1.本发明属于导航优化技术领域,具体涉及一种基于惯性导航设备的航路优化方法。
背景技术:
2.目前,船舶航线规划多依赖历史航线数据进行计算获取,或者结合气象数据进行预判路线的获取,但是,由于海上环境瞬息万变,在航行过程中航线沿线环境极大可能会出现较大变化,给海上航行带来极大不确定性和安全隐患。虽然也有根据实时获取的气象数据或航行数据进行航路优化的方式,但是该种优化方法往往是对整个航路进行完全替换或是航段的大规模更换,极易造成航路衔接不流畅、航线延长、计算不精确等情况的发生,为航行安全造成极大威胁。
技术实现要素:
3.本发明的目的在于改善现有技术中存在的不足,提供一种基于惯性导航设备的航路优化方法。
4.本发明采用的技术方案如下:
5.一种基于惯性导航设备的航路优化方法,包括以下步骤:
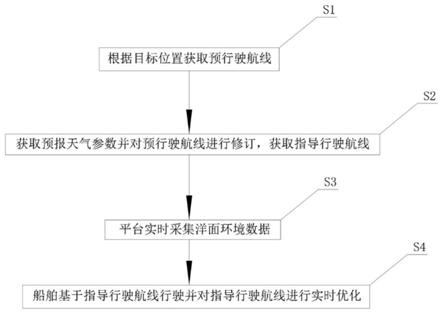
6.s1、根据目标位置获取预行驶航线;
7.s2、获取预报天气参数并对预行驶航线进行修订,获取指导行驶航线;
8.s3、平台实时采集洋面环境数据;
9.s4、船舶基于指导行驶航线行驶并对指导行驶航线进行标定;具体包括:
10.s401:船舶采用惯性导航设备按照指导行驶航线行驶,并以t为周期从平台获取海洋的环境数据;
11.s402:根据获取的海洋环境数据生成多个优化方案;
12.s403:选取优化方案并对指导行驶航线进行实时修订;
13.s404:重复步骤s401至步骤s403,直至船舶到达终点。
14.进一步地,所述步骤s401中,船舶采用惯性导航设备行驶过程中对惯性导航设备测量值进行标定,具体过程为:
15.1.1:为航线行驶过程设定多个优化点并在优化点获取惯性导航设备测量值;
16.1.2:根据陀螺常值漂移量构建粒子数据集合,在陀螺常值漂移的变化范围内随机初始化粒子数据;所述粒子数据包括速度数据和位置数据;
17.1.3:迭代计算每个粒子的速度数据和位置数据,获取最优粒子数据;
18.1.4:使用当前群体的最优粒子数据获取待标定惯性导航的陀螺常值漂移量;
19.1.5:从待标定惯性导航设备的脱落测量值中扣除步骤1.4所得陀螺常值漂移量,获取标定后的惯性导航测量值。
20.进一步地,步骤s3所述洋面环境数据的获取具体包括:
21.s301:将指导行驶航线所在区域划分为多个连续航段;
22.s302:对航段x
i
中指导行驶航线所在区域及其临近区域设置多个测样点;
23.s303:采集测样点a
ij
的实时洋面障碍数据和气象数据;a
ij
表示航段x
i
的第j个测样点。
24.进一步地,所述步骤s402中根据获取的海洋环境数据生成多个优化方案具体包括:
25.s2.1:将洋面障碍数据和气象数据分别转化为影响分值;
26.s2.2:设定多条待选路线并计算每条待选路线上测样点的影响分值之和;
27.s2.3:根据计算结果对多条待选路线进行分类;
28.s2.4:将分类结果及对应的待选路线坐标信息打包,生成多个优化方案。
29.进一步地,步骤s403中所述选取优化方案并对指导行驶航线进行实时修订具体包括:
30.s3.1:根据驾驶习惯由控制系统自动选择优化方案或由驾驶人员自主选择优化方案;
31.s3.2:将优化方案待选路线各航段的影响分值与指导行驶航线中对应航段的影响分值进行比较;
32.s3.3:根据比较结果对指导行驶航线各个航段路线数据进行融合计算;
33.s3.4:根据融合计算结果对指导行驶航线进行优化更新。。
34.综上所述,由于采用了上述技术方案,本发明的有益效果是:
35.1、通过先通过预报的天气参数获取指导行驶航线,再在行驶过程中根据实时洋面环境数据进行航段的微调整,在保证行驶的基础航线稳定的情况提高航线精确度和安全性,同时航线修订幅度小,保证航线的平稳性和可靠性,进一步提升航行安全;
36.2、通过将指导行驶航段划分为多个连续航段,并对航线所在区域及其临近区域设置测样点,以航段为单位进行航线调整,降低航线调整幅度,同时,采样点的设置保证了优化航线的覆盖全面性和可靠性,进一步提升优化效果;
37.3、通过将洋面障碍数据和气象数据转化为影响分值,并以航线上的影响分值之和作为分类标准,分类计算简单且分类结果精度高,在降低优化方案计算量的基础上有效提升优化方案的精确度和可靠性。
38.4、通过对指导行驶航线各个航段路线数据进行融合计算,提升了优化后不同航段之间的过渡性,保证航线行驶的平稳。
附图说明
39.图1为本发明的流程图。
具体实施方式
40.如图1所示,本发明包括以下步骤:
41.s1、根据目标位置获取预行驶航线;
42.s2、获取预报天气参数并对预行驶航线进行修订,获取指导行驶航线;
43.s3、平台实时采集洋面环境数据;
44.s4、船舶基于指导行驶航线行驶并对指导行驶航线进行标定;具体包括:
45.s401:船舶采用惯性导航设备按照指导行驶航线行驶,并以t为周期从平台获取海洋的环境数据。
46.s402:根据获取的海洋环境数据生成多个优化方案。
47.s403:选取优化方案并对指导行驶航线进行实时修订。
48.s404:重复步骤s401至步骤s403,直至船舶到达终点。
49.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。
50.本发明公开了一种基于惯性导航设备的航路优化方法,包括以下步骤:
51.s1、根据目标位置获取预行驶航线。
52.先在北斗卫星系统或gps系统等导航系统上设定目标位置坐标,根据历史航线自动获取预行驶航线。
53.s2、获取预报天气参数并对预行驶航线进行修订,获取指导行驶航线。
54.获取对于预行驶航线所在区域的预报天气参数,并根据天气参数对可能出现的洋流等洋面灾害进行预判,对预行驶航线进行初步优化,获取航行的基础线路
‑
指导行驶航线。
55.s3、平台实时采集洋面环境数据。
56.具体包括:
57.s301:将指导行驶航线所在区域划分为多个连续航段。
58.s302:对航段x
i
中指导行驶航线所在区域及其临近区域设置多个测样点。
59.s303:采集测样点a
ij
的实时洋面障碍数据和气象数据。洋面障碍数据包括海水深度、暗礁坐标、暗礁尺寸、其他船只坐标等,气象数据包括风力、降水、潮汐状态等。
60.s4、船舶基于指导行驶航线行驶并对指导行驶航线进行标定。
61.具体包括:
62.s401:船舶采用惯性导航设备按照指导行驶航线行驶,并以t为周期从平台获取海洋的环境数据。
63.在船舶采用惯性导航设备行驶过程中,为了保持航线监测数值的准确性,需要对惯性导航设备测量值进行标定,具体过程为:
64.1.1:为航线行驶过程设定多个优化点并在优化点获取惯性导航设备测量值;
65.1.2:根据陀螺常值漂移量构建粒子数据集合,在陀螺常值漂移的变化范围内随机初始化粒子数据;所述粒子数据包括速度数据和位置数据;
66.1.3:迭代计算每个粒子的速度数据和位置数据,获取最优粒子数据;
67.1.4:使用当前群体的最优粒子数据获取待标定惯性导航的陀螺常值漂移量;
68.1.5:从待标定惯性导航设备的脱落测量值中扣除步骤1.4所得陀螺常值漂移量,获取标定后的惯性导航测量值。
69.s402:根据获取的海洋环境数据生成多个优化方案。
70.根据获取的海洋环境数据生成多个优化方案具体包括:
71.s2.1:将洋面障碍数据和气象数据分别转化为影响分值;
72.s2.2:设定多条待选路线并计算每条待选路线上测样点的影响分值之和;
73.s2.3:根据计算结果对多条待选路线进行分类;
74.s2.4:将分类结果及对应的待选路线坐标信息打包,生成多个优化方案。
75.s403:选取优化方案并对指导行驶航线进行实时修订。具体包括:
76.s3.1:根据驾驶习惯由控制系统自动选择优化方案或由驾驶人员自主选择优化方案;
77.s3.2:将优化方案待选路线各航段的影响分值与指导行驶航线中对应航段的影响分值进行比较;
78.s3.3:根据比较结果对指导行驶航线各个航段路线数据进行融合计算;
79.s3.4:根据融合计算结果对指导行驶航线进行优化更新。
80.s404:重复步骤s401至步骤s403,直至船舶到达终点。
81.本发明能够在船舶行驶过程中根据实时洋面环境数据进行航段的微调整,在保证行驶的基础航线稳定的情况提高航线精确度和安全性,同时航线修订幅度小,保证航线的平稳性和可靠性,进一步提升航行安全。
82.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

