1.本发明属于室内定位导航领域,特别是涉及一种基于移动终端众包数据的 室内导航路网提取方法。
背景技术:
2.近年来,随着现代化进程加快,大型公共建筑和场所如雨后春笋般增加,室 内空间的范围与日俱增。这些都导致了大量的室内服务被人们所需要,而位置服 务离不开室内导航系统的支持。其中,室内导航网络又是室内导航研究的基础。 因此,如何自动生成室内导航网络已成为近年来的研究热点。
3.室内导航网络在室内定位和导航中有着不可或缺的用途,例如购物中心的 定位服务和博物馆的导航服务。目前,室内导航网络的生成往往是通过室内建 筑计算机辅助设计cad(computer aided design cad)图纸或激光雷达同步定位 和建图(laser radar simultaneous localization and mapping,slam)等方法来实 现,这些方法既繁琐又昂贵。此外,如此生成的导航网络容易受到外部环境变 化的影响。因此,一种实用且廉价的动态构建室内导航网络的方法具有重要的 价值和必要性。
4.为了解决以上问题,专利公开(公告)号cn111288999a公开了一种基于 移动终端的行人路网属性检测方法、装置和设备,在获得室外移动终端传感器 数据后进行数据处理、机器学习得到道路属性,并将道路属性赋给现有的行人 路网,得到带有属性信息的路网数据。该方法对路网处理重点在于对室外数据 判断生成路网属性,未能针对路网如何构建提出有效的方法。专利公开(公 告)号cn 109472416 a公开了基于自动路网数据提取的室内路径规划方法及装 置、客户端,该方法通过对室内分布图进行图像处理提取路径骨架,通过路径 骨架信息生成路网数据结构。该方法过于依赖静态的室内信息,忽视了室内结 构复杂,现实环境多变的情况,难以有效得出符合实际情况的路网。
技术实现要素:
5.针以上问题,本发明提供一种基于移动终端众包数据的室内导航路网提取 方法,解决现有室内导航网络构建技术中存在的投入较大、实现繁琐、不便于 动态修改等问题。
6.本发明提供一种基于移动终端众包数据的室内导航路网提取方法,具体包 括以下步骤:
7.步骤1,获取行人众包室内运动数据,结合定位算法进行轨迹解算:采用 粒子群定位算法结合多源数据解算出室内轨迹;
8.步骤2,基于st
‑
dbscan算法去除冗余轨迹点,同时对室内特定区域内 的轨迹点增添语义信息;
9.基于st
‑
dbscan算法去除冗余轨迹点,同时对室内特定区域轨迹点增添 语义信息,具体步骤为:
10.步骤2.1,根据实际情况设定停留时间阈值t
th
、空间距离阈值s
th
、最小点 数
minpts,同时相对于原始的st
‑
dbscan算法,增加速度阈值v
th
作为约束条 件,对轨迹点进行游荡点和停滞点判定;
11.步骤2.2,对上述游荡点与停滞点组成的冗余点进行局部密度计算:
[0012][0013]
其中,ρ
i
为局部密度,d
ij
为轨迹点i和轨迹点j之间的空间距离;d
c
是半 径阈值;sign(x)函数为判定函数:当x<0时,sign(x)=
‑
1,当x=0时, sign(x)=0,当x>0时,sign(x)=1,计算各区域所有冗余点的局部密度,找 到局部密度最大的轨迹核心点m,以该核心点为圆心,d
c
为半径,计算邻域内 所有点的坐标平均值,令其为聚类中心点;
[0014]
步骤2.3,根据所获多源数据中的加速度、角速度、气压计数值和wifi信 号变换情况,综合判定轨迹点所在区域范围;
[0015]
步骤2.4,对轨迹点添加室内语义信息;
[0016]
步骤3,基于douglas
‑
peucker抽稀算法算对行人室内轨迹进行轨迹压缩, 构建原始室内语义路网;
[0017]
基于douglas
‑
peucker抽稀算法对解算出来的行人室内轨迹进行轨迹点数压 缩,构建原始室内语义路网,具体步骤为:
[0018]
步骤3.1,根据运动情况设定期望的压缩轨迹节点数上限μ,节点数上限 μ可以取轨迹点数的5%,保证轨迹得到足够程度的压缩;
[0019]
步骤3.2,相对于原始的douglas
‑
peucker抽稀算法,设定自适应距离阈值 代替统一的距离阈值,第一次压缩时,取最远点距离d作为临时距离阈值δ1, 随着压缩点数的增加,阈值δ以一定步长减小,下一个压缩点距离阈值δ2按照 如下公式进行自动衰减:
[0020][0021]
其中,r为当前最远点距连接点的距离;
[0022]
步骤3.3,对每一次节点数的增加,计算当前压缩轨迹与原始轨迹的相似度 并记录,继续减小阈值,当节点数大于期望节点数上限的时候,对期望节点数 范围内的所有轨迹压缩情况进行压缩度和相似度的综合评价,选取最优轨迹, 压缩后的最优轨迹集为{t1,t2,...,t
n
};
[0023]
步骤4,对新的行人室内数据进行轨迹解算,同时和原始室内语义路网进 行匹配处理,更新原始路网。
[0024]
作为本发明进一步改进,步骤2.4中对轨迹点添加室内语义信息包括廊 道,房间和楼梯口。
[0025]
作为本发明进一步改进,所述步骤4中,对新的行人室内数据进行轨迹解 算,同时和原始室内语义路网进行相似度计算与匹配处理,更新原始路网,具 体步骤为:
[0026]
步骤4.1,将新产生的行人室内轨迹按照转折点进行分段{l1,l2,...,l
i
},计 算各段行人轨迹子集和路网轨迹集{t1,t2,...,t
n
}的轨迹相似度评分 空
间距离评分及轨迹信息中各点 wifi信号强度比较评分最后,联合上述评分进 行加权{ω1,ω2,ω3}投票,得出投票结果{q1,q2,...,q
i
};
[0027]
步骤4.2,若投票结果表示新轨迹和路网相似,则设定轨迹节点到路网节点 距离的阈值,小于该阈值的轨迹节点由相应的路网节点代替;设定轨迹节点到 路网线段距离的阈值,小于该阈值的轨迹节点由该节点在某路网线段的投影点 所代替;
[0028]
步骤4.3,若投票结果表示新轨迹和路网非相似或不满足上述阈值条件的节 点为新节点,不做任何约束操作。在此之后使用新节点的轨迹信息更新原始路 网的数据库。
[0029]
本发明与现有技术相比的优点在于:
[0030]
针对当前室内路网构建技术存在投入较大、实现繁琐、不便于动态修改等 技术问题,本发明提出了一种基于移动终端众包数据的室内导航路网提取方 法。首先通过对室内行人众包数据进行提取,解算得到行人轨迹;采用st
‑ꢀ
dbscan算法去除冗余轨迹点,结合运动数据信息判定轨迹点所在区域,增添语 义信息;基于douglas
‑
peucker抽稀算法对解算出来的行人室内轨迹进行轨迹压 缩,构建原始室内语义路网;该室内导航网络在后续获得新的轨迹时,会自动 进行更新和优化,同时可以对后续轨迹进行约束和匹配,提高定位精度。面对 未知环境和动态环境时,相比背景技术方法该方法获取速度快、效率高、成本 低。
附图说明
[0031]
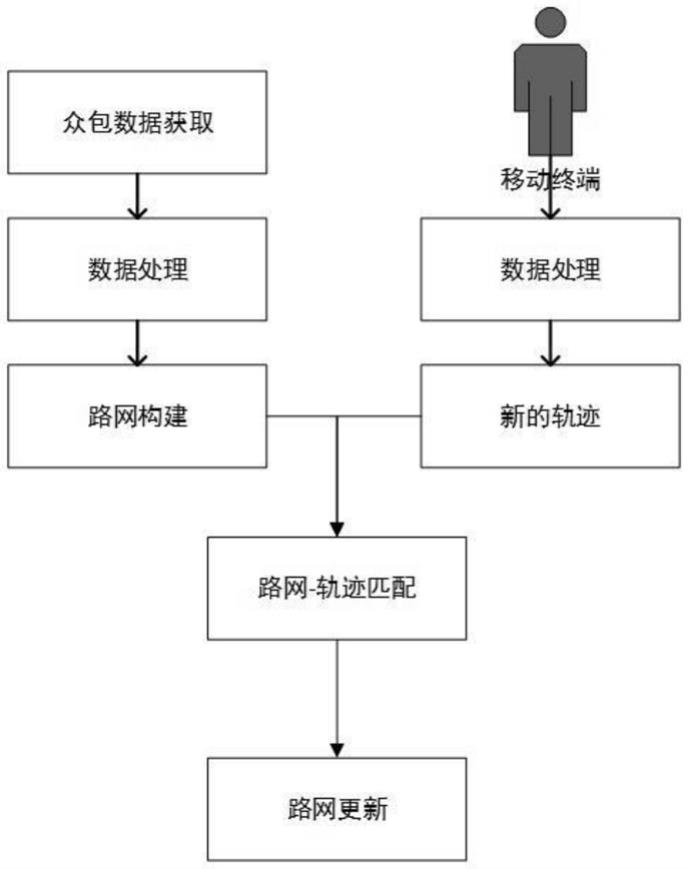
图1为本发明路网提取的流程图;
[0032]
图2为移动终端众包数据采集和处理示意图;
[0033]
图3为路网构建的数据处理过程流程图。
具体实施方式
[0034]
下面结合附图与具体实施方式对本发明作进一步详细描述:
[0035]
本发明提供一种基于移动终端众包数据的室内导航路网提取方法,解决现 有室内导航网络构建技术中存在的投入较大、实现繁琐、不便于动态修改等问 题。
[0036]
作为本发明具体实施例,本发明所采用的技术方案为:
[0037]
步骤s1:获取行人众包室内运动数据,结合定位算法进行轨迹解算。具体 包括:
[0038]
s1.1:根据室内消防地图或平面图绘制好室内地图,对绘制好的室内地图 采用自研软件算法进行线特征提取,将室内地图转化为具有墙壁特征的地图向 量矩阵。
[0039]
s1.2:从众包数据库中获取移动终端众包数据。众包数据经过初步有效性 筛选,包含三轴陀螺仪信息、三轴加速度信息、wifi信号信息和气压计信息。 具体如图2所示。
[0040]
s1.3:对所获得到的移动终端众包数据采用粒子群算法进行多源信息融合 定位,多源信息包括pdr定位信息、地图约束信息和wifi信号信息。首先根据 wifi定位结果确定目标的初始位置,利用pdr定位输出结果作为状态转移量对 粒子群进行状态转移更新。对地图向量矩阵和轨迹向量矩阵进行判断,得到行 人室内轨迹与墙壁的交叉点,即穿墙点;将粒子群中穿墙的粒子进行权重归 零,得到地图信息修正后的粒子群;
[0041]
s1.4:粒子滤波完成后,计算出粒子群所表示的最优值,得到最优坐标, 即最优行人室内轨迹。
[0042]
步骤s2:基于st
‑
dbscan算法去除冗余轨迹点,同时对室内特定区域内的 轨迹点增添语义信息,具体包括:
[0043]
s2.1:根据实际情况设定停留时间阈值t
th
、空间距离阈值s
th
、最小点数 minpts,同时相对于原始的st
‑
dbscan算法,增加速度阈值v
th
作为约束条 件,对轨迹点进行游荡点和停滞点判定。
[0044]
s2.2:对上述游荡点与停滞点组成的冗余点进行局部密度计算:
[0045][0046]
其中,ρ
i
为局部密度,d
ij
为轨迹点i和轨迹点j之间的空间距离;d
c
是半 径阈值;sign(x)函数为判定函数:当x<0时,sign(x)=
‑
1,当x=0时, sign(x)=0,当x>0时,sign(x)=1。计算各区域所有冗余点的局部密度,找 到局部密度最大的轨迹核心点m。以该核心点为圆心,d
c
为半径,计算邻域内 所有点的坐标平均值,令其为聚类中心点;在其半径阈值范围内计算聚类中心 点,其坐标为:
[0047]
s2.3:根据所获多源数据中的加速度、角速度、气压计数值和wifi信号 变换情况,综合判定轨迹点所在区域范围。由于上下楼梯运动姿态的不同,导 致角速度差异性显著,因此,通过角速度{p,q,r}可以判定楼梯节点。当在室内 某个区域,轨迹点合角速度始终稳定在0
‑
4rad/s之间,气压 计持续变换,且wifi信号探测到的rssi值异常波动,则判定该区域为楼梯区 域;由于行人在设施内部会产生更多停留,因此当同一轨迹下轨迹点在某区域 停留时间较长并且移动速度很慢,则判定该区域为设施内部区域;对轨迹点添 加室内语义信息。
[0048]
步骤s3:基于douglas
‑
peucker抽稀算法算出来的行对解人室内轨迹进行 轨迹压缩,构建原始室内语义路网,具体包括:
[0049]
s3.1:根据运动情况设定期望的压缩轨迹节点数上限μ,节点数上限μ可 以取轨迹点数的5%,保证轨迹得到足够程度的压缩;
[0050]
s3.2:相对于原始的douglas
‑
peucker抽稀算法,设定自适应距离阈值代替 统一的距离阈值。第一次压缩时,取最远点距离d作为临时距离阈值δ1。随着 压缩点数的增加,阈值δ以一定步长减小。下一个压缩点距离阈值δ2按照如下 公式进行自动衰减:
[0051][0052]
其中,r为当前最远点距连接点的距离。
[0053]
s3.3:对每一次节点数的增加,通过dtw算法计算当前压缩轨迹与原始轨 迹的相似度并记录。继续减小阈值,当节点数大于期望节点数上限的时候,对 期望节点数范围内的所有轨迹压缩情况进行压缩度和相似度的综合评价,选取 最优轨迹。压缩后的最优轨迹集为{t1,t2,...,t
n
}。
[0054]
s3.4:在室内交叉口附近,轨迹t
i
会产生转向点;同时,轨迹t
a
,t
b
彼此 之间会产生交叉节点。当转向点足够多时,该区域为室内路网的路口节点。为 了保留真实的转向点和交叉节点,采用聚类算法去除轨迹偏差带来的噪声交叉 点。完成所有节点的聚合之后,连接各聚类中心即完成节点路网的重建。节点 路网以点形式储存为一个很小的文本文件,用以方便可视化。
[0055]
步骤s4,对新的行人室内数据进行轨迹解算,同时和原始室内语义路网进 行相似度计算和匹配处理,更新原始路网。具体步骤为:
[0056]
s4.1:将新产生的行人室内轨迹按照转折点进行分段{l1,l2,...,l
i
},计算各 段行人轨迹子集和路网轨迹集{t1,t2,...,t
n
}的轨迹相似度评分 空间距离评分及轨迹信息中各点 wifi信号强度比较评分最后,联合上述评分进 行加权{ω1,ω2,ω3}投票,得出投票结果{q1,q2,...,q
i
},具体计算公式如下: q=ω1s
ni
ω2d
ni
ω3rssi
ni
;
[0057]
s4.2:若投票结果表示新轨迹和路网相似,则设定轨迹节点到路网节点距 离的阈值,小于该阈值的轨迹节点由相应的路网节点代替;设定轨迹节点到路 网线段距离的阈值,小于该阈值的轨迹节点由该节点在某路网线段的投影点所 代替;
[0058]
s4.3:若投票结果表示新轨迹和路网非相似或不满足上述阈值条件的节点为 新节点,不做任何约束操作。在此之后使用新节点的轨迹信息更新原始路网的 数据库。
[0059]
以上所述,仅是本发明的较佳实施例之一,并非是对本发明作任何其他形 式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发 明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。