技术特征:
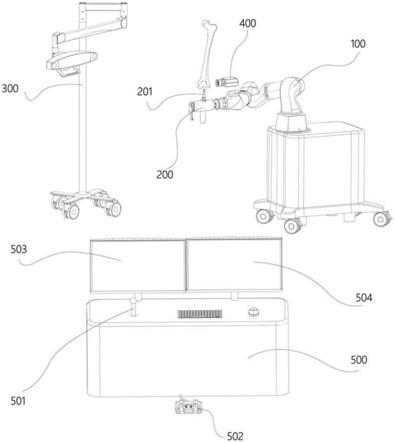
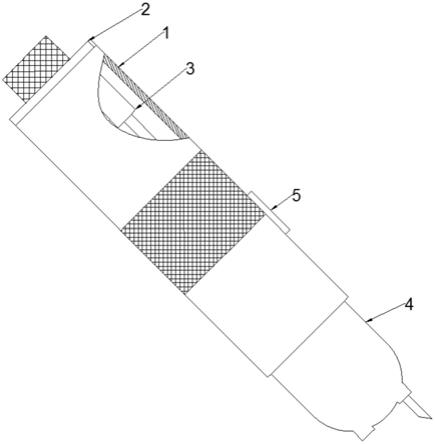
1.一种手杆精密操作截骨机器人系统,其特征在于,所述机器人系统包括:机械臂装置;电动刀具装置,连接于所述机械臂装置的前端;所述电动刀具装置上连接有切割刀具,用于执行截骨手术;导航仪装置,用于实时获取所述切割刀具的参数信息,并根据该参数信息,驱动所述机械臂及所述电动刀具装置的运动位置;摄像装置,用于实时拍摄截骨手术,并回传图像画面;操作台装置,与所述机械臂装置、电动刀具装置、导航仪装置及摄像装置信号连接;所述操作台装置包括:操作手杆,与所述机械臂装置信号连接,通过操作手杆的摆动,驱动所述机械臂装置在限定的切割平面内进行位置微调;脚踏板,与所述电动刀具装置信号连接,用于驱动所述电动刀具装置上的切割刀具;参数显示屏,与所述导航仪装置信号连接,接收其回传的切割刀具的参数信息,并予以显示;图像显示屏,与所述摄像装置信号连接,接收其回传的图像画面,并予以显示。2.如权利要求1所述的一种手杆精密操作截骨机器人系统,其特征在于,所述导航仪装置包括:位置信息传感器,用于实时获取所述切割刀具的位置参数信息,并回传给所述参数显示屏;速度信息传感器,用于实时获取所述切割刀具的进给速度参数信息,并回传给所述参数显示屏;根据所述位置参数信息,执行者操纵所述操作手杆,调整所述机械臂装置在限定的切割平面内进行位置微调;根据所述进给速度参数信息,执行者操纵所述脚踏板,调整所述电动刀具装置的进给速度。3.如权利要求1所述的一种手杆精密操作截骨机器人系统,其特征在于,所述电动刀具装置包括:力反馈传感器,用于实时获取所述切割刀具的切割力参数信息,并回传给所述参数显示屏;根据所述参数显示屏显示的切割力参数信息,执行者操纵脚踏板控制所述电动刀具装置的进给速度。4.如权利要求1
‑
3任一项所述的一种手杆精密操作截骨机器人系统,其特征在于,所述操作台装置包括:工控主机,所述工控主机通过信号线与所述机械臂装置信号连接,驱动所述机械臂装置运动及位置调整。5.如权利要求4所述的一种手杆精密操作截骨机器人系统,其特征在于,所述工控主机通过信号线与所述导航仪装置信号连接,驱动所述导航仪装置获取所述切割刀具的参数信息。6.如权利要求5所述的一种手杆精密操作截骨机器人系统,其特征在于,所述导航仪装
置包括:红外光发射器,用于发射红外光;反光球参考架,分别设于骨骼上和所述电动刀具装置上,用于反射接收到的所述红外光;所述导航仪装置通过接收到的所述反光球参考架反射的红外光,计算所述切割刀具的参数信息。7.如权利要求4所述的一种手杆精密操作截骨机器人系统,其特征在于,所述工控主机包括:控制卡,该控制卡与所述操作手杆和所述脚踏板信号连接,所述工控主机通过所述控制卡得到所述操作手杆和所述脚踏板的状态参数信息。8.如权利要求7所述的一种手杆精密操作截骨机器人系统,其特征在于,所述电动刀具装置还包括:电机驱动板,该电机驱动板与所述控制卡信号连接,所述工控主机通过所述控制卡进而控制所述电机驱动板,所述电机驱动板用于驱动所述切割刀具。9.如权利要求1
‑
3任一项所述的一种手杆精密操作截骨机器人系统,其特征在于,所述操作手杆至少包括第一手杆档位和第二手杆档位;在所述第一手杆档位,所述操作手杆操纵所述机械臂装置在限定的切割平面内,在第一位置阈值范围内进行位置微调;在所述第二手杆档位,所述操作手杆操纵所述机械臂装置在限定的切割平面内,在第二位置阈值范围内进行位置微调;所述第二位置阈值大于所述第一位置阈值。10.如权利要求1
‑
3任一项所述的一种手杆精密操作截骨机器人系统,其特征在于,所述脚踏板至少包括第一脚踏档位和第二脚踏档位;在所述第一脚踏档位,所述脚踏板操纵所述切割刀具在第一进给速度阈值范围内进行速度微调;在所述第二脚踏档位,所述脚踏板操纵所述切割刀具在第二进给速度阈值范围内进行速度微调;所述第二进给速度阈值大于所述第一进给速度阈值。
技术总结
本申请提供一种手杆精密操作截骨机器人系统,包括机械臂装置、电动刀具装置、导航仪装置、摄像装置以及操作台装置;电动刀具装置连接于机械臂装置的前端;电动刀具装置上连接有切割刀具,用于执行截骨手术;导航仪装置用于实时获取切割刀具的参数信息;摄像装置用于实时拍摄截骨手术,并回传图像画面;操作台装置与机械臂装置、电动刀具装置、导航仪装置及摄像装置信号连接;操作台装置包括操作手杆、脚踏板、参数显示屏和图像显示屏;操作手杆与机械臂装置信号连接;脚踏板与电动刀具装置信号连接,驱动电动刀具装置上的切割刀具执行切割手术;参数显示屏与导航仪装置信号连接;图像显示屏与摄像装置信号连接。显示屏与摄像装置信号连接。显示屏与摄像装置信号连接。
技术研发人员:李书纲 闫钧
受保护的技术使用者:北京和华瑞博医疗科技有限公司
技术研发日:2021.01.08
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。