1.本实用新型属于自行走设备技术领域,特别是一种侧活动挡边结构和自行走设备。
背景技术:
2.自行走设备是一种能够在道路和户外连续的、实时的自主移动的智能机器人。智能割草机器人作为自行走设备的一种,适用于清理丘陵、梯田、平原等地块的植被,以及草坪之内的杂草。割草机器人由于底部设置有切割件,因此对于其外壳下边缘离地高度具有一定要求,过高的离地高度会增加割草机器人的危险性,例如小孩手臂可能会伸入割草机器人底部,造成人体伤害;过低的离地高度会导致割草机器人通过性变差。
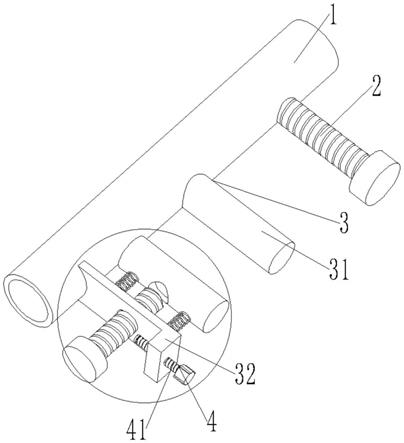
3.如图1和2所示,为了提高原有机器的安全性,有现有技术在机壳1两侧设置有侧附加件2,侧附加件2固定连接于机壳1上,减小机壳1下边缘离地高度,防止物体、人手臂从侧部伸入机器底侧。但此种方案,机壳1下边缘离地高度较低,导致机器通过性不好。
技术实现要素:
4.本实用新型针对自行走设备如何平衡安全性和通过性的问题,提出一种侧活动挡边结构和自行走设备,活动挡边结构下边缘离地高度可以在遇到地面障碍物时增大,在保证通过性的同时,避免物体从机器侧边伸入。
5.实现本实用新型目的的技术解决方案为:
6.一种侧活动挡边结构,所述侧活动挡边结构设置于自行走设备的侧部,所述自行走设备包括机壳,
7.所述侧活动挡边结构包括侧挡边,在第一状态下,所述侧挡边能够保持在第一高度,在第二状态下,所述侧挡边能够上升至高于所述第一高度的第二高度,在所述第一状态下,所述侧挡边的下边缘距离地面最近。
8.进一步地,所述侧活动挡边结构包括两组,两组所述侧活动挡边结构对称安装于所述自行走设备的两侧。
9.进一步地,所述侧活动挡边结构还包括侧安装座和弹性组件,所述侧安装座位于所述机壳内侧,所述侧挡边位于所述侧安装座与机壳之间,所述弹性组件用于在所述第一状态下使得所述侧挡边保持在第一高度,所述弹性组件能够使得所述侧挡边自第二高度自动复位至第一高度。
10.进一步地,所述弹性组件包括开设于侧安装座上的调节槽、位于调节槽顶部的侧挡边连接座、弹簧、位于侧挡边顶端的能够在调节槽内上下移动的凸台,所述弹簧位于所述调节槽内,弹簧的顶端抵靠于侧挡边连接座、底端与所述凸台接触。
11.进一步地,所述弹性组件还包括绳索,所述绳索的上端与侧挡边连接座连接、下端与所述凸台连接。
12.进一步地,所述侧挡边顶端还设置有用于限定上极限位置的限位凸起,当所述侧
挡边上升至上极限位置时所述限位凸起被侧安装座限位。
13.进一步地,所述弹性组件包括设置于侧挡边上的滑动腔、设置于侧安装座上与所述滑动腔配合的轨道腔和弹簧,所述滑动腔套嵌于所述轨道腔内,滑动腔顶部开口,所述弹簧设置于滑动腔和轨道腔的内部,弹簧上端接触轨道腔顶部、下端接触滑动腔底部。
14.进一步地,滑动腔内设置有限位柱,弹簧套设于所述限位柱外,当所述侧挡边上升至上极限位置时所述限位柱被所述轨道腔顶部限位。
15.进一步地,所述侧挡边与侧安装座之间设置导向装置,所述导向装置包括设置于侧安装座上的导向槽和定位柱、设置于侧挡边上的滚轮和滑动槽,所述滚轮与导向槽相配合,所述定位柱伸入所述滑动槽设置,所述定位柱穿出所述滑动槽的部分设置有限位头,所述限位头的宽度大于滑动槽宽度。
16.进一步地,所述侧挡边下部朝向自行走设备前进方向的一端设置有倒角或圆角。
17.进一步地,所述侧安装座下端设置有清洁件,清洁件上设置有清洁条,所述清洁条与侧挡边侧部接触,当侧挡边上下移动时,所述清洁条能够对侧挡边侧边进行清理。
18.进一步地,在第一状态下,所述侧挡边下部低于机壳下边缘。
19.一种自行走设备,所述自行走设备包括上述的侧活动挡边结构。
20.进一步地,所述自行走设备是智能割草机。
21.本实用新型与现有技术相比,其显著优点是:
22.(1)本实用新型在机器两侧设置有侧活动挡边,侧活动挡边下端离地高度可以调节;
23.(2)两侧活动挡边在遇到地面障碍物时可以向上升起,提升通过性,同时,两侧活动挡边在遇到侧部伸入的物体时,不会向上移动,防止物体、人手臂等从机器侧部伸入机器底侧,提高安全性;
24.(3)本实用新型侧活动挡边结构包括专门设计的弹性组件和限位装置,实现两个状态的自动切换和复位,结构设计简单合理,运行稳定可靠。
附图说明
25.图1是现有技术中割草机器人结构示意图。
26.图2是现有技术中割草机器人结构分解图。
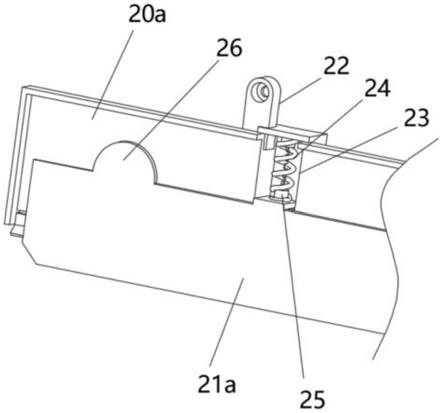
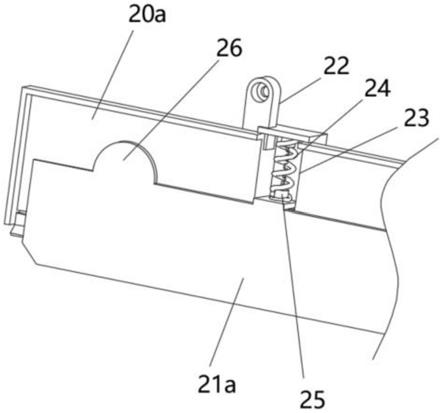
27.图3是本实用新型侧活动挡边结构第一实施方式结构拆分图。
28.图4是本实用新型侧活动挡边结构第一实施方式结构示意图。
29.图5是本实用新型侧活动挡边结构第一实施方式清洁件结构和安装示意图。
30.图6是本实用新型侧活动挡边结构第二实施方式安装示意图。
31.图7是本实用新型侧活动挡边结构第二实施方式内侧视角结构示意图。
32.图8是本实用新型侧活动挡边结构第二实施方式外侧视角结构示意图。
33.图9是本实用新型侧活动挡边结构第二实施方式导向装置结构示意图。
34.图10是本实用新型侧活动挡边结构第二实施方式结构分解示意图。
35.图11是本实用新型侧活动挡边结构第二实施方式结构分解示意图。
36.图12是本实用新型侧活动挡边结构第二实施方式第二弹性组件结构剖视图。
37.附图标记:1、机壳;2、侧附加件;20a、20b均为侧安装座;21a、21b均为侧挡边;22、
侧挡边连接座;23、调节槽;24、弹簧;25、连接索链;26、限位凸起;27、清洁件;28、清洁条;29、滑动腔;30、盖体;31、导向槽;32、滚轮;33、定位柱;34、限位头;35、滑动槽;36、轨道腔;37、限位柱。
具体实施方式
38.下面将结合实施例对本实用新型的优选实施方式进行详细说明。需要理解的是以下实施例的给出仅是为了起到说明的目的,并不是用于对本实用新型的范围进行限制。本领域的技术人员在不背离本实用新型的宗旨和精神的情况下,可以对本实用新型进行各种修改和替换,均属于本实用新型的范围。
39.本实用新型的活动挡边结构适用于多种自行走设备,以下实施例以割草机器人为例详细说明。
40.实施例1
41.如图3
‑
5所示为一种侧活动挡边结构,其包括设置在机壳1内侧的侧安装座20a,侧安装座20a和机壳1之间设置有侧挡边21a,侧安装座20a上设置有调节槽23,调节槽23顶部的设置有侧挡边连接座22,侧挡边21顶端设置有可在调节槽23内上下移动的凸台,同时调节槽23内还设置有弹簧24推动侧挡边21a始终保持向下的势能,弹簧24的顶端抵靠于侧挡边连接座22、底端与所述凸台接触,侧挡边21a不受力时(即第一状态),侧挡边下端低于机壳1下边缘,侧挡边顶端还设置有限位凸起26,用于限定上极限位置。机器在前进过程中,当遇到前方障碍物时,障碍物抵触侧挡边21a并将侧挡边向上推起(即第二状态)。但由于侧挡边21a位于侧安装座20a和机壳1之间,因此当侧边21a有物体接近机器侧面时,侧挡边21a不会被推起,可以将接近物体阻挡在机壳1外。如图7
‑
8,侧挡边21a下部朝向机器前进方向一端设置有倒角或者圆角,使其在接触到障碍物时,可以平滑向上运动。
42.如图4所示,为了使侧挡边21a运行跟稳定,可以将侧挡边21a顶部凸台与调节槽23顶端通过连接索链25相互连接。如图5所示,在侧安装座20a下端设置有清洁件27,清洁件27上设置有清洁条28,清洁条28可以是毛刷、橡胶条等,清洁条28接触侧挡边21a侧部,当侧挡边21a上下移动时,对侧挡边侧边进行清理,同时也防止砂石等进入侧安装座内引起卡顿。
43.实施例2
44.如图6
‑
12所示为另一种侧活动挡边结构,其包括设置在机壳1内侧的侧安装座20b,侧安装座20b和机壳1之间设置有侧挡边21b。侧安装座20b和侧挡边21b上设置有互相配合的轨道腔36和滑动腔29,滑动腔29套嵌在轨道腔36内,侧挡边21b侧部设置有盖体30,滑动腔29顶部开口,同时滑动腔29内部设置有弹簧24,弹簧24上端接触轨道腔36顶部,下端接触滑动腔29底部,在弹簧24作用下,侧挡边21b始终保持向下的势能。机器在前进过程中,侧挡边21b不受力时(即第一状态),侧挡边下端低于机壳1下边缘,当遇到前方障碍物时,障碍物抵触侧挡边21b并将侧挡边向上推起(即第二状态)。但由于侧挡边21b位于侧安装座20b和机壳1之间,因此当侧边有物体接近机器侧面时,侧挡边不会被推起,可以将接近物体阻挡在机壳1外。侧挡边下部朝向机器前进方向一端设置有倒角或者圆角,使其在接触到障碍物时,可以平滑向上运动。
45.结合图9,为了保证侧挡边21b可以相对平稳的运动,可以在侧挡边21b与侧安装座20b之间设置导向装置,例如导向槽31和滚轮32、定位柱33和滑动槽35等。定位柱33除了起
到滑动导向的作用,还可以在定位柱33端部设置限位头34,限位头34宽度大于滑动槽35宽度,限位头34用于限定侧挡边21a水平方向位置,使其贴附侧安装座20b。滑动腔29内设置有限位柱37,限位柱37用于定位弹簧24,同时还有限定侧挡边21b上极限位置的作用。
46.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。