1.本实用新型涉及起重机吊具技术领域,尤其是涉及一种可自动回零的旋转吊具。
背景技术:
2.目前在起重机行业中,广泛使用旋转吊具,而对于物件放置角度能够基本确定的吊装工作,手动操纵旋转吊具时容易引起偏差,需要多次纠正旋转位置,重复性工作较多,存在安全隐患;例如,在依次吊装多个集装箱到货场时,由于集装箱排列整齐,吊具对应每个集装箱的起吊角度相同,但是到货场的集装箱放置角度可能根据场地限制各有不同,如果在吊具完成每一次吊装返回时,都需要手动调整吊具角度回零,将大大降低起吊效率,特别是针对大型的起吊设备,因为装配误差大,控制精度不高,更加难以调整回零。
技术实现要素:
3.为了克服背景技术中的不足,本实用新型公开了一种可自动回零的旋转吊具,通过吊具旋转回零,保证吊装物件角度定位准确,提高了作用效率。
4.为实现上述发明目的,本实用新型采用如下技术方案:
5.一种可自动回零的旋转吊具,包含回零控制系统、上吊具、下吊具和旋转机构;所述上吊具的下表面中央和下吊具的上表面中央分别固定有相互对应的上安装盘和下安装盘,所述旋转机构包含具有带齿外圈的回转支撑,以及通过齿轮驱动带齿外圈转动的旋转电机,所述旋转电机机壳和回转支撑的内圈相应端面分别与上安装盘固定连接,所述回转支撑的外圈相应端面与下安装盘固定连接;所述回零控制系统包含plc控制器、上位机,以及分别与旋转电机连接的旋转变频器和旋转编码器,所述plc控制器分别与上位机、旋转变频器和旋转编码器信号连接,所述plc控制器还连接有用于校验下吊具回零位置的回零检测装置和用于校验下吊具回零延时的延时检测装置。
6.进一步,所述上位机设有操作界面、左旋按钮、右旋按钮和回零按钮。
7.进一步,所述回零检测装置包含倒u形卡件、挡杆和与plc控制器信号连接的槽型光电传感器,所述下安装盘的上盘面外缘设有环形卡槽,所述倒u形卡件的一侧卡板对应插接于环形卡槽中,所述倒u形卡件的另一侧卡板板面中央设有螺纹孔,所述螺纹孔中配设有对应下安装盘外环面的紧定螺钉,所述倒u形卡件的另一侧卡板外板面下端与水平档杆的一端固定连接,所述档杆的另一端与槽型光电传感器的槽口对应,所述槽型光电传感器通过连接架固定于上安装盘的外环面。
8.进一步,所述延时检测装置设为安装于下吊具侧面,并用于对地测距的激光测距仪。
9.进一步,所述上吊具和下吊具分别设有相互对应的上悬梯和下悬梯。
10.由于采用如上所述的技术方案,本实用新型具有如下有益效果:
11.本实用新型公开的可自动回零的旋转吊具,通过旋转变频器控制使下吊具旋转更加平稳,控制精度更高,利用上位机提前设定目标角度,通过旋转编码器记录信息,在接近
目标位置时能够减速停止旋转来减少晃动,在下吊具快速抓取被吊物起吊后,通过plc控制器设定延时时间使下吊具快速旋转回到零位,将被吊物送至终点后完成一个工作循环,下吊具自动回转到零位过程不需人工干预、不占用整个工作循环的时间,完全由plc控制器内部编程实现,每次完成一次作业快速回到零位,操作简单可靠;且通过设置回零检测装置和延时检测装置进行校验,从而大大提高了工作安全性和精确性。
附图说明
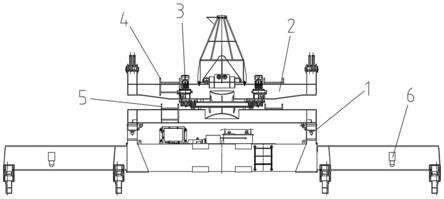
12.图1是本实用新型的实施结构示意图;
13.图2是所述回零控制系统的示意框图;
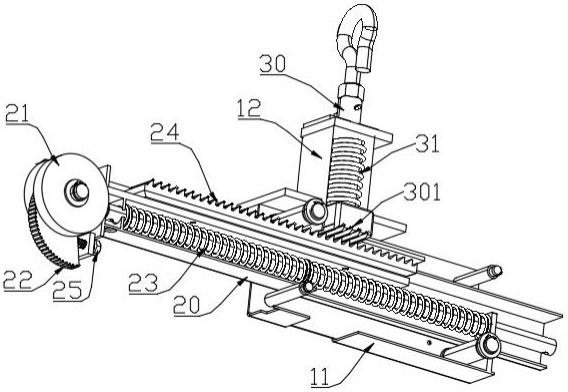
14.图3是所述回零检测装置的结构示意图。
15.图中:1、下吊具;2、上吊具;3、旋转电机;4、上悬梯;5、下悬梯;6、激光测距仪;7、上安装盘;8、连接架;9、倒u形卡件;10、槽型光电传感器;11、下安装盘;12、环形卡槽;13、紧定螺钉;14、挡杆。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型的技术方案进行说明,在描述中,需要理解的是,若有术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系,仅是与本实用新型的附图对应,为了便于描述本实用新型,而不是指示或暗示所指的装置或元件必须具有特定的方位:
17.结合附图1
‑
3所述的可自动回零的旋转吊具,回零控制系统、上吊具2、下吊具1和旋转机构;上吊具2的下表面中央和下吊具1的上表面中央分别固定有相互对应的上安装盘7和下安装盘11,旋转机构包含具有带齿外圈的回转支撑,以及通过齿轮驱动带齿外圈转动的旋转电机3,旋转电机3机壳和回转支撑的内圈相应端面分别与上安装盘7固定连接,回转支撑的外圈相应端面与下安装盘11固定连接,保证上安装盘7、下安装盘11和回转支撑能够同轴对应,当旋转电机3启动时,能够带动下吊具1相对于上吊具2进行旋转动作,从而改变吊装物体的吊装角度;
18.回零控制系统包含plc控制器、上位机,以及分别与旋转电机3连接的旋转变频器和旋转编码器,plc控制器分别与上位机、旋转变频器和旋转编码器信号连接,通过旋转变频器控制使下吊具1旋转更加平稳,控制精度更高,利用上位机提前设定目标角度,通过旋转编码器记录信息,在接近目标位置时能够减速停止旋转来减少晃动,在下吊具1快速抓取被吊物起吊后,通过plc控制器设定延时时间使下吊具1快速旋转回到零位,将被吊物送至终点后完成一个工作循环,下吊具1自动回转到零位过程不需人工干预、不占用整个工作循环的时间,完全由plc控制器内部编程实现,每次完成一次作业快速回到零位,操作简单可靠;根据需要,上位机设有操作界面、左旋按钮、右旋按钮和回零按钮,操作界面用于输入吊装物体的位置和角度信息,左旋按钮和右旋按钮分别用于控制旋转电机正反转,回零按钮能够随时对被吊物体进行旋转回零,不需要经过延时;
19.plc控制器还连接有用于校验下吊具1回零位置的回零检测装置和用于校验下吊具1回零延时的延时检测装置;根据需要,回零检测装置包含倒u形卡件9、挡杆14和与plc控制器信号连接的槽型光电传感器10,下安装盘11的上盘面外缘设有环形卡槽12,倒u形卡件
9的一侧卡板对应插接于环形卡槽12中,倒u形卡件9的另一侧卡板板面中央设有螺纹孔,螺纹孔中配设有对应下安装盘11外环面的紧定螺钉13,倒u形卡件9的另一侧卡板外板面下端与挡杆14的一端固定连接,挡杆14的另一端与槽型光电传感器10的槽口对应,槽型光电传感器10通过连接架8固定于上安装盘7的外环面;当初次设置被吊物体的回零位置时,往往还是需要手动操纵旋转吊具,多次调节到合适位置,比较麻烦,由于下安装盘11与被吊物体相对静止,通过调整倒u形卡件9在环形卡槽12中的位置,能够确定被吊物体需要被转动的相对角度,当启动电机转动后,一旦水平的挡杆14转动到槽型光电传感器10的槽口中,触发槽型光电传感器10,plc控制器就能够通过旋转编码器记录到被吊物体的归零位置,从而提高了效率,并且在长时间往返吊装物体时,也能够通过回零检测装置对归零位置进行实时校正;此外,延时检测装置设为安装于下吊具1侧面并用于对地测距的激光测距仪6,设置延时主要是保证下吊具1在起升到一定高度后,再旋转,防止碰撞,利用激光测距仪6能够对下吊具1的起升高度进行校验,保证起吊安全;此外,上吊具2和下吊具1分别设有相互对应的上悬梯4和下悬梯5,便于操作员通过上悬梯4和下悬梯5对倒u形卡件9的位置进行调整。
20.本实用新型未详述部分为现有技术,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型;因此,无论从哪一点来看,均应将上述实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。