1.本发明涉及上肢力量训练设备技术领域,具体为一种中风偏瘫患者用上肢力量训练装置。
背景技术:
2.中风,是一个中医学名词,偏瘫是中风的最常见的表现之一,能够引起中风的常见原因也就是引起中风偏瘫的常见原因。中风偏瘫是最常见的中风后遗症。它是指一侧肢体肌力减退、活动不利或完全不能活动。偏瘫病人常伴有同侧肢体的感觉障碍如冷热不知、疼痛不觉等。有时还可伴有同侧的视野缺损,表现为平视前方时看不到瘫痪侧的物品或来人,一定要将头转向瘫痪侧才能看到,科学的运动功能训练:包括肢体的被动运动、主动运动和抗阻运动,以及“作为康复治疗法”等。这套现代康复医学运动功能训练方法,应当在康复技师的指导下,根据不同病情采用不同方法进行。这项康复医学中发展起来的新技术,目前即使在最大的医院里,能够掌握和运用的医生还为数甚少,中风偏瘫的患者,尤其是长期卧床的患者,肢体不能运动,为了促进他早日康复,我们要尽早的给他进行运动。运动分为有被动运动和主动运动。所谓被动运动就是由别人来运动他,比如医生、护士或者家属来运动他。主要是运动他的关节,一般从大关节开始,逐渐过渡到小关节,从上肢到下肢。比如先活动上肢大关节肩关节,再到肘关节,再到腕关节,再到掌指关节的活动。注意这些活动一般要在他的生理弧度范围的50%就可以了,不能超出他的生理弧度范围之内。现在我是活动肩关节,活动肘关节,活动腕关节,活动掌指关节,每个动作做5
‑
7次,每天做2次左右。活动髋关节,可以顺时针,再就是逆时针,方向相反。这样是活动膝关节,再下面可以活动踝关节。在关节不能动的情况下,我们做被动运动。一旦患者能够做主动运动,尽量让他早期做主动运动。因为能做到主动运动,病人就有自信了,觉得自己能够动了,有利于以后的康复。
3.而现有的中风偏瘫患者用上肢力量训练装置在使用时灵活性不佳,同时无法在使用时根据患者的自身需求对上肢训练的力度进行调节,从而导致对中风偏瘫患者的训练效果不佳。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种中风偏瘫患者用上肢力量训练装置,解决了现有的中风偏瘫患者用上肢力量训练装置在使用时灵活性不佳,同时无法在使用时根据患者的自身需求对上肢训练的力度进行调节,从而导致对中风偏瘫患者的训练效果不佳的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种中风偏瘫患者用上肢力量训练装置,包括机架、自锁式万向轮和支撑板,所述机架底部设有自锁式万向轮,所述机架顶部焊接有支撑板,所述支撑板表面安装有升降调节机构,所述升降调节机构一侧安
装有训练机构;
8.所述训练机构由转轴和摆动杆组成,所述转轴一端转动安装有摆动杆,所述摆动杆底部表面焊接有吊环,所述吊环共设置有多组,所述吊环用于上肢训练力度的调节,所述转轴一端套装有扭簧,所述扭簧用于摆动杆的自动复位。
9.进一步地,所述升降调节机构由导向柱、顶板、升降板和导向槽组成,所述导向柱底部焊接在支撑板表面,所述导向柱表面活动安装有升降板,所述升降板表面开设有导向槽,所述导向槽与导向柱相互插接,所述导向柱与导向槽相互配合用于升降板的导向作用。
10.进一步地,所述升降板表面中间转动安装有丝轴,所述丝轴顶部贯穿顶板,所述丝轴表面螺纹连接有手轮,所述手轮位于顶板表面,所述手轮与丝轴用于升降板的升降控制。
11.进一步地,所述升降板表面两端均开设有滑槽,所述滑槽内腔滑动安装有滑杆,所述滑杆一端均与安装架固定相连,所述转轴焊接在安装架一侧表面的中部,所述滑杆和滑槽相互配合用于安装架的伸缩距离调节,所述滑杆上表面一端均螺纹连接有锁紧器,所述锁紧器用于滑杆的固定,所述滑杆一侧均一体成型有限位座,所述滑槽内壁一侧均开设有限位槽,所述限位槽与限位座相互配合用于滑杆的限位。
12.进一步地,所述吊环底部活动连接有吊钩,所述吊钩底部固定连接有绳索,所述绳索底部固定连接有圆球,所述圆球一侧设有护套,所述护套用于对患者手部的固定,所述圆球用于患者的握持。
13.进一步地,所述摆动杆一端开设有弧形限位器,所述弧形限位器位于转轴一侧,所述弧形限位器内腔设有限位杆,所述限位杆一端与安装架表面焊接相连,所述限位杆与弧形限位器相互配合用于摆动杆的限位作用。
14.进一步地,所述安装架上表面一端安装有驱动机构,所述驱动机构由电机座、伺服电机和转盘组成,所述电机座焊接在安装架上表面一端,所述电机座顶部一侧安装有伺服电机,所述伺服电机的动力输出端连接有转盘,使所述转盘位于安装架另一侧,所述伺服电机用于转盘的驱动。
15.进一步地,所述转盘一侧表面转动连接有连杆,所述连杆用于动力的传递。
16.进一步地,所述摆动杆上表面一端焊接有固定座,所述连杆插接在固定座内腔,所述固定座一侧活动插接有连接销轴。
17.三有益效果
18.本发明具有以下有益效果:
19.1、该中风偏瘫患者用上肢力量训练装置,通过训练机构中的两组绳索带动摆动杆围绕转轴进行往复式上下摆动,从而可实现对中风偏瘫患者上肢力量的训练,其中转轴一端套装有扭簧,通过扭簧对摆动杆施加扭力,可使摆动杆在没有外力推动时可始终保持平衡状态,吊环共设置有多组,使用者可根据使用需求选择合适的吊环对吊钩进行悬挂,选择距离转轴越远的吊环时可获得更大的力臂,使用者拉动圆球所需要的力量越小,选择距离转轴越近的吊环时可获得较小的力臂,使用者拉动圆球所需要的力量越大,从而在使用过程中根据使用需求对上肢训练的力量进行调节使用更加的便捷。
20.2、该中风偏瘫患者用上肢力量训练装置,通过旋转手轮,手轮与丝轴相互配合可带动升降板沿着导向柱进行升降,从而可对训练机构的高度进行调节,当患者为卧床患者时,可将上肢训练装置移动到护理床一端,通过推动滑杆,滑杆沿着滑槽进行移动,从而通
过安装架将训练机构推出,通过限位座和限位槽相互配合可对滑杆滑出的距离进行限位,滑杆的位置调节完成后通过旋转锁紧器可对滑杆进行锁定,通过调节训练机构的高度和位置,可在使用时使患者根据自身需求选择站姿、坐姿和躺姿的方式进行上肢训练,使用更加的灵活。
21.3、该中风偏瘫患者用上肢力量训练装置,通过驱动机构,可通过控制伺服电机进行转动,伺服电机可带动转盘进行旋转,转盘在转动的过程中可通过连杆驱动摆动杆进行摆动,从而实现自动带动患者的手臂进行上下摆动,到达对瘫痪患者的上肢力量训练。
22.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
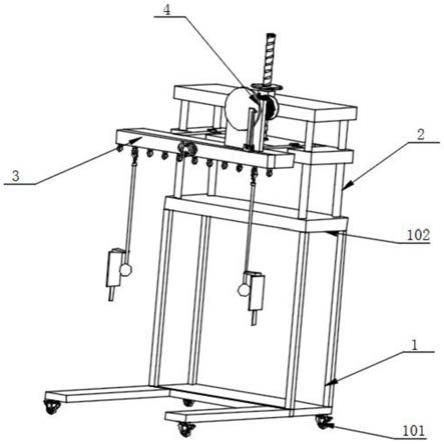
23.图1为本发明的整体结构示意图;
24.图2为本发明的后视结构示意图;
25.图3为本发明的升降机构结构示意图;
26.图4为本发明的升降板结构示意图;
27.图5为本发明的限位槽结构示意图;
28.图6为本发明的滑杆结构示意图;
29.图7为本发明的训练机构结构示意图;
30.图8为本发明的驱动机构结构示意图。
31.图中,1、机架;101、自锁式万向轮;102、支撑板;2、升降调节机构;201、导向柱;202、顶板;203、升降板;204、导向槽;205、丝轴;206、手轮;207、滑槽;208、滑杆;209、锁紧器;210、安装架;211、限位槽;212、限位座;3、训练机构;301、转轴;302、摆动杆;303、扭簧;304、吊环;305、吊钩;306、绳索;307、圆球;308、护套;309、弧形限位器;310、限位杆;4、驱动机构;401、电机座;402、伺服电机;403、转盘;404、连杆;405、固定座;406、连接销轴。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
34.请参阅图1
‑
图8,本发明实施例提供一种技术方案:一种中风偏瘫患者用上肢力量训练装置,包括机架1、自锁式万向轮101和支撑板102,所述机架1底部设有自锁式万向轮101,所述机架1顶部焊接有支撑板102,所述支撑板102表面安装有升降调节机构2,所述升降调节机构2一侧安装有训练机构3;
35.所述训练机构3由转轴301和摆动杆302组成,所述转轴301一端转动安装有摆动杆302,所述摆动杆302底部表面焊接有吊环304,所述吊环304共设置有多组,所述吊环304用
于上肢训练力度的调节,所述转轴301一端套装有扭簧303,所述扭簧303用于摆动杆302的自动复位。
36.本实施方案中,通过两组绳索306带动摆动杆302围绕转轴301进行往复式上下摆动,从而可实现对中风偏瘫患者上肢力量的训练,其中转轴301一端套装有扭簧303,通过扭簧303对摆动杆302施加扭力,可使摆动杆302在没有外力推动时可始终保持平衡状态,吊环304共设置有多组,使用者可根据使用需求选择合适的吊环304对吊钩305进行悬挂,选择距离转轴301越远的吊环304时可获得更大的力臂,使用者拉动圆球307所需要的力量越小,选择距离转轴301越近的吊环304时可获得较小的力臂,使用者拉动圆球307所需要的力量越大,从而在使用过程中根据使用需求对上肢训练的力量进行调节。
37.具体地,所述升降调节机构2由导向柱201、顶板202、升降板203和导向槽204组成,所述导向柱201底部焊接在支撑板102表面,所述导向柱201表面活动安装有升降板203,所述升降板203表面开设有导向槽204,所述导向槽204与导向柱201相互插接,所述导向柱201与导向槽204相互配合用于升降板203的导向作用。
38.本实施方案中,导向柱201与导向槽204相互配合用于升降板203的导向作用,通过控制升降板203进行升降,从而可对训练机构3的高度进行调节,这样可适应患者采用站姿和坐姿进行上肢训练使用更加的便捷
39.具体地,所述升降板203表面中间转动安装有丝轴205,所述丝轴205顶部贯穿顶板202,所述丝轴205表面螺纹连接有手轮206,所述手轮206位于顶板202表面,所述手轮206与丝轴205用于升降板203的升降控制。
40.本实施方案中,通过旋转手轮206,手轮206与丝轴205相互配合可带动升降板203沿着导向柱201进行升降,从而可对训练机构3的高度进行调节,这样可适应患者采用站姿和坐姿进行上肢训练使用更加的便捷。
41.具体地,所述升降板203表面两端均开设有滑槽207,所述滑槽207内腔滑动安装有滑杆208,所述滑杆208一端均与安装架210固定相连,所述转轴301焊接在安装架210一侧表面的中部,所述滑杆208和滑槽207相互配合用于安装架210的伸缩距离调节,所述滑杆208上表面一端均螺纹连接有锁紧器209,所述锁紧器209用于滑杆208的固定,所述滑杆208一侧均一体成型有限位座212,所述滑槽207内壁一侧均开设有限位槽211,所述限位槽211与限位座212相互配合用于滑杆208的限位。
42.本实施方案中,当患者为卧床患者时,可将上肢训练装置移动到护理床一端,通过推动滑杆208,滑杆208沿着滑槽207进行移动,从而通过安装架210将训练机构3推出,通过限位座212和限位槽211相互配合可对滑杆208滑出的距离进行限位,滑杆208的位置调节完成后通过旋转锁紧器209可对滑杆208进行锁定。
43.具体地,所述吊环304底部活动连接有吊钩305,所述吊钩305底部固定连接有绳索306,所述绳索306底部固定连接有圆球307,所述圆球307一侧设有护套308,所述护套308用于对患者手部的固定,所述圆球307用于患者的握持。
44.本实施方案中,绳索306顶部可通过吊钩305与吊环304相连,患者可对圆球307进行握持,通过护套308可对患者的手部进行捆绑,避免中风偏瘫患者手部力量较小,无法对圆球307进行握持。
45.具体地,所述摆动杆302一端开设有弧形限位器309,所述弧形限位器309位于转轴
301一侧,所述弧形限位器309内腔设有限位杆310,所述限位杆310一端与安装架210表面焊接相连,所述限位杆310与弧形限位器309相互配合用于摆动杆302的限位作用。
46.本实施方案中,限位杆310与弧形限位器309相互配合用于摆动杆302的限位作用。
47.具体地,所述安装架210上表面一端安装有驱动机构4,所述驱动机构4由电机座401、伺服电机402和转盘403组成,所述电机座401焊接在安装架210上表面一端,所述电机座401顶部一侧安装有伺服电机402,所述伺服电机402的动力输出端连接有转盘403,使所述转盘403位于安装架210另一侧,所述伺服电机402用于转盘403的驱动。
48.本实施方案中,通过控制伺服电机402进行转动,伺服电机402可带动转盘403进行旋转,转盘403在转动的过程中可通过连杆404驱动摆动杆302进行摆动,从而实现自动带动患者的手臂进行上下摆动,到达对瘫痪患者的上肢力量训练。
49.具体地,所述转盘403一侧表面转动连接有连杆404,所述连杆404用于动力的传递。
50.本实施方案中,通过连杆404可对驱动机构4输出端的推力进行传递。
51.具体地,所述摆动杆302上表面一端焊接有固定座405,所述连杆404插接在固定座405内腔,所述固定座405一侧活动插接有连接销轴406。
52.本实施方案中,通过连接销轴406可对固定座405与连杆404进行快速的连接,从而可通过驱动机构4带动摆动杆302进行摆动。
53.工作时,机架1底部安装有自锁式万向轮101,通过自锁式万向轮101可对上肢训练装置进行灵活的移动,绳索306顶部可通过吊钩305与吊环304相连,患者可对圆球307进行握持,通过护套308可对患者的手部进行捆绑,避免中风偏瘫患者手部力量较小,无法对圆球307进行握持,两只手通过交替下拉圆球307,从而可通过两组绳索306带动摆动杆302围绕转轴301进行往复式上下摆动,从而可实现对中风偏瘫患者上肢力量的训练,其中转轴301一端套装有扭簧303,通过扭簧303对摆动杆302施加扭力,可使摆动杆302在没有外力推动时可始终保持平衡状态,吊环304共设置有多组,使用者可根据使用需求选择合适的吊环304对吊钩305进行悬挂,选择距离转轴301越远的吊环304时可获得更大的力臂,使用者拉动圆球307所需要的力量越小,选择距离转轴301越近的吊环304时可获得较小的力臂,使用者拉动圆球307所需要的力量越大,从而在使用过程中根据使用需求对上肢训练的力量进行调节,通过旋转手轮206,手轮206与丝轴205相互配合可带动升降板203沿着导向柱201进行升降,从而可对训练机构3的高度进行调节,这样可适应患者采用站姿和坐姿进行上肢训练使用更加的便捷,当患者为卧床患者时,可将上肢训练装置移动到护理床一端,通过推动滑杆208,滑杆208沿着滑槽207进行移动,从而通过安装架210将训练机构3推出,通过限位座212和限位槽211相互配合可对滑杆208滑出的距离进行限位,滑杆208的位置调节完成后通过旋转锁紧器209可对滑杆208进行锁定,然后将连杆404一端与固定座405相互插接,固定座405内插入连接销轴406可对连杆404与固定座405相连,通过控制伺服电机402进行转动,伺服电机402可带动转盘403进行旋转,转盘403在转动的过程中可通过连杆404驱动摆动杆302进行摆动,从而实现自动带动患者的手臂进行上下摆动,到达对瘫痪患者的上肢力量训练,通过弧形限位器309和限位杆310相互配合可对摆动杆302的摆动角度进行限位。
54.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存
在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
55.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。