技术特征:
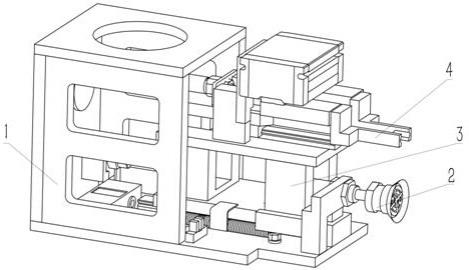
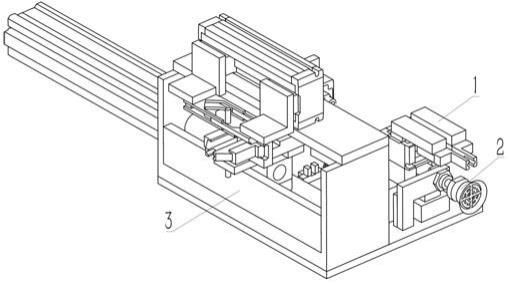
1.标牌焊接机器人专用末端操作器,安装在工业机器人的末端,用于标牌焊接,包括连接支撑装置(1)、标牌吸取机构(2)、焊钉掰断机构(3)和夹钉焊接机构(4),其特征在于,连接支撑装置(1)通过后支撑板与工业机器人的末端固联,标牌吸取机构(2)安装在连接支撑装置(1)的下面,焊钉掰断机构(3)安装在标牌吸取机构(2)的上面,夹钉焊接机构(4)安装在焊钉掰断机构(3)的上面。2.根据权利要求1所述的标牌焊接机器人专用末端操作器,其特征在于,连接支撑装置(1)包括顶支撑板(1
‑
1)、定位法兰(1
‑
2)、后支撑板(1
‑
3)和侧支撑板(1
‑
4),后支撑板(1
‑
3)与工业机器人末端固联,定位法兰(1
‑
2)由里向外安装在后支撑板(1
‑
3)上,两块侧支撑板(1
‑
4)固定在后支撑板(1
‑
3)的两侧,顶支撑板(1
‑
1)固定在后支撑板(1
‑
3)和侧支撑板(1
‑
4)的上面。3.根据权利要求1所述的标牌焊接机器人专用末端操作器,其特征在于,标牌吸取机构(2)包括真空吸盘(2
‑
1)、挡块(2
‑
2)、吸盘安装板(2
‑
3)、弹簧(2
‑
4)、行程开关挡片(2
‑
5)、行程开关(2
‑
6)、底板(2
‑
7)、真空发生器(2
‑
8)、压力开关(2
‑
9)、压力开关支架(2
‑
10)、滑板(2
‑
11)、标牌吸取机构导轨(2
‑
12)和标牌吸取机构滑块(2
‑
13),底板(2
‑
7)固定安装在连接支撑装置(1)上,底板(2
‑
7)上面后侧布置有真空发生器(2
‑
8)和压力开关支架(2
‑
10),压力开关(2
‑
9)安装在压力开关支架(2
‑
10)上,行程开关(2
‑
6)布置在底板(2
‑
7)靠右中部,标牌吸取机构导轨(2
‑
12)竖向安装在底板(2
‑
7)上面,挡块(2
‑
2)材质为橡胶,固定在底板(2
‑
7)前侧,滑板(2
‑
11)下面固联两个标牌吸取机构滑块(2
‑
13),标牌吸取机构滑块(2
‑
13)与标牌吸取机构导轨(2
‑
12)滑动配合,弹簧(2
‑
4)前端连接底板(2
‑
7)、后端连接滑板(2
‑
11),滑板(2
‑
11)靠右中部固定有行程开关挡片(2
‑
5),吸盘安装板(2
‑
3)的一端固定真空吸盘(2
‑
1),吸盘安装板(2
‑
3)的另一端安装在滑板(2
‑
11)右侧面。4.根据权利要求1所述的标牌焊接机器人专用末端操作器,其特征在于,焊钉掰断机构(3)包括掰钉气缸(3
‑
1)、气缸安装架(3
‑
2)、支撑块(3
‑
3)、套筒连接件(3
‑
4)、套筒(3
‑
5)、焊钉掰断机构导轨(3
‑
6)、垫块(3
‑
7)、垫板(3
‑
8)和焊钉掰断机构滑块(3
‑
9),垫块(3
‑
7)固定安装在标牌吸取机构(2)的滑板上,垫板(3
‑
8)固定在两个垫块(3
‑
7)上,垫板(3
‑
8)上面两侧分别布置两个支撑块(3
‑
3),焊钉掰断机构导轨(3
‑
6)竖向安装在垫板(3
‑
8)上面,套筒(3
‑
5)下面固联两个焊钉掰断机构滑块(3
‑
9),焊钉掰断机构滑块(3
‑
9)与焊钉掰断机构导轨(3
‑
6)滑动配合,掰钉气缸(3
‑
1)安装在气缸安装架(3
‑
2)的中间安装孔中,气缸安装架(3
‑
2)固定在两个支撑块(3
‑
3)上,掰钉气缸(3
‑
1)前端固联套筒连接件(3
‑
4),套筒连接件(3
‑
4)下侧固联在套筒(3
‑
5)的上面。5.根据权利要求1所述的标牌焊接机器人专用末端操作器,其特征在于,夹钉焊接机构(4)包括夹钉气缸(4
‑
1)、绝缘块(4
‑
2)、焊钳(4
‑
3)、气缸支撑板(4
‑
4)和夹钉气缸滑块(4
‑
5),气缸支撑板(4
‑
4)固定安装在焊钉掰断机构(3)的两个支撑块上,夹钉气缸(4
‑
1)安装在气缸支撑板(4
‑
4)一侧,夹钉气缸内部设有两个夹钉气缸滑块(4
‑
5),两个绝缘块(4
‑
2)分别固定在夹钉气缸滑块(4
‑
5)上,两个焊钳(4
‑
3)分别安装在两个绝缘块(4
‑
2)上,两个焊钳(4
‑
3)头部分别设有半圆形的凹槽,相互闭合时可以夹紧圆形焊钉的尾部、并与焊钉紧密接触。6.根据权利要求5所述的标牌焊接机器人专用末端操作器,其特征在于,焊钳(4
‑
3)的材质为紫铜。
技术总结
标牌焊接机器人专用末端操作器,安装在工业机器人的末端,用于标牌焊接,包括连接支撑装置(1)、标牌吸取机构(2)、焊钉掰断机构(3)和夹钉焊接机构(4)。本发明末端操作器自动取钉、取标牌并焊接的过程大大提高了工作效率,焊接的标牌连接紧固不容易脱落,机器人自动焊接避免了人工焊接存在的质量和安全问题。焊接结束后多余的焊钉尾部伸出过长,标牌焊接机器人专用末端操作器所携带的焊钉掰断机构可以快速地在焊接结束后掰断焊钉的多余部分。该专用末端操作器可以安装在工业机器人末端,焊接、掰断效率高,速度快,可以代替人工操作,实现标牌焊接的自动化。焊接的自动化。焊接的自动化。
技术研发人员:张付祥 张超 李文忠 李俊慧 黄风山
受保护的技术使用者:河北科技大学
技术研发日:2021.10.12
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。