1.本发明涉及激光焊接技术领域,特别涉及到对尺寸精度和预紧力精度要求较高,尤其涉及一种传感器封装用的一种激光焊接夹具。
背景技术:
2.传感器是工程系统获取准确可靠的外界环境信息的重要工具,可用于检测和控制生产过程中的各个参数,在工业生产等领域中起重要作用;但是传感器的工作环境会对敏感元件产生影响,使测量数据的产生偏差;传感器的封装是保护敏感元件不受外界因素影响的重要方式。
3.激光焊接是一种新型的焊接技术,其具有热量集中,焊接精度高和自动化程度高等特点,广泛应用于特殊构件的封装,在焊接过程中,调节电流、脉宽、频率和扫描速度等参数,可改进焊接质量。
4.中国专利202011530771.3公开了一种传感器激光焊接装置,其结构包括机架、上料组件、预夹紧组件、移动组件、定位组件、焊接组件及收料组件,该装置通过预夹紧组件的设置,在进行焊接之前对毛细管及盲盖进行三点式预夹紧,避免焊接过程中盲盖在毛细管内移动,且各个工位之间紧密结合,实现了高度集成式自动化生产,且生产效率较高,但在焊接过程中待焊接件不能旋转且不能检测预紧力;专利202011489445.2公开了激光焊接夹具及激光焊接系统,其结构从上至下一次为旋转驱动机、构内涨夹紧机构、防飞溅机构以及底座,该夹具结构简单,安装方便,在焊接过程中,待焊接件可随工作台旋转,升降,适用于焊接不同外形的待焊接件,但焊接过程中不能精确显示预紧力大小;中国专利202010834779.2公开了一种激光焊接夹具,其结构包括一个工作台、一个移动机构、两个夹持机构和两个缓冲机构,该激光焊接夹具能够调节固定件和调节杆改变长款,但焊接时焊接件不能进行旋转且不能显示预紧力大小,对于传感器这种精密产品,预紧力的值会对传感器性能产生一定影响。
技术实现要素:
5.因此,本发明的目的在于克服上述激光焊接夹具的缺陷,提供一种能够适用于多种传感器焊接的焊接夹具,该夹具可适配多种激光焊接系统,适用于直径5mm至30mm之间的传感器焊接封装,且能够对传感器加载数值可控的预紧力。
6.本发明解决其技术问题所采取的技术方案是:一种传感器封装用的激光焊接夹具,其结构从上到下依次为升降机构3、预紧力检测机构2、旋转驱动机构1和底板4,所述的旋转驱动机构1中包括一号螺钉组101、步进电机支架102、一号螺栓组103、下转轴104、转接头105以及步进电机106,所述的预紧力检测机构2中包括上夹具201、标准测力传感器202、一号轴承架203、轴承204、上转轴205以及二号螺栓组206,所述的升降机构3中包括丝杠301、左外壳302、丝杠螺母303、三号螺栓组304、二号轴承架305、转盘306、四号螺栓组307、蜗杆308、涡轮309、轴承座组310,升降台311、导杆312、三号轴承架313、右外壳314以及二号
螺钉组315。
7.作为对被技术方案的进一步限定,所述转盘306与蜗杆308连接,带动涡轮309转动,涡轮309安装在丝杠301的上端,丝杠螺母303与丝杠301配合,使用三号螺栓组304把丝杠螺母303固定在升降台311上,丝杠301转动时,所述丝杠螺母303与升降台311可同时上下移动,所述的一号轴承架203安装在升降台311上,轴承204安装在轴承座203下方,上转轴205与轴承204配合,标准测力传感器202安装在上转轴205下端,上夹具201安装在标准测力传感器202下端,所述的转接头105安装在下转轴104上端,下转轴104的下端与步进电机106连接,步进电机106通过螺栓组103固定在步进电机支架102上,步进电机支架102通过螺栓组101固定在底板4上;所述的螺栓组316把外壳311和外壳313固定在轴承座301和轴承座308两侧,前侧形成的空间可起导向槽作用,限制升降台304发生转动。
8.作为对本技术方案的进一步限定,所述的涡轮309和蜗杆308组成的传动系统具有自锁功能,当连接块到达指定位置且预紧力施加完后,即使松开转盘306,升降台311也不会在反向力的作用下产生位移或者改变预紧力的大小,保证焊缝质量和传感器灵敏度一致性;所述旋转驱动机构使用单片机控制步进电机106运动控,带动下转轴104和转换接头105的运动,实现待焊接传感器正转,反转、匀速转动和加速转动等,达到改善焊接质量和焊接效率的目标;所述的底板4呈字母“l”状,可实现该激光焊接预紧装置卧和立两种安装方式,且底板4可灵活适配各种不同的激光焊接仪器,针对不同外形的传感器进行激光焊接封装;旋转驱动机构中包含转接头104,通过改变转接头104的规格,可使该焊接夹具灵活适配直径为5mm至30mm之间的传感器,使用范围较广。
9.作为对本技术方案的进一步限定,所述的装置固定在激光焊接工作台上,根据待焊接传感器的尺寸更换不同尺寸的转接头105,使用转盘306调节上夹具201位置,并根据标准测力传感器202的输出调整预紧力大小,通过控制步进电机106的转速调节焊接速度。
10.与现有技术相比,本发明的优点和积极效果是:1 本发明的激光焊接夹具使用上下两夹具固定待焊接的传感器,上夹具上方安装标准测力传感器,可精确显示预紧力大小,实现焊接过程中预紧力可控,提升焊接质量,降低预紧力偏差对传感器精度和灵敏度的影响;2 本发明的激光焊接夹具中包含旋转驱动机构,可控制待焊接传感器的转向和转速,提升焊接效率和焊接质量;3 本发明的激光焊接夹具的底座为“l”形,实现坐立两用,灵活适配多种激光焊接系统;4 本发明的激光焊接夹具可更换不同尺寸转接头,适配直径为5mm至30mm的传感器或其他柱形待焊接件,用途十分广泛。
附图说明
11.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
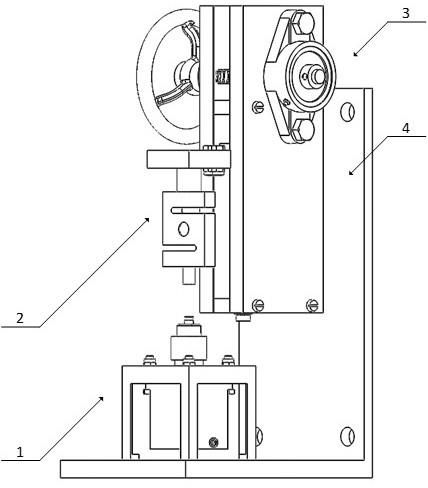
12.图1为本发明的一种实施方式中传感器封装用激光焊接夹具的整体结构示意图。
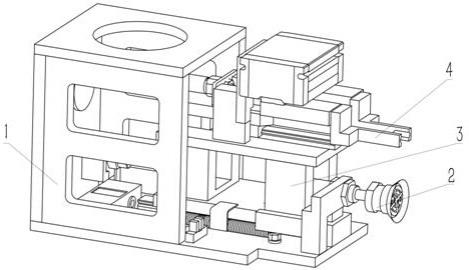
13.图2为本发明的一种实施方式中传感器封装用激光焊接夹具的旋转驱动机构的结构示意图。
14.图3为本发明的一种实施方式中传感器封装用激光焊接夹具的预紧力检测机构的结构示意图。
15.图4为本发明的一种实施方式中传感器封装用激光焊接夹具的升降机构的结构示意图。
16.图中标号:旋转驱动机构1、预紧力检测机构2、升降机构3、底板4、螺钉组101、步进电机支架102、螺栓组103、下转轴104、转接头105、步进电机106、上夹具201、标准测力传感器202、轴承架203、轴承204、上转轴205、螺栓组206、丝杠301、左外壳302、丝杠螺母303、三号螺栓组304、二号轴承架305、转盘306、四号螺栓组307、蜗杆308、涡轮309、轴承座组310,升降台311、导杆312、三号轴承架313、右外壳314、二号螺钉组315。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
18.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.如图1所示,本发明所述的传感器封装用激光焊接夹具中包括旋转驱动机构1、预紧力检测机构2、升降机构3以及底座4。
20.如图2所示,本发明所述的旋转驱动机构1中包括螺钉组101、步进电机支架102、螺栓组103、下转轴104、转接头105以及步进电机106。
21.所述的螺钉组101把步进电机支架102固定在底板4上,螺栓组103把步进电机1006固定在步进电机支架102上,步进电机106的输出轴与下转轴104连接,转接头1005安装在下转轴104上端,转接头105用于安装待焊接传感器,其尺寸由待焊接传感器确定,可改变转接头104的尺寸可是所述的传感器封装用激光焊接夹具灵活适配各尺寸的待焊接传感器。
22.如图3所示,本发明所述的预紧力检测机构2中包括上夹具201、标准测力传感器2002、轴承架203、轴承204、上转轴205以及螺栓组206。
23.所述的上夹具2001用于固定待焊接传感器,标准测力传感器202可实时输出当前待焊接传感器所受的预紧力数值,通过调节上夹具201位置可调节预紧力的大小,实现预紧力精确可控,螺栓组206用于连接轴承架203和升降台3004。
24.如图4所示,本发明所述的升降机构3中包括轴承座301、丝杠302、丝杠螺母303、升降台3004、螺栓组305、涡轮306、蜗杆307、轴承座308、螺钉组309、导杆310,外壳311、转盘312、外壳313、轴承座314、螺栓组315以及螺栓组316。
25.所述的蜗轮306和蜗杆307组成的传动系统具有自锁功能,可实现焊接过程中,预紧力大小稳定,保证焊接质量,降低预紧力误差对传感器灵敏度的影响。
26.图1至图4所示,本发明所述的传感器封装用激光焊接夹具的一实施例中包括旋转驱动机构1、预紧力检测机构2、升降机构3以及底座4;所述的升降机构3用于调节上夹具201
位置,固定待焊接传感器,所述的预紧力检测机构可实时输出待焊接传感器所受的预紧力的数值,通过调节转盘312,可调节预紧力大小,精确控制焊接过程预紧力数值,提高待焊接传感器的灵敏度,旋转驱动机构1用于驱动待焊接传感器,实现待焊接传感器360
°
旋转,且其转速可调,提升焊接质量和焊接效率,所述的底板4起支撑和固定作用所述的蜗轮306和蜗杆307组成的传动系统具有自锁功能,可实现焊接过程中,预紧力大小稳定,保证焊接质量,降低预紧力误差对传感器灵敏度的影响。
27.图上述说明并非对本发明的限制,本发明也不限于上述举例。以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,凡在本发明的精神和原则之内,所做的修改、替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。