1.本技术涉及截骨手术机器人领域,特别涉及一种手杆精密操作截骨机器人系统。
背景技术:
2.在利用机器人完成全膝关节置换手术或创伤或脊柱手术或其他骨骼手术中,需要精确控制电动锯片的运动平面、运动方向以及力反馈。
3.在现有技术中,在机械臂前端安装电锯刀具,机械臂在导航定位下运动到截骨平面的空间位置并把机械臂的运动范围限定在设定平面上,人抓着机械臂前端的电锯装置推动刀具在设定平面运动完成这一平面的切割。
4.目前的方法是利用机械臂的特性限定切割平面,由于机械臂是由电机控制的,机械臂的切割平面垂直方向限定的有一定的活动度,人在推动机械臂前端运动时由于人手的抖动不能做到真正的严格限制切割平面,所以切割后的效果通常比设定平面有一定的误差,并不理想。
5.目前的方法切割时刀具上受到的阻力以及骨骼对刀具的反作用力都是靠人的手感来感受,不能最大的发挥刀具的切割作用以及保证刀具的顺畅。
技术实现要素:
6.本技术要解决的技术问题为提一种手杆精密操作截骨机器人系统,该机器人系统的设计能够消除人手的抖动,精确的控制切割刀具在限定平面内的位置,并且能够合理调节切割刀具的进给速度,顺利完成手术。
7.为解决上述技术问题,本技术提供一种手杆精密操作截骨机器人系统,机器人系统包括机械臂装置、电动刀具装置、导航仪装置、摄像装置以及操作台装置;电动刀具装置连接于机械臂装置的前端;电动刀具装置上连接有切割刀具,用于执行截骨手术;导航仪装置用于实时获取切割刀具的参数信息,并根据该参数信息,驱动机械臂及电动刀具装置的运动位置;摄像装置用于实时拍摄截骨手术,并回传图像画面;操作台装置与机械臂装置、电动刀具装置、导航仪装置及摄像装置信号连接;操作台装置包括操作手杆、脚踏板、参数显示屏和图像显示屏;操作手杆与机械臂装置信号连接,通过操作手杆的摆动,驱动机械臂装置在限定的切割平面内进行位置微调;脚踏板与电动刀具装置信号连接,驱动电动刀具装置上的切割刀具执行切割手术;参数显示屏与导航仪装置信号连接,接收其回传的切割刀具的参数信息,并予以显示;图像显示屏与摄像装置信号连接,接收其回传的图像画面,并予以显示。
8.可选的,导航仪装置包括位置信息传感器和速度信息传感器,位置信息传感器用于实时获取切割刀具的位置参数信息,并回传给参数显示屏;速度信息传感器用于实时获取切割刀具的进给速度参数信息,并回传给参数显示屏;根据位置参数信息,执行者操纵操作手杆,调整机械臂装置在限定的切割平面内进行位置微调;根据进给速度参数信息,执行者操纵脚踏板,调整电动刀具装置的进给速度。
9.可选的,电动刀具装置包括力反馈传感器,用于实时获取切割刀具的切割力参数信息,并回传给参数显示屏;根据参数显示屏显示的切割力参数信息,执行者操纵脚踏板控制电动刀具装置的进给速度。
10.可选的,操作台装置包括工控主机,工控主机通过信号线与机械臂装置信号连接,驱动机械臂装置运动及位置调整。
11.可选的,工控主机通过信号线与导航仪装置信号连接,驱动导航仪装置获取切割刀具的参数信息。
12.可选的,导航仪装置包括红外光发射器和反光球参考架,红外光发射器用于发射红外光;反光球参考架分别设于骨骼上和电动刀具装置上,用于反射接收到的红外光;导航仪装置通过接收到的反光球参考架反射的红外光,计算切割刀具的参数信息。
13.可选的,工控主机包括控制卡,该控制卡与操作手杆和脚踏板信号连接,工控主机通过控制卡得到操作手杆和脚踏板的状态参数信息。
14.可选的,电动刀具装置还包括电机驱动板,该电机驱动板与控制卡信号连接,工控主机通过控制卡进而控制电机驱动板,电机驱动板驱动切割刀具执行截骨手术。
15.可选的,操作手杆至少包括第一手杆档位和第二手杆档位;在第一手杆档位,操作手杆操纵机械臂装置在限定的切割平面内,在第一位置阈值范围内进行位置微调;在第二手杆档位,操作手杆操纵机械臂装置在限定的切割平面内,在第二位置阈值范围内进行位置微调;第二位置阈值大于第一位置阈值。
16.可选的,脚踏板至少包括第一脚踏档位和第二脚踏档位;在第一脚踏档位,脚踏板操纵切割刀具在第一进给速度阈值范围内进行速度微调;在第二脚踏档位,脚踏板操纵切割刀具在第二进给速度阈值范围内进行速度微调;第二进给速度阈值大于第一进给速度阈值。
17.在一种实施例中,本技术所提供的一种手杆精密操作截骨机器人系统,机器人系统包括机械臂装置和电动刀具装置,电动刀具装置连接于机械臂装置的前端;电动刀具装置上连接有切割刀具,用于执行截骨手术;导航仪装置,用于实时获取切割刀具的参数信息,并根据该参数信息,驱动机械臂及电动刀具装置的运动位置;摄像装置,用于实时拍摄截骨手术,并回传图像画面;操作台装置,与机械臂装置、电动刀具装置、导航仪装置及摄像装置信号连接。
18.在上述方案的基础上,操作台装置包括:操作手杆,与机械臂装置信号连接,通过操作手杆的摆动,驱动机械臂装置在限定的切割平面内进行位置微调;脚踏板,与电动刀具装置信号连接,驱动电动刀具装置上的切割刀具执行切割手术;参数显示屏,与导航仪装置信号连接,接收其回传的切割刀具的参数信息,并予以显示;图像显示屏,与摄像装置信号连接,接收其回传的图像画面,并予以显示。
19.当进行工作时,通过预先输入的位置信息,使得机械臂装置及相应的电动刀具装置运动至限定的切割平面内。当进行切割时,通过操作手杆进行上下左右的调整,从而驱动机械臂装置进行上下左右的位置精确微调。当进行切割时,通过脚踏板压下,实现切割刀具的进给。在上述实施例中,导航仪装置用于实时获取切割刀具的参数信息,并根据该参数信息,驱动机械臂及电动刀具装置的运动位置。摄像装置用于实时拍摄截骨手术,并回传图像画面;参数显示屏,与导航仪装置信号连接,接收其回传的切割刀具的参数信息,并予以显
示;图像显示屏,与摄像装置信号连接,接收其回传的图像画面,并予以显示。
20.综上,该机器人系统的设计能够消除人手的抖动,精确的控制切割刀具在限定平面内的位置,并且能够合理调节切割刀具的进给速度,顺利完成手术。
附图说明
21.为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单介绍,显而易见地,下面描述中的附图是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
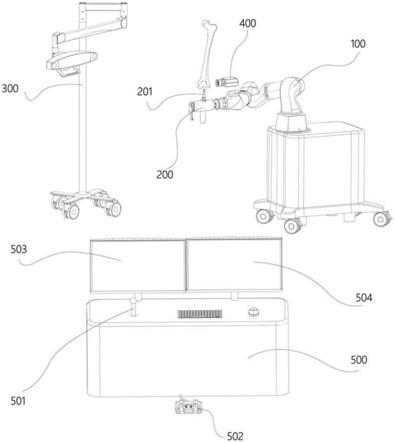
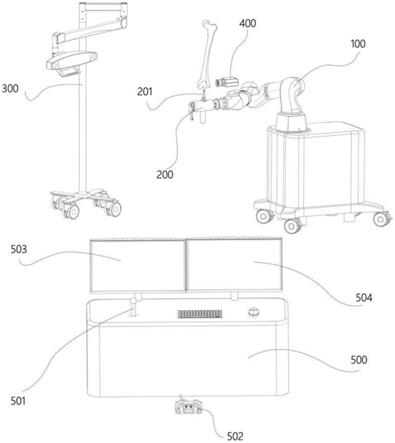
22.图1为本技术一种实施例示出的一种手杆精密操作截骨机器人系统结构示意图;
23.图2为图1中的一种手杆精密操作截骨机器人系统信号控制示意图。
24.部件名称与附图标记之间的对应关系为:
25.机械臂装置100;
26.电动刀具装置200、切割刀具201、电机驱动板202;
27.导航仪装置300、反光球参考架301;摄像装置400;
28.操纵台装置500、操作手杆501、脚踏板502、参数显示屏503、图像显示屏504、工控主机505、信号线506、控制卡507。
具体实施方式
29.为了使本技术领域的人员更好地理解本公开方案,下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述。
30.在本公开的说明书和权利要求书及上述附图中的描述的一些流程中,包含了按照特定顺序出现的多个操作,但是应该清楚了解,这些操作可以不按照其在本文中出现的顺序来执行或并行执行,操作的序号如101、102等,仅仅是用于区分开各个不同的操作,序号本身不代表任何的执行顺序。另外,这些流程可以包括更多或更少的操作,并且这些操作可以按顺序执行或并行执行。需要说明的是,本文中的“第一”、“第二”等描述,是用于区分不同的消息、设备、模块等,不代表先后顺序,也不限定“第一”和“第二”是不同的类型。
31.下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
32.请参考图1和图2,图1为本技术一种实施例示出的一种手杆精密操作截骨机器人系统结构示意图;图2为图1中的一种手杆精密操作截骨机器人系统信号控制示意图。
33.在一种实施例中,如图1,一种手杆精密操作截骨机器人系统,机器人系统包括:
34.机械臂装置;
35.电动刀具装置,连接于机械臂装置的前端;电动刀具装置上连接有切割刀具,用于执行截骨手术;
36.导航仪装置,用于实时获取切割刀具的参数信息,并根据该参数信息,驱动机械臂及电动刀具装置的运动位置;
37.摄像装置,用于实时拍摄截骨手术,并回传图像画面;
38.操作台装置,与机械臂装置、电动刀具装置、导航仪装置及摄像装置信号连接;
39.操作台装置包括:
40.操作手杆,与机械臂装置信号连接,通过操作手杆的摆动,驱动机械臂装置在限定的切割平面内进行位置微调;
41.脚踏板,与电动刀具装置信号连接,驱动电动刀具装置上的切割刀具执行切割手术;
42.参数显示屏,与导航仪装置信号连接,接收其回传的切割刀具的参数信息,并予以显示;
43.图像显示屏,与摄像装置信号连接,接收其回传的图像画面,并予以显示。
44.在一种实施例中,本技术所提供的一种手杆精密操作截骨机器人系统,机器人系统包括:
45.机械臂装置;电动刀具装置,连接于机械臂装置的前端;电动刀具装置上连接有切割刀具,用于执行截骨手术;导航仪装置,用于实时获取切割刀具的参数信息,并根据该参数信息,驱动机械臂及电动刀具装置的运动位置;摄像装置,用于实时拍摄截骨手术,并回传图像画面;操作台装置,与机械臂装置、电动刀具装置、导航仪装置及摄像装置信号连接;
46.在上述方案的基础上,操作台装置包括:操作手杆,与机械臂装置信号连接,通过操作手杆的摆动,驱动机械臂装置在限定的切割平面内进行位置微调;脚踏板,与电动刀具装置信号连接,驱动电动刀具装置上的切割刀具执行切割手术;参数显示屏,与导航仪装置信号连接,接收其回传的切割刀具的参数信息,并予以显示;图像显示屏,与摄像装置信号连接,接收其回传的图像画面,并予以显示。
47.当进行工作时,通过预先输入的位置信息,使得机械臂装置及相应的电动刀具装置运动至限定的切割平面内。当进行切割时,通过操作手杆进行上下左右的调整,从而驱动机械臂装置进行上下左右的位置精确微调。当进行切割时,通过脚踏板压下,实现切割刀具的进给。在上述实施例中,导航仪装置用于实时获取切割刀具的参数信息,并根据该参数信息,驱动机械臂及电动刀具装置的运动位置。摄像装置用于实时拍摄截骨手术,并回传图像画面;参数显示屏,与导航仪装置信号连接,接收其回传的切割刀具的参数信息,并予以显示;图像显示屏,与摄像装置信号连接,接收其回传的图像画面,并予以显示。
48.综上,该机器人系统的设计能够消除人手的抖动,精确的控制切割刀具在限定平面内的位置,并且能够合理调节切割刀具的进给速度,顺利完成手术。
49.在上述实施例中,还可以做出进一步改进。
50.比如,导航仪装置包括:
51.位置信息传感器,用于实时获取切割刀具的位置参数信息,并回传给参数显示屏;
52.速度信息传感器,用于实时获取切割刀具的进给速度参数信息,并回传给参数显示屏;
53.根据位置参数信息,执行者操纵操作手杆,调整机械臂装置在限定的切割平面内进行位置微调;
54.根据进给速度参数信息,执行者操纵脚踏板,调整电动刀具装置的进给速度。
55.通过上述技术方案,可以非常方便的使得导航仪获得切割刀具的位置参数信息和
速度参数信息,从而为精确控制奠定基础。
56.在上述任一种实施例中,还可以做出进一步改进。比如,电动刀具装置包括:
57.力反馈传感器,用于实时获取切割刀具的切割力参数信息,并回传给参数显示屏;
58.根据参数显示屏显示的切割力参数信息,执行者操纵脚踏板控制电动刀具装置的进给速度。
59.通过该力反馈传感器,可以获得切割刀具的切割力的数据,从而可以获知切割过程中的遇阻情况,从而根据该遇阻情况,精确调整切割刀具的切割力及进给速度等数据。在上述任一种实施例中,还可以做出进一步改进。
60.比如,请参考图2,操作台装置包括:
61.工控主机,工控主机通过信号线与机械臂装置信号连接,驱动机械臂装置运动及位置调整。工控主机通过信号线与导航仪装置信号连接,驱动导航仪装置获取切割刀具的参数信息。
62.此外,我们还可以对导航仪装置做出具体设计。
63.比如,导航仪装置包括:
64.红外光发射器,用于发射红外光;
65.反光球参考架,分别设于骨骼上和电动刀具装置上,用于反射接收到的红外光;导航仪装置通过接收到的反光球参考架反射的红外光,计算切割刀具的参数信息。
66.通过上述装置的设计,能够非常非常方便的获得切割刀具的参数信息。
67.此外,如图2所示,工控主机包括:
68.控制卡,该控制卡与操作手杆和脚踏板信号连接,工控主机通过控制卡得到操作手杆和脚踏板的状态参数信息。电动刀具装置还包括:
69.电机驱动板,该电机驱动板与控制卡信号连接,工控主机通过控制卡进而控制电机驱动板,电机驱动板驱动切割刀具执行截骨手术。
70.在上述任一种实施例中,还可以做出进一步改进。
71.比如,操作手杆至少包括第一手杆档位和第二手杆档位;
72.在第一手杆档位,操作手杆操纵机械臂装置在限定的切割平面内,在第一位置阈值范围内进行位置微调;
73.在第二手杆档位,操作手杆操纵机械臂装置在限定的切割平面内,在第二位置阈值范围内进行位置微调;
74.第二位置阈值大于第一位置阈值。
75.需要说明的是,本身对于第一手杆档位和第二手杆档位的具体实施方式不作限制,因而任一种设置方式均应该本技术的保护范围之内。作为一种具体举例,可以采用按钮设置的方式,也可以为在参数显示屏上设置的交互入口,可以通过该交互入口进行交互输入,实现相应的档位选择。
76.在上述实施例中,可以根据切割的具体情况,选择合适的档位。当位置微调要求更精确,余地较小时,可以选择第一手杆档位。当位置微调要求一般精确,余地较大时,可以选择第二手杆档位。因而该种设计使得位置微调具有了较大的缓冲余地和通用性。
77.在上述实施例中,还可以做出进一步改进。
78.比如,脚踏板至少包括第一脚踏档位和第二脚踏档位;
79.在第一脚踏档位,脚踏板操纵切割刀具在第一进给速度阈值范围内进行速度微调;
80.在第二脚踏档位,脚踏板操纵切割刀具在第二进给速度阈值范围内进行速度微调;
81.第二进给速度阈值大于第一进给速度阈值。
82.在上述实施例中,可以根据切割具体情况,现在合适的进给档位。当骨骼较硬不易进给时或者需要更精确的进给控制时,可以选择第一脚踏档位。相反,可以选择第二脚踏档位。因而该种设计使得切割刀具的进给调节具有了较大的缓冲余地和通用性。
83.需要说明的是,在上述两个脚踏档位中,用户可以自己手术需要设定脚踏踩下的进给速度。
84.此外,如图2所示,具体的信号控制过程为:
85.工控主机,通过pci i/o控制卡得到手杆和脚踏的状态信息;主机通过网线和机械臂控制器连接,控制机械臂的运动;主机通过pci i/o控制卡控制电机驱动板来控制刀具的摆动;主机连接导航仪,通过骨骼上的反光球参考架和执行机构上的反光球参考架,实时获取当前机械臂执行机构(刀具)的位置信息,计算并控制机械臂和执行机构运动到相对骨骼的精确位置。主机获取到手杆的上/下/左/右位置,发送指令给机械臂,机械臂沿着上/下/左/右方向运动,进行位置的微调;主机得到脚踏被踩下的信息,通过电机驱动板给刀具上电,使刀具摆动。
86.本技术提供的实施例之间的相似部分相互参见即可,以上提供的具体实施方式只是本技术总的构思下的几个示例,并不构成本技术保护范围的限定。对于本领域的技术人员而言,在不付出创造性劳动的前提下依据本技术方案所扩展出的任何其他实施方式都属于本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。