1.本实用新型涉及一种波浪浮标或波浪传感器检测装置。特别是涉及一种基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统。
背景技术:
2.波浪是海洋水文观测的基本要素之一,波浪观测资料的准确与否,对海洋工程、海上交通、海洋渔业、海洋研究及海洋军事活动等都有重大影响。
3.监测波浪,目前主要有人工目测和仪器测量两种方式。人工目测时,观测员目测并评估海况、海浪外貌特征,判读波高、波周期与波向等波浪场数值,此种方式对人员技能要求较高。仪器测量方式选用波浪浮标仪器观测波浪参数,波浪浮标测量技术主要有重力加速度式、压力式、声学式等,其中重力加速度式波浪浮标,是目前对波浪进行长期、定时、定点观测的主要设备。我国沿海海域布放了几百台套波浪浮标,用于时刻监测我国海域波浪场数据。
4.为保证波浪场监测数据的准确可靠,需要定期(一般为一年)对重力加速度式波浪传感器进行检测。
5.国家海洋标准计量中心2004年建立了双环桁架式波浪浮标检定装置,可检测直径(0.5~1.0)m、质量小于180kg的波浪浮标或波浪传感器。检测试验时,首先将波浪浮标或波浪传感器加装在桁架一端的卡具上,然后完成桁架动平衡调配工作,即将适量平衡重块固定在桁架另一端,实现当桁架打开刹车部件、处于自由状态、旋转至任意位置时,波浪浮标或波浪传感器与平衡重块绕旋转中心保持平衡不动,接着控制系统控制桁架以指定的转速匀速旋转,完成检测工作。
6.国内外已公布多种波浪浮标或波浪传感器检测装置专利技术。国内的有自升降式测波浮标模拟试验装置(cn201420110403_cn203759964u_cn)和波/潮测试检定系统装置及其应用(cn201210311099_cn102829799a_cn),国外方面有美国发布的waverider buoy accelerometer calibration testing device(专利号us4158956a)、韩国发布的a calibration device for wave height of ocean(专利号kr20170139468)。以上专利部分
技术实现要素:
相似且方法雷同,均是采用控制器控制电机转动,驱动连接件(钢丝绳或尼龙绳)伸缩,模拟海面起伏,从而实现与连接件(钢丝绳或尼龙绳)相连的波浪浮标或波浪传感器升降运动。模拟海面上升时,竖直拉升波浪浮标,模拟海面下降时,利用波浪浮标自重下降或利用钢丝绳向下拖动。或者采用类似跷跷板原理,跷跷板一侧安装波浪浮标,另一侧装载配重,模拟波浪升降运动。
7.以上检测技术为保证我国波浪量值准确性起到一定作用,但也存在一定问题,具体如下:
8.(1)目前现有检测装置波高范围较小,最大仅可模拟3m波高的波浪,距离实海况时十几米的波高还存在一定差距。
9.(2)目前现有检测装置开展波浪浮标检测时,不能开展波浪全要素(波高、波周期、
波向)检测试验,每次试验最多只能同步开展波高、波周期参数测试,波向参数需要单独进行检测测试。
10.(3)对于加速度大于重力加速度g的波浪升降运动,自升降式测波浮标模拟试验装置无法实现,距离实际海况模拟需求存在一定差距。
11.(4)钢丝绳或尼龙绳具有一定弹性伸缩变化,模拟波高误差较大,精度较低,不能满足推陈出新、升级换代的波浪浮标或波浪传感器技术精度需求。
发明内容
12.本实用新型所要解决的技术问题是,提供一种可采集波浪浮标整机和波浪浮标传感器的全参数(波高、波周期和波向)模拟信号的基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统。
13.本实用新型所采用的技术方案是:一种基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统,包括有能够模拟海面运动姿态用于放置并提供波浪传感器或波浪浮标运动姿态的运动姿态模拟装置,分别连接在所述运动姿态模拟装置两侧用于带动运动姿态模拟装置进行升降运动的丝杠驱动机构,连接在所述丝杠驱动机构一侧用于读取运动姿态模拟装置在所述丝杠驱动机构的驱动下升降数据的光栅尺装置,连接在所述丝杠驱动机构另一侧用于检测运动姿态模拟装置升降运动时零点位置的光电开关机构,通过导线连接丝杠驱动机构和无线连接运动姿态模拟装置的用于控制丝杠驱动机构和运动姿态模拟装置的姿态模拟的控制开关,分别连接丝杠驱动机构、运动姿态模拟装置、光栅尺装置和光电开关机构的信号输出端用于采集光栅尺装置的读数和运动姿态模拟装置的运动姿态状况信号的信号采集装置。
14.本实用新型的基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统,结构简洁、原理清晰、功能齐全,并且方便装卸,节省大量人力物力,每次检测试验可大幅度降低能源消耗。本实用新型可实现波浪浮标整机和波浪传感器的全参数(波高、波周期和波向)检测校准,完成量值传递工作。可实现最大20m的波高、最小1s的波周期、全波向波浪的海况模拟,可实现最大加速度1.5g的波浪模拟,填补国内外技术空白。
附图说明
15.图1是基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统第一实例的结构示意图;
16.图2是本实用新型中六自由度平台的结构示意图;
17.图3是图2中固定底座、转动电机、旋转轴和a轴机构的整体结构示意图;
18.图4是a轴机构的俯视图;
19.图5是图2中b轴机构与试验平台机构的整体结构示意图;
20.图6是b轴机构的俯视图;
21.图7是试验平台机构的结构示意图;
22.图8是基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统第二实例的结构示意图。
23.其中
24.1:滚柱丝杠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2:丝杠旋块
25.3:固定轴承
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4:顶部固定模块
26.5:直线导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6:导轨滑块
27.7:底部固定模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8:伺服电机
28.9:光栅尺
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10:光栅尺限位高点
29.11:光栅尺限位低点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12:信号采集装置
30.13:控制开关
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15:试验托盘
31.16:波浪传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17:六自由度平台
32.18:锂电池
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
19:旋转编码器
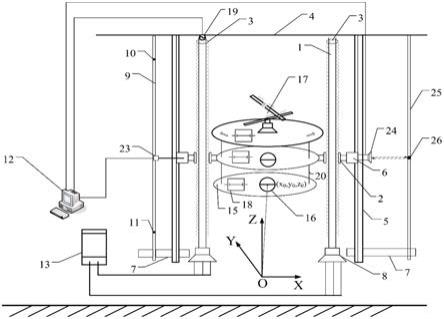
33.20:连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21:波浪浮标
34.22:支撑环
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23:读数头
35.24:光电开关
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25:光电开关反射板固定架
36.26:光电开关反射板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
a:a轴机构
37.b:b轴机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1701:固定底座
38.1702:转动电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1703:旋转轴
39.1704:a轴槽钢
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1705:a轴直线导轨
40.1706:a轴滚珠丝杠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1707:a轴直线导轨滑块
41.1708:a轴丝杠驱动电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1709:a轴旋转编码器
42.1710:a轴光栅尺
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1711:a轴光栅尺读数头
43.1712:b轴槽钢
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1713:b轴直线导轨
44.1714:b轴滚珠丝杠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1715:b轴直线导轨滑块
45.1716:b轴丝杠驱动电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1717:b轴旋转编码器
46.1718:b轴光栅尺
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1719:b轴光栅尺读数头
47.1720:试验平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1721:磁通门罗盘
48.1722:数据收发模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1723:摇摆电机
49.1724:试验平台旋转编码器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1725:b轴丝杠旋块
50.1726:电机支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1727:连接支架
51.1728:第一连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1729:a轴丝杠旋块
52.1730:第二连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1731:第三连接件
53.1732:第四连接件
具体实施方式
54.下面结合实施例和附图对本实用新型的基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统做出详细说明。
55.本实用新型的基于丝杠和直线导轨的波浪浮标或传感器模拟采集系统,选用并竖直安装高强度丝杠和高精度直线导轨,设计机械支撑结构,采用伺服电机和变频驱动器,大幅提升波浪模拟范围,符合波浪浮标或波浪传感器测量原理,可实现波浪浮标或波浪传感器的波高、波周期检测需求;设计六自由度平台,可实现波浪传感器的全参数(波高、波周期和波向)检测需求,满足波浪传感器检测工作需求。机械部件选用铝、无磁钢、无磁合金等无
磁材料,电气部件进行电磁屏蔽,检测系统工作时不干扰地球磁场环境,满足波向检测需求。
56.如图1所示,本实用新型的基于丝杠和直线导轨的波浪浮标或波浪传感器模拟采集系统,包括有能够模拟海面运动姿态用于放置并提供波浪传感器16或波浪浮标21运动姿态的运动姿态模拟装置,分别连接在所述运动姿态模拟装置两侧用于带动运动姿态模拟装置进行升降运动的丝杠驱动机构,连接在所述丝杠驱动机构一侧用于读取运动姿态模拟装置在所述丝杠驱动机构的驱动下升降数据的光栅尺装置,连接在所述丝杠驱动机构另一侧用于检测运动姿态模拟装置升降运动时零点位置的光电开关机构,通过导线连接丝杠驱动机构和无线连接运动姿态模拟装置的用于控制丝杠驱动机构和运动姿态模拟装置的姿态模拟的控制开关13,分别连接丝杠驱动机构、运动姿态模拟装置、光栅尺装置和光电开关机构的信号输出端用于采集光栅尺装置的读数和运动姿态模拟装置的运动姿态状况信号的信号采集装置12。
57.如图1所示,所述的运动姿态模拟装置包括有:用于放置波浪传感器16或波浪浮标21的2个以上的试验托盘15,所述2个以上的试验托盘15通过连接杆20上下依次连接,每个试验托盘15上都设置有用于供电的锂电池18,最上面一个试验托盘15上设置有一个六自由度平台17,被测波浪传感器16或波浪浮标21放置在所述六自由度平台17上,其余试验托盘15上均直接放置波浪传感器16或波浪浮标21,每个波浪传感器16或波浪浮标21的信号输出端都通过无线连接方式连接至所述信号采集装置12的信号接收端,2个以上试验托盘15中的位于中间的一个试验托盘15的两侧分别连接丝杠驱动机构,并在丝杠驱动机构的驱动下带动所有试验托盘15进行上下移动。
58.如图2所示,所述的六自由度平台17包括有设置在试验托盘15上的固定底座1701,安装在所述固定底座1701上的转动电机1702,连接在所述转动电机1702的旋转轴1703上并随旋转轴1703进行水平方向旋转的a轴机构a,连接在所述a轴机构a上并能够沿所述a轴机构a长度方向进行移动的b轴机构b,设置在所述b轴机构b上并能够沿所述b轴机构b长度方向进行移动的试验平台机构,所述试验平台机构上放置有波浪传感器16或波浪浮标21和磁通门罗盘1721,所述固定底座1701上还设置有用于与控制开关13进行无线数据通信的数据收发模块1722,所述数据收发模块1722用于接收控制开关13发出的无线控制信号,并将所述的控制信号无线转发给对应的转动电机1702、a轴机构a、b轴机构b和试验平台机构,所述数据收发模块1722还接收a轴机构a、b轴机构b和试验平台机构发出的无线信号并无线转发给信号采集装置12,所述数据收发模块1722对所有接收和发送数据进行存储。
59.如图3、图4所示,所述的a轴机构a包括有底部与所述旋转轴1703固定连接的a轴槽钢1704,沿a轴槽钢1704的长度方向设置在a轴槽钢1704内的a轴直线导轨1705,滑动的连接在a轴直线导轨1705上的a轴直线导轨滑块1707,所述的b轴机构b通过连接支架1727连接在所述a轴直线导轨滑块1707上,所述a轴直线导轨1705的一侧面平行设置有a轴光栅尺1710,a轴光栅尺1710上的a轴光栅尺读数头1711通过第一连接件1728连接所述的a轴直线导轨滑块1707,所述a轴直线导轨1705的另一侧设置有a轴滚珠丝杠1706,连接在所述a轴滚珠丝杠1706上的a轴丝杠旋块1729通过第二连接件1730连接所述的a轴直线导轨滑块1707,a轴丝杠旋块1729用于驱动a轴直线导轨滑块1707沿所述a轴直线导轨1705直线移动,所述a轴滚珠丝杠1706的一端连接a轴丝杠驱动电机1708,另一端连接a轴旋转编码器1709,所述a轴光
栅尺读数头1711、a轴丝杠驱动电机1708和a轴旋转编码器1709均无线连接数据收发模块1722。
60.如图3、图5、图6所示,所述的b轴机构b包括底部通过连接支架1727连接在a轴机构a中的a轴直线导轨滑块1707上的b轴槽钢1712,沿b轴槽钢1712的长度方向设置在b轴槽钢1712内的b轴直线导轨1713,滑动的连接在b轴直线导轨1713上的b轴直线导轨滑块1715,所述的试验平台1720通过电机支架1726连接在所述b轴直线导轨滑块1715上,所述b轴直线导轨1713的一侧平行设置有b轴光栅尺1718,b轴光栅尺1718上的b轴光栅尺读数头1719通过第三连接件1731连接所述的b轴直线导轨滑块1715,所述b轴直线导轨1713的另一侧设置有b轴滚珠丝杠1714,连接在所述b轴滚珠丝杠1714上的b轴丝杠旋块1725通过第四连接件1732连接所述的b轴直线导轨滑块1715,用于驱动b轴直线导轨滑块1715沿所述b轴直线导轨1713直线移动,所述b轴滚珠丝杠1714的一端连接b轴丝杠驱动电机1716,另一端连接b轴旋转编码器1717,所述b轴光栅尺读数头1719、b轴丝杠驱动电机1716和b轴旋转编码器1717均无线连接数据收发模块1722。
61.如图5、图7所示,所述的试验平台机构包括有用于放置波浪传感器16或波浪浮标21和磁通门罗盘1721的试验平台1720,所述试验平台1720的一侧连接在摇摆电机1723的输出轴上,与该侧相对应的另一侧设置有试验平台旋转编码器1724,所述的摇摆电机1723通过电机支架1726连接b轴机构b中的b轴直线导轨滑块1715,所述磁通门罗盘1721、摇摆电机1723和试验平台旋转编码器1724均无线连接数据收发模块1722。
62.如图1、图8所示,所述的丝杠驱动机构包括有对应设置在所述运动姿态模拟装置两侧的两根滚柱丝杠1和分别设置在所述两根滚柱丝杠1外侧的两根直线导轨5,两根滚柱丝杠1上的丝杠旋块2的一侧分别与运动姿态模拟装置中的用于放置波浪传感器16或波浪浮标21的一个试验托盘15的两侧边相连接,两根滚柱丝杠1上的丝杠旋块2的另一侧分别对应与相邻的直线导轨5上的导轨滑块6相连接,所述两根滚柱丝杠1的下端分别连接一台用于驱动滚柱丝杠1旋转的伺服电机8,两台所述的伺服电机8均通过导线连接控制开关13,两根所述的滚柱丝杠1的顶端各通过一个固定轴承3连接在顶部固定模块4上,其中一根滚柱丝杠1的顶端连接一个旋转编码器19,所述旋转编码器19的信号输出端连接所述信号采集装置12,两根所述的直线导轨5的下端均固定连接在底部固定模块7上,上端固定连接在顶部固定模块4上;所述的光栅尺装置包括有平行设置在一根直线导轨5外侧的光栅尺9,光栅尺9的读数头23连接该直线导轨5上的导轨滑块6,用于采集导轨滑块6沿直线导轨5竖直移动的位移数据,所述读数头23的信号输出端连接所述信号采集装置12,所述光栅尺9的上端固定连接在顶部固定模块4上,下端固定连接在底部固定模块7上,所述光栅尺9上分别设置有光栅尺限位高点10和光栅尺限位低点11。光栅尺9的读数头23可在光栅尺9上滑动精密测量,给出竖直上升或下降运动位移即波高的精密数值。
63.如图1所示,所述的光电开关机构包括有固定连接在丝杠驱动机构中的导轨滑块6外侧的用于检测波浪传感器16或波浪浮标21升降运动时零点位置的光电开关24,以及固定设置在光电开关反射板固定架25上的用于触发光电开关24的光电开关反射板26,所述光电开关反射板固定架25的上端固定连接在顶部固定模块4上,下端固定连接在底部固定模块7上,所述光电开关24的信号输出端连接信号采集装置12。
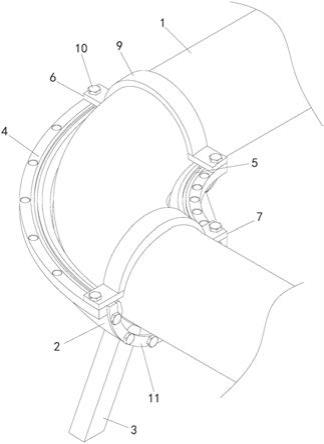
64.如图8所示,当所述的运动姿态模拟装置只用于放置并检测波浪浮标21时,包括
有:用于支撑所述波浪浮标21的支撑环22,所述支撑环22的两侧分别连接丝杠驱动机构,并在丝杠驱动机构的驱动下带动所述波浪浮标21进行升降移动。此时,所述的丝杠驱动机构包括有对应设置在所述支撑环22两侧的两根滚柱丝杠1和分别设置在所述两根滚柱丝杠1外侧的两根直线导轨5,两根滚柱丝杠1上的丝杠旋块2的一侧分别与用于支撑波浪浮标21的支撑环22的两侧边相连接,两根滚柱丝杠1上的丝杠旋块2的另一侧分别对应与相邻的直线导轨5上的导轨滑块6相连接,所述两根滚柱丝杠1的下端分别连接一台用于驱动滚柱丝杠1旋转的伺服电机8,两台所述的伺服电机8均通过导线连接控制开关13,两根所述的滚柱丝杠1的顶端各通过一个固定轴承3连接在顶部固定模块4上,其中一根滚柱丝杠1的顶端连接一个旋转编码器19,所述旋转编码器19的信号输出端连接所述信号采集装置12,两根所述的直线导轨5的下端均固定连接在底部固定模块7上,上端固定连接在顶部固定模块4上;所述的光栅尺装置包括有平行设置在一根直线导轨5外侧的光栅尺9,光栅尺9的读数头23连接该直线导轨5上的导轨滑块6,用于采集导轨滑块6沿直线导轨5竖直移动的位移数据,所述读数头23的信号输出端连接所述信号采集装置12,所述光栅尺9的上端固定连接在顶部固定模块4上,下端固定连接在底部固定模块7上,所述光栅尺9上分别设置有光栅尺限位高点10和光栅尺限位低点11。
65.进行波浪浮标21或波浪传感器16检测试验时,拟模拟的实海况海面运动姿态分为两种:理想波浪姿态和stokes二阶波浪姿态。当模拟理想波浪姿态时,人工向控制开关13输入设定波高、波周期、波向和时长等控制参数,然后控制开关13手动启动伺服电机8输出瞬时加速度和力矩,驱动滚柱丝杠1旋转,丝杠旋块2带动导轨滑块6、试验托盘15和波浪浮标21或波浪传感器16升降运动,实现波浪起伏运动,完成波浪浮标21或波浪传感器16的检测工作。当模拟stokes二阶波浪姿态时,人工向控制开关13输入设定波高、波周期、波向和时长等控制参数,然后控制开关13手动启动伺服电机8输出瞬时加速度和力矩,驱动滚柱丝杠1旋转,丝杠旋块2带动导轨滑块6、试验托盘15和六自由度平台17进行大幅度波浪升降运动,与此同时,控制开关13通过数据收发模块1722向转动电机1702、a轴丝杠驱动电机1708、b轴丝杠驱动电机1716、摇摆电机1723无线输出控制信号,试验平台1720进行小幅度波浪升降运动,两种幅度波浪运动姿态融合,完成波浪浮标21或波浪传感器16的stokes二阶波浪的检测工作。
66.本实用新型中,
67.1、伺服电机,选用:
68.安川公司:型号sgm7g1ea7c6c,15kw;或三菱公司;型号mr
‑
j4
‑
15kw,15kw;
69.2、旋转编码器,选用:
70.欧姆龙公司:型号e6d
‑
cwz1e;或长春衡纬光电有限公司:型号hw58s;
71.3、光栅尺,选用:
72.广州信和光栅数显有限公司:型号ka
‑
300;或heidenhain海德汉公司:型号lc291m;
73.4、磁通门罗盘,选用:
74.湖北麦格森斯科技有限公司:型号ms
‑
03a;或北京华信昊通科技有限公司:型号:cps380t。
75.5、数据收发模块,选用:
76.济南有人物联网技术有限公司:型号usr
‑
g780 v2;黑马物联科技(湖州)有限公司:型号d100
‑
4gb。
77.6、控制开关,选用:
78.上海奕标自动化科技有限公司:型号dkc
‑
y220;娄底市简思工控有限公司:型号sfm
‑
2424a4000 a0。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。