1.本发明涉及光学技术领域,特别涉及一种自动调焦系统。
背景技术:
2.随着现代工业对镜头的解析度向微米、亚微米、纳米方向发展,镜头的焦深(depth of focus)也越来越小,现代工业对生产效率的要求也越来越高,辅助成像的自动聚焦系统应运而生。
3.自动聚焦技术大体分为两类:第一类直接计算被成像物体的影像对比度,寻找对比度最高的镜头位置;第二类需要专门的自动聚焦系统。第一类需要预判聚焦移动方向不满足现代工业对效率的要求,所以普遍采用第二种聚焦方式。
4.现有的自动聚焦方式通过半锥形光束在聚焦面、焦前焦后的不同光斑形状做出判断。聚焦于焦外时(焦前)激光光斑呈现左侧半圆形;聚焦于焦内时(焦后)激光光斑呈现为右侧半圆形;焦点处,理论上激光束会聚为一点。理论上如此,实际操作时当镜头从焦点位置逐渐离焦的过程中,激光束的形状变化是缓慢的,由于半椎体形状的光束数值孔径只占到显微镜数值孔径的一半,也就是聚焦信号的焦深大于物镜的焦深,不能足够反映物体离焦的程度。
5.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
6.本发明的主要目的是提供一种自动调焦系统,旨在解决现有技术中对焦成像不准确的技术问题。
7.为实现上述目的,本发明提出的自动调焦系统,包括照明系统、特征信号产生系统、tir棱镜、反射镜、物镜、成像系统以及处理器;
8.所述照明系统产生两路射向所述特征信号产生系统的照明光束;
9.所述特征信号产生系统包括两个具有规则周期的透明光栅;
10.两所述照明光束分别经过一所述透明光栅后形成两路透明光栅图像光束并射向所述tir棱镜,经由所述tir棱镜的两路所述透明光栅图像光束以不同角度射向所述物镜,两路所述透明光栅图像光束经过所述物镜后在物面进行干涉而形成莫尔条纹图像,所述成像系统用于捕获该莫尔条纹图像,所述处理器用于根据所述成像系统捕获的该莫尔条纹图像的位置以确定所述自动调焦系统的离焦方向和离焦量,并根据所述离焦方向和离焦量确定所述物镜位置的调整量。
11.本发明技术方案所提出的自动调焦系统,通过照明系统产生两路射向所述特征信号产生系统的照明光束,而特征信号产生系统包括两个具有规则周期的透明光栅,从而两路照明光束经过透明光栅形成两路透明光栅图像光束,通过tir棱镜、反射镜的作用以不同角度进入物镜,进而在物面产生干涉,形成莫尔条纹,由于莫尔条纹对微小相对位移具有放
大作用,相对夹角越小莫尔条纹位移放大倍率越大,根据莫尔条纹不同的位置,处理器可以更准确地给出离焦方向和离焦量,如此在焦距调节过程中更准确。
12.可选地,所述自动调焦系统还包括执行系统;
13.所述处理器根据所述调整量生成调节命令,并将所述调节命令发送给所述执行系统;
14.所述执行系统根据所述调节命令调整所述物镜的位置。
15.可选地,所述照明系统包括照明光源、照明透镜、第一反光镜、第二反光镜以及第三反光镜;
16.所述照明光源发出的光束经过所述照明透镜后,部分光束依次经过所述第一反光镜、第二反光镜的反射后形成射向一所述透明光栅的一所述照明光束,而另一部分光束经过所述第三反光镜的反射后形成射向另一所述透明光栅的另一所述照明光束,其中,每一所述照明光束的孔径小于或等于所述物镜的孔径的二分之一。
17.可选地,所述自动调焦系统还包括第四反光镜和分色镜,所述透明光栅图像光束依次经过第四反光镜和所述分色镜反射后射向所述物镜。
18.可选地,所述分色镜为分光比为50/50的分光镜或者二色向镜。
19.可选地,所述成像系统包括第一管镜和第一相机,所述自动调焦系统还包括第一分光镜,经由所述tir棱镜的两路所述透明光栅图像光束依次经过所述第一分光镜、所述第一管镜后射向所述第四反光镜,而所述物面产生的莫尔条纹图像经由所述物镜、所述分色镜、所述第四反光镜、所述第一分光镜入射至所述第一相机的感光面。
20.可选地,所述自动调焦系统还包括成像光源、第二分光镜、第二管镜以及第二相机;
21.所述成像光源发出的光束经过所述第二分光镜的反射射向所述分色镜,所述分色镜对照明光束进行分光处理并射向所述物镜,经过所述物镜的照明光束投射至所述物面上用于供所述物面上的被检测物的照明,所述被检测物将照明光束反射以形成反射光线,所述反射光线依次经过所述物镜、所述分色镜、所述第二分光镜以及所述第二管镜,最后汇聚至所述第二相机。
22.可选地,所述第二分光镜的分光比为50/50。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
24.图1为本发明自动调焦系统一实施例的结构示意图;
25.图2为图1中自动调焦系统一应用场景示意图;
26.图3为图1中自动调焦系统的原理示意图。
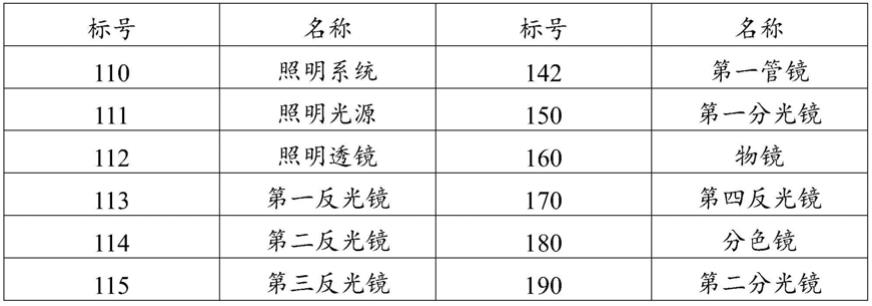
27.附图标号说明:
[0028][0029][0030]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0031]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0032]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0033]
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,全文中的“和/或”包括三个方案,以a和/或b为例,包括a技术方案、b技术方案,以及a和b同时满足的技术方案;另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0034]
本发明提出一种自动调焦系统。
[0035]
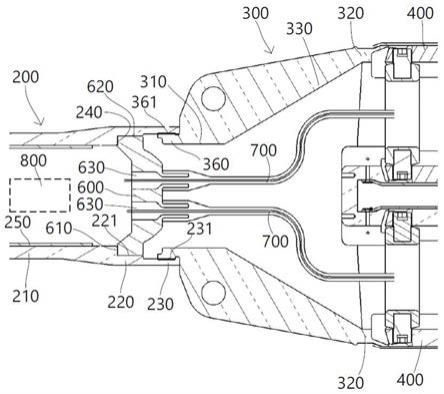
请参照图1至3,在本发明实施例中,本发明提出的自动调焦系统包括照明系统110、特征信号产生系统(未标示)、tir棱镜130、物镜160、成像系统140以及处理器(未图示)。
[0036]
所述照明系统110产生两路射向特征信号产生系统的照明光束,所述特征信号产生系统包括两个具有规则周期的透明光栅120,两照明光束分别经过一透明光栅120后形成两路透明光栅图像光束并射向tir棱镜130,经由tir棱镜130的两路透明光栅图像光束以不同角度射向物镜160,两路透明光栅图像光束经过物镜160后在物面w进行干涉而形成莫尔
条纹图像,成像系统140用于捕获该莫尔条纹图像,处理器用于根据成像系统140捕获的该莫尔条纹图像的位置以确定所述自动调焦系统的离焦方向和离焦量,并根据离焦方向和离焦量确定物镜160位置的调整量。
[0037]
本发明技术方案所提出的自动调焦系统,通过照明系统110产生两路射向所述特征信号产生系统的照明光束,而特征信号产生系统包括两个具有规则周期的透明光栅120,从而两路照明光束经过透明光栅120形成两路透明光栅图像光束,通过tir棱镜130的作用以不同角度进入物镜160,进而在物面w产生干涉,形成莫尔条纹,由于莫尔条纹对微小相对位移具有放大作用,相对夹角越小莫尔条纹位移放大倍率越大,根据莫尔条纹不同的位置,处理器可以更准确地给出离焦方向和离焦量,如此在焦距调节过程中更准确。
[0038]
在一实施例中,所述自动调焦系统还包括执行系统;所述处理器根据调整量生成调节命令,并将调节命令发送给所述执行系统;执行系统根据调节命令调整物镜160的位置。其中,执行系统至少具有三个调节维度,包括x方向旋转调节和y方向旋转调节,用于自动调平;z方向移动调节,用于自动对焦,其包括有伺服电机以及传动机构等部件,其可以参照现有结构设计,在此不再赘述。本技术自动调焦系统通过该执行系统的设计,可以适应于工业生产时的自动调节使用需求。
[0039]
在一实施例中,所述照明系统110包括照明光源111、照明透镜112、第一反光镜113、第二反光镜114以及第三反光镜115;所述照明光源111发出的光束经过照明透镜112后,部分光束依次经过第一反光镜113、第二反光镜114的反射后形成射向一所述透明光栅120的一所述照明光束,而另一部分光束经过第三反光镜115的反射后形成射向另一所述透明光栅120的另一所述照明光束,其中,每一所述照明光束的孔径小于或等于物镜160的孔径的二分之一。请继续参照图1,本技术照明透镜112由至少两块透镜构成的透镜组从而可以提高出光质量,tir棱镜130包括两块三角棱镜而形成全反射棱镜,第一反光镜113和第三反光镜115是分别设置在照明透镜112的光轴的两侧并且将照明透镜112射出的光束的各自一半以不同的角度射向tir棱镜130中的一三角棱镜,图1可以看到,一透明光栅120设置在第三反光镜115和该三角棱镜之间,则一路照明光束经过该透明光栅120后形成的透明光栅图像光束以垂直的角度经由一三角棱镜的直角面垂直射入,这样原则上可以实现100%的透明光栅图像光束穿过,而另一透明光栅120设置在第二反光镜114和另一三角棱镜之间,另一路照明光束经过该透明光栅120后形成的另一透明光栅图像光束以倾斜的角度经由另一个三角棱镜的斜面射入,则该透明光栅图像光束被tir棱镜130全反射,通过以上设置,两路透明光栅图像光束形成过程中照明光源111的光损耗较少,并且我们还可以看到,本技术的方案只需要一个照明光源111即可实现,如此可以大大简化了整个自动调焦系统的结构,降低成本,并且对于照明光源111的要求也不会太高,如此更能实现其应用到工业生产中,实用性更强。当然,在不考虑安装空间、成本的因素下,本技术的照明系统110也可以采用两个照明光源111和多个照明透镜112的形式以形成两路照明光束,本技术对此不作限制。
[0040]
在一实施例中,所述自动调焦系统还包括第四反光镜170和分色镜180,透明光栅图像光束依次经过第四反光镜170和分色镜180反射后射向物镜160。可选地,所述分色镜180为分光比为50/50的分光镜或者二色向镜,本技术通过第四反光镜170和分色镜180的设置,可以使得整个自动调焦系统的空间利用率更高,可以使得整体结构更紧凑,从而更能适应于工业生产的安装需求。
[0041]
进一步地,所述成像系统140包括第一管镜142和第一相机141,所述自动调焦系统还包括第一分光镜150,经由所述tir棱镜130射出的两路透明光栅图像光束依次经过第一分光镜150、第一管镜142后射向第四反光镜170,而所述物面w产生的莫尔条纹图像经由物镜160、分色镜180、第四反光镜170、第一分光镜150入射至所述第一相机141的感光面。其中,所述透明光栅120位于第一管镜142的物面w上,其中第一分光镜150的结构可以参照tir棱镜130,在此不再赘述,本技术的自动调焦系统通过该光路设置,使得整体结构更紧凑,成像效果更好。
[0042]
可选地,所述自动调焦系统还包括成像光源(未图示)、第二分光镜190、第二管镜200以及第二相机210;
[0043]
所述成像光源发出的光束经过所述第二分光镜190的反射射向所述分色镜180,所述分色镜180对照明光束进行分光处理并射向所述物镜160,经过所述物镜160的照明光束投射至所述物面w上用于供所述物面w上的被检测物的照明,所述被检测物将照明光束反射以形成反射光线,所述反射光线依次经过所述物镜160、所述分色镜180、所述第二分光镜190以及所述第二管镜200,最后汇聚至所述第二相机210的感光面。可选地,所述第二分光镜190的分光比为50/50。也即,本技术自动调焦系统还可以实现对物面w上的物体进行检测,使得整个系统功能更强大。
[0044]
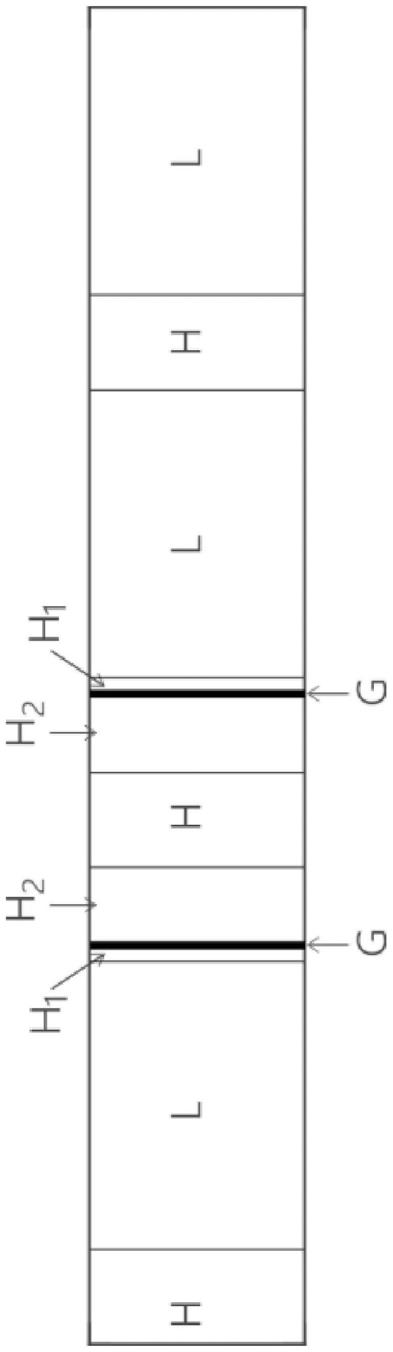
请参照图2,结合以上内容,本技术的自动调焦系统通过以上结构,在应用场景中,当物面w处于焦内时,形成的莫尔条纹在透明光栅120图像中朝向左侧偏移,当物面w处于焦外时,形成的莫尔条纹朝向在透明光栅120图像中朝向右侧偏移,当物面w处于焦点处时,形成的莫尔条纹则是在透明光栅120图像的中间位置。这样处理器可以非常清晰的判断出物面w的离焦方向。
[0045]
请参照图3,莫尔条纹间距l和透明光栅120栅距d的关系为:
[0046]
l=d/sin(θ)其中θ为两个透明光栅120图像的夹角。
[0047]
当θ较小时,上述公式可以简化为:
[0048]
l=d/θ其中θ用弧度表示。
[0049]
当光栅相对移动δd时,莫尔条纹移动为δl,莫尔条纹移动放大系数为k,那么k:
[0050]
k=δl/δd=1/θ。当θ=3
°
,k=19倍。
[0051]
由以上内容我们可以知道,两透明光栅120图像的相对移动经过莫尔条纹的放大,并由第一管镜142成像到第一相机141,从而可以保证聚焦更精确。
[0052]
以上所述仅为本发明的可选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。