1.本发明涉及用于控制农业生产的方法和系统的技术领域,并且更具体地,涉及用于使用布置在农业机械中的传感器收集数据以便优化耕作、农业机具的使用和播种的方法和系统。
背景技术:
2.目前,使用机具或农业机具来整地和后续播种农作物是农业中与正确种植作物相关的最重要的任务之一。
3.与整地和对土壤播种相关联的任务(破碎、疏松或混合土壤;销毁、掩埋或混合废弃物;调平等......)的能量成本迫使农民选择是否执行每项任务,有时出于经济原因而省掉它们中的一项,从而损害了利用其生长作物的优点。
4.该行业中的趋势是要优化农业任务,以便建立耕作的最佳管理,在更少的通过或甚至在单个通过中集成在土地上的若干任务。因此,在准备农业用地的任务期间,了解土壤的状态是有必要的,这使得能够在整地和播种两者中关于要利用农业机具实行的工作进行评估、规划和决策。
5.土壤的机械参数(诸如硬度、可塑性或湿度)影响将农业任务中使用的设备的最佳配置,出于该原因,了解这些参数使得能够优化任务的执行、降低成本,并且甚至使得能够选择性地扩大这些任务的使用。另外,这种优化增加了农业工具的寿命,避免了破损,破损会增加完成时间且降低任务生产率,从而增加农业任务的费用。
6.现有技术借助于使用与农业机械相关联的传感器提供了用于数据收集的不同解决方案,利用这些传感器来确定农业用地的不同参数。例如,传感器的使用多年来已经被知晓,以便通过称重谷物、测量谷物的水分或作物的其他特性、寻求捕获关于作物的信息来确定作物的状态或实时修改农产品的施用剂量。
7.用于土壤的机械研究的其他解决方案设想使用能够确定土地参数的传感器,其借助于在静止时取样或提取小部分以用于后续化学分析,这使得能够确定ph和其他参数。
8.还知晓解决方案,其选择数据收集以用于后续电导率分析,并且甚至是土壤的光学确定,将其与土地的成分(例如有机物质)相关联,以便在作物播种时改变种子的剂量。
9.然而,现有技术提供的所有解决方案排他地意图用于作物、其在生长和种子播种期间的特定状态,考虑到例如土壤的有机特性。然而,到目前为止,还没有能够实时有效地确定土壤的机械状态的提议,利用该机械状态使得能够优化使用农业机具来进行整地和播种。
10.例如,专利申请us 20160262300 a1公开了一种根据土壤条件动态调整犁铧的装置,但是其操作基于涉及雷达、温度或土壤成分测量的传感器。这种方法的问题是,即使假设可以实时得出结论,结论也过于笼统,因为它们涉及与犁铧的动作没有严格联系的土地区域。
11.在另一条线的工作中,用于确定应用于土壤力学的振动的算法是已知的,能够分
析土地的承载能力,但是总是基于振动传感器和振动信息的被动处理,其中,设备安装在特定方位中,例如,铁路轨道的特定方位,以便分析铁路平台的行为和面对其位置(轨道车辆)外部的激励时的土壤/结构相互作用,并且测量该环境如何随时间演变。
12.由于所有上述原因,明显的是,现有技术缺乏一种用于基于土壤机械状态的实时精确确定来控制农业生产的动态解决方案,这将符合诸如保护性耕作、直接播种或精确农业之类的技术,所述技术的实践被农业技术人员广泛接受为是合适的。当前对这些实践的高需求,结合可预见的机器人农学的演化,预示任何这种类型的解决方案的真正的未来。
技术实现要素:
13.为了实现目的并且避免上述缺点,本发明基于对通过移动传感器所获得的测量值的分析,其中,在这种情况下(拖拉机/农业机具)的激励关于正在被检查的对象(农业土壤)是动态的,这导致从多个方位获得的数据的大量提取,这些数据一旦被处理,就提供一系列参数,这些参数确定了工作土地的不同类型/行为的关系。
14.为此,本发明在第一方面描述了一种用于确定农业用地的机械状态的方法,包括以下步骤:
‑
借助于布置在农业机械的耕作元件中的传感器部件获得振动信号的测量值,其中,振动信号是由于农业机械在农业用地上的耕作操作而产生的;
‑
由通信部件将被归类到数据分组中(以便优化其电气消耗)的从振动信号获得的测量值发送到处理器模块;
‑
由处理器模块将归类到数据分组中的振动信号的测量值变换成频率信号;
‑
从频率信号开始计算能量测量值;以及
‑
基于频率信号的能量测量值,确定农业用地的机械状态,其中,所确定的机械状态包括硬性的程度和可塑性的程度。
15.处理器模块将测量值传递到频域,这使得其能够从频率信号开始计算能量测量值,诸如功率谱密度(psd)信号或能谱密度,由此可以滤波和确定在构成农业机具的元件中产生的振动。因此,有利地实现了对土壤机械状态的动态和实时的自动分析,以及对用于耕作和播种的农业机具中的元件如何作用于土地的结果的自动分析,并且使得能够留下最佳的可能床,以便优化作物的后续种植。
16.频域中的处理使得能够通过建立能量参数来处理信息(诸如振动),该能量参数使得能够消除由传感器获得的读数中的噪声,并且一方面提取土地的强度和压实的参数,并且另一方面提取工作元件的可能堵塞。附加地,频域中的数据处理使得能够管理加速度测量值,该加速度测量值能够在同等土壤条件下提供农业用地的压实程度的可重复性。
17.在本发明的实施例之一中,根据功率谱密度(psd)信号的幅度测量值和所考虑的某个频带来确定农业用地的硬性的程度和可塑性的程度。以这种方式,某一频带中的振动被有利地表征,并且因此有可能在土壤的多个机械状态和与不同情况相关联的不同机械参数集之间建立对应关系,这最终使得农业数据库能够被完成。
18.在本发明的实施例之一中,本发明设想基于对应于计算的能量测量值的第一能量模式与对应于多个机械状态的多个能量模式的比较来确定农业用地的机械状态。
19.本发明的实施例之一设想了一种用于交换信息的通信流,其包括:将传感器部件
的测量值发送到布置在农业机械中的主通信节点;将基于测量值的信息从主节点发送到中央服务器;以及在中央服务器中存储由每个农业机械的主节点发送的基于测量值的信息。可选地,在具有非常高数量的传感器的情景中,传感器部件的测量值可以通过若干仅具有桥接功能的中间节点被引导,该中间节点被配置成接收测量值并且将测量值发送到主节点。
20.附加地,设想了由处理器模块根据在耕作元件的旋转频率中检测到的变化来确定耕作元件的状态的可能性,其中,耕作元件的状态选自:耕作元件的锁定状态或具有某种程度的磨损的状态。
21.可选地,本发明设想由控制系统的致动器根据所确定的农业用地的机械状态来修改耕作元件的物理参数,其中,物理参数选自:工作深度、耕作元件的攻角、耕作元件之间的距离、耕作元件的压力和耕作元件的旋转速度。以及要使用的农业机械和耕作元件的自由度中所设想的任何其他动作。
22.根据特定实施例,本发明包括:频率滤波级,其中,消除了频率信号的一个或多个重复频率,其对应于耕作元件的操作所固有的振动。
23.附加地,设想了通过利用与机器学习相联系的技术(诸如神经网络或其他归类算法) 将对应于功率谱密度信号的能量测量值的第一能量模式与对应于多个机械状态的多个能量模式进行比较来确定农业用地的机械状态的可能性。为此,在频率空间中进行的对所获得的读数的计算被集成到数据库中,该数据库不仅使得能够知道每一个传感器的具体数据,而且能够知道其时间演变,使得与人工智能相关联的技术能够关联和分类已经分类的先前情况的存储参数。
24.根据本发明的实施例之一,与机器学习和人工智能相联系的技术以两种方式进行工作,一方面,这使得能够为在其中找到传感器的当前时刻确定值,并且另一方面,它将这些新的读数添加到系统中,以便通过大数据系统并且利用不同的轮廓参数在新的确定中丰富系统,该大数据系统逐渐增加了耕作元件在新位置中的行为的知识,随着系统在这些土地上工作的日期的变化,系统可以找到所述不同的轮廓参数。
25.在第二方面,本发明涉及一种用于确定农业用地的机械状态的系统,该系统包括:
‑
具有至少一个耕作元件的农业机械;
‑
布置在至少一个耕作元件中的包括至少一个加速度计和陀螺仪的传感器部件,被配置成测量由于农业机械在农业用地上的耕作操作而产生的振动信号;
‑
处理器模块,与传感器部件通信,用于从所测量的振动信号确定土壤的机械状态;以及
‑
通信部件,被配置成在传感器部件与处理器模块之间交换信息;其中,系统被配置成:由传感器部件根据预先建立的频率获得振动信号的测量值;将从振动信号获得的测量值归类到数据分组中;将归类到数据分组中的振动信号的测量值变换成频率信号;从频率信号开始计算能量测量值;以及基于频率信号的能量测量值来确定农业用地的机械状态,其中,所确定的机械状态包括硬性的程度和可塑性的程度。
26.根据本发明的实施例之一,通信部件包括:主节点,布置在农业机械中,被配置成接收传感器部件的测量值;以及远程中央服务器,被配置成接收从每个农业机械的主节点发送的基于测量值的信息,并且将其存储在数据库中。
27.可选地,本发明的实施例之一设想通信部件还包括:布置在传感器部件与主节点之间的一个或多个中间节点,被配置成接收传感器部件的测量值,并且充当桥将所述测量值转发到主节点。
28.在本发明的最基本实施例之一中,传感器部件包括布置在耕作元件之一(例如盘)中的单个传感器,并且通信部件包括在智能电话中虚拟实现的主节点,其中,智能电话还包括处理器模块和控制计算机应用程序。因此,有利地,在最简单的可能情景中,降低了对系统的硬件要求。
29.本发明的实施例之一设想了一种无线通信模块,其连接到布置在每个耕作元件中的传感器部件,被配置成将传感器部件的测量值发送到下一节点,其中,下一节点被进一步配置成接收和传输无线通信。因此,有利地,除了在元件之间建立有线通信的传统选项之外,本发明可以在其元件之间建立无线通信。
30.根据本发明的实施例之一,中央服务器数据库存储对应于多个先前已知的机械状态的多个能量模式,并且处理器模块被进一步配置成将对应于所计算的能量测量值的第一能量模式与来自数据库的模式进行比较,并且提供对农业用地的机械状态的实时估计。在本发明的特定实施例中,根据存储在数据库中的数学回归模型获得对农业用地的机械状态的实时估计。
31.根据不同的实施例,本发明的系统是分布式系统,其可以在系统的不同元件之间改变处理器模块的计算负载。在实施例之一中,处理器模块包括容纳在主节点中的通用处理器。附加地,在本发明的一个实施例中,处理器模块还包括容纳在一个或多个中间节点中的本地处理器。因此,有利地,中间节点的处理能力可以用于在必要时向通用处理器卸载一定的计算负载。
32.在本发明的实施例之一中,中央服务器具有处理能力,并且被配置成主要接收、存储关于先前捕获的数据的历史层级的信息和使得能够实现对其的查阅。还有可能设想,随着其历史数据的丰富,在中央服务器中使用机器学习算法,诸如神经网络或其他算法,以便改进对农业用地的机械状态的估计的计算。算法的输出值是由处理器模块的算法设置的参考值,使得在本发明的一个实施例中,主节点可以确定土壤的机械状态,而不需要与中央服务器持续通信,否则具有准时的连接以便传输对其算法的修改才将是足够的。
33.在本发明的实施例之一中,处理器模块还包括:控制系统,其具有与耕作元件相关联的至少一个致动器,所述致动器被配置成修改耕作元件的物理参数。
34.附加地,本发明的一个实施例包括地理定位模块,其被配置成确定其中已经获得从振动信号获得的每一个测量值的位置。因此,有利地,本发明将位置信息与数据库中土地的标志进行组合,以便例如生成地块中土地的压实可变性地图,实时存储和分析结果。除了有助于对土地上的操作者的即时响应之外,它还使得能够比较先前的任务和活动,以便尽可能高效地做出对农业机械的配置决策。
35.农业机械设想包括拖拉机和以下农业机具中的至少一种:耕耘机、播种机、犁或意图用于对农业土壤进行工作的任何其他农业机具;并且其中,农业机械的耕作元件选自:盘、臂、犁铧、耙、联接器、尖端、犁壁或被配置成在农业机械的耕作操作期间接收振动的任何其他元件。
36.在本发明的一个实施例中,传感器部件根据预先建立的类型被布置在农业机械的
多个耕作元件上,其中,处理器模块被配置成联合处理获得的振动信号。因此,有利地,本发明考虑了传感器的布置、其配对和环境变量,以便提取最终参数、调查的结果。
37.本发明具有众多优点,包括:通过评估每个耕作元件的工作状态来确定农业机械的行为,以便得出结论,例如,在与传感器相关联的特定元件中是否存在堵塞,或者以便确定其磨损,通过分析同一组件在其使用寿命的开始和结束时之间的频率,利用这可以建立其更换的最佳时刻。
38.本发明收集多个读数(与土壤的机械行为相关的不同振动参数和收集数据时机具空间位置的数据),以独立和归类的方式表征数据。因此,它是一种学习的可缩放增长和表征的方法,同时它使用所学习的内容以便完善机械的工作。因此,有可能在创建自主预测系统的领域中执行自学习方法。
39.利用本发明的方法和系统,确定了土地的状态,分析了耕作元件的行为及其对农业任务的影响两者,使得有可能优化用于准备农业用地的任务的成本、处理和能量消耗。通过使所生成的振动信号的分析对应于农业耕作参数,诸如土地的硬性和/或可塑性的程度,当农业机械实行耕作或播种以种植作物时,有可能减少这些任务在与实行任务所用的力或强度相关联的材料磨损、柴油消耗以及播种所需的最终结果方面的经济影响。
40.本发明的系统有利地使用传感器的测量值,不仅测量土壤的机械状态,而且还使得能够进行读取、通信、处理、诊断、解释和动作,因此实现了用于配备有所述传感器部件的农业耕作组件与农业机械之间的相互作用的智能系统。因此,测量值被引入到智能预测过程中,该过程使得能够降低捕获数据的噪声(误差),将其与先前的数据进行对比,并且使用人工智能实时获得响应,以便使系统配备有在确定所寻求的参数中的改进,这甚至使得能够达到耕作元件的自主工作以用于准备和播种农业用地。
附图说明
41.为了完成本发明的描述,并且出于帮助使其特性更容易可理解的目的,根据其优选示例性实施例,包括了一组附图,其中,作为说明而非限制,已经表示了以下附图:
‑
图1表示本发明的传感器微粒之一。
‑
图2表示带有耦合传感器微粒的农业机械盘耙。
‑
图3示意性地表示本发明的通信和控制系统。
‑
图4表示根据本发明的实施例之一的农业机械上的传感器的布置。
‑
图5表示安装在本发明的实施例中的移动应用程序的信息流的示图。
‑
图6示出了在本发明的一个实施例中的传感器信息的通信方案。
‑
图7示出了在本发明的一个实施例中的数据库的创建方案。
具体实施方式
42.本发明公开了一种用于借助于安装在农业机械的耕作元件中的传感器的测量值来确定土壤的机械状态的方法和系统。
43.本发明的方法和系统评估由传感器获得的测量值,以便预测土壤的某些机械参数,这根据对农业机械的操作及其与土地的相互作用所生成的振动信号的分析,其有利地被农民用来做出与农业规划、他们的机械的操作或工作过程的自动化相关的决策。
44.农业播种机、耕耘机、犁或其他农业机具可以具有10个、20个、30个或甚至100个耕作元件,并且其在农业机具中的布置是成行进行的,农业机具能够具有2行、3行、4行以及甚至8行若干类型的元件,这使得能够在工作场地上农业机械的单次通过中实行若干个土地准备任务。这样做,在该单次通过中了解农业机具在土地情况下表现如何对于其性能是最佳的,并且正是本发明的目标之一,其中,工具的行为在准备和播种农业用地的任务期间被捕获,测量由于土地的不同机械行为而在设备中产生的振动。
45.最常用于整地和播种的农业机械包括:拖拉机和一种或多种农业机具,诸如播种机、松弛机、耕耘机或犁。在这些农业机具上,布置了一系列耕作元件,这些元件对于要执行的每一项任务都是特定的。例如,播种机的主要耕作元件是犁铧和播种盘,它们被配置成在土地上开沟。在松弛机中,与土地接触的耕作元件是臂,其被配置成实行疏松工作并且使得土壤膨胀,同时它们保持表面完整,并且改善土壤的水循环和氧化,有利于根系生长和植物发育,从而在收获时获得更高的产量。耕耘机具有多种功能,诸如清除杂草、粉碎土块、疏松土壤表层、在苗床中形成细土、或为灌溉而整地以及向土壤中并入肥料,并且这样做,根据要实行的任务,它们具有若干个耕作元件,诸如具有不同型号和大小的犁铧和耕耘机臂。耙和犁也具有带有不同凹度和大小的盘,以便实行耕作。其他耕作元件是犁壁、农业犁铧、尖端、踵、刀片或导向器。所有先前的元件都具有非常具体的特征,这使得它们适用于某些任务或其他任务。例如,挑选凹度、大小、硬度或韧性的程度将取决于待加工土壤的机械条件,出于此原因,获得该信息是必要的,以便始终选择最佳配置。
46.在本发明的示例性实施例中,系统包括多个传感器1,考虑到其简单性和较小的大小,传感器1可以被称为“传感器微粒”或“电子微粒”,其在图1中被表示。基本传感器微粒具有振动传感器,以便通过振动信号捕获与所述传感器微粒接触的元件的行为,该振动信号在振动元件的操作期间通过所述元件传播。因此,本发明的系统主要基于传感器微粒中的加速度计传感器的配置,尽管在一些实施例中,它们具有来自其他外部传感器的信息,该信息对于加速度计本身的信息是附加或可选的,系统能够解释和使用该信息。
47.电子微粒被设计成安装在任何先前提到的用于整地和/或播种的工作工具中,其通过在操作期间与土地接触来捕获在所述工作工具中接收到的振动,并且将对应的测量值传输到处理器模块。它们可以安装在农业机具的耕作元件(诸如图2中表示的耙盘2)之一的外表面上,以便分析其行为或用于评估农业机具的一组元件或主体。
48.作为示例,下表示出了在两个不同的记录或区域中实行的、由电子微粒之一(在这种情况下为“传感器4”)收集的数据,所述记录或区域在这里对于特定的通过被称为“3”和“7”,所述通过在这种情况下被称为“11b”。该表包括最大psd(mpsd)的测量值、最大psd出现的频率(fmpsd)以及存储在可变能量中的在所述记录中累积的能量。通过传感器记录mpsdfmpsd能量p11b4373.744022.41216.849p11b47319.783245579.943
49.图3示意性地示出了本发明的控制系统,其中,设想了包括用于分发控制信息的若干个节点的通信网络。传感器微粒与主节点之间的通信可以通过布线来实行,或者,例如,在大量传感器微粒的情况下,根据图3的示图,借助于无线连接来实行。其中,传感器微粒1具有无线通信模块30,以便将从检测到的振动信号获得的多个测量值发送到主节点31,该
主节点31优选地布置在农业机械的拖拉机中,尽管在其他基本实施例中,主节点实际上集成到诸如电子平板设备或移动电话之类的便携式电子设备中。附加地,可以包括中间节点32,以充当桥,并且将信息转发给主节点。该主节点充当信息的主人,将传感器记录归类在单个数据库中,并且由于该控制系统,使得它们对于用户和系统来说可用于其分析以及与其环境的相互作用。来自主节点的所有信息被发送到远程中央服务器35,其中,它被存储在通用数据库中,在适当的安全和隐私限制下,该数据库可从不同机械的主节点访问。
50.可选地,中间节点可以具有与主节点相同的计算功能,从而在面对非常大量的传感器微粒时防止最终的通信问题,这些传感器微粒在无线模式下可能会使中间节点的接收极限饱和。以这种方式,无论电子微粒的数量是多少,将中间节点增加一倍就保证服务。另外,尽管中间节点的主要功能是充当桥,但它们也可以被配置成处理部分信息,并且因此减少主节点中的计算任务,当主节点从非常大量的传感器接收信息时,其可能需要一定的处理时间,这将导致瓶颈。
51.根据所选择的实施例,第三方系统33可以通过提供在农业机械中、优选地提供在拖拉机中的单个总线34(遵循串行或can总线通信协议)连接到本发明,以及特定的致动器以便遵循控制系统所发送的指令而动态地配置耕作元件的某些物理参数。以这种方式,本发明的配置和控制可以适应系统的任何类型的最终信息需求,也适应节点和传感器的总数。
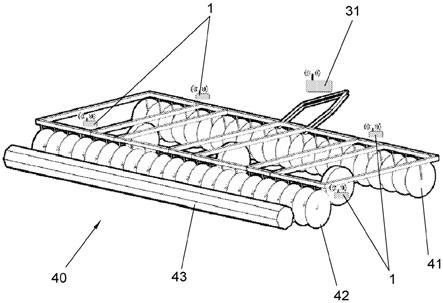
52.农业机械40上的传感器的布置是可变的,并且取决于操作者在每种特定情况下所需的数量和分布,或者取决于耕作元件和农业机械的总体的控制可能性,该农业机械40诸如是图4的示例中所表示的农业机械,其中,详细示出了钩住拖拉机(未表示)的农业机具。例如,行布置使得从农业机械的主体获得信息成为可能,而组配置使得能够获得机械内的变化性参数。
53.具体地,图4的农业机械与布置在农业机具中的三行农业元件一起工作。前两行41和42(最靠近拖拉机的行)是盘耙,并且最后一行包括压实辊43。另外,四个传感器1已经分布在农业机具的整个结构中。因此,在该具体示例中,农业机械在土壤中以单次通过来实现两个不同的任务。考虑到耕作元件具有若干个可配置的参数,诸如工作深度、旋转速度或攻角,获得关于土壤的机械状态的信息,本发明使得能够为每一行建立这些耕作元件的最佳配置。这种配置可以由用户实时建立,或者它可以根据前几年相同土地或利用相同或非常相似的农业机械工作的相似田地的数据库中存储的信息自动建立。
54.例如,对于已经被确定为坚硬的土地,农业机具的第一行41可以被自动分配低深度参数和小攻角,以便实行适度的盘耙地任务。对于另一行,诸如行42,尽管它具有与行41相同的功能,但行中传感器的比较使得它能够知道在由行41实行的工作之后土地是如何的,并且因此做出不同的配置决策,诸如更小的攻角和与第一行的工作深度不同的工作深度,由于知道了根据农民的需求所获得的结果,降低了工作强度。在这种情况下,通过降低农业机具的组件的磨损和所需功率两个方面的工作强度,将降低操作成本。同样地,对应于压实辊的最后一行43将具有相关联的工作压实/沉降,这将取决于由先前传感器测量的工作结果、土壤的状态以及已经存储在数据库中的具有满意结果的类似任务。因此,有可能优化每一行的工作,并且因此优化农业机械的工作,从而保证类似条件下任务的可重复性。
55.系统对于配置不同传感器的数量、方位或类型以及从传感器接收信息的节点数量
是开放的。以这种方式,有可能通过移动应用程序配置其数量,或者如果设备连接到农业机械的拖拉机的can总线/isobus,则借助于所述拖拉机的用户界面进行配置。图5表示包括在本发明的实施例之一中的移动应用程序中或者拖拉机的can总线/isobus系统中的信息的流程图,其中,一旦过程50已经开始,过程50就前进到系统的配置51——用户介绍农业机械的农业机具的传感器的数量、方位、形状和类型;那么接收测量值的操作52开始,并且由地理定位模块获得读取方位的确定53。所有这些信息在应用程序中被接收54,或者在没有应用程序的情况下,在农业机械的拖拉机的can总线/isobus系统的用户界面中接收。在一方面,该应用程序打开移动设备的通信55,其中,已经安装了通信,以便将信息转发到中央服务器,并且在另一方面,接收到的信息然后被记录56,其中,它被分配了名称57,这使得它能够稍后被检索。记录数据和分配名称的步骤被连续执行,直到系统关闭,这使得到该点为止记录的所有数据被发送58到数据库,并且操作结束59。
56.图6示出了在本发明的一个实施例中的传感器的信息的通信方案,其中,传感器的数量和分布将取决于要获取的信息,如图4的先前示例中所描述的。信息流从由电子微粒1和地理定位模块63所收集的数据开始,通过由系统的每个农业机械的拖拉机的主节点31包括的现场计算机,并且在系统的中央服务器35或第三方机械64中结束。还存在信息流的反向路径,使得在中央服务器或第三方机械中实行的信息分析被往回发送到主节点,其中,控制指令66可以被发送到电子微粒。
57.更深入地详细描述图6的通信方案,在这种情况下,电子微粒1具有加速计传感器60、存储器61、无线通信模块30和其他传感器62。由传感器获得的信息被准备在数据分组中,该数据分组被直接或通过中间节点32发送到主节点31的现场计算机的控制器,该中间节点32从任何电子微粒接收分组,处理分组,分析其相互关系,尤其是配对的分组,并且生成动作或记录参数。
58.地理定位模块63具有用于lte/4g/3g/2g网络的通信模块,其将卫星位置信息(gnss)发送到主节点的现场计算机的控制器,其中,实行每一个测量值与接收到的位置信息的同步和配对。
59.主节点中接收到的所有信息有助于创建数据库,该数据库对于系统可用,以用于其在先前已配置的任何电子设备上的存储和呈现。除了能够被直接发送到中央服务器35或发送到来自其他制造商64的机械之外,它还能够从那里被发送到移动设备65,这由用户来挑选,数据通过互联网连接被上传到中央服务器。
60.对于与来自其他制造商的机械或本发明的系统外部的任何元件的通信,控制器被提供有isobus通信,其可以连接到农业通信,并且通过iso11783标准将其信息与其他制造商和控制器集成。
61.图7示出了本发明的实施例之一的数据库70的创建方案,其中,由分布在农业机械中的电子微粒1获得的信息与由地理定位模块63获得的方位信息进行组合。基本上,该过程包括将来自传感器的数据与方位信息同步。这样做,根据应用,采样频率以及记录和传输时间被考虑在内,出于此原因,分组记录时间和传感器的捕获频率的参数的初始建立的配置将定义所获得的样本及其精度。同步数据被归类到不同的分组(711,712,...713),它们以有序的方式存储在数据库70中,其中,每一个分组进而包括若干个gps测量值(714,715)和来自传感器的若干个测量值分组(716,717,
…ꢀ
718)。
62.本发明提供了若干层的作用,其可以集中成如下三个分层层级:在第一层级上,本发明的基本操作具有传感器,随着农业机具通过,该传感器获取土地表面上的耕作和播种工具的行为的读数。这样做,在本发明的实施例之一中,传感器具有加速度计和陀螺仪,该加速度计和陀螺仪记录机械与土壤相互作用所生成的振动,该振动由于土地的硬度、湿度或所提到的其他机械参数而影响所有组件。如上所述,对记录的振动的处理使得能够确定土壤的机械状态,其与从所述处理得出的某些机械参数相关联,该参数诸如是硬度或可塑性。
63.在第二层级上,本发明的一个实施例,其比先前一个实施例更完整,具有分布在农业机械的若干个点处(优选地,在农业机具和耕作元件的结构中,尽管一些传感器也可以安装在拖拉机中)的多个传感器,这些传感器在工作期间获得与不同耕作元件或元件组相关联的测量值。根据传感器分布的示例,如图4的示例中表示的,由耦合到农业机具的传感器1获得的测量值被发送到主节点31,其中,本地处理器根据传感器的空间分布分析接收到的测量值,以建立机械不同点的差别参数。
64.各传感器单独工作,记录农业机械每次通过中的个体测量值,其用作土壤机械状态的表面分析,但是知道所有传感器的位置使得能够对它们进行联合评估,并且使得能够确定农业机械的不同行为,从而将执行工作的方式分成多组致动器、或甚至分成在整个机械的主体。
65.实施例之一设想了传感器的纵向归类,这使得其能够知道第一传感器如何给出关于耙的盘或元件动作之前的土地如何的信息,以及布置在第一传感器之后的第二传感器,其使得能够知道耙动作之后土地的变化。
66.实施例之一设想了传感器的横向归类,这使得能够修改机械的不同主体的工作强度,将任务调整到例如由更宽的农业机具发现的不同区域。
67.它可以以类似的方式与当前结合在农业机械中的任何元件一起进行,例如,借助于布置在第二行中的传感器来控制位于农业机械的第一行中的耙盘的工作是令人感兴趣的,并且这进而从第三行被控制。有了这些类型的动作,就有可能控制机械的不同组件或区域和主体的工作,这是与机器人机械同时工作时的一个重要的事实,所述机器人机械可以根据它们通过地块时遇到的土壤类型进行动作和反应。因此,有利的是,若干个组件有可能同时工作,并且单独作用于它们中的每一个,可以优化整地的任务,并且甚至可以减少单次通过所需的时间和能量消耗,这进一步减少了机械在每次通过中所实行的土地压实。
68.在第三层级上,对应于比先前实施例更完整的实施例,除了先前解释的实施例的元件之外,本发明还与其他元件相互作用,诸如市场上的特定传感器,这丰富了所使用的算法并且提高了系统的效率。在这种情况下,基本系统被设有若干个数字通信输入端口,以便包括来自传感器的针对湿度、碎屑量、有机物等的附加信号。
69.来自传感器的所有信息有助于确定由系统的处理器模块实时接收到的土地状态的机械参数,以及耕作元件的行为。
70.系统的处理器模块可以在中间节点中、在主节点中实现,或者分布在它们之间。任何处理功能同样可以在中间节点中、主节点中或中央服务器中所容纳的处理器中实行。
71.附加地,电子微粒包括地理定位模块,例如gps,该模块为传感器所获得的每一个测量值生成方位信息,这使得能够对土地的演变进行时间对比,并且由于该系统的可追溯
性,将导致未来自动做出决策。替换地,gps定位模块可以集成到农业机械中,并且其是将每一个传感器所获得的测量值与地理定位模块所获得的方位信息相关联的处理器模块。
72.本发明设想了若干种递送数据的可能性。因此,它可以被配置成将读取信息发送到用户的通信设备,诸如移动电话或电子平板设备,其中,已经安装了特定的应用程序来这样做,或者仅当它与其他设备相互作用时才以电子方式发送,以便基于从具有相似条件(诸如相同的农业机械或相似的土壤机械状态)的先前情况中得出的信息来提供自动配置。
73.在与其他设备的相互作用中,根据实施例之一,本发明的系统可以添加电子板,以用于与其他系统互连,或甚至具有其自己的电子盒来发送信息。以这种方式,平台、电子板或盒两者都使得能够将信息以开放的格式(诸如isobus或xml)传递给第三方制造商,这些第三方制造商先前已经同意其使用,或者将它以封闭的格式集成,使得其他接收者可以将它们集成到他们的机械中。一旦由处理器模块的算法确定的土地的机械参数已经被传输,所有的信息就都被存储在中央服务器的数据库中,根据不同的实施例,该中央服务器将是专用的物理服务器,或者它将被虚拟地实现在云中,其中它将是可用的以便实行系统组件和其他土地的后续分析。
74.结合本发明的系统所包括的上面详细描述的硬件元件,优化耕作、农业机具的使用和播种的目标需要处理器模块中的某些算法,以便管理收集信息、处理、通信和执行的任务。这些算法在两个层级上进行工作。在第一层级上,实行相对或局部处理,其中,该算法专门根据在土地中发现的内容进行工作,分析其中农业机械正在工作的特定地块及其土壤中给出的差别响应,因此借助于对由电子微粒的传感器(优选地为加速度计和陀螺仪)所获得的确定的大量分析来确定土壤的机械可变性。结果是土壤机械状态的相对确定,其中硬度和可塑性的程度仅指代当前正在工作的土地。除了硬性的程度(对应于高振动)和可塑性的程度(对应于低振动)之外,对该数据的解释还使得能够确定盘故障(对应于当有传感器的供应信息时缺少数据)、磨损(对应于元件旋转频率的变化)和使用寿命(对应于旋转极限或操作小时的预先建立的值)。
75.在第二层级的工作上,处理器模块的算法包括在整地中实行的任务的预测、规划和可追溯性处理。由于数据的捕获、管理和传输到不同地块的云环境(其数据收集过程是可重复和可比较的,主要是农业机械的速度和确定对土地的外部激励的结构),确定从相对走向绝对,实现了不同方位/地块的存储和比较,其中它们之间具有很大的空间差异,并且将其发送到中央服务器。该中央服务器通常设想比土地上的农业机械上的中间/主节点所并入的处理器更大的进行数据处理的处理能力。
76.一旦处理器模块处理了特定地块的所有信息,将所获得的测量值与从具有可比较的特性的其他土地上存储的测量值进行比较,它就将绝对计算值往回发送到农业机械的主节点,以便继续对与其连接的不同设备和正在工作的土地进行参数化。同时,处理器模块生成设备和任务的行为地图,其可以与土壤的机械行为地图相关。
77.由处理器模块执行的计算和预测是基于为先前情况(或至少一个初始训练时段)获得并且存储在数据库中的所有信息。在获得机械参数之后,这些参数被用作基于人工智能的分析技术(诸如基于传感器所测量的值从物理参数提取预测的神经网络,或者分析每个变量的影响及其与系统的物理关系的回归函数)中的输入,其目的是实时预测其中农业机具正在工作的土壤的机械行为(算法的输出)。
78.为了建立不同类型的土地及其相关联的传感器数据,先前利用市场上可获得的传感器测量抗穿透性、湿度和可塑性,并且通过数据收集活动研究频率值和能量,以供未来处理。因此,获得初始相对和绝对数据,利用这些数据来训练系统。
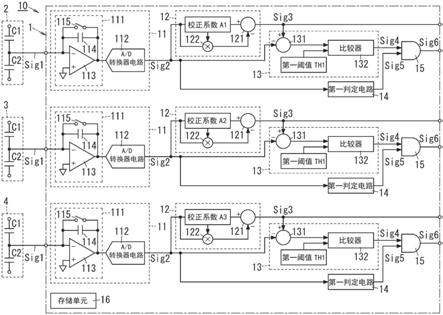
79.输出预测是实时进行的,这是通过直接向处理器模块提供集成在农业机械的耕作元件中的振动传感器的瞬时读数(在获得它们时)来实现的。这些读数由传感器在时域中获得,但是它们借助于在频域中计算的振动参数来被表征和滤波,其中,对于这种类型的信号,诊断在信息方面是非常丰富的。频率信息是机械行为的第一参数化,其中,不同的波长被转换成不同频率的能量激励。换言之,向频率空间的变换使得振动信号能够被划分成不同的波长,从中获得每一个波长的能量测量值,并且在这种情况下,独立地分析它们,以便能够诊断什么物理事实正在产生振动。
80.最后,处理器模块将这些实时接收到的读数与输出值相关联,这是由于先前根据从讨论中的土壤手动获得的值所确定的关系/训练,并且与系统的数据库中所收集的历史数据进行对比。
81.传感器捕获信息的频率和时间显著影响所捕获的信息的精度和分辨率。另外,读取频率、包装时间和传输时间根据农业机具中所使用的元件和所寻求的参数是可变的,使得例如研究振动需要大量的用于信号频率研究的读数,而旋转故障或使用寿命并不需要它。在本发明的一个实施例中,用于建立记录分组的读取时间在50与500 hz之间的频率范围内实行,换言之,在0.25和20秒之间从传感器获取数据。一方面,这确保了良好的频域精度,在最坏的情况下,数据间隔的频率在δf = 1 hz左右,并且土地中数据集(分组)的空间数据的精度在地块中在0.2与20米之间计算。根据预期的工作类型、机械和耕作元件,分组的大小在250与2000个数据点之间变化。
82.该算法对在处理器模块中从安装在农业机械中的尽可能多的传感器接收到的所述数据分组进行归类。所述分组包含有来自加速度计和陀螺仪的数据,这些数据是以联合和三维方式连接和捕获的特性,这使得能够获得由传感器控制的每个方位在x、y、z轴上经历的空间位移。因此,从每个加速度计传感器接收以下值:时间、accx、accy、accz、girx、giry和girz,因此知道变化速度和空间方向。
83.根据通过先前的值所测量的振动,计算机械参数,诸如可塑性、硬度、组件的旋转故障、组件的使用寿命或磨损,这些参数将每一个耕作元件和农业机具的行为作为整体与土地的机械阻力相关。
84.所获得的数据分组从时域传递到频域,以用于其作为振动的处理,确定频率参数,该频率参数对于测量土壤
‑
结构相互作用的行为以及因此测量利用农业机械的通过正在激励的土地的行为是理想的。
85.为了将信号从时域传递到频域,处理器模块的算法使用傅立叶变换函数,然后计算从能量密度或功率谱密度(psd)信号开始获得的能量测量值(诸如最大累积能量或不同频率下的不同能量峰值),并且借助于所计算的频率和能量在50与500 hz之间的限制内获得振动的分类。考虑到最初几次通过的最小值和最大值,可以相对地获得能量测量值,其在先前的日期记录在同一区域中和记录在数据库中的数据中,或者甚至通过将它们与通过其他方法(诸如透度计和压实机)测量的数据进行比较来完全建立它们。
86.一旦在时域中获得的测量值被传递到频域,处理器模块的算法就应用滤波步骤,
以便消除旋转、磨损或周期性摩擦固有的频率,使得仅保留由土壤
‑
结构相互作用产生的振动固有的频率,这使得能够表征每个地块的土壤的可变性。滤波器主要基于标识频率的重复性,提取频率,并且因此降低读数的噪声。例如,在实施例之一中,消除了非常低的频率(利用高通滤波器)以便避免基线效应,并且消除了从200 hz开始的高频以便避免错误的测量值(利用低通滤波器)。在特定的实施例中,对0 hz
‑
1 hz范围的来自加速度计的信号使用五阶巴特沃斯滤波器。
87.信息的归类处理使得能够在每个耕作元件在土地上的动作之后检测振动信号的变化,这实时反映了每个元件的行为,因为安装在农业机械上的本地处理器接收、处理和示出所有接收到的信息,并且以瞬时方式实行计算。来自陀螺仪的数据所反映的振动信号中的这些变化使得能够分析旋转移动中的差异,并且因此,耕作元件中的堵塞其意味着农业机具的不良动作,以及需要观察和甚至暂时停止工作,以便在机械中实行修理或重新调整。
88.本发明的频域中的信号分析不仅用于确定土壤的机械状态,而且它还可用于确定安装在农业机具或结构的某些部分中的耕作元件的使用寿命,因为其周期性振动,换言之,与土地无关的振动,由于元件的磨损和结构变化而改变,诸如盘直径或尖端长度的减小。因此,所获得的参数,诸如时间加速度的最大值、最大累积能量或特定频率的功率谱密度psd信号中的不同能量峰值,使得能够利用经训练的神经网络,根据土地为该时刻表征磨损数据与所使用的一个或多个工具的行为之间的每组读数。
89.因此,根据所有先前的处理,本发明的用户(农民)实时接收关于土壤机械状态的信息,包括土壤的可塑性和硬度、耕作元件的故障、其使用寿命及磨损。附加地,可以通过结合外部传感器所获得的水分来改进计算。例如,在实施例之一中,用户通过连接到主节点的屏幕接收关于该地块的哪些点(根据gps位置)硬度较高或较低以及可塑性参数的信息,以便估计其农业机具所做的工作是否或多或少强烈,并且因此评估耕作元件的配置的变化,这防止设备由于土地引起的磨耗或磨损而被损坏(增加使用寿命)。附加地,对于连接到具有自动改变农业机具的配置的能力的农业机械的设备,用户电子接收相同参数用于评估机械自由度,诸如工作深度、操作模式、速度、强度、轴之间的距离或盘的倾角。
90.除了信息和相关动作之外,本发明还通过农业机械上的lte/4g/3g/2g连接将获得的所有信息缩放到云中,其目的是连接到其他设备的机械能够做出反应,因此使得能够实现实时知道和动作,以绝对的方式确定土地的状态。在绝对模式下,将相对数据与相同地块的存储数据进行对比,以便获得所述地块的绝对关系。同样地,可以将该数据与其他地块进行比较,从而获得总体绝对变化,这使得在不同地块、区域和国家中发现的可变性能够进行对比,信息处理达到参数反馈,这归因于发现的可变性的丰富性。另外,它使得能够以相对的方式了解整个运动期间或来自地块的其他年份的处理中的时间变化,从而了解前几年所做的决策如何变化以及如何影响特定土地的当前状态。这意味着农民和系统可以确定先前的动作是否具有期望的效果或是否需要修改。
91.其中集成了所提出的传感器的农业机械可以包括耙、耕耘机、播种机和多种农业设备和农业机具,它们通常被钩到拖拉机上,其目的是打开土地、移除和固化土壤、压实土壤等。在这种情景中,本发明有利地导致降低通过及其执行精度,实现了以准备用于播种的土壤为任务进入工作的每一个元件的使用的改进,并且由此提高了工作的性能和结果。
92.借助于传感器的读数直接或间接获得的机械参数使得农民能够实时改变农业任
务或工作的应用参数,或者在实行任务时记录土壤的状态及其状况,以用于其工作的后续可追溯性。
93.本发明具有许多优点,在它们当中,通过实时接收包括与硬度或表观密度相关的测量值的关于土壤机械状态的信息,它使得农民能够在农业机具中在飞行中反应,而无需等待信息的处理。另外,还获得了关于所用耕作元件的行为的信息,能够评估其工作状态,并且确定最终的堵塞,以及其磨损或使用寿命,以便确定更换的最佳时间。
94.附加地,在本发明的一个实施例中,呈现给用户以帮助他们做出决策的所有这些信息被用于直接对正在执行的任务相互作用,因此进入与机械的引导的机器人相互作用。因此,所获得的信息被传输到机械,使得机械的其他元件可以自动致动其组件,并且根据这些传感器对土地状态做出的确定来修改操作方式。此特征对于如今自动引导拖拉机的自动机械的新时期至关重要,但是在短时间间隔内,它们将能够所有农业任务的操作自动化。
95.本发明不应该受到本文中所描述的实施例的限制。基于本描述,本领域技术人员可以执行其他布置。因此,本发明的范围由所附权利要求限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。