1.本发明涉及一种连接器。
背景技术:
2.图9a和9b示出了传统的连接器(参见专利文献1)。该连接器630包括容纳阴端子的壳体631和安装成能够相对于壳体631在临时卡合位置和完全卡合位置之间移动的前保持器650。
3.前保持器650在从临时卡合位置到完全卡合位置的移动期间检测阴端子的不完全插入,并且通过定位在完全卡合位置来执行阴端子的双重卡合(即,限制未示出的阴端子保持矛杆的偏转)。此外,图9a和9b示出了将要解除其中前保持器650被定位到完全卡合位置且与壳体631完全卡合的完全卡合状态的该前保持器650。
4.前保持器650包括完全卡合弹性臂657,其具有与形成在壳体631中的完全卡合孔644卡合的完全卡合突起657a。完全卡合弹性臂657包括用于治具658的插入开口657b,其相对于完全卡合突起657a布置在内侧。治具658布置成解除前保持器650的完全卡合状态。该插入开口657b沿着与前保持器650的从临时卡合位置到完全卡合位置的移动方向正交的方向布置。
5.为了解除前保持器650的完全卡合状态以转移到临时卡合位置,将治具658的末端部658a插入到插入开口657b中以抬升完全卡合弹性臂657,并且在保持此状态的同时,将治具658朝向与插入方向正交的临时卡合位置操作,以便使治具658与完全卡合突起657a卡合。以这种方式,前保持器650的完全卡合状态被解除,从而允许从完全卡合位置转移到临时卡合位置。
6.现有技术文献
7.专利文献1:jp2018
‑
98114a
技术实现要素:
8.本发明要解决的问题
9.在上述的传统连接器630中,当解除前保持器650的完全卡合状态并转移到临时卡合位置时,其需要复杂的操作,包括将治具658插入到插入开口657b中以抬升完全卡合弹性臂657并向与插入方向正交的方向移动治具658。
10.鉴于此,本发明的目的是提供一种连接器,该连接器包括卡合突起和臂部,并且该连接器具有能够以简单的操作解除与卡合突起卡合的臂部的卡合的结构。
11.问题的解决方案
12.为了实现上述目的,在一个方面,本发明提供了一种连接器,所述连接器包括:第一壳体和第二壳体,所述第一壳体和所述第二壳体被构造为彼此配合;卡合突起,所述卡合突起形成在所述第二壳体上,从所述第二壳体的外表面突出;臂部,所述臂部形成在所述第一壳体上并且被构造为与所述卡合突起卡合,所述臂部具有开口,所述卡合突起被配合到
所述开口,其中,在所述臂部与所述卡合突起卡合并且所述卡合突起配合到所述开口的状态下,用于插入治具的间隙在所述卡合突起的侧方存在于所述开口中,所述侧方在与所述第二壳体配合到所述第一壳体的配合方向正交的方向上与所述卡合突起相邻,所述第二壳体包括解除操作部,所述解除操作部形成为在所述第二壳体的所述外表面上的凹槽并且被布置为使得所述治具能够从所述间隙插入,所述解除操作部相对于所述卡合突起延伸到所述配合方向上的后侧,并且倾斜表面形成在所述解除操作部的所述配合方向上的后端处,所述倾斜表面与所述第二壳体的外表面连续。
13.本发明的有益效果
14.根据本发明,能够利用简单的操作解除与卡合突起卡合的臂部的卡合。
附图说明
15.图1是根据本发明的一个实施例的连接器的分解图;
16.图2是图1的阴壳体的截面图;
17.图3是图1的阳壳体的截面图;
18.图4是示出图1的阴壳体和阳壳体完全彼此配合的完全配合状态的截面图;
19.图5是图1的阳壳体的放大视图;
20.图6示出了图1的连接器,并且示出了即将使用治具从卡合突起解除的臂部;
21.图7示出了由图6的治具抬升的臂部;
22.图8示出了图7的治具,其将要沿与配合方向相反的方向按压阳壳体;以及
23.图9a和9b示出了传统的连接器。
24.附图标记列表
[0025]1ꢀꢀꢀ
连接器
[0026]2ꢀꢀꢀ
阴壳体(第一壳体)
[0027]3ꢀꢀꢀ
阳壳体(第二壳体)
[0028]8ꢀꢀꢀ
治具
[0029]
25
ꢀꢀ
臂部
[0030]
25a 开口
[0031]
35
ꢀꢀ
卡合突起
[0032]
36
ꢀꢀ
解除操作部
[0033]
37
ꢀꢀ
壁部
[0034]
38
ꢀꢀ
倾斜表面
具体实施方式
[0035]
将参照附图1
‑
8描述根据本发明的一个实施例的连接器。
[0036]
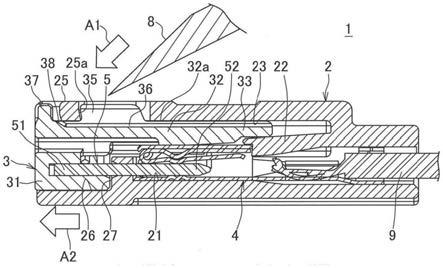
图1所示的连接器1包括:阴端子4;阴壳体2(对应于“第一壳体”),其具有容纳阴端子4的阴端子容纳空间21;汇流条5,其具有阳端子52,该阳端子52布置成配合到阴端子4;和阳壳体3(对应于“第二壳体”),该阳壳体3布置成容纳汇流条5并且能够配合到阴壳体2。
[0037]
在该实例中,连接器1设置有多个阴端子4,并且多个阴端子4布置为通过汇流条5彼此电连接。如上所述的连接器1也被称为“联合连接器(joint connector)”。
[0038]
通过将压制加工等应用于导电金属板来获得阴端子4。阴端子4包括筒部和矩形管状连接部,筒部被构造成压接电线9以电连接到电线9,阳端子52配合到矩形管状连接部,使得阳端子52电连接到矩形管状连接部。
[0039]
如图2所示,阴壳体2由绝缘合成树脂形成为矩形管状,并且阴壳体2的内部通过分隔壁27分隔成前部和后部。在分隔壁27的后侧处,可以分别容纳阴端子4的四个阴端子容纳空间21沿着宽度方向(即,与两个壳体2、3的配合方向正交并且对应于与图2的纸面垂直的方向的方向)平行地布置。在分隔壁27的前侧设置了能够配合阳壳体3的配合部26。
[0040]
在本文中,关于阴壳体2,其前侧对应于两个壳体2、3的配合方向上的阳壳体3侧;并且关于阳壳体3,其前侧对应于两个壳体2、3的配合方向上的阴壳体2侧。
[0041]
此外,临时卡合部24和臂部25由构成配合部26的外壁的一部分形成。临时卡合部24被布置成与阳壳体3的稍后描述的临时卡合突起34卡合。临时卡合部24具有用于定位临时卡合突起34的细长开口24a。臂部25布置成与阳壳体3的稍后描述的卡合突起35卡合。臂部25形成为悬臂板状并且具有开口25a,卡合突起35配合到该开口25a。
[0042]
每个阴端子容纳空间21设置有矛杆22,矛杆22布置成与阴端子4卡合以保持阴端子4不脱落。矛杆22以悬臂板形状的方式从阴端子容纳空间21的后侧向前侧延伸,并且矛杆22的末端被布置成与阴端子4的连接部的后缘(即,筒部侧的边缘)卡合。矛杆22能够弹性变形到在与阴端子4相反的一侧上形成的偏转空间23中。
[0043]
汇流条5通过冲压导电金属板而获得,并且包括带状基部51和四个阳端子52,四个阳端子52从基部51的长边延伸并且以杆状彼此平行地延伸。
[0044]
阳壳体3由绝缘合成树脂制成,并且如图3和图5所示,阳壳体3包括:保持部31,其被构造成保持基部51;板部32,其与保持部31连续并且与多个阳端子52平行地延伸;以及板状的限制部33,其与板部32的末端连续。阳壳体3还包括从板部32的外表面32a突出的临时卡合突起34、卡合突起35和壁部37。阳壳体3还包括解除操作部36,该解除操作部36形成为板部32的外表面32a上的凹槽,并且在壳体2、3的配合方向上以凹槽状的方式延伸。
[0045]
在上述连接器1中,临时卡合突起34配合到临时卡合部24的开口24a,从而将阴壳体2和阳壳体3置于临时配合状态。此时,臂部25和卡合突起35处于非卡合状态。
[0046]
此外,在上述连接器1中,阳壳体3从上述临时配合状态被更深地推入阴壳体2中,并且如图4所示,卡合突起35配合到臂部25的开口25a中,并且臂部25与卡合突起35卡合,从而将阴壳体2和阳壳体3置于完全配合状态。在图4所示的完全配合状态下,整个阳壳体3定位在阴壳体2内,保持部31配合到配合部26中,并且限制部33定位在偏转空间23中。
[0047]
如上所述,在两个壳体2、3完全彼此配合的状态下,限制部33定位在用于矛杆22的偏转空间23中并且限制矛杆22的偏转。限制部33还用作阴端子4的未完全插入检测部。也就是说,在阴端子4未完全插入到阴端子容纳空间21中的未完全插入状态下,矛杆22放置在阴端子4上方并且定位在偏转空间23中。因此,在将两个壳体2、3完全彼此配合的操作期间,限制部33的末端抵接矛杆22的末端,并且限制部33不能进入偏转空间23,因此两个外壳2、3不能完全彼此配合。具有如上所述的限制部33的阳壳体3也称为“端子位置保证构件”。
[0048]
接下来,将更详细地描述臂部25和卡合突起35的构造以及它们周围的构造。在臂部25与卡合突起35卡合并且卡合突起35配合到开口25a的状态下,在开口25a中在卡合突起35的侧方存在用于插入治具8的间隙。该“侧方”指的是在与壳体2、3的配合方向正交的方向
(即,阳壳体3的宽度方向)上与卡合突起35相邻。
[0049]
如图6
‑
8所示,治具8被构造成抬升与卡合突起35卡合的臂部25以解除卡合状态。治具8形成为厚度随着接近其末端而减小的杆状。
[0050]
解除操作部36形成在卡合突起35的侧方,并且解除操作部36从限制部33的末端相对于卡合突起35延伸到后侧。解除操作部36与开口25a中的间隙重叠,并且治具8能够从该间隙插入其中。
[0051]
解除操作部36可以不必形成为凹槽形状,只要解除操作部36相对于卡合突起35延伸到后侧并且形成为使得治具8可以从间隙插入其中,解除操作部36就可以形成为任何合适的形状。通过如在该实例中一样将解除操作部36形成为凹槽状,可以将治具8引导到配合方向的后侧,从而进一步有利于解除臂部25的卡合的解除操作。
[0052]
连接到板部32的外表面32a的倾斜表面38形成在解除操作部36的后端。该倾斜表面38用于将治具8引导到后侧和外表面32a侧。
[0053]
壁部37从连接到倾斜表面38的板部32的外表面32a的一部分突出。壁部37相对于与卡合突起35卡合的臂部25定位在后侧。
[0054]
接下来,将解释用于解除与卡合突起35卡合的臂部25的卡合的操作。首先,在两个壳体2、3完全彼此配合的状态下,将治具8沿着图6所示的箭头a1所指示的方向插入开口25a的间隙中,并且将治具8沿着解除操作部36在箭头a2指示的方向上(即,在向后方向上)推动。也就是说,使治具8的末端在臂部25下方移动。然后,如图7所示,沿着倾斜表面38进一步推动治具8。因此,臂部25沿箭头a3指示的方向被抬升,使得臂部25处于解除准备状态。此外,如图8所示,推动治具8以抵靠壁部37。因此,阳壳体3向箭头a4指示的方向移动,并且臂部25的卡合被解除,并且两个壳体2、3都转换为临时配合状态。
[0055]
如上所述,该实例的连接器1能够通过简单的操作解除与卡合突起35卡合的臂部25的卡合,简单的操作包括将治具8从开口25a中的间隙插入解除操作部36中并且在与插入方向相同的方向上推动治具8。也就是说,臂部25的卡合的解除可以通过单个动作来执行,从而提高工作效率。
[0056]
应当理解,上述实施例仅为本发明的代表性形式,并且本发明不限于此实施例。也就是说,在不脱离本发明的主旨的情况下,可以进行各种修改。这样的修改,只要它们仍然具有本发明的配置,当然也在本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。