1.本发明涉及智能穿戴设备领域,尤其涉及一种辅助盲人出行的手环避障导航系统及方法。
背景技术:
2.可穿戴设备即直接穿在身上,或是整合到用户的衣服或配件的一种便携式设备;可穿戴设备不仅仅是一种硬件设备,更是通过软件支持以及数据交互、云端交互来实现强大的功能,可穿戴设备将会对我们的生活、感知带来很大的转变;手环本来应该是一种装饰品,不过这只是当智能科技推开了它的大门之前的事情了;现在的它正在尝试记录用户的健身效果、睡眠质量、饮食安排和习惯等一系列相关的数据,并且可以将这些数据同步到用户的移动终端设备中,终端设备可能会根据自己的“分析功能”给出相关建议,起到通过数据指导健康生活的作用;它可以说是一款高档的计步器,具有普通计步器的一般计步和测量距离、热量、脂肪等功能,同时还具有睡眠监测、高档防水、蓝牙4.0数据传输、疲劳提醒等特殊功能。
3.现有技术中,智能手环针对正常用户的功能升级越来越丰富,但是针对盲人这一小众群体的改进缺微乎其微,盲人的出行问题是最需要解决的问题,市面上现有的手环虽然出现一部分针对盲人的改进,但是针对盲人出行安全问题的却少之又少,盲人出行最大的问题主要在于方向和避障问题,针对这两个问题市面上还没有出现有效的解决方法,故亟需一种新的手环导航避障方法以解决盲人出行的问题。
技术实现要素:
4.针对上述技术中存在的不足之处,本发明提供一种辅助盲人出行的手环避障导航系统及方法,通过在手环上设置多个线性马达配合导航信息,根据导航的路线信息控制对应方向的线性马达进行振动从而为盲人进行方向导航,同时设置红外传感器与线性马达进行配合,从而在导航的同时通过线性马达进行避障提示,有效的保证了盲人出行的方向准确性和安全性。
5.为实现上述目的,本发明提供一种辅助盲人出行的手环避障导航方法,手环的表头内和手环位于表头的两侧和后方均配置有线性马达和红外传感器,表头还配置有用于与移动设备进行数据传输的传输模块,避障导航方法包括:手环通过传输模块与移动设备建立连接,获取来自移动设备的卫星定位信息和路线信息;根据卫星定位信息和路线信息实时判断用户前进方向是否处于正确的路线方向,同时红外传感器持续工作检测环境内的障碍物,当红外传感器检测到环境内存在障碍物时,对应位置的线性马达以第一振动模式进行振动。
6.当判定结果为否时,识别正确路线方向位于前进方向的方位,手环根据识别的方位控制相对应方向位置的线性马达以第二振动模式进行振动。
7.具体的:第一振动模式的振动强度和/或振动频率与第二振动模式不同。
8.具体的:当红外传感器检测到环境内存在障碍物时同时检测手环到障碍物的距离,第一振动模式的振动状态根据检测到的距离发生变化。
9.作为优选:红外传感器距离障碍物的距离由远而近分为多个预设的距离区间,第一振动模式根据多个预设的距离区间分为多个对应的振动状态,当红外传感器识别手环到障碍物的距离进入其中一个预设的距离区间时,控制对应位置的线性马达进入对应的振动状态。
10.作为优选:当判断用户前进方向没有处于正确的路线方向的同时,红外传感器检测到环境内存在障碍物时,第一振动模式的优先级大于第二振动模式的优先级。
11.一种辅助盲人出行的手环避障导航系统,手环的表头内和手环位于表头的两侧和后方均配置有线性马达和红外传感器,表头还配置有用于与移动设备进行数据传输的传输模块,表头还包括控制组件和判定模块;手环的控制组件通过传输模块与移动设备建立连接,获取来自移动设备的卫星定位信息和路线信息;判定模块根据卫星定位信息和路线信息实时判断用户前进方向是否处于正确的路线方向,同时红外传感器持续工作检测环境内的障碍物,当红外传感器检测到环境内存在障碍物时,控制组件控制对应位置的线性马达以第一振动模式进行振动。
12.当判定模块的判定结果为否时,控制组件识别正确路线方向位于前进方向的方位,手环的控制组件根据识别的方位控制相对应方向位置的线性马达以第二振动模式进行振动。
13.具体的:线性马达产生的第一振动模式的振动强度和/或振动频率与第二振动模式不同。
14.具体的:当红外传感器检测到环境内存在障碍物时同时检测手环到障碍物的距离,线性马达产生的第一振动模式的振动状态根据检测到的距离发生变化。
15.作为优选:红外传感器检测距离障碍物的距离由远而近分为多个预设的距离区间,线性马达产生的第一振动模式根据多个预设的距离区间分为多个对应的振动状态,当红外传感器检测到障碍物的距离进入其中一个预设的距离区间时,控制组件控制对应位置的线性马达进入对应的振动状态。
16.作为优选:当判定模块判断用户前进方向没有处于正确的路线方向的同时,红外传感器检测到环境内存在障碍物时,控制组件控制线性马达产生第一振动模式的优先级大于线性马达产生第二振动模式的优先级。
17.本发明的有益效果是:与现有技术相比,本发明提供的一种辅助盲人出行的手环避障导航系统及方法,手环的表头内和手环位于表头的两侧和后方均配置有线性马达和红外传感器,表头还配置有用于与移动设备进行数据传输的传输模块, 手环通过传输模块与移动设备建立连接,获取来自移动设备的卫星定位信息和路线信息;根据卫星定位信息和路线信息的实时判断用户前进方向是否处于正确的路线方向,同时红外传感器持续工作检测环境内的障碍物,当红外传感器检测到环境内存在障碍物时,对应位置的线性马达以第一振动模式进行振动;当判定结果为否时,识别正确路线方向位于前进方向的方位,手环根据识别的方位控制相对应方向位置的线性马达以第二振动模式进行振动;通过在手环上设
置多个线性马达配合导航信息,根据导航的路线信息控制对应方向的线性马达进行振动从而为盲人进行方向导航,同时设置红外传感器与线性马达进行配合,从而在导航的同时通过线性马达进行避障提示,有效的保证了盲人出行的方向准确性和安全性。
附图说明
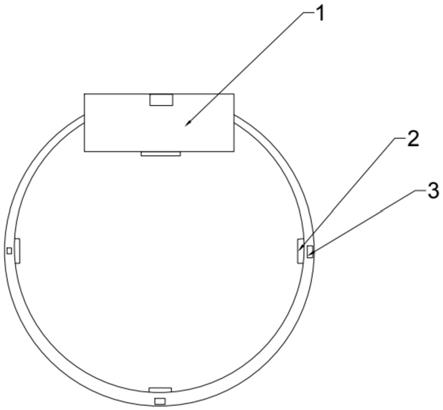
18.图1为本发明的方法流程图;图2为本发明的结构示意图;图3为本发明的系统原理图。
19.主要元件符号说明如下:1、表头;2、线性马达;3、红外传感器;4、传输模块;5、判定模块;6、控制组件。
具体实施方式
20.为了更清楚地表述本发明,下面结合附图对本发明作进一步地描述。
21.现有技术中,智能手环针对正常用户的功能升级越来越丰富,但是针对盲人这一小众群体的改进缺微乎其微,盲人的出行问题是最需要解决的问题,市面上现有的手环虽然出现一部分针对盲人的改进,但是针对盲人出行安全问题的却少之又少,盲人出行最大的问题主要在于方向和避障问题,针对这两个问题市面上还没有出现有效的解决方法,故亟需一种新的手环导航避障方法以解决盲人出行的问题。
22.为解决现有技术中的缺陷和不足,本发明具体的提供一种辅助盲人出行的手环避障导航系统及方法,请参阅图1
‑
图2,一种辅助盲人出行的手环避障导航方法,手环的表头1内和手环位于表头1的两侧和后方均配置有线性马达2和红外传感器3,表头1还配置有用于与移动设备进行数据传输的传输模块4,避障导航方法包括:手环通过传输模块4与移动设备建立连接,获取来自移动设备的卫星定位信息和路线信息;根据卫星定位信息和路线信息实时判断用户前进方向是否处于正确的路线方向,同时红外传感器3持续工作检测环境内的障碍物,当红外传感器3检测到环境内存在障碍物时,对应位置的线性马达2以第一振动模式进行振动。
23.当判定结果为否时,识别正确路线方向位于前进方向的方位,手环根据识别的方位控制相对应方向位置的线性马达2以第二振动模式进行振动;当判定结果为是时,证明用户处于正确的前进路线和方向上,此时红外传感器3持续工作用于识别障碍物;在实际应用时,由于人体佩戴手环时通常表头1朝上位于手背方向,用户将表头1对着前进方向即默认表头1方向为前进方向,此时位于表头1内的线性马达2执行第二振动模式,第二振动模式为一阵短促的振动,以提示用户需要朝此方向前进;当运动至需要转弯的路口时,手环根据原始规划的路线识别正确路线方向位于前进方向的方位,手环根据识别的方位控制相对应方向位置的线性马达2执行第二振动模式进行振动,以提示用户在此处进行相对方位的转弯,在这之中,若是转弯路线的方位介于两个线性马达2之间的位置方位,则同时控制此两个马达同时执行第二振动模式进行振动,以提示用户转向该方向;在线性马达2执行第二振动模式进行振动导航的过程中,红外传感器3是持续工作的,持续检测
是否有障碍物进入红外传感器3的识别范围内,当识别到障碍物进入识别范围时,识别到障碍物的对应红外线传感器的对应位置的线性马达2以第一振动模式进行振动,以提示用户该方向有障碍物,同样的,当识别到的障碍物同时被两个红外传感器3识别到时,意味着障碍物位于两个红外传感器3之间的方向,则此时控制两个识别到障碍物的对应红外线传感器的对应位置的两个线性马达2同时以第一振动模式进行振动,以提示用户。
24.在本实施例中提及:第一振动模式的振动强度和/或振动频率与第二振动模式不同;优选的,第一振动模式为频率由慢变快的振动方式,此方式主要是为了适应障碍物距离人体的距离而设置,当障碍物远离人体的时候则为频率较低的振动,当越接近障碍物时,振动频率越高,以合理的提示用户障碍物的距离;第二振动模式主要是在临近路口时起到提示的作用,故只需要区别于第一振动模式,采用一阵短促的振动以提示用户。
25.优选的,第一振动模式可以为持续振动的模式,当障碍物远离人体的时候则为强度较低的振动,当越接近障碍物时,振动强度越高。
26.在本实施例中提及:当红外传感器3检测到环境内存在障碍物时同时检测手环到障碍物的距离,第一振动模式的振动状态根据检测到的距离发生变化;由于人体是处于位置不断变化的状态,故距离障碍物的距离和方向也是不断变化的,故设置振动状态为动态变化的方式,通过障碍物的方向控制组件6调用对应方向上的线性马达2进行不同距离对应不同的振动状态以达到提示用户障碍物的远近的作用。
27.在一个优选的实施例中提及:红外传感器3距离障碍物的距离由远而近分为多个预设的距离区间,第一振动模式根据多个预设的距离区间分为多个对应的振动状态,当红外传感器3识别手环到障碍物的距离进入其中一个预设的距离区间时,控制对应位置的线性马达2进入对应的振动状态;实施例1:红外传感器3的感应距离为2m,将2m感应距离分为3个预设距离区间:2m
‑
1m为第一预设区间,1m
‑
0.5m为第二预设区间,0.5m
‑
0.2m为第三预设区间;振动的强度从第一预设区间到第三预设区间依次递增,以提示用户距离障碍物的距离。
28.实施例2:红外传感器3的感应距离为2m,将2m感应距离分为3个预设距离区间:2m
‑
1m为第一预设区间,1m
‑
0.5m为第二预设区间,0.5m
‑
0.2m为第三预设区间;振动的频率从第一预设区间到第三预设区间依次递增,在第三预设区间时,以连续不断的振动来知道足够的提示作用,以保证用户的安全;以提示用户距离障碍物的距离。
29.实施例3:红外传感器3的感应距离为2m,将2m感应距离分为4个预设距离区间:2m
‑
1.5m为第一预设区间,1.5m
‑
1m为第二预设区间,1m
‑
0.5m为第三预设区间,0.5m
‑
0.2m为第四预设区间;振动的强度从第一预设区间到第四预设区间依次递增,以提示用户距离障碍物的距离。
30.在一个优选的实施例中提及:当判断用户前进方向没有处于正确的路线方向的同时,红外传感器3检测到环境内存在障碍物时,第一振动模式的优先级大于第二振动模式的优先级;在优先级的排定里,避障的优先级是先于导航的,在同时需要转向的路口时,此时应该在对应方向的线性马达2发出第二振动模式,但是若在此位置识别到障碍物时,则优先启动第一振动模式帮助用户进行避障,此设置主要的目的是将用户的生命安全作为主要考虑。
31.实施例1:用户根据手环的第一振动模式的振动指示行走至需要转向的路口时,该
路口为右转路口,路口的中央有一电线杆;此时手环根据规划的路线,需要对即将转入的右方向通过线性马达2进行第二振动模式,但是由于右侧出现电线杆的障碍物,故此时红外传感器3识别到障碍物将此信息传输至表头1,表头1将原本的第二振动模式信号屏蔽并形成第一振动模式信号至检测到障碍物的红外感应器对应位置的线性马达2,使其产生第一振动模式。
32.一种辅助盲人出行的手环避障导航系统,请参阅图1
‑
图3,手环的表头1内和手环位于表头1的两侧和后方均配置有线性马达2和红外传感器3,表头1还配置有用于与移动设备进行数据传输的传输模块4,表头1还包括控制组件6和判定模块5;手环的控制组件6通过传输模块4与移动设备建立连接,获取来自移动设备的卫星定位信息和路线信息;判定模块5根据卫星定位信息和路线信息实时判断用户前进方向是否处于正确的路线方向,同时红外传感器3持续工作检测环境内的障碍物,当红外传感器3检测到环境内存在障碍物时,控制组件6控制对应位置的线性马达2以第一振动模式进行振动;当判定模块5的判定结果为否时,控制组件6识别正确路线方向位于前进方向的方位,手环的控制组件6根据识别的方位控制相对应方向位置的线性马达2以第二振动模式进行振动。
33.当判定结果为是时,证明用户处于正确的前进路线和方向上,此时红外传感器3持续工作用于识别障碍物;在实际应用时,由于人体佩戴手环时通常表头1朝上位于手背方向,用户将表头1对着前进方向即默认表头1方向为前进方向,此时位于表头1内的线性马达2执行第二振动模式,第二振动模式为一阵短促的振动,以提示用户需要朝此方向前进;当运动至需要转弯的路口时,手环根据原始规划的路线识别正确路线方向位于前进方向的方位,手环根据识别的方位控制相对应方向位置的线性马达2执行第二振动模式进行振动,以提示用户在此处进行相对方位的转弯,在这之中,若是转弯路线的方位介于两个线性马达2之间的位置方位,则同时控制此两个马达同时执行第二振动模式进行振动,以提示用户转向该方向;在线性马达2执行第二振动模式进行振动导航的过程中,红外传感器3是持续工作的,持续检测是否有障碍物进入红外传感器3的识别范围内,当识别到障碍物进入识别范围时,识别到障碍物的对应红外线传感器的对应位置的线性马达2以第一振动模式进行振动,以提示用户该方向有障碍物,同样的,当识别到的障碍物同时被两个红外传感器3识别到时,意味着障碍物位于两个红外传感器3之间的方向,则此时控制两个识别到障碍物的对应红外线传感器的对应位置的两个线性马达2同时以第一振动模式进行振动,以提示用户。
34.在本实施例中提及:线性马达2产生的第一振动模式的振动强度和/或振动频率与第二振动模式不同,由于是采用振动作为提示盲人的要素,故第一振动模式和第二振动模式的振动模式应该区别开,可以从振动的强度和频率进行区别,这样能够避免用户在使用时识别错误导致发生错误的导航和避障。
35.在本实施例中提及:当红外传感器3检测到环境内存在障碍物时同时检测手环到障碍物的距离,线性马达2产生的第一振动模式的振动状态根据检测到的距离发生变化;由于人体是处于位置不断变化的状态,故距离障碍物的距离和方向也是不断变化的,故设置振动状态为动态变化的方式,通过障碍物的方向控制组件6调用对应方向上的线性马达2进
行不同距离对应不同的振动状态以达到提示用户障碍物的远近的作用。
36.在一个优选的实施例中提及:红外传感器3检测距离障碍物的距离由远而近分为多个预设的距离区间,线性马达2产生的第一振动模式根据多个预设的距离区间分为多个对应的振动状态,当红外传感器3检测到障碍物的距离进入其中一个预设的距离区间时,控制组件6控制对应位置的线性马达2进入对应的振动状态。
37.在一个优选的实施例中提及:当判定模块5判断用户前进方向没有处于正确的路线方向的同时,红外传感器3检测到环境内存在障碍物时,控制组件6控制线性马达2产生第一振动模式的优先级大于线性马达2产生第二振动模式的优先级;在优先级的排定里,避障的优先级是先于导航的,在同时需要转向的路口时,此时应该在对应方向的线性马达2发出第二振动模式,但是若在此位置识别到障碍物时,则优先启动第一振动模式帮助用户进行避障,此设置主要的目的是将用户的生命安全作为主要考虑。
38.实施例1:用户根据手环的第一振动模式的振动指示行走至需要转向的路口时,该路口为右转路口,路口的中央有一电线杆;此时手环根据规划的路线,需要对即将转入的右方向通过线性马达2进行第二振动模式,但是由于右侧出现电线杆的障碍物,故此时红外传感器3识别到障碍物将此信息传输至表头1,表头1将原本的第二振动模式信号屏蔽并形成第一振动模式信号至检测到障碍物的红外感应器对应位置的线性马达2,使其产生第一振动模式。
39.本发明的优势在于:1、通过在手环上设置多个线性马达配合导航信息,根据导航的路线信息控制对应方向的线性马达进行振动从而为盲人进行方向导航。
40.2、同时设置红外传感器与线性马达进行配合,从而在导航的同时通过线性马达进行避障提示,有效的保证了盲人出行的方向准确性和安全性。
41.以上公开的仅为本发明的几个具体实施例,但是本发明并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。