1.本发明涉及地图选择装置、存储地图选择用计算机程序的存储介质以及地图选择方法。
背景技术:
2.车辆的自动驾驶控制系统为了对车辆进行自动控制而参照的高精度的道路地图包含有用于对车辆的当前地进行推定的与道路有关的信息。地图具有道路以及道路周边的车道区划线、标识或者构造物等的道路特征物的位置信息。
3.对于车辆能够执行的自动控制的控制等级,与车辆的硬件一起而基于地图所具有的信息来决定。即使相同的车辆,根据行驶所使用的地图,能够执行的自动控制的控制等级也可能不同。车辆的自动控制的控制等级越高,车辆自动地进行控制的比例越多,驾驶员进行控制的比例越少,因此,驾驶员的负担降低。
4.车辆的自动控制的控制等级例如被分类为1~5。在等级1中,进行车辆中的单一功能的动作的控制,例如仅车辆的左右方向或者前后方向的动作中的一个被进行控制。在等级2中,进行车辆中的组合了多个功能的动作的控制,例如车辆的左右方向和前后方向的动作被同时地进行控制。在等级3中,在特定条件下,在驾驶员的监视下进行车辆的自动驾驶的控制。在等级4中,在特定条件下进行车辆的完全的自动驾驶的控制。在等级5中,无条件地进行车辆中的完全的自动驾驶的控制。对于等级1和2的控制,驾驶员成为主体来对车辆进行操作,因此,一般也被称为手动驾驶控制。对于等级3~5的控制,车辆的自动驾驶控制系统成为主体来对车辆进行操作,因此,一般被称为自动驾驶控制。
5.例如,专利文献1提出的电子装置仅使用一个地图,作为到达目的地的行驶路线,利用预测行驶时间信息和自动驾驶控制的等级所对应的用户负担系数,提示用户负担时间成为最小的行驶路线。
6.现有技术文献
7.专利文献1:日本特开2017-32421号公报
技术实现要素:
8.发明要解决的技术问题
9.今后,预想会由地图供应商提供在车辆的自动控制的行驶中所使用的各种各样的地图。根据地图中的道路特征物的位置的精度、登记于地图的道路特征物的种类和数量等,车辆的控制等级会受到影响,因此,与所利用的地图的种类相应地设定了自动控制的控制等级。其结果,认为在对相同的道路区间提供了与不同的控制等级对应的多个地图的情况下,当车辆以自动控制进行行驶时,驾驶员的负担会根据所选择的地图而不同。
10.于是,本发明的目的在于提供一种地图选择装置,其在车辆以自动控制进行行驶时,在存在登载有行驶路线所包含的一个区间的多个地图的情况下,对地图进行选择以使
得降低驾驶员的负担。
11.用于解决问题的技术方案
12.根据一个实施方式,提供一种地图选择装置。该地图选择装置具有:具有:取得部,其取得车辆的从当前地到目的地的行驶路线;存储部,其存储多个地图;以及地图选择部,其从存储于存储部的多个地图中,以使得包含行驶路线的当前地到目的地的方式选择登载着行驶路线的一个以上的地图,地图选择部在存在登载有行驶路线所包含的一个区间的多个候选地图的情况下,选择适于自动控制的候选地图来作为利用于该区间的行驶的地图。
13.在该地图选择装置中,地图选择部优选基于多个候选地图各自的用于对适于自动控制这一情况进行评价的评价值,对利用于区间的行驶的地图进行选择。
14.在该地图选择装置中,优选还具有评价值算出部,所述评价值算出部针对登载有行驶路线所包含的一个区间的多个候选地图,分别基于车辆能够使用该候选地图进行行驶的自动控制的控制等级来算出评价值。
15.另外,在该地图选择装置中,优选具有行驶距离算出部,所述行驶距离算出部按由地图选择部选择的一个以上的地图所对应的自动控制的控制等级,求出在一个以上的地图的各地图登载的行驶路线的区间的长度,算出车辆在行驶路线上行驶时能够以多个控制等级的各个控制等级进行行驶的距离。
16.根据其他实施方式,提供一种非瞬时性的存储介质,是计算机能够读取的存储地图选择用计算机程序的存储介质。该地图选择用计算机程序使处理器执行:经由取得部输入车辆的从当前地到目的地的行驶路线,从存储于存储部的多个地图中,以使得包含行驶路线的当前地到目的地的方式选择登载着行驶路线的一个以上的地图,所述地图选择用计算机程序使处理器执行:在对登载着行驶路线的一个以上的地图进行选择时,在存在登载有行驶路线所包含的一个区间的多个候选地图的情况下,选择适于自动控制的候选地图来作为利用于该区间的行驶的地图。
17.另外,根据其他实施方式,提供一种地图选择方法。地图选择装置执行:经由取得部输入车辆的从当前地到目的地的行驶路线,从存储于存储部的多个地图中,以使得包含行驶路线的当前地到目的地的方式选择登载着行驶路线的一个以上的地图,所述地图选择装置执行:在对登载着行驶路线的一个以上的地图进行选择时,在存在登载有行驶路线所包含的一个区间的多个候选地图的情况下,选择适于自动控制的候选地图来作为利用于该区间的行驶的地图。
18.发明的效果
19.本发明涉及的地图选择装置在车辆以自动控制进行行驶时,在存在登载有行驶路线所包含的一个区间的多个地图的情况下,对地图进行选择以使得降低驾驶员的负担,因此可实现能够降低驾驶员的负担这一效果。
附图说明
20.图1是安装有地图选择装置的地图选择系统的概略结构图。
21.图2是车辆的概略结构图。
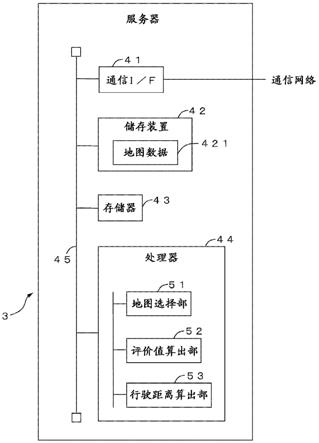
22.图3是服务器的硬件结构图。
23.图4是地图选择处理的时序图。
24.图5是表示显示于用户接口的显示部的图像的图。
25.图6是服务器的处理器的地图选择部的动作流程图。
26.图7对地图选择部的动作进行说明的图。
27.图8是服务器的处理器的行驶距离算出部的动作流程图。
28.标号说明
29.1 地图选择系统
[0030]2ꢀꢀ
车辆
[0031]
11
ꢀꢀ
无线通信终端
[0032]
12
ꢀꢀ
测位信息接收机
[0033]
13
ꢀꢀ
导航装置
[0034]
14
ꢀꢀ
用户接口
[0035]
15
ꢀꢀ
地图存储装置
[0036]
16
ꢀꢀ
车辆控制装置
[0037]
17
ꢀꢀ
行驶路线选择装置
[0038]
18
ꢀꢀ
车内网络
[0039]
19
ꢀꢀ
挡风玻璃
[0040]
21
ꢀꢀ
通信接口
[0041]
22
ꢀꢀ
存储器
[0042]
23
ꢀꢀ
处理器
[0043]
24
ꢀꢀ
信号线
[0044]
31
ꢀꢀ
行驶路线生成部
[0045]
32
ꢀꢀ
行驶距离通知部
[0046]
33
ꢀꢀ
地图存储部
[0047]
3 服务器
[0048]
41
ꢀꢀ
通信接口
[0049]
42
ꢀꢀ
储存装置
[0050]
421
ꢀꢀ
地图数据
[0051]
43
ꢀꢀ
存储器
[0052]
44
ꢀꢀ
处理器
[0053]
45
ꢀꢀ
通信线
[0054]
51
ꢀꢀ
地图选择部
[0055]
52
ꢀꢀ
评价值算出部
[0056]
53
ꢀꢀ
行驶距离算出部
[0057]4ꢀꢀ
网络
[0058]5ꢀꢀ
基站
具体实施方式
[0059]
图1是安装有地图选择装置的地图选择系统的概略图。以下,参照图1对本说明书所公开的地图选择系统1的概要进行说明。
[0060]
本实施方式中的地图选择系统1至少包括车辆2和服务器3来构成。车辆2至少包括用户接口(ui)14、地图存储装置15、车辆控制装置16以及行驶路线选择装置17。服务器3至少包括储存装置42和地图选择部51。车辆和服务器3通过对经由通信网络4和网关(未图示)等连接的基站5进行访问来相互连接。在图1中,仅图示了一个车辆2和一个基站5,但地图选择系统1也可以具有多个车辆2,还可以是多个基站5连接于通信网络4。
[0061]
行驶路线选择装置17向服务器3发送车辆2的从当前地s到目的地g的行驶路线r。将包含表示行驶路线r的导航地图的图像142的一个例子表示于图1。
[0062]
当取得行驶路线r时,地图选择部51从存储于储存装置42的多个地图中,以使得包含行驶路线r的当前地s~目的地g的方式选择登载有行驶路线r的一个以上的地图。将以使得包含行驶路线r的当前地s~目的地g的方式选择的3个候选地图m1~m3的一个例子表示于图1。
[0063]
地图选择部51在存在登载有行驶路线r所包含的一个区间的多个候选地图的情况下,选择适于自动控制的候选地图来作为利用于该区间的行驶的地图。在用于对适于自动控制这一情况进行评价的评价值为地图m3(高)
→
地图m2
→
地图m1(低)的情况下,在区间d1中由地图选择部51选择地图m2,在区间d2和d3中由地图选择部51选择地图m3,在区间d4中由地图选择部51选择地图m1。地图选择部51向车辆2发送行驶路线r和区间的关系、以及与按各区间选择的地图有关的信息。
[0064]
车辆2的行驶路线选择装置17从服务器3接收行驶路线r和区间d1~d4的关系、以及与按各区间选择的地图m1~m3有关的信息,使这些信息存储于地图存储装置15。行驶路线选择装置17使用ui14,显示包含表示行驶路线r的导航地图的图像142。车辆2的车辆控制装置16基于存储于地图存储装置15的行驶路线r和区间d1~d4的关系、以及与按各区间选择的地图m1~m3有关的信息进行控制,以使得车辆2在各区间中以能够行驶的自动控制的控制等级进行行驶。由此,车辆2能够使用与自动控制有关的评价值最高的地图,在行驶路线r的各区间中以与地图对应的自动控制的控制等级进行行驶,因此,地图选择系统1能够在车辆2以自动控制进行行驶时进一步降低驾驶员的负担。
[0065]
关于地图选择系统1中的车辆2和服务器3的结构、车辆2和服务器3中的详细的处理流程,将在后面进行描述。此外,在地图选择系统1中,也可以包括多个车辆2,但关于地图选择处理,各车辆2具有相同的结构、且执行相同的处理即可,因此,以下对一个车辆2进行说明。
[0066]
图2是车辆2的概略结构图。车辆2具有无线通信终端11、测位信息接收机12、导航装置13、ui14、地图存储装置15、车辆控制装置16、行驶路线选择装置17以及挡风玻璃19等。进一步,车辆2也可以为了推定车辆2的位置、且检测车辆2周围的其他物体而具有取得呈现车辆2周围的环境的图像的摄像头(未图示)。另外,车辆2也可以具有lidar传感器这样的用于测定到车辆2周围的物体为止的距离的测距传感器(未图示)。
[0067]
无线通信终端11、测位信息接收机12、导航装置13、ui14、地图存储装置15、车辆控制装置16以及行驶路线选择装置17经由遵循了控制器局域网络这样的标准的车内网络18以能够通信的方式相连接。
[0068]
无线通信终端11是通信部的一个例子,是执行遵循了预定的无线通信标准的无线通信处理的设备,例如通过对基站5进行访问,经由基站5和通信网络4来与服务器3连接。
[0069]
测位信息接收机12输出表示车辆2的当前地的测位信息。例如,测位信息接收机12能够设为gps接收机。测位信息接收机12每当以预定的接收周期取得测位信息时,向导航装置13和车辆控制装置16输出测位信息和取得了测位信息的测位信息取得时刻。
[0070]
导航装置13由行驶路线选择装置17进行控制,基于导航用地图数据、车辆2的目的地以及车辆2的当前地,生成车辆2的从当前地到目的地的行驶路线r。导航装置13使用戴克斯特拉法(dijkstra)法等的算法,按照距离优先、时间优先、费用优先、一般道路优先或者高速公路优先等的基准,生成当前地~目的地的行驶路线r。导航装置13使用测位信息接收机12所输出的测位信息来作为车辆2的当前地。导航装置13每当生成行驶路线r时,将该行驶路线r经由车内网络18输出给行驶路线选择装置17。
[0071]
ui14由行驶路线选择装置17进行控制,对驾驶员通知车辆2的行驶信息,另外,生成与来自驾驶员的操作相应的操作信号。车辆2的行驶信息包含与车辆2的当前地以及行驶路线r等有关的信息等。ui14具有显示图像的显示部141。作为ui14,例如可以使用在液晶显示装置安装了触摸面板的带触摸面板的显示装置。
[0072]
每当行驶路线r被设定时,地图存储装置15存储从服务器3接收的行驶路线r和区间的关系、以及与按各区间选择的地图有关的信息。
[0073]
车辆控制装置16基于与由未图示的物体检测装置检测到的其他物体有关的信息,跟踪其他物体来推定将来的轨迹。并且,车辆控制装置16基于车辆2的行驶路线r、地图存储装置15存储的行驶路线r和区间的关系以及与按各区间选择的地图有关的信息、由车辆控制装置16推定的其他物体的将来的轨迹、车辆2的当前地等,以使得在车辆2与其他物体之间保持预定距离的方式生成车辆2的驾驶计划。并且,车辆控制装置16基于该驾驶计划来生成控制信号。并且,车辆控制装置16经由车内网络18向对车辆2的转向轮进行控制的致动器(未图示)、车辆2的发动机等的驱动装置(未图示)或者制动器(未图示)发送该控制信号。车辆控制装置16具有的功能的全部或者一部分例如是由在处理器上工作的计算机程序实现的功能模块。或者,车辆控制装置16具有的功能的全部或者一部分也可以是专用的运算电路。
[0074]
行驶路线选择装置17执行向服务器3发送使用导航装置13生成的行驶路线r的行驶路线生成处理。另外,行驶路线选择装置17执行如下的行驶距离通知处理:从服务器3接收车辆2按照行驶路线r进行行驶的情况下的自动控制的各控制等级的行驶距离,经由ui14向驾驶员通知所接收到的信息。进一步,行驶路线选择装置17执行如下的地图存储处理:向服务器3发送表示由驾驶员选择的行驶路线r的信息,从服务器3接收所选择的行驶路线r和区间的关系、以及与按各区间所选择的地图有关的信息,将所接收到的信息存储于地图存储装置15。因此,行驶路线选择装置17具备通信i/f21、存储器22以及处理器23。通信i/f21、存储器22以及处理器23经由信号线24相连接。
[0075]
通信接口(i/f)21是车内通信部的一个例子,具有用于将行驶路线选择装置17连接于车内网络18的接口电路。即,通信i/f21经由车内网络18与无线通信终端11、测位信息接收机12、导航装置13、ui14、地图存储装置15以及车辆控制装置16等连接。通信i/f21每当被从处理器23给与表示行驶路线r或者由驾驶员选择的行驶路线r的信息时,将所给与的信息发送给无线通信终端11。另外,通信i/f21每当从无线通信终端11接收车辆2按照行驶路线r进行行驶的情况下的自动控制的各控制等级的行驶距离或者被使用于在所选择的行驶
路线r上行驶的地图时,将所接收到的信息输出给处理器23。
[0076]
存储器22是存储部的一个例子,例如具有易失性的半导体存储器和非易失性的半导体存储器。并且,存储器22存储在由行驶路线选择装置17的处理器23执行的信息处理中所使用的应用的计算机程序以及各种数据、对车辆2进行识别的车辆id等。车辆id例如可以用于在服务器3与多个车辆2进行通信的情况下对各车辆2进行识别。
[0077]
处理器23具有一个或者多个cpu(central processing unit,中央处理单元)及其外围电路。处理器23也可以还具有逻辑运算单元、数值运算单元或者图形处理单元这样的其他运算电路。在处理器23具有多个cpu的情况下,也可以按各cpu而具有存储器。
[0078]
处理器23具有执行行驶路线生成处理的行驶路线生成部31、执行行驶距离通知处理的行驶距离通知部32以及执行地图存储处理的地图存储部33。处理器23具有的这些各部例如是由在处理器23上工作的计算机程序实现的功能模块。或者,处理器23具有的这些各部也可以是设置于处理器23的专用的运算电路。
[0079]
图3是服务器3的硬件结构图。服务器3具有通信接口(i/f)41、储存装置42、存储器43以及处理器44等。通信i/f41、储存装置42、存储器43以及处理器44经由信号线45相连接。服务器3也可以还具有键盘以及鼠标这样的输入装置和液晶显示器这样的显示装置。
[0080]
通信i/f41是取得部的一个例子,具有用于将服务器3连接于通信网络4的接口电路。并且,通信i/f41构成为能够经由通信网络4以及基站5与车辆2进行通信。
[0081]
储存装置42是存储部的一个例子,例如具有作为非瞬时性的存储介质的硬盘装置或者光记录介质及其访问装置。并且,储存装置42存储包含被使用于车辆2进行行驶的多个地图的地图数据421等。储存装置42也可以还存储车辆2的车辆id。进一步,储存装置42也可以存储在处理器44上执行的、用于执行与地图选择处理等关联的服务器3的处理的计算机程序。
[0082]
地图数据421存储多个地图、表示分别表示于多个地图的地域的信息、以及能够按各地图进行应对的自动控制的控制等级。多个地图分别具有表示于地图的各个道路特征物(例如车道区划线、临时停止线、速度显示这样的道路标示、道路标识或者信号机等)的位置以及种类。另外,多个地图分别也可以具有与交通管制有关的信息、与事故有关的信息、与其他车辆、行人有关的信息以及与信号有关的信息。
[0083]
基于分别登记于多个地图的道路特征物的位置的精度、和登记于地图的道路特征物的种类以及数量等,设定有能够按各地图进行应对的自动控制的控制等级。多个地图各自中的道路特征物的位置的精度会对基于道路特征物的位置推定的车辆的位置的精度产生影响。另外,登记于地图的道路特征物的种类会对能够检测该种类的道路特征物的传感器产生制约。因此,登记于地图的道路特征物的种类会按照搭载于车辆2的传感器,对基于道路特征物的位置推定的车辆的位置的精度产生影响。登记于地图的道路特征物的数量会对基于所检测到的道路特征物推定车辆的位置的频度产生制约,因此,会对基于道路特征物的位置推定的车辆的位置的精度产生影响。
[0084]
存储器43是存储部的其他的一个例子,例如具有非易失性的半导体存储器和易失性的半导体存储器。并且,存储器43暂时性地存储地图选择处理中的与服务器3关联的处理的执行期间中所生成的各种数据、和从车辆2接收到的行驶路线这样的通过与车辆2的通信取得的各种数据等。
[0085]
处理器44具有一个或者多个cpu(central processing unit)及其外围电路。处理器44也可以还具有逻辑运算单元或者数值运算单元这样的其他运算电路。并且,处理器44执行地图选择处理中的与服务器3关联的处理。
[0086]
处理器44具有地图选择部51,该地图选择部51从存储于储存装置42的多个地图中以使得包含行驶路线r的当前地~目的地的方式选择登载着行驶路线r的一个以上地图。另外,处理器44具有评价值算出部52,该评价值算出部52针对登载有行驶路线r所包含的一个区间的多个候选地图,分别基于车辆2能够使用候选地图进行行驶的自动控制的控制等级等,算出多个候选地图各自的用于对适于自动控制这一情况进行评价的评价值。进一步,处理器44具有行驶距离算出部53,该行驶距离算出部53按由地图选择部51选择的一个以上的地图所对应的自动控制的控制等级,求出在一个以上的地图各自所登载的行驶路线r的区间的长度,算出车辆2在行驶路线r上行驶时能够以多个控制等级的各个控制等级进行行驶的距离。处理器44具有的这些各部例如是由在处理器44上工作的计算机程序实现的功能模块。或者,处理器44具有的这些各部也可以是设置于处理器44的专用的运算电路。
[0087]
图4是地图选择处理的时序图。在地图选择系统1中,每当在车辆2中生成行驶路线r时,按图4所示的时序图反复执行地图的选择。
[0088]
车辆2的行驶路线选择装置17中的处理器23的行驶路线生成部31,经由ui14从驾驶员输入车辆2的目的地(步骤s101)。通常在车辆2开始行驶之前的设定行驶路线r时进行该处理。
[0089]
行驶路线生成部31将从ui14输入的车辆2的目的地输入到导航装置13,使导航装置13按照多个基准在各个基准下生成从当前地到目的地的行驶路线r(步骤s102)。作为多个基准,具有距离优先、时间优先、费用优先、一般道路优先以及高速公路优先。此外,行驶路线生成部31生成遵循了距离优先、时间优先、费用优先、一般道路优先以及高速公路优先中中的至少一个的基准的行驶路线r即可。
[0090]
行驶路线生成部31通过经由通信i/f21向无线通信终端11输出由导航装置13生成的多个行驶路线r,经由基站5和通信网络4向服务器3发送多个行驶路线r(步骤s103)。并且,服务器3的处理器44经由通信i/f41接收多个行驶路线r。
[0091]
服务器3中的处理器44的地图选择部51针对多个行驶路线r分别从存储于储存装置42的多个地图中以使得包含行驶路线r的当前地~目的地的方式选择登载着行驶路线r的一个以上的地图(步骤s104)。在此,地图选择部51在存在登载有行驶路线r所包含的一个区间的多个候选地图的情况下,选择适于自动控制的候选地图来作为利用于该区间的行驶的地图。并且,地图选择部51向行驶距离算出部53通知行驶路线r和区间的关系、以及与按各区间选择的地图有关的信息。对于地图选择部51的地图选择处理的详细,将参照图6和图7来在后面进行描述。
[0092]
服务器3中的处理器44的行驶距离算出部53针对多个行驶路线r分别按由地图选择部51选择的一个以上的地图所对应的自动控制的控制等级,求出在一个以上地图的各地图登载的行驶路线r的区间的长度。并且,行驶距离算出部53算出车辆2在行驶路线r上行驶时能够以多个控制等级的各个控制等级进行行驶的距离(步骤s105)。对于行驶距离算出部53的行驶距离算出处理的详细,将参照图8来在后面进行描述。
[0093]
行驶距离算出部53针对多个行驶路线分别经由通信i/f41、并经由通信网络4以及
基站5向车辆2发送车辆2在行驶路线r上行驶时能够以多个控制等级的各个控制等级进行行驶的距离(步骤s106)。并且,车辆2的无线通信终端11针对多个行驶路线分别接收车辆2在行驶路线r上行驶时能够以多个控制等级的各个等级进行行驶的距离,向行驶路线选择装置17输出这些信息。
[0094]
行驶路线选择装置17中的处理器23的行驶距离通知部32针对多个行驶路线分别经由ui14向驾驶员通知车辆2在行驶路线r上行驶时能够以多个控制等级的各个等级进行行驶的距离(步骤s107)。
[0095]
图5是表示显示于ui14的显示部141的图像142的图。在显示于ui14的图像142中,显示有包含车辆2的从当前地s到目的地g的行驶路线r的导航地图。另外,在图像142中显示有对生成了行驶路线r的基准进行选择的距离优先按键b1、时间优先按键b2、费用优先按键b3、一般道路优先按键b4以及高速公路优先按键b5。在图像142中显示有基于由驾驶员选择的基准生成的行驶路线r。另外,在图像142中显示有车辆2在该行驶路线r上行驶时能够以多个控制等级的各个等级进行行驶的距离h1、h2、h3。另外,在图像142中显示有车辆2在该行驶路线r上行驶的情况下的距离、所需时间、费用等。行驶距离通知部32每当距离优先按键b1~高速道优先按键b5中的某一个被驾驶员操作时,在显示部141显示包括与被进行了操作的按键对应的行驶路线r和能够以多个控制等级的各个等级进行行驶的距离等的图像142。此外,图5是表示ui142所表示的图像的一个例子的图,可以根据行驶路线表示其他地图。
[0096]
行驶距离通知部32经由ui14输入由驾驶员选择的行驶路线r(步骤s108)。行驶距离通知部32当决定按键b6被驾驶员操作时,判定为由驾驶员选择了显示于ui14的行驶路线r。
[0097]
行驶距离通知部32通过经由通信i/f21向无线通信终端11输出表示被选择了的行驶路线r的信息,从而经由基站5和通信网络4向服务器3发送表示被选择了的行驶路线r的信息(步骤s109)。并且,服务器3的通信i/f41接收表示被选择了的行驶路线r的信息。通信i/f41向处理器44输出表示被选择了的行驶路线r的信息。
[0098]
服务器3中的处理器44的地图选择部51基于从通信i/f41给与的表示行驶路线r的信息,经由通信i/f41、并经由通信网络4和基站5向车辆2发送由驾驶员选择的行驶路线r和区间的关系、以及与按各区间选择的一个或者多个地图有关的信息(步骤s110)。并且,车辆2的无线通信终端11接收这些信息,并输出给行驶路线选择装置17。
[0099]
车辆2的行驶路线选择装置17中的处理器23的地图存储部33使从无线通信终端11输入的行驶路线r和区间的关系、以及与按各区间选择的一个或者多个地图有关的信息存储于地图存储装置15(步骤s111)。然后,车辆2的车辆控制装置16基于存储于地图存储装置15的行驶路线r和区间的关系、以及与按各区间选择的一个或者多个地图有关的信息,在车辆2能够行驶的自动控制的控制等级下,对行驶路线r的各区间的车辆2的行驶进行控制。例如,在图7所示的例子中,车辆控制装置16在行驶路线r的区间d1中,在控制等级2下对车辆2的行驶进行控制,在行驶路线r的区间d2和d3中,在控制等级3下对车辆2的行驶进行控制,在行驶路线r的区间d4中,在控制等级1下对车辆2的行驶进行控制。
[0100]
图6是服务器3的处理器44的地图选择部51的动作流程图。以下,参照图6所示的动作流程图,对步骤s104中的地图选择部51的地图选择定处理进行说明。
[0101]
地图选择部51关于遵循了距离优先、时间优先、费用优先、一般道路优先以及高速公路优先的基准的多个行驶路线r分别执行步骤s202~步骤s203的循环处理(步骤s201~步骤s204)。
[0102]
地图选择部51从存储于储存装置42的多个地图中,基于表示多个地图各自所表示的地域的信息,以使得包含行驶路线r的当前地~目的地的方式选择登载着行驶路线r的一个以上的地图(步骤s202)。
[0103]
图7是对地图选择部51的动作进行说明的图。在图7所示的例子中,对于行驶路线r,选择了地图m1、地图m2以及地图m3。地图m1对应于自动控制的控制等级1,地图m2对应于自动控制的控制等级2,地图m3对应于自动控制的控制等级3。
[0104]
行驶路线r的区间d1登载于地图m1和地图m2。行驶路线r的区间d2登载于地图m1、地图m2以及地图m3。行驶路线r的区间d3登载于地图m2和地图m3。行驶路线r的区间d4仅登载于地图m1。
[0105]
登载有行驶路线r的同一区间的多个地图分别成为用于针对该区间从多个地图中选择一个地图的候选地图。在行驶路线r的区间d1中,地图m1和地图m2成为候选地图。在行驶路线r的区间d2中,地图m1、地图m2以及地图m3成为候选地图。在行驶路线r的区间d3中,地图m2和地图m3成为候选地图。
[0106]
地图选择部51在存在登载有行驶路线r所包含的一个区间的多个候选地图的情况下,选择适于自动控制的候选地图来作为利用于该区间的行驶的地图(步骤s203)。具体而言,地图选择部51基于多个候选地图各自的用于对适于自动控制这一情况进行评价的评价值,选择利用于区间的行驶的地图。在此,地图选择部51选择评价值最高的候选地图来作为利用于区间行驶的地图。
[0107]
在图7所示的例子中,地图m1的评价值为1,地图m2的评价值为10,地图m3的评价值为100。地图选择部51对于区间d1选择作为评价值最高的候选地图的地图m2,对于区间d2选择作为评价值最高的候选地图的地图m3,对于区间d3选择作为评价值最高的候选地图的地图m3。此外,关于仅登载于地图m1的区间d4,在上述的步骤s202中通过地图选择部51选择了地图m1。
[0108]
这样,地图选择部51对地图进行选择以使得用于对适于自动控制这一情况进行评价的评价值最高的地图的登载于行驶路线r的区间成为最长。
[0109]
接着,以下对服务器3的处理器44的评价值算出部52针对成为了候选地图的地图算出评价值的处理进行说明。评价值算出部52针对多个候选地图分别基于包括车辆2能够使用该候选地图进行行驶的自动控制的控制等级等的特征量来算出评价值。车辆2通过使用与车辆2的硬件能够行驶的自动控制的控制等级以上的控制等级对应的地图,车辆2的硬件能够行驶的控制等级下的行驶成为可能。例如,若是具有能够以控制等级3进行行驶的硬件的车辆,则通过使用与控制等级3以上的控制等级对应的地图,控制等级3下的行驶成为可能。因此,车辆2能够使用该候选地图进行行驶的自动控制的控制等级意味着地图所对应的自动控制的控制等级以下、且车辆2的硬件能够行驶的最高的控制等级。评价值算出部52也可以与自动控制的控制等级一起还基于地图的新鲜度信息(当前的时刻与制作了地图的制作日期时间之间的期间的长度)、表示制作了地图的供应商的可靠度的供应商可靠度信息、表示登记于地图的道路特征物的位置的精度的位置精度信息、车辆2过去使用该地图以
自动控制进行行驶时通过车辆控制装置16要求(超控(override)要求)了将车辆2的控制从自动控制向驾驶员的手动控制进行移管的移管要求次数、地图的信息被进行了更新的更新次数等的地图的特征量,算出评价值。评价值算出部52每当在车辆2中产生超控要求时,从车辆2接收表示在产生了超控要求时所使用了的地图的信息,对与该地图关联的移管要求次数进行递增(increment),将被更新了的移管次数与该地图关联地存储于储存装置42。
[0110]
评价值算出部52使用下述式(1)算出地图的评价值y。
[0111]
y=w
·
x
ꢀꢀꢀ
(1)
[0112]
在此,x表示具有控制等级、对新鲜度信息进行表示的数值、对供应商可靠度信息进行表示的数值、对位置精度信息进行表示的数值、移管要求次数、更新次数等的地图的特征量来作为成分的矢量,w表示具有各个地图的特征量的权重来作为成分的矢量。w
·
x表示矢量w与矢量y的内积。对于地图的特征量的权重,例如使用多变量解析来决定。
[0113]
地图的特征量及其权重与地图关联地记录于储存装置42,评价值算出部52每当算出成为了候选地图的地图的评价值时,从储存装置42读出这些信息。此外,关于地图的新鲜度信息,在储存装置42中存储有制作了地图的制作日期时间,评价值算出部52从储存装置42读出制作了地图的制作日期时间,求出当前的时刻与制作了地图的制作日期时间之间的期间的长度,算出表示新鲜度信息的数值。以上是评价值算出部52算出评价值的处理的说明。
[0114]
地图选择部51针对多个行驶路线r分别执行上述的步骤s202~步骤s203的循环处理。以上是步骤s104中的地图选择部51的地图选择定处理的说明。
[0115]
图8是服务器3的处理器44的行驶距离算出部53的动作流程图。以下,参照图8所示的动作流程图,对步骤s105中的行驶距离算出部53的行驶距离算出处理进行说明。
[0116]
行驶距离算出部53关于遵循了距离优先、时间优先、费用优先、一般道路优先以及高速公路优先的基准的多个行驶路线r分别执行步骤s302的循环处理(步骤s301~步骤s303)。
[0117]
行驶距离算出部53关于作为循环处理的对象的行驶路线r,按由地图选择部51选择的一个以上的地图所对应的自动控制的控制等级,取出分别登载于一个以上的地图的行驶路线r的区间的长度。并且,行驶距离算出部53算出车辆2在行驶路线r上行驶时能够以多个控制等级的各个控制等级进行行驶的距离(步骤s302)。
[0118]
在图7所示的例子中,通过地图选择部51对行驶路线r的区间d1选择控制等级2所对应的地图m2,对行驶路线r的区间d2和d3选择控制等级3所对应的地图m3。另外,通过地图选择部51对行驶路线r的区间d3选择控制等级1所对应的地图m1。
[0119]
行驶距离算出部53求出登载于控制等级1所对应的地图m1的区间d4的长度,算出车辆2在行驶路线r上行驶时能够以控制等级1进行行驶的距离。另外,行驶距离算出部53求出登载于控制等级2所对应的地图m2的区间d1的长度,算出车辆2在行驶路线r上行驶时能够以控制等级2进行行驶的距离。进一步,行驶距离算出部53求出对登载于控制等级3所对应的地图m3的区间d2的长度和区间d3的长度进行合计而得到的长度,算出车辆2在行驶路线r上行驶时能够以控制等级3进行行驶的距离。
[0120]
行驶距离算出部53针对多个行驶路线r分别执行上述的步骤s302的循环处理。以上是步骤s105中的行驶距离算出部53的行驶距离算出处理的说明。
[0121]
如以上说明的那样,该地图选择装置经由取得部取得车辆的从当前地到目的地的行驶路线。地图选择装置从存储于存储部的多个地图中以使得包含行驶路线的当前地~目的地的方式选择登载着行驶路线的一个以上的地图。在此,地图选择装置在存在登载有行驶路线所包含的一个区间的多个候选地图的情况下,选择适于自动控制的候选地图来作为利用于该区间的行驶的地图。由此,地图选择装置在车辆以自动控制进行行驶时,在存在登载有行驶路线所包含的一个区间的多个地图的情况下,以使得降低驾驶员的负担的方式选择地图,因此能够降低驾驶员的负担。进一步,地图选择装置按所选择的一个以上的地图所对应的自动控制的控制等级,求出分别登载于一个以上的地图的行驶路线的区间的长度,算出车辆在行驶路线上行驶时能够以多个控制等级的各个控制等级进行行驶的距离。由此,地图选择装置通过向驾驶员通知车辆在行驶路线上行驶时能够以多个控制等级的各个控制等级进行行驶的距离,由此驾驶员能够具体地掌握负担的程度。
[0122]
在本发明中,对于上述的实施方式的地图选择装置、存储地图选择用计算机程序的存储介质以及地图选择方法,只要不脱离本发明的宗旨,则可以适当地进行变更。另外,本发明的技术范围不限定于那些实施方式,而是扩及到权利要求书所记载的发明及其等同物。
[0123]
例如,在上述的实施方式中,服务器具有地图选择置的功能,但地图选择装置也可以配置于车辆。
[0124]
另外,在上述的实施方式中,评价值算出部算出评价值的方法是一个例子,并不限定于该方法。例如,评价值算出部也可以仅基于自动控制的控制等级来算出评价值。另外,评价值算出部也可以与自动控制的控制等级一起还基于上述的以外的地图的特征量来算出评价值。进一步,评价值算出部也可以与自动控制的控制等级一起还基于上述的多个地图的特征量中的一部分的特征量来算出评价值。
[0125]
另外,在上述的实施方式中,地图选择部针对多个行驶路线分别从存储于储存装置的多个地图中以使得包含行驶路线的当前地~目的地的方式选择登载着行驶路线的一个以上的地图。在此,在如当前地为东京、目的地为大阪那样的总移动距离长的行驶路线的情况下,有时随着车辆的移动,在车辆的地图存储装置中依次接收并存储有关东地方的多个地图、东海地方的多个地图、关西地方的多个地图。这是因为,由于地图的存储容量大,因此无法在车辆的地图存储装置中存储全部的地图。在这样的情况下,地图选择部在车辆开始行驶之前从存储于储存装置的关东地方的多个地图中以使得包含行驶路线的处于关东地方的当前地~关东地方与东海地方的边界的地点的方式选择登载着行驶路线的一个以上的地图。并且,地图选择部在车辆开始东海地方的行驶之前,从存储于储存装置的东海地方的多个地图中以使得包含行驶路线的关东地方与东海地方的边界的地点~东海地方与关西地方的边界的地点的方式选择登载着行驶路线的一个以上的地图。并且,地图选择部在车辆开始关西地方的行驶之前,从存储于储存装置的关西地方的多个地图中以使得包含行驶路线的东海地方与关西地方的边界的地点~处于关东地方的目的地的方式选择登载着行驶路线的一个以上的地图。上述的地图选择部的处理包括随着车辆的移动而反复选择登载着行驶路线的一个以上的地图。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。