1.本实用新型涉及自动化检测设备技术领域,具体为一种软袋智能灯检机。
背景技术:
2.医用输液软袋是用于存储药液的,但由于生产环境或生产工艺等方面的原因,输液成品中可能混入一些粒径微小的异物,如铝屑、玻璃屑、橡皮屑、纤维或不溶药质等微小的异物。在静脉输液的过程中,这些异物可能会随着液体进入人体内,从而导致血管堵塞,严重影响病人的生命和健康。因此,在输液成品生产的过程中需对输液软袋内注射的药液逐个进行异物检查。
3.目前的检测方式是通过人工的视觉进行检查,检查人员在一定的灯光条件下,通过肉眼直接观察输液软袋内的药液,软袋内是否存在异物,如此,不仅增加了劳动强度大,增加了大规模生产过程中的劳动成本,而且检测人员长时间检测也会出现视觉疲劳和质量波动,影响检测效果和检测效率。
技术实现要素:
4.本实用新型的目的在于克服上述现有技术的不足之处,提供了一种软袋智能灯检机及检测流水线。
5.为了实现以上目的,本实用新型提供如下技术方案:
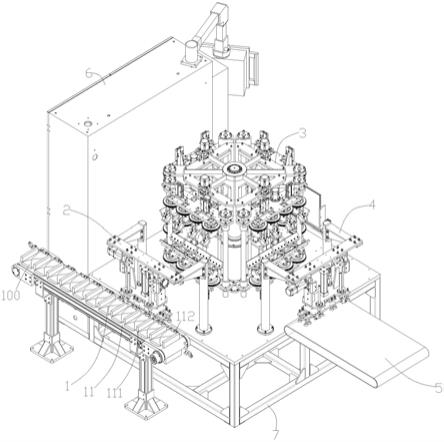
6.一种软袋智能灯检机,包括依次设置的进料输送线、上料机构、灯检机构、下料机构、出料输送线;所述上料机构设置在进料输送线和灯检机构的之间,用于将进料输送线上的软袋搬运至灯检机构;所述灯检机构包括底座、旋转支架、甩动机构和拍摄机构;所述旋转支架可旋转的安装在所述底座上;所述甩动机构安装在所述旋转支架的外侧,用以夹持和甩动软袋,所述旋转支架带动所述甩动机构沿上料区、拍摄区和下料区转动,上料区位于所述上料机构的一侧;所述拍摄机构设置在拍摄区的一侧,其设有用于拍摄软袋的相机;所述下料机构设置在下料区和所述出料输送线之间,用以将下料区的软袋搬运至所述出料输送线。
7.作为一种优选方案,所述灯检机构还包括光源,所述光源位于所述拍摄区远离所述拍摄机构的一侧。
8.作为一种优选方案,所述甩动机构包括安装架、上下相对设置的第一夹持装置和第二夹持装置;所述安装架固设在所述旋转支架的一侧;所述第一夹爪装置包括第一安装板、第一夹爪、第一气缸和第一驱动电机;所述第一安装板与所述安装架相连;所述第一夹爪可转动地安装在所述第一安装板下侧,用以夹持软袋上端;所述第一气缸安装在第一安装板上并驱动所述第一夹爪打开闭合;所述第一驱动电机安装在所述第一安装板上并驱动所述第一夹爪旋转;所述第二夹持装置包括第二安装板、第二夹爪、第二气缸和第二驱动电机;所述第二安装板与所述安装架相连并设置在第二安装板的下方;所述第二夹爪可转动地安装在所述第一安装板上侧,并与所述第一夹爪的位置上下对应,其用于夹持软袋下端;
所述第二气缸安装在所述第二安装板上并驱动第二夹爪打开闭合;所述第二驱动电机安装在所述第二安装板上并驱动所述第二夹爪旋转。
9.作为一种优选方案,所述第一夹持装置包括横向等距排布多个所述第一夹爪,每一所述第一夹爪安装一第一外齿轮,相邻第一夹爪的所述第一外齿轮啮合;所述第一驱动电机的转动轴设置第一驱动齿轮,所述第一驱动齿轮与其中一个所述第一外齿轮啮合;所述第二夹持装置包括横向等距排布多个所述第二夹爪,每一所述第二夹爪安装一第二外齿轮,相邻第一夹爪的所述第二外齿轮啮合;所述第二驱动电机的转动轴设置第二驱动齿轮,所述第二驱动齿轮与其中一所述第二外齿轮啮合。
10.作为一种优选方案,所述安装架包括固定板、托板、丝杆机构、支撑杆和丝杆驱动电机;所述固定板设置在所述第一安装板的上侧;所述托板安装在所述固定板的下侧;所述支撑杆竖直设置且位于所述第一夹持装置和所述第二夹持装置的后方,其两端分别连接所述固定板和所述托板;所述丝杆机构包括设置在所述固定板和所述托板之间的丝杆和安装在丝杆上的第一丝杆螺帽和第二丝杆螺帽,所述第一丝杆螺帽与所述第一安装板固定,所述第二丝杆螺帽与所述第二安装板固定;所述丝杆驱动电机安装在所述固定板上并驱动所述丝杆旋转。
11.作为一种优选方案,所述安装架还包括升降导杆,其上端与所述固定板固定;所述第一安装板设置套接所述升降导杆的第一导套,所述第二安装板设置套接所述升降导杆的第二导套。
12.作为一种优选方案,所述第二夹爪包括轴套、夹具安装座、夹具、推杆和连接头;所述轴套具有一内腔,用以收容所述推杆;所述夹具安装座可转动式地安装在轴套上,其包括相对设置的两个固定轴;两个所述夹具相对设置,每一夹具具有一枢接部和分别设置在枢接部两端的延伸部和夹持部,所述夹持部向上露出夹具安装座,其内侧面安装有用于夹持软袋的透明夹块;所述推杆可升降地穿设于所述内腔,其下端与所述第二气缸相连;所述连接头可转动地安装在推杆的顶端,其两端分别与对应夹具相连。
13.作为一种优选方案,所述上料机构包括固定架、摆动架、旋转驱动机构、抓手和抓手气缸;所述摆动架的一端与所述固定架可旋转相连,另一端连接所述抓手;所述旋转驱动机构安装在固定架的一侧并驱动摆动架旋转;所述抓手活动安装在所述摆动架上并设置有用于吸附软袋的多个吸盘;所述抓手气缸安装在所述摆动架上并与所述抓手驱动相连。
14.作为一种优选方案,所述摆动架包括气缸安装板和两个气缸撑板;所述气缸安装板连接所述抓手,所述抓手气缸安装在所述气缸安装板远离抓手的一侧;每一所述气缸撑板的两端分别连接气缸安装板和所述固定架,所述旋转驱动机构与其中一所述气缸撑板相连。
15.作为一种优选方案,所述固定架包括一连接板和两个翻转安装架;所述连接板水平设置且位于所述进料输送线的上方;两个所述翻转安装架间隔设置并且安装在所述连接板的下侧,所述气缸撑板远离气缸安装板的一端与对应的所述翻转安装架连接;所述旋转驱动机构安装在其中一所述翻转安装架的一侧;所述固定架还包括间隔设置的一对固定柱,所述固定柱位于上料位和所述进料输送线之间,每一所述固定柱的顶端安装有朝所述进料输送线一侧横向延伸的一延伸板,每一所述延伸板的前端与所述连接板的一端固定。
16.与现有技术相比,本实用新型具有如下的有益效果:
17.1、本实用新型实现了透明软袋上料、旋转运动、拍摄检测和下料的全自动化工序,能快速有效地检测出透明软袋内溶液是否存在异物,节省人工操作所耗费的时间和人力;
18.2、当甩动机构旋转到拍摄区时,透明软袋内液体在惯性作用下仍继续旋转而处于晃动状态,此时相机在不同时间点对瓶身进行多次图像拍摄,并将拍摄图像传输至数据处理及控制单元内,若液体内存在异物,则异物会随着液体的晃动而发生位置变化,即透明软袋内部的液体处于晃动的状态下进行拍摄,便于检测机构拍摄出异物,提高检测精度。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
20.图1是本实用新型中软袋智能灯检机的立体图;
21.图2是本实用新型中软袋智能灯检机的俯视图;
22.图3是本实用新型中灯检机构的侧视图;
23.图4是图3沿a
‑
a方向剖切的剖视图;
24.图5是本实用新型中上料机构下摆状态下的立体图;
25.图6是本实用新型中上料机构上摆状态下的立体图;
26.图7是本实用新型中甩动机构的立体图;
27.图8是本实用新型中甩动机构的后视图;
28.图9是本实用新型中第二夹爪的立体图;
29.图10是本实用新型中第二夹爪的剖视图;
30.图11是图10沿b
‑
b剖切的剖视图;
31.图中:
32.进料输送线1;同步带11;挡块111;袋口限位件112;上料机构2;固定架21;固定柱211;延伸板212;连接板213;翻转安装架214;第二翻转限位块2141;第一翻转限位块2142;旋转驱动机构22;伺服电机221;减速器222;摆动架23;气缸安装板231;导套232;气缸撑板233;加强筋234;抓手24;吸盘安装板241;吸盘242;导向杆243;抓手气缸25;灯检机构3;拍摄机构31;相机311;相机支架312;光源32;甩动机构33;安装架331;固定板3311;丝杆驱动电机3312;升降导杆3313;支撑杆3314;丝杆3315;托板3316;第一丝杆螺帽3317;第二丝杆螺帽3318;第一夹持装置332;第一安装板3321;第一导套33211;第一气缸3322;第一夹爪3323;第一外齿轮33231;第一驱动电机3324;第二夹持装置333;第二夹爪3331;第二安装板3332;第二导套33321;第二气缸3333;第二驱动电机3334;第二驱动齿轮33341;旋转支架34;中心转轴341;转盘342;底座35;轴套10;推杆20;夹具30;枢接部310;夹持部320;延伸部330;槽口3310;夹具安装座40;固定轴410;第二轴承420;防水盖430;固定块440;安装板450;升降缓冲垫460;夹爪轴承座470;连接头50;第一轴承510;轴承端盖520;主体530;延伸臂5310;齿轮60;透明夹块70;夹爪垫板710;下料机构4;出料输送线5;电控箱6;机台7;透明软袋100。
具体实施方式
33.为便于更好地理解本实用新型的目的、结构、特征以及功效等,现结合附图和具体实施方式对本实用新型作进一步说明。应注意的是,图中示出的特征不是必须按照比例绘制。此外,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”、“前”、“后”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。此外,在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
35.如图1
‑
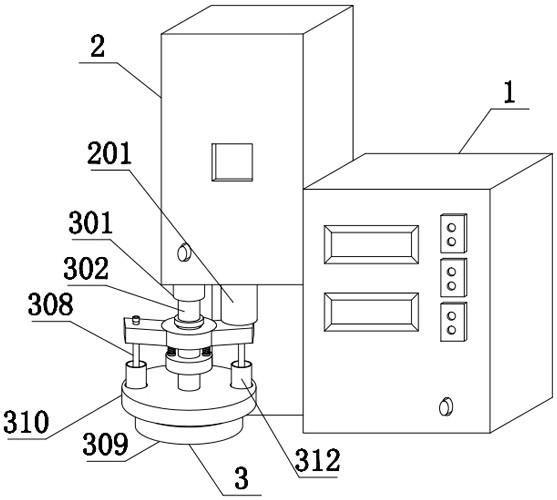
2,本实用新型提供一种软袋智能灯检机,用于检测透明软袋100内的液体是否存在异物。软袋智能灯检机包括依次设置的进料输送线1、上料机构2、灯检机构3、下料机构4、出料输送线5;上料机构2设置在进料输送线1和灯检机构3的之间,用于将进料输送线1上的软袋搬运至灯检机构3;灯检机构3包括底座35、旋转支架34、甩动机构33和拍摄机构31;旋转支架34可旋转的安装在底座35上;甩动机构33安装在旋转支架的外侧,用以夹持和甩动软袋,旋转支架34带动甩动机构33沿上料区、拍摄区和下料区转动,上料区位于上料机构2的一侧;拍摄机构31设置在拍摄区的一侧,其设有用于拍摄软袋的相机;下料机构4设置在下料区和出料输送线5之间,用以将下料区的软袋搬运至出料输送线5。本实施例中,灯检机构3共设置四个甩动机构33,并呈等距环形布置,工作时,四个甩动机构33分别位于上料区、甩动区、拍摄区和下料区,可同步进行各阶段的操作,提升工作效率。
36.如图1
‑
2,进料输送线1设有同步带11,同步带11上安装有等距分布的挡块111,以实现透明软袋100的定距离输送。此外同步带11上设置袋口限位件112,用以限制透明软袋100的袋口位置,进一步限定透明软袋100的位置,便于上料机构2准确定位和抓取。
37.如图3
‑
4,上料机构2包括固定架21、摆动架23、旋转驱动机构22、抓手24和抓手气缸25;其中,摆动架23的一端与固定架21可旋转相连,另一端连接抓手24;旋转驱动机构22安装在固定架21的一侧并驱动摆动架23旋转;抓手24活动安装在摆动架23上并设置有用于吸附软袋的多个吸盘242;抓手气缸25安装在摆动架23上并与抓手24驱动相连。使用摆转式输送,可同时从流水线上抓取多个透明软袋100,相比传统机械手运输效率更高。
38.摆动架23包括气缸安装板231和两个气缸撑板233;气缸安装板231连接抓手24,抓手气缸25安装在气缸安装板231远离抓手24的一侧;两个气缸撑板233对称设置并与气缸安装板231相垂直,每一气缸撑板233的两端分别连接气缸安装板231和固定架21;每一气缸撑板233的两端分别连接气缸安装板231和固定架21,旋转驱动机构22与其中一气缸撑板233相连。设置两个气缸撑板233连接气缸安装板231,利于结构稳定。抓手气缸25设置在两个气缸撑板233之间,利于减少占用空间。
39.抓手24包括吸盘安装板241,吸盘安装板241靠近气缸安装板231的一侧与抓手气缸25相连,吸盘安装板241设有间隔设置的多个抓取区,每一抓取区设置多个吸盘242。当抓
手24移动至对应抓取位时,吸盘242启动并吸附软袋表面。设置多个抓取区可同时抓取多个透明软袋100,提升作业效率。每一抓取区设置多个吸盘242可更加稳固地抓取透明软袋100。
40.气缸安装板231上设置导套232;吸盘安装板241上安装有导向杆243,导向杆243活动穿过导套232。本实施例中,气缸安装板231设置有呈矩阵分布的四个导套232,吸盘安装板241对应安装有四个导向杆243,设置导套232和导向杆243可提升抓手24伸缩运动的稳定性。
41.此外,气缸安装板231和气缸撑板233之间安装加强筋234,可增强气缸安装板231和气缸撑板233的连接稳定性。
42.固定架21包括一连接板213和两个翻转安装架214;连接板213水平设置且位于进料输送线1的上方;两个翻转安装架214间隔设置并且安装在连接板213的下侧,气缸撑板233远离气缸安装板231的一端与对应的翻转安装架214连接;旋转驱动机构22安装在其中一翻转安装架214的一侧。本实施例中,旋转驱动机构包括伺服电机221和减速器222,减速器222安装在伺服电机221和其中一个翻转安装架214之间。固定架21还包括间隔设置的一对固定柱211,固定柱211位于上料位和进料输送线1之间,每一固定柱211的顶端安装有朝进料输送线1一侧横向延伸的一延伸板212,每一延伸板212的前端与连接板213的一端固定。
43.翻转安装架214安装有用于挡止摆动架23过度上摆的第一翻转限位块2142和用于挡止摆动架23过度下摆的第二翻转限位块2141。本实施例中,摆动架23活动范围为90度,从进料输送线1抓取透明软袋100时,摆动架23下摆,吸盘242吸住软袋,此时软袋呈水平状态,随后摆动架23向上摆动度将软袋动至上料区,软袋从水平状态转换成竖直状态。此外,翻转限位块上设置软胶结构,可起到缓冲保护作用。
44.如图5
‑
6,旋转支架34包括一中心转轴341和一转盘342,中心转轴341可转动地安装在底座35上上,转盘342固设在中心转轴341的顶端。
45.如图5
‑
8所示,甩动机构33包括安装架331、上下相对设置的第一夹持装置332和第二夹持装置333;其中,安装架331固设在转盘342的一侧;第一夹爪3323装置包括第一安装板3321、第一夹爪3323、第一气缸3322和第一驱动电机3324;第一安装板3321与安装架331相连;第一夹爪3323可转动地安装在第一安装板3321下侧,用以夹持透明软袋100上端;第一气缸3322安装在第一安装板3321上并驱动第一夹爪3323打开闭合;第一驱动电机3324安装在第一安装板3321上并驱动第一夹爪3323旋转;第二夹持装置333包括第二安装板3332、第二夹爪3331、第二气缸3333和第二驱动电机3334;第二安装板3332与安装架331相连并设置在第二安装板3332的下方;第二夹爪3331可转动地安装在第一安装板3321上侧,并与第一夹爪3323的位置上下对应,其用于夹持透明软袋100下端;第二气缸3333安装在第二安装板3332上并驱动第二夹爪3331打开闭合;第二驱动电机3334安装在第二安装板3332上并驱动第二夹爪3331旋转。使用时,第一夹爪3323和第二夹爪3331分别夹持透明软袋100的上下两端,甩动机构33到达甩动区时,第一夹爪3323和第二夹爪3331同时来回转动,晃动透明软袋100,可液体内的异物产生位置变化,便于检测机构拍摄,提高检测精度。
46.如图7
‑
8,第一夹持装置332包括横向等距排布多个第一夹爪3323,每一第一夹爪3323安装有第一外齿轮33231,两个相邻第一夹爪3323上的第一外齿轮33231啮合;第一驱
动电机3324的转动轴设置第一驱动齿轮,第一驱动齿轮与其中一个第一外齿轮33231啮合。当一个第一夹爪3323转动时,相邻的第一夹爪3323沿反方向转动。相应的第二夹持装置333包括横向等距排布多个第二夹爪3331,每一第二夹爪3331安装一第二外齿轮,相邻第一夹爪3323的第二外齿轮啮合;第二驱动电机3334的转动轴设置第二驱动齿轮33341,第二驱动齿轮33341与其中一第二外齿轮啮合。设置多个夹爪可一次性检测多个透明软袋100。相邻的夹爪通过齿轮啮合方式传动可以仅设置一个驱动电机,利于节省设备制作成本。
47.安装架331包括固定板3311、托板3316、支撑杆3314、丝杠机构和丝杆驱动电机3312。其中,固定板3311设置在第一安装板3321的上侧;托板3316安装在固定板3311的下侧;支撑杆3314竖直设置且位于第一夹持装置332和第二夹持装置333的后方,其两端分别连接固定板3311和托板3316;丝杆3315机构包括设置在固定板3311和托板3316之间的丝杆3315和安装在丝杆3315上的第一丝杆螺帽3317和第二丝杆螺帽3318,第一丝杆螺帽3317与第一安装板3321固定,第二丝杆螺帽3318与第二安装板3332固定;丝杆驱动电机3312安装在固定板3311上并驱动丝杆3315旋转。通过丝杠机构控制第一夹爪3323和第二夹爪3331的竖直间距,可适应不同规格的透明软袋100。
48.安装架331还包括升降导杆3313,升降导杆3313上端与固定板3311固定;第一安装板3321设置套接升降导杆3313的第一导套33211,第二安装板3332设置套接升降导杆3313的第二导套33321。本实施例中,安装架331共设置两个升降导杆3313,两个升降导杆3313对称布置在安装架331的两侧。通过升降导杆3313和导套232滑动配合有利于提高机构稳定性。
49.请参阅图8
‑
11,第二夹爪3331包括轴套10、夹具安装座40、夹具30、推杆20和连接头50。其中,轴套10具有一内腔,用以收容推杆20。夹具安装座40可转动式地安装在轴套10上,其包括相对设置的两个固定轴410,用于安装夹具30。两个夹具30相对设置,每一夹具30具有一枢接部310和分别设置在枢接部310两端的延伸部330和夹持部320,夹持部320向上露出夹爪安装座,其内侧面安装有用于夹持软袋的透明夹块,进行异物检测时,透明夹块不会对沉底异物造成遮挡,利于提高检测精度,在本实施例中,透明夹块为透明玻璃。透明夹块呈长条状,其延伸方向与夹持部320的延伸方向相垂直,将透明夹块设置成长条状可增大夹持面积,避免透明软袋100变形。推杆20可升降地穿设于内腔。连接头50可转动地安装在推杆20的顶端,其两端分别与对应夹具30相连。驱动推杆20下降时,连接头50带动延伸部330向下摆动,夹持部320向中间靠拢,夹紧透明软袋100;推杆20上升时,夹持部320向外侧翻转,夹持机构打开。
50.连接头50包括主体530和第一轴承510。其中,主体530中间具有上下贯通的安装孔以供推杆20穿过。第一轴承510设置在安装孔内壁和推杆20之间。主体530的两侧各设有一对接部,每一对接部具有相对设置的两个延伸臂5310,两个延伸臂5310之间形成对应延伸部330的活动空间。销轴的两端分别连接对应的延伸臂5310,延伸部330设有滑动连接销轴的槽口3310。此外,连接头50还包括轴承端盖520,轴承端盖520安装在主体530的上方并嵌入安装孔,可起到防尘作用。
51.夹具安装座40还包括夹爪轴承座470、固定块440和一对安装板450。其中,夹具30轴承座通过第二轴承420安装在轴套10的外壁;固定块440安装在夹爪轴承座470上,两个安装板450分别安装在固定块440两侧并向上延伸,连接头50位于安装板450之间,两个固定轴
410的两端分别连接对应安装板450。
52.夹具安装座40还包括一升降缓冲垫460,升降缓冲垫460安装在固定块440的上侧并设有供推杆20穿过的通孔。夹持时,连接头50下降。升降缓冲垫460抵接在连接头50和固定块440之间,起到缓冲作用。
53.第二夹爪3331还包括夹爪垫板710,夹爪垫板710安装在夹具30与透明夹块70之间,夹爪垫板710设有匹配夹爪的卡槽,方便安装定位。
54.第二夹爪3331还包括第二外齿轮60,第二外齿轮60套接夹爪轴承座470,设置齿轮可与外部驱动机构配合,进而实现夹具安装座40的转动。检测时,可驱动夹具安装座40旋转摇晃透明软袋内的液体,使得异物在液体内活动。
55.进一步,第二夹爪3331还包括一防水盖430,防水盖430自上向下包覆夹爪轴承座470,利于保护内部元件。
56.如图3
‑
4,拍摄机构31包括相机支架312和安装在相机支架312上的若干相机311,相机311的数量与每一甩动机构33装夹的软袋数量对应。当甩动机构33旋转到拍摄区时,第一夹爪3323和第二夹爪3331停止转动,透明软袋100内液体在惯性作用下仍继续旋转而处于晃动状态,此时相机311在不同时间点对透明软袋100进行多次图像拍摄,并将拍摄图像传输至数据处理及控制单元内,若液体内存在异物,则异物会随着液体的晃动而发生位置变化,因此,若不同时间点的图像上的阴影出现位置变化,则可以判断该阴影为液体内存在的异物。
57.灯检机构3还包括光源32,光源32位于拍摄区远离拍摄机构31的一侧。设置光源32利于提升拍摄效果。
58.进一步,如图1
‑
2,本实用新型还包括电控箱6和机台7,数据处理及控制单元,包括工控机、驱动器、相应的导线、线槽等均设置在电控箱6内;机台7则用于起到支承作用,上料机构2、灯检机构3、下料机构4均安装在机台7上,上料输送线和出料输送线设置在机台7侧边。还有一些领域内常用的标准连接件、转接件、紧固件等,此处不再赘述。
59.该软袋智能灯检机的作业方式如下:
60.1、将待测透明软袋100置于进料输送线1,进料输送线1将透明软袋100送至上料机构2外侧;
61.2、上料机构2的抓手下降抓取对应透明软袋100,旋转驱动机构22带动抓手向上摆转,将透明软袋100送至上料区;
62.3、上料区的甩动机构通过第一夹持装置和第二夹持装置分别夹紧透明软袋100的上下端,上料机构2的抓手释放透明软袋100;
63.4、旋转支架带动甩动机构公转(以图4为例,甩动机构以中心转轴为轴心做逆时针运动),同时第一夹爪和第二夹爪带动透明软袋100做往复自转运动;
64.5、甩动机构转动至到达拍摄区,第一夹爪和第二夹爪停止转动,透明软袋100内液体在惯性作用下仍继续旋转而处于晃动状态,此时相机311在不同时间点对透明软袋100进行多次图像拍摄,并将拍摄图像传输至数据处理及控制单元内,若液体内存在异物,则异物会随着液体的晃动而发生位置变化,因此,若不同时间点的图像上的阴影出现位置变化,则可以判断该阴影为液体内存在的异物;
65.6、拍摄结束后,旋转支架继续转动,甩动机构移动至下料区,下料机构4将检测完
毕的透明软袋100移送至出料输送线5,结束异物检测工序。
66.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。