1.本发明属于语音识别领域,涉及语音识别技术,具体是一种智能头盔用基于深度学习的语音识别系统及方法。
背景技术:
2.公开号为cn106537494a公开了在现有的服务器和客户端型语音识别装置中,在未回送任意一方的语音识别结果的情况下,需要利用者从头讲话,因而存在利用者的负担较大这样的问题。本发明的语音识别装置向服务器发送输入语音,接收服务器对已发送的输入语音进行语音识别的结果即第1语音识别结果,进行输入语音的语音识别而得到第2语音识别结果,参照表现输入语音的讲话要素的结构的讲话规则,判定符合第2语音识别结果的讲话规则,根据第1语音识别结果的有无和第2语音识别结果的有无与构成讲话规则的讲话要素的有无之间的对应关系,决定表示未能得到语音识别结果的讲话要素的语音识别状态,与已决定的语音识别状态对应地,生成询问未能得到语音识别结果的讲话要素的应答语句,输出应答语句。
3.但是,针对该语音识别技术,没有涉及到摩托车用户,在进行驾驶时,无法在头盔端和手机端进行互联时候的语音识别问题,以及何种情况下不能进行识别;为了解决这一技术缺陷,现提供一种解决方案。
技术实现要素:
4.本发明的目的在于提供一种智能头盔用基于深度学习的语音识别系统及方法。
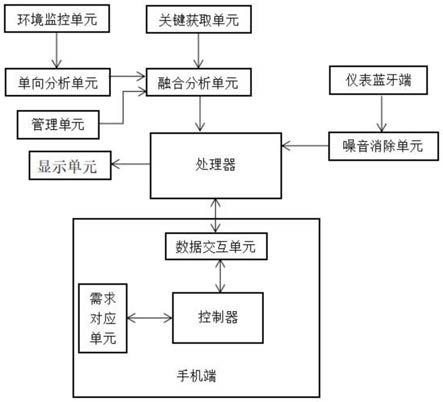
5.本发明的目的可以通过以下技术方案实现:一种智能头盔用基于深度学习的语音识别系统,包括环境监控单元、单向分析单元、关键获取单元、融合分析单元、处理器、仪表蓝牙端、噪音消除单元、处理器、显示单元、管理单元和手机端;其中,所述收集端包括数据交互单元、控制器和需求对应单元;其中,所述环境监控单元用于对形成环境进行监控,并进行等级分析操作,具体等级分析操作步骤如下:步骤一:该环境监控单元包括设置在摩托车车把或者车头处无人遮挡的横向测距模块和智能判定模块;步骤二:首先利用横向测距模块测量在摩托车左右两侧的距离,将左侧和右侧的距离对应的标记为左向距离和右向距离;步骤三:每间隔t1时间获取一次左向距离和右向距离,得到左向距离组zi,i=1...n;和右向距离组yi,i=1...n;步骤四:将左向距离组zi和右向距离组yi传输到智能判定模块;步骤五:智能判定模块接收到横向测距模块传输的左向距离组zi和右向距离组yi;
步骤六:之后自动对其进行分析,首先获取到左向距离组zi,对其左向经过判定,得到左向个数;步骤七:获取到右向距离组yi,对其右向经过判定,得到右向个数;所述环境监控单元用于将左向个数和右向个数传输到单向分析单元,所述单向分析单元接收换环境监控单元传输的左向个数和右向个数,并对二者进行单向融合分析,得到融向个数rg;所述单向分析单元用于将融向个数rg传输到融合分析单元,所述融合分析单元接收单向分析单元传输的融向个数rg;所述关键获取单元用于获取摩托车的实时速度,并将实时速度传输到融合分析单元,所述融合分析单元接收关键获取单元传输的实时速度,并结合实时速度进行安值分析,得到安值az;所述融合分析单元用于将安值az传输到处理器,所述处理器接收融合分析单元传输的安值az;所述处理器在安值az超过预设值x4时产生停止信号,所述处理器在产生停止信号时会自动切断显示单元的显示,同时会切断处理器与数据交互单元之间的联系。
6.进一步地,步骤六中的左向经过判定的具体步骤为:s1:首先获取到zi,利用公式计算单增值,具体公式为:单增值=zi
‑
zi
‑
1;s2:当满足单增值≤x1,且zi
‑
1≤x2时,产生经过信号;此处x1、x2均为预设值,且x1≤x2;s3:持续监控t2时间,t2为预设时间,且t2>t1;获取到产生经过信号的个数,将该个数标记为左向个数;之后重复此步骤六的监控。
7.进一步地,步骤七中的右向经过判定的具体步骤为:s1:首先获取到yi,利用公式计算单增值二,具体公式为:单增值二=yi
‑
yi
‑
1;s2:当满足单增值二≤x1,且zi
‑
1≤x2时,产生经过信号;s3:持续监控t2时间;获取到产生经过信号的个数,将该个数标记为右向个数;之后重复此步骤七的监控。
8.进一步地,融向分析的具体步骤为:ss1:获取到左向个数和右向个数;ss2:之后利用公式计算融向个数rg,具体计算公式为:rg=1.25*左向个数 右向个数;ss3:得到融向个数rg。
9.进一步地,安值分析的具体步骤为:s01:获取到融向个数rg;s02:之后获取到摩托车的实时速度,每间隔t3时间采集一次该实时速度,得到实时速度组vj,j=1...n;s03:设定速度参值组,速度参值组即为从最新的实时速度开始选择,即为vn,之后连续往前推九组,即为从vn
‑
9到vn;
s04:之后获取到速度参值组vj,j=n
‑
9、...、n;之后对速度参值组进行均值求取,将均值标记为pv;s05:之后将满足vj
‑
pv≥x3的速度参值组留下后。重新进行均值求取;s06:将重新求取得到的均值标记为目标速值mv;s07:之后计算实时安值az,具体计算公式为:az=0.532*mv 0.468*rg;式中,各个计算因素均为去除量纲后计算。
10.进一步地,所述仪表蓝牙端还用于头盔进行语音采集作用,并自动结合噪音消除单元进行语音采集操作,语音采集操作具体步骤为:ss01:首先进行实时环境声音采集,具体采集步骤为:ss011:在开始时,采集t4时长的背景语音;ss012:之后当t4时间后,若没有检测到用户的声音信息,则持续进行背景语音采集;同时会在每新录入一个单位的时间录制的背景语音时,会将初始的单位时间段的背景语音删除;ss013:当测到用户声音信息时,会获取t4时间的环境声音;ss02:之后自动获取到用户的声音信息;ss03:将声音信息标记为综合声音;ss04:同时将环境声音标记为背景声音;ss05:在综合声音中去除背景声音,得到纯净人声;ss06:对纯净人声进行语音转文字,并进行指令识别,获取到用户指令;所述噪音消除单元用于将用户指令传输到处理器,所述处理器接收到噪音消除单元传输的用户指令,并将用户指令传输到数据交互单元,所述数据交互单元用于将用户指令传输到控制器,通过控制器控制需求对应单元实行指令,并将实行指令的画面形成反馈画面;所述控制器用于将反馈画面通过数据交互单元返回到处理器,所述处理器用于将反馈画面传输到显示单元,所述显示单元接收处理器传输的反馈画面并进行实时显示。
11.一种智能头盔用基于深度学习的语音识别方法,该方法具体包括下述步骤:步骤一:进行安全判定,具体判定方式为:s1:测量在摩托车左右两侧的距离,将左侧和右侧的距离对应的标记为左向距离和右向距离;s2:每间隔t1时间获取一次左向距离和右向距离,得到左向距离组zi,i=1...n;和右向距离组yi,i=1...n;s3:获取到左向距离组zi,对其左向经过判定,具体为:s31:首先获取到zi,利用公式计算单增值,具体公式为:单增值=zi
‑
zi
‑
1;s32:当满足单增值≤x1,且zi
‑
1≤x2时,产生经过信号;此处x1、x2均为预设值,且x1≤x2;s33:持续监控t2时间,t2为预设时间,且t2>t1;获取到产生经过信号的个数,将该个数标记为左向个数;之后重复此步骤六的监控;s4:获取到右向距离组yi,对其右向经过判定,具体为:s41:首先获取到yi,利用公式计算单增值二,具体公式为:
单增值二=yi
‑
yi
‑
1;s42:当满足单增值二≤x1,且zi
‑
1≤x2时,产生经过信号;s43:持续监控t2时间;获取到产生经过信号的个数,将该个数标记为右向个数;持续进行该监控;步骤二:对左向个数和右向个数进行单向融合分析,具体为:ss1:获取到左向个数和右向个数;ss2:之后利用公式计算融向个数rg,具体计算公式为:rg=1.25*左向个数 右向个数;ss3:得到融向个数rg;步骤三:获取摩托车的实时速度,并结合实时速度进行安值分析,具体安值分析的步骤为:s01:获取到融向个数rg;s02:之后获取到摩托车的实时速度,每间隔t3时间采集一次该实时速度,得到实时速度组vj,j=1...n;s03:设定速度参值组,速度参值组即为从最新的实时速度开始选择,即为vn,之后连续往前推九组,即为从vn
‑
9到vn;s04:之后获取到速度参值组vj,j=n
‑
9、...、n;之后对速度参值组进行均值求取,将均值标记为pv;s05:之后将满足vj
‑
pv≥x3的速度参值组留下后。重新进行均值求取;s06:将重新求取得到的均值标记为目标速值mv;s07:之后计算实时安值az,具体计算公式为:az=0.532*mv 0.468*rg;式中,各个计算因素均为去除量纲后计算;步骤四:在安值az超过预设值x4时产生停止信号,在产生停止信号时会自动切断显示单元的显示,同时会切断头盔与手机之间的联系;步骤五:在连通的情况下进行手机与头盔之间互动,通过仪表蓝牙端进行语音采集作用,并自动进行语音采集操作,语音采集操作具体步骤为:ss01:首先进行实时环境声音采集,具体采集步骤为:ss011:在开始时,采集t4时长的背景语音;ss012:之后当t4时间后,若没有检测到用户的声音信息,则持续进行背景语音采集;同时会在每新录入一个单位的时间录制的背景语音时,会将初始的单位时间段的背景语音删除;ss013:当测到用户声音信息时,会获取t4时间的环境声音;ss02:之后自动获取到用户的声音信息;ss03:将声音信息标记为综合声音;ss04:同时将环境声音标记为背景声音;ss05:在综合声音中去除背景声音,得到纯净人声;ss06:对纯净人声进行语音转文字,并进行指令识别,获取到用户指令;步骤六:根据用户指令实行相应命令。
12.本发明的有益效果:
本发明通过进行安全判定,测量在摩托车左右两侧的距离,将左侧和右侧的距离对应的标记为左向距离和右向距离;根据二者判定此时摩托车经过了多少车辆,从而判定用户是否处于危险情况,给予一定的技术上的数据支持;通过对左向个数和右向个数进行单向融合分析,得到一个能综合表现车辆多寡的参数,即为融向个数;之后结合摩托车的实时速度进行安值分析,得到安值az,在安值az超过预设值x4时产生停止信号,在产生停止信号时会自动切断显示单元的显示,同时会切断头盔与手机之间的联系;在连通的情况下进行手机与头盔之间互动,通过仪表蓝牙端进行语音采集作用,并自动进行语音采集操作,在此过程中通过预设背景的方式进行降噪处理;本发明简单有效,且易于实用。
附图说明
13.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
14.图1为本发明的系统框图;图2为本发明的头盔与手机交互具体结构图。
具体实施方式
15.如图1所示,一种智能头盔用基于深度学习的语音识别系统,包括环境监控单元、单向分析单元、关键获取单元、融合分析单元、处理器、仪表蓝牙端、噪音消除单元、处理器、显示单元、管理单元和手机端;其中,所述收集端包括数据交互单元、控制器和需求对应单元;其中,所述环境监控单元用于对形成环境进行监控,并进行等级分析操作,具体等级分析操作步骤如下:步骤一:该环境监控单元包括设置在摩托车车把或者车头处无人遮挡的横向测距模块和智能判定模块;步骤二:首先利用横向测距模块测量在摩托车左右两侧的距离,将左侧和右侧的距离对应的标记为左向距离和右向距离;步骤三:每间隔t1时间获取一次左向距离和右向距离,得到左向距离组zi,i=1...n;和右向距离组yi,i=1...n;步骤四:将左向距离组zi和右向距离组yi传输到智能判定模块;步骤五:智能判定模块接收到横向测距模块传输的左向距离组zi和右向距离组yi;步骤六:之后自动对其进行分析,首先获取到左向距离组zi,对其左向经过判定,具体为:s1:首先获取到zi,利用公式计算单增值,具体公式为:单增值=zi
‑
zi
‑
1;s2:当满足单增值≤x1,且zi
‑
1≤x2时,产生经过信号;此处x1、x2均为预设值,且x1≤x2;s3:持续监控t2时间,t2为预设时间,且t2>t1;获取到产生经过信号的个数,将该
个数标记为左向个数;之后重复此步骤六的监控;步骤七:获取到右向距离组yi,对其右向经过判定,具体为:s1:首先获取到yi,利用公式计算单增值二,具体公式为:单增值二=yi
‑
yi
‑
1;s2:当满足单增值二≤x1,且zi
‑
1≤x2时,产生经过信号;s3:持续监控t2时间;获取到产生经过信号的个数,将该个数标记为右向个数;之后重复此步骤七的监控;所述环境监控单元用于将左向个数和右向个数传输到单向分析单元,所述单向分析单元接收换环境监控单元传输的左向个数和右向个数,并对二者进行单向融合分析,具体为:ss1:获取到左向个数和右向个数;ss2:之后利用公式计算融向个数rg,具体计算公式为:rg=1.25*左向个数 右向个数;ss3:得到融向个数rg;所述单向分析单元用于将融向个数rg传输到融合分析单元,所述融合分析单元接收单向分析单元传输的融向个数rg;所述关键获取单元用于获取摩托车的实时速度,并将实时速度传输到融合分析单元,所述融合分析单元接收关键获取单元传输的实时速度,并结合实时速度进行安值分析,具体安值分析的步骤为:s01:获取到融向个数rg;s02:之后获取到摩托车的实时速度,每间隔t3时间采集一次该实时速度,得到实时速度组vj,j=1...n;s03:设定速度参值组,速度参值组即为从最新的实时速度开始选择,即为vn,之后连续往前推九组,即为从vn
‑
9到vn;s04:之后获取到速度参值组vj,j=n
‑
9、...、n;之后对速度参值组进行均值求取,将均值标记为pv;s05:之后将满足vj
‑
pv≥x3的速度参值组留下后。重新进行均值求取;s06:将重新求取得到的均值标记为目标速值mv;s07:之后计算实时安值az,具体计算公式为:az=0.532*mv 0.468*rg;式中,各个计算因素均为去除量纲后计算;所述融合分析单元用于将安值az传输到处理器,所述处理器接收融合分析单元传输的安值az;所述处理器在安值az超过预设值x4时产生停止信号,所述处理器在产生停止信号时会自动切断显示单元的显示,同时会切断处理器与数据交互单元之间的联系;所述仪表蓝牙端还用于头盔进行语音采集作用,并自动结合噪音消除单元进行语音采集操作,语音采集操作具体步骤为:ss01:首先进行实时环境声音采集,具体采集步骤为:ss011:在开始时,采集t4时长的背景语音;ss012:之后当t4时间后,若没有检测到用户的声音信息,则持续进行背景语音采
集;同时会在每新录入一个单位的时间录制的背景语音时,会将初始的单位时间段的背景语音删除;ss013:当测到用户声音信息时,会获取t4时间的环境声音;ss02:之后自动获取到用户的声音信息;ss03:将声音信息标记为综合声音;ss04:同时将环境声音标记为背景声音;ss05:在综合声音中去除背景声音,得到纯净人声;ss06:对纯净人声进行语音转文字,并进行指令识别,获取到用户指令;所述噪音消除单元用于将用户指令传输到处理器,所述处理器接收到噪音消除单元传输的用户指令,并将用户指令传输到数据交互单元,所述数据交互单元用于将用户指令传输到控制器,通过控制器控制需求对应单元实行指令,并将实行指令的画面形成反馈画面;所述控制器用于将反馈画面通过数据交互单元返回到处理器,所述处理器用于将反馈画面传输到显示单元,所述显示单元接收处理器传输的反馈画面并进行实时显示。
16.如图2所示,我们在具体实施时,在头盔端我们需要采集语音信号,进行信号放大,滤波,a/d成数字信号,进行初步的噪声消除,回声消除,这一工作利用蓝牙模块来实现,可以保证低功耗,延迟电池的使用寿命,也不改变现有蓝牙头盔的设计。
17.头盔将语音信号传输到仪表后,利用仪表soc强大的计算能力,实现语音识别,这部分有两个特色,如何自强噪声环境下有效的识别语音语义,我们建立了大量的模型库,和强噪声背景的语音库。 算法加入了深度学习功能,随着使用次数的增加,识别准确度会提升。将语音识别出来的信息,通过蓝牙spp协议送到手机端的app进行功能匹配实现语音操控功能;也可以将语音识别部分的功能集成在智能头盔上,这样也可以实现头盔对手机的语音控制。具有配置灵活的特点。
18.整体来说基本上没有增加电子成本,实现了语言操控功能;一种智能头盔用基于深度学习的语音识别方法,该方法包括下述步骤:步骤一:进行安全判定,具体判定方式为:s1:测量在摩托车左右两侧的距离,将左侧和右侧的距离对应的标记为左向距离和右向距离;s2:每间隔t1时间获取一次左向距离和右向距离,得到左向距离组zi,i=1...n;和右向距离组yi,i=1...n;s3:获取到左向距离组zi,对其左向经过判定,具体为:s31:首先获取到zi,利用公式计算单增值,具体公式为:单增值=zi
‑
zi
‑
1;s32:当满足单增值≤x1,且zi
‑
1≤x2时,产生经过信号;此处x1、x2均为预设值,且x1≤x2;s33:持续监控t2时间,t2为预设时间,且t2>t1;获取到产生经过信号的个数,将该个数标记为左向个数;之后重复此步骤六的监控;s4:获取到右向距离组yi,对其右向经过判定,具体为:s41:首先获取到yi,利用公式计算单增值二,具体公式为:
单增值二=yi
‑
yi
‑
1;s42:当满足单增值二≤x1,且zi
‑
1≤x2时,产生经过信号;s43:持续监控t2时间;获取到产生经过信号的个数,将该个数标记为右向个数;持续进行该监控;步骤二:对左向个数和右向个数进行单向融合分析,具体为:ss1:获取到左向个数和右向个数;ss2:之后利用公式计算融向个数rg,具体计算公式为:rg=1.25*左向个数 右向个数;ss3:得到融向个数rg;步骤三:获取摩托车的实时速度,并结合实时速度进行安值分析,具体安值分析的步骤为:s01:获取到融向个数rg;s02:之后获取到摩托车的实时速度,每间隔t3时间采集一次该实时速度,得到实时速度组vj,j=1...n;s03:设定速度参值组,速度参值组即为从最新的实时速度开始选择,即为vn,之后连续往前推九组,即为从vn
‑
9到vn;s04:之后获取到速度参值组vj,j=n
‑
9、...、n;之后对速度参值组进行均值求取,将均值标记为pv;s05:之后将满足vj
‑
pv≥x3的速度参值组留下后。重新进行均值求取;s06:将重新求取得到的均值标记为目标速值mv;s07:之后计算实时安值az,具体计算公式为:az=0.532*mv 0.468*rg;式中,各个计算因素均为去除量纲后计算;步骤四:在安值az超过预设值x4时产生停止信号,在产生停止信号时会自动切断显示单元的显示,同时会切断头盔与手机之间的联系;步骤五:在连通的情况下进行手机与头盔之间互动,通过仪表蓝牙端进行语音采集作用,并自动进行语音采集操作,语音采集操作具体步骤为:ss01:首先进行实时环境声音采集,具体采集步骤为:ss011:在开始时,采集t4时长的背景语音;ss012:之后当t4时间后,若没有检测到用户的声音信息,则持续进行背景语音采集;同时会在每新录入一个单位的时间录制的背景语音时,会将初始的单位时间段的背景语音删除;ss013:当测到用户声音信息时,会获取t4时间的环境声音;ss02:之后自动获取到用户的声音信息;ss03:将声音信息标记为综合声音;ss04:同时将环境声音标记为背景声音;ss05:在综合声音中去除背景声音,得到纯净人声;ss06:对纯净人声进行语音转文字,并进行指令识别,获取到用户指令;步骤六:根据用户指令实行相应命令。
19.一种智能头盔用基于深度学习的语音识别系统,在工作时,通过进行安全判定,测
量在摩托车左右两侧的距离,将左侧和右侧的距离对应的标记为左向距离和右向距离;根据二者判定此时摩托车经过了多少车辆,从而判定用户是否处于危险情况,给予一定的技术上的数据支持;通过对左向个数和右向个数进行单向融合分析,得到一个能综合表现车辆多寡的参数,即为融向个数;之后结合摩托车的实时速度进行安值分析,得到安值az,在安值az超过预设值x4时产生停止信号,在产生停止信号时会自动切断显示单元的显示,同时会切断头盔与手机之间的联系;在连通的情况下进行手机与头盔之间互动,通过仪表蓝牙端进行语音采集作用,并自动进行语音采集操作,在此过程中通过预设背景的方式进行降噪处理;本发明简单有效,且易于实用。
20.以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。