1.本发明涉及一种机械臂控制技术领域,具体涉及一种六轴机械臂过奇异点的控制方法。
背景技术:
2.六轴机械臂具有速度快,移动灵活以及精度高等优点,无论在工业领域还是服务行业中,均起到尤为重要的作用。但是,不管在哪种场合,哪种类型的机械臂,六轴机械臂都面临着过奇异点问题;在奇异点附近,机械臂的逆解有无数个,并且还存在速度无限大、承载能力弱问题。
3.现有技术中,六轴机械臂过奇异点的控制方法很多,其中包括采用纯数学的计算处理,例如求出机械臂位置和速度雅可比矩阵的伪逆,或者利用其它算法求解出逆解;另外,还包括采用直接避开奇异点的方法,在进行机械臂运动轨迹和路径规划时,直接避开可能产生奇异点的位姿。
4.关于以上六轴机械臂过奇异点的控制方法,存在以下问题:无法求出较好的逆解以便于六轴机械臂平稳地通过奇异点,若通过避开奇异点的方式则导致机械臂无法以最优的路径完成作业,并且增加规划计算量,适用范围窄。
技术实现要素:
5.本发明目的在于克服现有技术的不足,提供一种六轴机械臂过奇异点的控制方法,该方法计算简单且计算量小,适用范围广,有利于机械臂快速有效地经过奇异点。
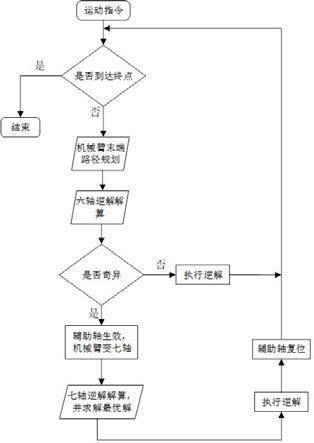
6.本发明的目的通过以下技术方案实现:一种六轴机械臂过奇异点的控制方法,包括以下步骤:(1)在六轴机械臂的最后一个轴臂上增加一个辅助轴;常态下,所述辅助轴与六轴机械臂的最后一个轴臂形成一个整体进行运动;(2)六轴机械臂收到运动指令后,进行末端路径规划,并根据末端位姿进行逆解计算;(3)判断是否经过奇异点;(4)若不存在奇异点,则基于六轴机械臂直接进行逆解计算,按照计算结果完成运动指令;若存在奇异点,则所述辅助轴生效,此时的六轴机械臂转换成七轴机械臂,并通过形成的七轴机械臂完成运动指令。
7.本发明的一个优选方案,在步骤(2)和步骤(3)中,逆解计算和奇异点的判断如下:由正运动学可以得出六轴机械臂末端位姿向量x和关节空间的位置向量q的关系:式中,j为雅可比矩阵,δ为微分符号;则根据公式(1),可以求出六轴机械臂的关节空间向量:
由于雅可比矩阵具有对称性,则有:要使得上述公式(3)有解,即六轴机械臂的逆解有解,则需要满足j
t
满秩,即: ,此时表明不存在奇异点,通过计算直接获得逆解即可;若,且,则表明六轴机械臂即将经过的位姿是奇异点;其中的表示矩阵j
t
的秩,其中的w为六轴机械臂的工作范围。
8.优选地,当存在奇异点,转换为七轴机械臂时,通过能量最优算法求解七轴机械臂逆解的最优解:其中,energy为七轴机械臂本次运动所需要的能量,m
n
为机械臂上第n个轴臂的质量,n 表示第n个轴臂,
∆
q
i
表示七轴机械臂第i个关节在下一时刻与当前时刻的角度差值,min(energy)为七轴机械臂本次运动所需要的最小能量,q
i
为七轴机械臂第i个关节的角度,q
imin
为七轴机械臂第i个关节所能运动到的最小角度,q
imax
为七轴机械臂第i个关节所能运动到的最大角度;通过公式(2)、(4)和(5),即可求解出七轴机械臂最优的逆解,即获得七轴机械臂即将运动的角度数据;此时七轴机械臂执行求解出最优的逆解,按照所述角度数据进行运动,从而使得机械臂平稳顺滑通过奇异点。
9.优选地,当七轴机械臂经过奇异点后,结合辅助轴的复位,继续完成执行后续的运动,从而实现机械臂的运动过程保持平稳连续。
10.本发明与现有技术相比具有以下有益效果:1、本发明通过在六轴机械臂的最后一个轴臂上增加一个辅助轴,以便在遇到奇异点时转换为七轴机械臂,从而快速高效地解决奇异点的问题,能够平稳柔顺地经过奇异点并完成规划路径运动,同时计算量小,建模简单,适用范围广。
11.2、常态下,六轴机械臂的最后一个轴臂与辅助轴形成一个整体,有效地提高作业运动的效率和精度,并且控制方便,降低计算量;当遇到奇异点时,辅助轴才启动,形成七轴机械臂解决奇异点问题,完成奇异点的经过后,又重新转换为六轴机械臂,继续保持常态作业。
附图说明
12.图1为本发明的六轴机械臂过奇异点的控制方法的控制流程框图。
13.图2为六轴机械臂常用的三种构型。
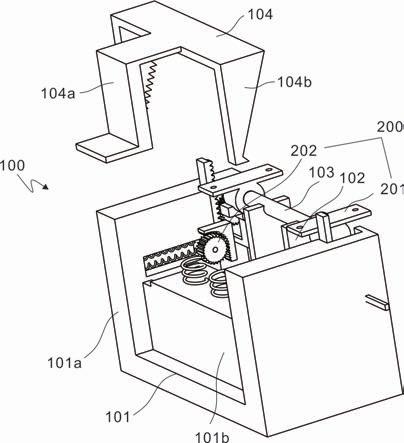
14.图3为针对图2中的六轴机械臂增加辅助轴后的构型图,其中三种构型中的虚线框内容表示增加的辅助轴。
具体实施方式
15.下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
16.参见图1
‑
图3,本实施例的六轴机械臂过奇异点的控制方法,包括以下步骤:(1)在六轴机械臂的最后一个轴臂上增加一个辅助轴;常态下,所述辅助轴与六轴机械臂的最后一个轴臂形成一个整体进行运动;此处的常态,是指常规工作状态下,即六轴机械臂在运动过程中没有遇到奇异点的情况下。根据工作空间、负载和规划轨迹的不同,六轴机械臂分为不同的构型,常用的构型有std型、ur型以及weld型,如图2所示;当然,还有其他各种不常用的构型。在设计六轴机械臂时,一般都会满足pieper准则,因此在设计增加辅助轴时,也应考虑pieper准则,使得求解逆解时更加简单;但是,辅助轴更应该增加六轴机械臂的有效自由度,与pieper准则两者结合,既可以使得机械臂求解逆解更加简单,还会增加六轴机械臂的有效自由度,使得机械臂肯定会有较优的解通过奇异点。综合考虑以上因素,针对不同构型的六轴机械臂,设计不同的辅助轴,具体可参见图3,其中三种构型中的虚线框内容表示增加的辅助轴。对于一些不常用的构型的六轴机械臂,主要是针对最后一个轴臂进行辅助轴的设计,因此可参见图3完成辅助轴的设计。
17.(2)六轴机械臂收到运动指令后,进行末端路径规划,并根据末端位姿进行逆解计算。具体地:由正运动学可以得出六轴机械臂末端位姿向量x和关节空间的位置向量q的关系:式中,j为雅可比矩阵,δ为微分符号;则根据公式(1),可以求出六轴机械臂的关节空间向量:由于雅可比矩阵具有对称性,则有:(3)判断是否经过奇异点。要使得上述公式(3)有解,即六轴机械臂的逆解有解,则需要满足j
t
满秩,即:,此时表明不存在奇异点,通过执行计算直接获得逆解即可。若,则表明六轴机械臂即将经过的位姿是奇异点,或者控制器规划的末端位姿x超出了工作范围;若此时同时满足,则表明六轴机械臂即将经过的位姿是奇异点;其中的表示矩阵j
t
的秩,其中的w表示为六轴机械臂的工作范围。
18.(4)经过判断后,若存在奇异点,则所述辅助轴生效,此时的六轴机械臂转换成七轴机械臂,通过形成的七轴机械臂完成运动指令,平稳柔顺经过奇异点。此时,转换成七轴
机械臂后,需要求解七轴机械臂的逆解,可通过上述公式(1)和公式(2)求解出七个关节角度空间q,但是,此时的j
‑1为7
×
6的矩阵,,因此七轴机械臂的逆解有无数个。为了进一步优化机械臂的运动,通过能量最优算法求解七轴机械臂逆解的最优解:其中,energy为七轴机械臂本次运动所需要的能量,m
n
为机械臂上第n个轴臂的质量,n 表示第n个轴臂,
∆
q
i
表示七轴机械臂第i个关节在下一时刻与当前时刻的角度差值(即第i个关节即将转动的角度),min(energy)为七轴机械臂本次运动所需要的最小能量,q
i
为七轴机械臂第i个关节的角度,q
imin
为七轴机械臂第i个关节所能运动到的最小角度,q
imax
为七轴机械臂第i个关节所能运动到的最大角度;结合公式(2)、(4)和(5),即可求解出七轴机械臂最优的逆解,即获得七轴机械臂即将运动的角度数据;此时七轴机械臂执行求解出最优的逆解,按照所述角度数据进行运动,从而使得机械臂平稳顺滑通过奇异点。
19.当七轴机械臂经过奇异点后,为了降低正常情况下六轴机械臂的控制难度以及下次更好的过奇异点,需要将辅助轴进行复位处理。同时,为了确保机械臂的运动过程能够一直平稳连续,需要在机械臂执行本次规划的运动过程中将辅助轴复位,则此次机械臂的运动仍为七轴运动。在机械臂上一次过奇异点时,机械臂第七轴运动的角度为q7,则此次第七轴运动的角度即为
‑
q7;原来的j
‑1为7
×
6矩阵,但是第七轴的运动的角度已知,所以j
‑1可以化为6
×
6矩阵,即可以求出其他六个轴的运动角度。这样,机械臂执行求解出的逆解,即可实现机械臂在平稳柔顺的执行规划的轨迹过程中,同时完成辅助轴的复位。
20.本实施例的六轴机械臂过奇异点的控制方法,在正常情况下,六轴机械臂的辅助轴保持不动,与最后一个轴臂即第六轴臂固定在一起形成一个整体,机械臂的运动和规划按照普通的六轴机械臂来执行即可,仍然具有六轴机械臂的各种优点。当检测判断到机械臂在约束条件内经过奇异点或者逆解无解时,此时辅助轴生效,机械臂暂时转变为七轴,并通过能量最优算法计算出最优逆解,使得机械臂能够平稳柔顺通过奇异点。与此同时,在之后的运动中,结合辅助轴的复位,重新固定不动和第六轴成为一个整体,继续执行下一步骤。
21.上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。