39b至图39d对应于图37的流程图中的步骤ms13。图39b至图39d表示擦拭器单元604面对喷嘴面302a的状态。
316.在如图39b所示的状态下,第二擦拭器603b面对喷嘴面302a和喷嘴302a,第二擦拭器603b擦拭和清洁喷嘴面302a和喷嘴302a,同时,第二擦拭器603b沿 x轴方向(正x轴方向)移动。
317.在如图39b所示的状态下,第二擦拭器603b通过(擦拭)喷嘴302a,第二擦拭器603b在通过(擦拭)喷嘴302b之前,控制器500不从喷嘴302a和302b排出墨水,因为喷嘴302a和喷嘴302c都不面对墨水接收面624。
318.在如图39c所示的状态下,第二擦拭器603b和第一擦拭器603a面对喷嘴面302a,第二擦拭器603b和第一擦拭器603a擦拭和清洁喷嘴面302a,同时,沿 x轴方向(正x轴方向)移动。此外,控制器500驱动头300,从喷嘴302a排出墨水,因为喷嘴302a面对墨水接收面624。
319.相反地,控制器500不驱动头300从喷嘴302b排出墨水,因为第二擦拭器603b在通过(擦拭)喷嘴302b前,墨水接收面624不面对喷嘴302b。
320.在图39d所示的状态下,第二擦拭器603b面对喷嘴面302a和喷嘴302b,第二擦拭器603b擦拭和清洁喷嘴面302a和喷嘴302b,同时,沿 x轴方向(正x轴方向)移动。此外,在图39d中,第一擦拭器603a面对喷嘴面302a和喷嘴302a,第一擦拭器603a擦拭和清洁喷嘴面302a和喷嘴302a,同时,第一擦拭器603a沿 x轴方向(正x轴方向)移动。
321.相反地,控制器500不驱动头300从喷嘴302a和喷嘴302b排出墨水,因为第二擦拭器603b通过(擦拭)喷嘴302b,第一擦拭器603a通过(擦拭)喷嘴302a,喷嘴302a和喷嘴302b都不面对墨水接收面624。
322.如上所述,控制器500驱动头300,以便与擦拭器单元604的移动同步地从面对墨接收面624的喷嘴302顺序地排出墨。
323.然后,如图39b所示,第二擦拭器603b在墨水从喷嘴302a排出到墨水接收面624之
前擦拭喷嘴302a,以暂时清洁喷嘴302a的表面环境。
324.随后,如图39c所示,控制器500驱动头300将墨水从喷嘴302a排出到墨水接收面624上,以将干墨从喷嘴302a排出。
325.然后,如图39d所示,第一擦拭器603a在墨水从喷嘴302a排出到墨水接收面624上之后擦拭喷嘴302a,以使排出的干墨能够去除,最终清洁喷嘴302a。此外,上述清洁动作在前往路径和返回路径中执行两次,以进一步稳定地确保喷嘴302的正常状态。
326.图40是根据本发明第8实施例(第3变型)的液体排出设备1000的概要立体图。在图40中,液体排出设备1000将飞机作为绘制对象绘图。图41是根据本发明第8实施例(第3变型)的液体排出设备1000的立体图。
327.液体排出设备1000包括直线导轨404和多关节机器人405。直线导轨404引导沿直线导轨404往复线性移动的滑架601。多关节机器人405将直线导轨404适当地移动到预定位置,将直线导轨404保持在预定位置。
328.多关节机器人405包括机器人臂405a,该机器人臂405a通过多个关节能够如人臂那样自由地移动。多关节机器人405能使得机器人臂405a的前端自由地移动,将机器人臂405a的前端配置在正确的位置。
329.具有6轴(6关节)的6轴控制型工业机器人可以用作例如多关节机器人405。根据该6轴控制型多关节机器人405,可以事先教导与多关节机器人405的动作相关的信息,使直线导轨404正确且迅速地朝向描绘对象703(飞机)的预定位置。多关节机器人405的轴数不限于6个,可以使用具有5轴或7轴等适当轴数的多关节机器人。
330.液体排出设备1000在多关节机器人405的机器人臂405a设有分叉为二的叉状的支承部件424。液体排出设备1000进一步在支承部件424的左支路424a的前端安装垂直直线导轨423a,在支承部件424的右支路424b的前端安装垂直直线导轨423b。垂直直线导轨423a和垂直直线导轨423b互相平行。
331.此外,将可移动地保持滑架601的直线导轨404的两端架设在垂直直线导轨423a和423b上支撑。
332.滑架601例如安装有多个排出黑色、青色、品红色、黄色和白色各色液体的头300,或具有多个排出各色液体的喷嘴列的头300,如图24所示。各色液体分别在压力下从液体罐330供给头300或头300的喷嘴列,如上述图28所示液体供给系统那样以相同方式供给。
333.在液体排出设备1000中,多关节机器人405将直线导轨404移动到直线导轨404面对绘图对象703的所需绘图区域的对向位置,在驱动头300以在绘图对象703上打印图像的同时,根据打印数据沿着直线导轨404移动滑架601。
334.当液体排出设备1000结束一行绘制时,液体排出设备1000驱动多关节机器人405的垂直直线导轨423a和423b,以使滑架601的头300从一行移动到下一行。
335.液体排出设备1000重复上述动作,在描绘对象703的希望的印刷区域描绘图像。
336.在绘制动作期间,包括擦拭器603的滑架601可以随时用擦拭器603擦拭和清洁头300的喷嘴面302a,尽管滑架601(头300)的移动距离变长。
337.在本实施例的第四种变型例中,擦拭器603在一行擦拭动作之前和之后擦拭喷嘴302。从而液体排出设备1000能够以小的停机时间连续地绘制高质量的图像。
338.图42是根据本发明的第九实施例(第四变型)的液体排出设备1000的立体图。图43
是根据本发明的第九实施例(第四变型)的液体排出设备1000的驱动器的立体图。
339.液体排出设备1000包括可动框架802,该可动框架802安装成面对具有诸如车辆罩的曲面的绘制对象703。该框架802包括左框架810、右框架811和可动部813。可动部813安装于左框架810和右框架811,以使可动部813桥接在左框架810和右框架811之间。可动部813可沿y方向垂直移动。
340.可动部813包括具有内置电机的驱动器803和安装在驱动器803的滑架601。驱动器803可在可动部813的水平方向(x轴方向或横向方向)往复移动。滑架601向绘制对象703排出液体。
341.此外,液体排出设备1000包括控制器805和信息处理设备806。控制器805控制从安装在滑架601的头300排出的液体、驱动器803的往复移动和可动部813的垂直移动。诸如个人计算机(pc)的信息处理设备806向控制器805发送指令。信息处理设备806(pc)连接到记录并保存与诸如绘制对象703的形状和尺寸之类的绘制对象703相关的信息的数据库807(db)。
342.框架802进一步包括上框架808、下框架809、左框架810、以及右框架811,构成框架802的垂直和水平轮廓。上框架808、下框架809、左框架810和右框架811由金属管等形成。框架802进一步包括连接到下框架809的两端以使框架802自立的左脚部件812a和右脚部件812b。左脚部件812a和右脚部件812b垂直和水平地连接到下框架809的两端。
343.桥接在左框架810和右框架811之间的可动部813可在支撑驱动器803的同时垂直移动。
344.绘制对象703的面垂直于液体排出方向(z轴方向)。因此,绘制对象703的面面对由框架802的上框架808、下框架809、左框架810和右框架811形成的平面。
345.在上述情况下,为了将绘制对象703配置在进行绘制的预定的绘制位置,例如通过与多关节机器人405的机器人臂405a的前端连接的卡盘吸持绘制对象703的绘制区域的背面,利用多关节机器人405将绘制对象703准确地配置在印刷位置上,并适当地改变绘制对象703的姿势。
346.如图43所示,驱动器803沿作为导轨的可动部813可在水平(横向)方向(x轴方向)往复移动。可动部813包括导轨830、齿条831、直线导轨832、小齿轮833、电机834和旋转编码器835。导轨830水平配置成桥接于框架802的左框架810和右框架811之间。齿条831平行于导轨830。直线导轨832安装在导轨830的一部分并沿导轨830滑动。小齿轮833连接到直线导轨832并与齿条831啮合。电机834包括减速器836并驱动小齿轮833旋转。旋转编码器835检测绘图点的位置。
347.电机834正向或反向驱动使滑架601沿可动部813向右或向左移动。另外,驱动器803用作滑架601的驱动机构,沿x轴方向移动滑架601。减速器836包括安装在减速器836的壳体的两侧的限位开关837a和837b。
348.滑架601例如安装有多个排出黑色、青色、品红色、黄色和白色各色液体的头300,或具有多个排出各色液体的喷嘴列的头300,如图24所示。各色液体分别在压力下从液体罐330供给头300或头300的喷嘴列,如图28所示。
349.液体排出设备1000使可动部813沿y轴方向移动,使滑架601沿x轴方向移动,从而在绘制对象703上形成所希望的图像。
350.在绘制动作期间,包括擦拭器603的滑架601可以随时用擦拭器603擦拭和清洁头300的喷嘴面302a,尽管滑架601(头300)的移动距离变长。
351.因此,液体排出设备1000能够以较小的停机时间连续地绘制高质量图像。
352.图44是本发明第九实施例(第四变型)中的绘制动作的流程图。
353.在第四变型例中,液体排出设备1000在基材上依次形成底涂层和中间涂层的汽车车身等的绘制对象703上形成图案涂层。
354.第四变型中使用的基材可以是任何材料,没有限制,只要该基材可以用于汽车车身。作为基材的例子,有钢板、铝板、镀锌钢板、镀铁
‑
锌合金钢板、对上述金属基材进行诸如铬酸盐处理、磷酸锌处理、磷酸铁处理等化学转化处理而获得的经化学转化处理的金属基材,以及诸如玻璃纤维增强塑料(frp)等的塑料基材。
355.底涂层通过例如喷涂、浸涂、刷涂的已知方法在基材上形成。当基材是导电基材如金属基材或经化学处理的金属基材时,优选使用电泳涂料形成电泳涂层作为底涂层(cs1)。
356.为了形成电泳涂层,可以用公知方法将基材浸入电泳浴中,然后,形成电泳涂层。作为电泳浴,可以使用任何公知的阴离子型电泳浴和阳离子型电泳浴。
357.作为电泳浴的基体树脂成分,可以列举环氧树脂、丙烯酸树脂、聚丁二烯树脂、醇酸树脂、聚酯树脂、硅酮树脂等的一种或两种或更多种树脂。作为阴离子电泳浴,基体树脂成分包括诸如羧基的酸基团。作为阳离子电泳浴,基体树脂成分包括氨基和诸如铵基、锍基、鏻基的鎓基团等的碱基团。可以将上述基团中和、离子化,使上述基团水性化。
358.底涂层的厚度作为干膜厚度,通常约为5至40微米,优选约为15至30微米。
359.底涂之后,必要时用水清洗底涂层,接着,在底涂层经空气干燥或烘烤固化之后,将中间涂层涂料涂布到底涂层上(cs2)。作为中间涂层涂料,可以是水性涂料、有机溶剂型涂料、或粉体涂料的任何一种形态。树脂涂料的例子包括各种类型的树脂涂料,例如醇酸树脂、聚酯树脂、丙烯酸树脂、聚氨酯树脂和乙烯树脂。其中,中间涂层的材料通常使用醇酸树脂材料。
360.在第四变型例中,液体排出设备1000将预先设置在信息处理设备806中的预定图案(图案涂层)的涂层涂布到已依次形成上述底涂层和中间涂层的汽车车身上(cs3)。
361.图案涂层通常是厚度约为1
‑
10μm的薄膜,为了用该薄膜掩蔽底涂层和中间涂层,必须含有大量颜料。在第四变型例中,在图案涂层上进一步涂布透明涂料,以解决由于图案涂层中含有大量颜料所引起的问题,例如导致涂层表面外观劣化的光泽降低和导致耐候性和耐化学性劣化(cs4)。
362.透明涂料的实例包括有机溶剂型涂料、水系涂料、粉体涂料等,没有限制,只要透明涂料具有良好的耐候性就行。例如,作为树脂系,可以使用丙烯酸树脂系、聚酯树脂系、醇酸树脂系、硅酮树脂系、氟树脂系等各种树脂,既可以是热固化型树脂,也可以是用紫外线或电子射线等的活性光线而固化的树脂。作为透明涂料,包括用作汽车顶部透明涂层的透明涂料,其中,丙烯酸树脂系的热固化型透明涂料特别适合。
363.如上所述,根据本发明的实施例的滑架601(液体排出装置的实例)包括:包括喷嘴面302a(液体排出面的实例)的头300、与喷嘴面302a接触的擦拭器603(接触部的实例)、保持供给擦拭器603的清洁液体220的清洁液体回收器606(清洁液体保持器的实例)、以及保持擦拭器603和清洁液体回收器606的擦拭器单元604(擦拭器移动器)。擦拭器单元604可在
擦拭器603面对喷嘴面302a的面对位置和擦拭器603不面对喷嘴面302a的待机位置(原位置)之间移动,从而使清洁液体回收器606相对于水平面的倾斜度保持恒定。头300在喷嘴面302a包括喷嘴302(排出口的实例),头300从喷嘴302向绘制对象100(绘制对象的实例)排出墨水(液体的实例)。擦拭器603优选沿平行于喷嘴面302a的方向延伸。
364.这样,擦拭器603移动到面对喷嘴面302a的面对位置,用被供给清洁液体220的擦拭器603接触、擦拭和清洁喷嘴面302a,而不将喷嘴面302a移动到擦拭器603。此外,滑架601可以减少当擦拭器603移动到擦拭器603不面对喷嘴面302a的待机位置时在清洁液体回收器606中的清洁液体220摇晃而从清洁液体回收器606溢出的可能性。
365.擦拭器单元604在擦拭器603面对喷嘴面302a的面对区域,可移动而不改变清洁液体回收器606的高度。此外,擦拭器单元604在擦拭器603面对喷嘴面302a的面对区域,能在水平方向(横向)移动。于是,当擦拭器单元604移动时,由清洁液体回收器606保持的清洁液体220在高度方向(重力方向)没有受到力。因此,由清洁液体回收器606保持的清洁液体220不太可能摇晃而从清洁液体回收器606溢出。
366.滑架601包括保持喷嘴面302a并可移动地支撑擦拭器单元604的头固定板607,以及导向板608h和608l(壳体的一个例子)。
367.擦拭器单元604包括向擦拭器603供给清洁液体220的清洁液体供给器605。因此,清洁液体供给器605可靠地将清洁液体220供给到擦拭器603,从而擦拭器603可靠地擦拭和清洁喷嘴面302a。
368.喷嘴面302a配置在与水平面交叉的方向,擦拭器603向下方延伸,清洁液体供给器605从擦拭器603的上方供给清洁液体220。清洁液体供给器605可靠地向擦拭器603的下方供给清洁液体220,从而擦拭器603能可靠地擦拭和清洁喷嘴面302a的下方。
369.因此,上端面603h倾斜成使上端面603h的喷嘴面302a侧低于与喷嘴面302a正交的平面。换句话说,擦拭器603的上端面603h向着面对擦拭器603的头300的喷嘴面302a向下倾斜。从而由擦拭器603的上端面603h接收的清洁液体220可靠地供应到擦拭器603的喷嘴面302a,擦拭器603可靠地擦拭和清洁头300的喷嘴面302a。
370.此外,擦拭器单元604在擦拭器603面对喷嘴面302a的面对位置可水平(横向)移动。擦拭器603在垂直于擦拭器单元604移动方向(垂直方向)延伸。
371.另外,根据本发明实施例的液体排出设备1000包括如上所述的滑架601,以及可移动地保持滑架601的x轴导轨101、y轴导轨102、和z轴导轨103(参照图23a和图23b),或导轨830(导轨的一例,参照图42)。
372.因此,滑架601在沿x轴、y轴和z轴方向移动的同时可向绘制对象100排出墨水。与滑架601相对于绘制对象100的位置无关,滑架601将擦拭器603移动到擦拭器603在需要时面对喷嘴面302a的面对位置。因此,提供有清洁液体220的擦拭器603可以接触头300的喷嘴面302a,擦拭和清洁喷嘴面302a而不将喷嘴面302a移动到擦拭器603。
373.因此,液体排出设备1000能以较少的停机时间连续地绘制高质量图像,因为与滑架601向位置固定的擦拭器603移动场合相比,液体排出设备1000能够减少滑架601向擦拭器603移动所需的时间。
374.液体排出设备1000包括通过清洁液体回收管612(挠性管的一例)与清洁液体回收器606连接的废液罐240(清洁液体回收部的一例)。因此,由清洁液体回收器606保持的清洁
液体220可由废液罐240回收,而与滑架601相对于绘制对象100的位置无关。
375.液体排出设备1000包括在清洁液体回收管612和废液罐240之间产生负压的真空发生器242。因此,由清洁液体回收器606保持的清洁液体220可以由废液罐240可靠地回收。
376.液体排出设备1000包括提供加压空气的压缩机230(加压空气供给器的一例)和接收从压缩机230供给的加压空气并向喷嘴302供给加压墨水的液体罐330(液体保持器的一例)。真空发生器242利用从压缩机230接收的加压空气产生负压。因此,利用向头300供给墨水的压缩机230,由清洁液体回收器606保持的清洁液体可以由废液罐240可靠地回收。液体罐330接收从加压空气供给器(压缩机230)供给的加压空气,向头300供给加压液体。
377.本专利申请基于并根据35u.s.c.
§
119(a)要求于2019年4月3日向日本专利局提交的日本专利申请no.2019
‑
071041以及于2020年3月23日向日本专利局提交的日本专利申请no.2020
‑
051424的优先权,其全部公开内容通过引用作为参考。
378.附图标记列表
379.1液体排出设备
380.2圆筒(柱状部件)
381.10基座
382.11安装台
383.12固定部
384.13液体排出装置
385.14滑架
386.15框架
387.16滑块
388.300头
389.200清洁机构
390.201擦拭器
391.202清洁液体排出器
392.302喷嘴
393.305压电元件
394.307阀
395.500控制器
396.702打印对象
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。