1.本发明涉及绝对距离激光测量技术领域,是一种基于粗精测尺差频调制与解调的协作式相位激光测距装置及其测距方法。
背景技术:
2.激光测距技术以其高测量精度、强抗干扰能力、高时空及垂直分辨率等优点,被广泛应用于大型装备制造、航天器深空导航、交会对接以及分布式编队卫星等领域,已成为航空航天、重大科学装置与国民经济发展研究中不可或缺的关键技术。随着科学技术的发展,尤其航空航天技术的突飞猛进,对测量技术的测量范围、测量精度、稳定性提出了更高的性能要求。近年来,针对空间物理探测研究任务,采用编队小卫星对空间中复杂的物理过程进行协同探测成为研究热点,如美国nasa的grace
‑
fo卫星、nmp st
‑
5计划、欧空局的proba
‑
3卫星、德国的gemini卫星等编队卫星中小卫星之间的间距从几百米到几十千米,且对其距离的测量精度要求达到毫米、亚毫米甚至数十微米量级。而在空间引力波探测研究中,星间轨道游离引起的最大臂长差分别达到了30万千米,且为能正确捕捉引力波信号,臂长的绝对距离测量精度需达到30cm。大型构件加工和整体装配也对测距技术提出了更高的要求,以大型与超大型单体射电望远镜为例,为保证对天体和星际分子的探测灵敏度和成像精度,要对长达几百米到上千米反射面口径进行实时测量和整体控制,每个反射面的测量精度要求优于数毫米甚至数百微米。可见,随着人们对空间探索范围的加大和对探测精度要求的提高,未来将迫切要求测距技术同时兼顾超长作用距离、精密测量准确度和高实时性,实现在几百米至几十万千米范围内对目标进行亚毫米甚至微米级的精确测量。
3.然而,目前采用的超精密测量方法如激光干涉测距,以及超长距离测量方法如差分gps测距、伪随机码调制测距、脉冲激光测距、可见光视觉测量技术、电光调制光频梳绝对测距等,都在原理或技术上限制了其性能的进一步提高。例如,专利[基于高速伪随机码调制和光子计数的远程激光测距系统,公开号:cn102928832a]提出的伪随机码调制测距法与脉冲激光测距法相似,都是基于脉冲时间的测量方法,受限于原理误差和器件噪声的影响,其厘米级的测量精度已接近技术极限。专利[基于飞秒光频梳的正弦相位调制干涉绝对测距装置与方法,公开号:cn108120378a]提出的光频梳绝对测距方法测量精度较高,但其受限于相干长度,难以用于几百千米到几十万千米的测量距离。
[0004]
专利[多频同步调制的大量程高精度快速激光测距方法与装置,公开号:cn1825138a]提出的多波长调制相位激光测距方法与装置利用测量端发射的调制光波和被测目标反射回的调制光波之间的相位差来测量两者之间的绝对距离。由于相位差只能介于0~2π,因此测量长度不能超过波长的二分之一,为保证测距精度与测量范围,采用调制方法产生由粗到精的多个测尺波长进行逐级测量,逐级优化,较长的测尺用于满足测量范围,而较短的测尺用于实现测量精度,其余测尺作为过渡测尺用于衔接粗、精测尺;理论上可以实现在几百米至几十万千米范围内对目标进行亚毫米甚至微米级的精确测量。然而在远距
离的多波长调制相位激光测距中,其测量光将在测量端和目标端之间往返传输,由于光束传播过程中的发散作用,其回光功率将以被测距离的四次方函数而急剧衰减,测量信号信噪比低,成为限制相位激光测距进行远距离测量的重要因素。受探测器件的性能、被测对象载荷和激光安全问题等的限制,难以通过提高激光功率和增加合作目标口径等方法来增加系统回光能量。
[0005]
专利[有源协作式相位激光测距方法与装置,公开号:cn101349757a]提出了一种基于电流调制的内调制有源测距协作端,通过在测距协作端探测测量光信号并进行放大,将其调制到协作端的激光器上,照射回测量端,实现有源协作目标端装置与测量端装置协同工作共同完成距离测量,使得测量系统回光能量的衰减形式由被测距离的四次方衰减函数变为二次方衰减函数,增大系统回光能量及信噪比,在远距离测量中效果显著。但针对在数百千米以上测量范围内实现微米级精度的测距需求,其粗测尺波长要大于200km,对应的粗测尺频率要低于1.5khz,而在鉴相精度为0.08
°
的情况下,要达到1μm的测量精度,所需合成精测尺波长为9mm,对应的测尺频率为33.3ghz,因此对激光的调制带宽至少要覆盖1.5khz至33.3ghz。该专利测距方法中采用的电流调制受限于激光器激射作用以及电路参数,其调制带宽较窄,可产生的精测尺频率不足,且需要的偏置电流大,工作温度高,输出光功率不稳定,影响精测结果的准确度和稳定度。因此该方法难以兼顾大范围、高精度的绝对距离测量需求。
[0006]
专利[一种激光相位法测距装置,公开号:cn202351429u]采用了电光调制器件产生频率在1ghz以上的测尺信号,但高带宽电光调制器(10g以上)由于受到射频线阻抗、射频joule效应等影响,改变了电极与波导的物理性质,低频调制效果不佳,无法在保证精度的情况下同时用于1mhz以下的低频信号调制。因此现今使用的调制方式无法满足数十hz到数十ghz超宽调制范围,导致协作式相位激光测距方法在进行超长距离范围内的微米级高精度测量时受到了限制,需要进一步研究高带宽的激光调制方法即测尺产生方式,尤其是克服低频信号调制不理想特性,扩展测量范围。
[0007]
其次,协作式相位激光测距技术需要光电探测器件将粗、精测尺转换为电信号进行后续的信号处理和鉴相,但现有的光电探测器件对高达数十ghz甚至上百ghz的测尺信号探测效果不佳甚至无法直接探测。专利[超外差与外差结合式抗光学混叠激光测距装置与方法,公开号:cn104049248a]采用了外差和超外差相结合的光电探测方法,通过探测超外差信号获取精测相位结果,避免了对高达数十至数百ghz精测尺信号的直接探测。然而,由于测量光和参考光的光程不同,当其光程差大于相干长度时,干涉信噪比下降,难以进行相位提取。因此该方法受到相干长度的限制,在保证高精度测量的同时,其测量范围被限制在数千米量级难以进一步提高。
[0008]
为打破远距离往返的测量激光回光能量急剧衰减对相位激光测距技术的限制,并使其能够兼顾大范围、高精度的测量需求,对协作式相位激光测距装置及测量方法进行改进,使其满足数十万千米的测量范围要求,并同时达到亚毫米甚至微米级的测量精度。
技术实现要素:
[0009]
本发明为解决超长距离往返探测回光能量急剧衰减的问题,避免测量信号信噪比弱造成的测距精度低甚至难以完成测距。兼顾大范围、高精度的测量需求,使相位激光测距
技术实现在数十万千米的测量范围中达到亚毫米甚至微米级的精确测量,能够满足未来大型装备制造、航天器深空导航、交会对接以及分布式编队卫星等领域的需求。,本发明提供了一种基于粗精测尺差频调制与解调的协作式相位激光测距装置及其测距方法,本发明提供了以下技术方案:
[0010]
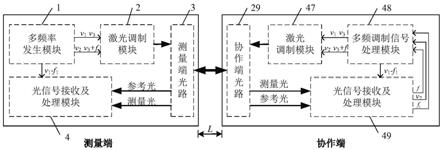
一种基于粗精测尺差频调制与解调的协作式相位激光测距装置,所述装置包括:测量端和协作端,测量端包括多频率发生模块、激光调制模块、测量端光路和光信号接收及处理模块,多频率发生模块产生三路输出,其中两路输入到激光调制模块对激光进行调制,另一路输入到光信号处理与接收模块,激光调制模块的输出光输入到测量端光路,测量端光路的两路输出光分别为测量光和参考光信号输入到测量端光信号接收及处理模块进行测相。
[0011]
优选地,所述多频率发生模块包括一号晶振、二号晶振、三号晶振、一号锁相倍频电路、二号锁相倍频电路、三号锁相倍频电路、四号锁相倍频电路、一号至五号放大电路、一号功率合成器和二号功率合成器;
[0012]
一号晶振的输出端连接到一号锁相倍频电路的输入端,经过一号放大电路;一号晶振的输出信号连接到二号锁相倍频电路的输入端,并经过二号放大电路,二号晶振的输出端连接到三号放大电路的输入端,三号晶振的输出信号连接到三号锁相倍频电路的输入端,并经过四号放大电路;三号晶振的输出信号连接到四号锁相倍频电路的输入端,并经过五号放大电路;一号放大电路的输出端和五号放大电路的输出端分别输入到一号功率合成器的两个输入端,一号功率合成器的输出端连接到一号电光调制器的输入端作为驱动信号,二号功率合成器的输出端连接到二号电光调制器的输入端作为驱动信号,二号放大电路(14)的输出端连接到三号电光调制器和四号电光调制器的输入端作为驱动信号。
[0013]
优选地,激光调制模块包括激光器、一号电光调制器、二号电光调制器、一号双路分光光纤和二号双路分光光纤;激光器的输出连接到一号双路分路光纤被分成两路,一号双路分路光纤的一路输出端连接到一号电光调制器的输入端,另一路输出端连接到二号电光调制器的输入端,一号电光调制器和二号光电调制器的输出端分别连接到二号双路分路光纤的两个输入端,二号双路分路光纤的输出端连接到测量光路的输入端。
[0014]
优选地,所述测量光路包括一号准直器、二号准直器、三号准直器、分光镜和扩束镜组;二号双路分路光纤的输出端连接到一号准直器的输入端,一号准直器的输出端连接到分光镜,分光镜的一路输出作为参考光连接到二号准直器的输入端,二号准直器的输出端连接到光信号接收及处理模块的一个输入端,分光镜的另一路输出连接到扩束镜组的输入端,扩束镜组的输出端连接到协作端光路的输入,协作端光路的输出经过扩束镜组连接到分光镜的输入端,分光镜的输出端连接到三号准直镜的输入端作为测量光,三号准直镜的输出端到光信号接收及处理模块的另一个输入端。
[0015]
优选地,所述光信号接收及处理模块包括由三号双路分光光纤、四号双路分光光纤、三号电光调制器、四号电光调制器、一号至四号光电探测器、六号至九号放大电路、一号至四号滤波电路和高精度测相板卡;测量光路的一个输出端作为参考光与三号双路分光光纤的输入端连接后并被分成两路,三号双路分光光纤的一个输出端连接到三号电光调制器的输入端,三号电光调制器的输入端连接到一号光电探测器的输入端,一号光电探测器的输出端、六号放大电路和一号滤波电路依次连接,一号滤波电路的输出端连接到高精度测
相板卡,三号双路分光光纤的另一个输出端连接到二号光电探测器的输入端后,依次经过七号放大电路和二号滤波电路后连接到高精度测相板卡;
[0016]
测量光路的另一个输出端作为测量光与四号双路分路光纤的输入端连接并被分成两路,四号双路分路光纤的其中一路输出端连接到四号电光调制器的输入端,四号电光调制器的输出端、三号光电探测器、八号放大电路和三号滤波电路依次连接,三号滤波电路的输出端连接到高精度测相板卡;四号双路分路光纤的另一路输出端连接到四号光电探测器的输入端,并依次经过九号放大电路和四号滤波电路连接到高精度测相板卡。
[0017]
优选地,协作端位于被测目标处,协作端包括协作端光路、协作端激光调制模块、多频调制信号处理模块、协作端光信号接收及处理模块;协作端光路接收来自测量端的测量信号,协作端激光主动调制模块的输出连接到协作端光路的输入,协作端光路的两路输出连接到协作端光信号接收及处理模块,协作端光信号接收及处理模块产生三路输出并连接到多频调制信号处理模块作为输入,多频调制信号处理模块产生三路输出,其中两路输入到协作端激光调制模块,另一路输入到协作端光信号接收及处理模块。
[0018]
一种基于粗精测尺差频调制与解调的协作式相位激光测距方法,包括以下步骤:
[0019]
步骤1:测量端的多频率发生模块产生频率为v1、v1‑
f1、v2、v3和v3 f正弦信号,通过电光强度调制的方法对激光器输出的一束激光进行强度调制,产生频率为v1、v2、v3和v3 f的光信号,光束被分成两束,一束作为测量光出射到待测目标上,另一束作为测量端的参考信号;其中精测尺频率为v1,次级精测尺频率为v2,粗测尺的频率为f;
[0020]
步骤2:测距协作端位于待测目标处,并产生正弦电信号步骤2:测距协作端位于待测目标处,并产生正弦电信号在协作端接收来自测量端的测量信号,将测量信号分成两部分,一部分光束通过电光强度调制器进行二次调制,精测尺信号在协作端的频率为v1‑
f1的正弦波调制下生成频率为f1的差频信号,其相位带有精测尺v1的测距相位信息,使用光电探测器和滤波器转换与分离出频率为f1的差频电信号通过光电探测器探测另一部分测量光束中v3和v3 f的差频信号f作为粗测尺,差频信号f的相位为粗测结果,使用光电探测器和滤波器转换和分离出次级精测尺v2和粗测尺f的电信号分别为
[0021]
步骤3:将提取到的带有相位信息的电信号作为调制信号对协作端的激光器输出光进行强度调制;将带有精测尺测距相位信息的电信号与协作端的频率为v1‑
f1的信号混频,还原带有精测相位信息的精测尺v1;将粗测尺与协作端产生的频率为v3的电信号混频,得到频率为v3 f的电信号;将上述产生的频率为v1、v2、v3和v3 f的电信号通过强度调制的方式调制协作端输出的激光束;
[0022]
步骤4:协作端的激光经过调制后作为目标端的测量回光,被分成两束,其中一束发射回测量端,另一束作为协作端参考信号,输入到协作端的光信号接收及处理模块进行
协作端附加相位延迟量的测量与补偿;首先通过电光调制器对其进行调制,在协作端频率为v1‑
f1的信号调制下产生频率为f1的差频信号并带有回光中精测尺v1的相位信息,与测量光中处理得到的频率为f1的电信号进行相位差测量,测得的相差为由协作端产生的精测尺相位附加值,随协作端环境参数变化而变化,其对测距精度影响较大,将通过激光通信模块实时发送到测量端,并在测量端进行实时补偿;而粗测尺f和次级精测尺v2在协作端的附加相位值漂移对测距的精度没有影响,附加相位值通过相差校准及补偿单元进行提前标定,并在测量端引入对应测尺的固定补偿相位值
[0023]
步骤5:在测量端接收测量回光,对测量端的参考信号和测量回光信号中的部分光分别通过电光强度二次调制的方法进行解调,在测量端的频率为v1‑
f1的电信号调制下,产生频率为f1的差频信号并带有精测尺v1的相位信息,通过光电探测器将其转换为电信号;使用光电探测器将测量端的参考信号和测量回光信号中的另一部分光转换为电信号,使用滤波器分离得到其中频率为v2和f的电信号,其中f为粗测尺的频率,为参考光信号和测量回光中频率为v3和v3 f的光信号的差频信号,其相位为粗测尺测距结果;分别测量频率为f1、v2、f的参考电信号和测量回光的电信号之间的相位差为得到多测尺的测距结果为
[0024]
步骤6、高精度测相板卡的数据合成单元对三个相位差值进行合成生成距离值,粗测尺频率为f,波长为λ,通过下式表示粗测尺的距离测量值:
[0025][0026]
频率为v2的信号为次级粗测尺,波长为λ2,次级粗测尺的距离测量值通过下式表示:
[0027][0028]
频率为v1的信号为精测尺,波长为λ1,被测距离通过下式表示:
[0029][0030]
其中,floor()函数为取整函数。
[0031]
本发明具有以下有益效果:
[0032]
本发明的测距协作端能够解决远距离测量应用中光能量急剧衰减、信号信噪比弱导致的测距精度较低甚至无法完成测距的问题,协作端探测测量信号并分别对其进行滤波放大后,再通过电光强度调制方法将其同步调制到协作端的激光器上作为测量回光,在保证相位不变的情况下实现对测量光信号的放大,增大了测量回光能量及信噪比,使测量回光能量由被测距离的四次方衰减变为二次方衰减。
[0033]
与现有的有源协作式相位激光测距方法不同,本发明测量端与协作端通过电光强度调制方法对激发器进行外调制,该调制方式的带宽大,可以同步调制产生范围在几十mhz到几十ghz的粗精测尺,产生的精测尺频率较高,其可达到的理论精度也越高;同时协作端采用差频调制的方法复现粗测尺信号f。即协作端探测粗测尺信号并通过混频产生两路频差为f,相位差为粗测结果的高频信号对协作端激光器进行差频调制,使粗测尺频率可以低至几十khz甚至几十hz。该方法与装置避免了调制带宽对粗精测尺频率的限制,在不增大激光出射功率的情况下,使协作式相位激光测距技术兼顾远距离和高精度的测量需求,这是本发明区别现有装置的创新点之一。
[0034]
受现有的探测器件带宽的限制,难以对几十ghz的精测尺信号进行直接探测或探测效果不佳,限制了精测尺信号频率的提高,在原理上也限制了协作式相位激光测距技术精度的进一步提高。本发明中协作端采用差频调制的方法解调精测尺,即获取了精测相位信息,又避免了对高频信号的探测,使精测尺频率的提高不受测器带宽的限制。同时与直接探测测量信号相比,差频调制的方法探测到的电信号信噪比有所提高,再将其经过处理后调制到协作端激光器上产生的回光信噪比也将有所提高,使带有协作端的相位激光测距技术具有更高的精度。本发明打破了探测器带宽对相位式激光测距技术精度的限制,使协作式相位激光测距可以满足兼顾大范围和高精度的测量需求。这是本发明区别现有装置的创新点之二
附图说明
[0035]
图1为本发明的高精度多频同步协作式测距装置的总体结构示意图;
[0036]
图2为协作式测距装置中测量端的结构示意图;
[0037]
图3为协作式测距装置中协作端的结构示意图。
[0038]
1为多频率发生模块、2为激光调制模块、3为测量光路、4为光信号接收及处理模块、5为一号晶振、6为二号晶振、7为三号晶振、8为一号锁相倍频电路、9为二号锁相倍频电路、10为三号锁相倍频电路、11为四号锁相倍频电路、12为一号放大电路、13为二号放大电路、14为三号放大电路、15为四号放大电路、16为五号放大电路、17为一号功率合成器、18为二号功率合成器、19为激光器、20为一号双路分光光纤、21为一号电光调制器、22为二号电光调制器、23为二号双路分光光纤、24为一号准直器、25为二号准直器、26为三号准直器、27为分光镜、28为扩束镜组、29为协作端光路、30为三号双路分光光纤、31为四号双路分光光纤、32为三号电光调制器、33为四号电光调制器、34为一号光电探测器、35为二号光电探测器、36为三号光电探测器、37为四号光电探测器、38为六号放大电路、39为七号放大电路、40为八号放大电路、41为九号放大电路、42为一号滤波电路、43为二号滤波电路、44为三号滤波电路、45为四号滤波电路、46为高精度测相板卡、47为协作端激光调制模块、48为多频调制信号处理模块、49为协作端光信号接收及处理模块、50为协作端扩束镜镜组,51为准直器a、52为准直器b、53为准直器c、54为协作端分光镜、55为双路分路光纤a、56为双路分路光纤b、57为双路分路光纤c、58为电光调制器a、59为电光调制器b、60为光电探测器a、61为光电探测器b、62为光电探测器c、63为光电探测器d、64为放大电路a、65为放大电路b、66为放大电路c、67为放大电路d、68为滤波电路a、69为滤波电路b、70为滤波电路c、71为滤波电路d、72为相差测量单元、73为激光通信单元、74为相差校准及补偿单元、75为晶振a、76为晶振b、
77为锁相倍频电路a、78为锁相倍频电路b、79为放大电路e、80为放大电路f、81为滤波电路e、82为滤波电路f、83为混频器a、84为混频器b、85为功率合成器a、86为功率合成器b、87为协作端激光器、88为双路分路光纤d、89为电光调制器c、90为电光调制器d。
具体实施方式
[0039]
以下结合具体实施例,对本发明进行了详细说明。
[0040]
具体实施例一:
[0041]
根据图1至图3所示,基于粗精测尺差频调制与解调的协作式相位激光测距方法包含以下步骤:
[0042]
步骤1:测量端的多频率发生模块产生频率为v1、v1‑
f1、v2、v3和v3 f正弦信号,通过电光强度调制的方法对激光器输出的一束激光进行强度调制,产生频率为v1、v2、v3和v3 f的光信号,该光束被分成两束,一束作为测量光出射到待测目标上,另一束作为测量端的参考信号;其中精测尺频率为v1,次级精测尺频率为v2,粗测尺的频率为f;
[0043]
步骤2:测距协作端位于待测目标处,并产生正弦电信号步骤2:测距协作端位于待测目标处,并产生正弦电信号在协作端接收来自测量端的测量信号,将测量信号分成两部分,一部分光束通过电光强度调制器进行二次调制,精测尺信号在协作端的频率为v1‑
f1的正弦波调制下生成频率为f1的差频信号,其相位带有精测尺v1的测距相位信息,使用光电探测器和滤波器转换与分离出频率为f1的差频电信号通过光电探测器探测另一部分测量光束中v3和v3 f的差频信号f作为粗测尺,差频信号f的相位为粗测结果,使用光电探测器和滤波器转换和分离出次级精测尺v2和粗测尺f的电信号分别为
[0044]
步骤3:将上述提取到的带有相位信息的电信号作为调制信号对协作端的激光器输出光进行强度调制;首先将带有精测尺测距相位信息的电信号与协作端的频率为v1‑
f1的信号混频,还原带有精测相位信息的精测尺v1;将粗测尺与协作端产生的频率为v3的电信号混频,得到频率为v3 f的电信号;将上述产生的频率为v1、v2、v3和v3 f的电信号通过强度调制的方式调制协作端输出的激光束;
[0045]
步骤4:协作端的激光经过调制后作为目标端的测量回光,被分成两束,其中一束发射回测量端,另一束作为协作端参考信号,输入到协作端的光信号接收及处理模块进行协作端附加相位延迟量的测量与补偿;首先通过电光调制器对其进行调制,在协作端频率为v1‑
f1的信号调制下产生频率为f1的差频信号并带有回光中精测尺v1的相位信息,与测量光中处理得到的频率为f1的电信号进行相位
差测量,测得的相差为由协作端产生的精测尺相位附加值,随协作端环境参数变化而变化,其对测距精度影响较大,将通过激光通信模块实时发送到测量端,并在测量端进行实时补偿;而粗测尺f和次级精测尺v2在协作端的附加相位值漂移对测距的精度没有影响,其附加相位值通过相差校准及补偿单元进行提前标定,并在测量端引入对应测尺的固定补偿相位值
[0046]
步骤5:在测量端接收测量回光,首先对测量端的参考信号和测量回光信号中的部分光分别通过电光强度二次调制的方法进行解调,在测量端的频率为v1‑
f1的电信号调制下,产生频率为f1的差频信号并带有精测尺v1的相位信息,通过光电探测器将其转换为电信号;使用光电探测器将测量端的参考信号和测量回光信号中的另一部分光转换为电信号,使用滤波器分离得到其中频率为v2和f的电信号,其中f为粗测尺的频率,为参考光信号和测量回光中频率为v3和v3 f的光信号的差频信号,其相位为粗测尺测距结果;分别测量频率为f1、v2、f的参考电信号和测量回光的电信号之间的相位差为得到多测尺的测距结果为
[0047]
步骤6:高精度测相板卡的数据合成单元对三个相位差值进行合成生成距离值,粗测尺频率为f,波长为λ,粗测尺的距离测量值为频率为v2的信号为次级粗测尺,波长为λ2,次级粗测尺的距离测量值为频率为v1的信号为精测尺,波长为λ1,被测距离为其中floor()函数为取整函数。
[0048]
基于粗精测尺差频调制与解调的协作式相位激光测距装置,适用于上述的高精度多测尺同步协作式相位激光测距方法,其包括测量端和协作端;测量端由多频率发生模块1、激光调制模块2、测量端光路3和光信号接收及处理模块4组成,多频率发生模块1产生三路输出,其中两路输入到激光调制模块2对激光进行调制,另一路输入到光信号处理与接收模块4,激光调制模块2的输出光输入到测量端光路3,测量光路3的两路输出光分别为测量光和参考光信号输入到测量端光信号接收及处理模块4进行测相;
[0049]
多频率发生模块1由一号晶振5、二号晶振6、三号晶振7、一号锁相倍频电路8、二号锁相倍频电路9、三号锁相倍频电路10、四号锁相倍频电路11、一号到五号放大电路12~16、一号功率合成器17和二号功率合成器18组成,一号晶振5的输出端连接到一号锁相倍频电路8的输入端,并经过一号放大电路12,一号晶振5的输出信号连接到二号锁相倍频电路9的输入端,并经过二号放大电路13,二号晶振6的输出端连接到三号放大电路14的输入端,三号晶振7的输出信号连接到三号锁相倍频电路10的输入端,并经过四号放大电路15,三号晶振7的输出信号连接到四号锁相倍频电路11的输入端,并经过五号放大电路16;一号放大电路12的输出端和五号放大电路16的输出端分别输入到一号功率合成器17的两个输入端,一号功率合成器17的输出端连接到一号电光调制器21的输入端作为驱动信号,二号功率合成器18的输出端连接到二号电光调制器22的输入端作为驱动信号,二号放大电路14的输出端
连接到三号电光调制器32和四号电光调制器33的输入端作为驱动信号;
[0050]
激光调制模块2由激光器19、一号电光调制器21、二号电光调制器22、一号双路分光光纤20和二号双路分光光纤23组成。激光器19的输出连接到一号双路分路光纤20被分成两路,一号双路分路光纤20的一路输出端连接到一号电光调制器21的输入端,另一路输出端连接到二号电光调制器22的输入端,一号电光调制器21和二号光电调制器22的输出端分别连接到二号双路分路光纤23的两个输入端,二号双路分路光纤23的输出端连接到测量光路3的输入端;
[0051]
测量端光路3由一号准直器24、二号准直器25、三号准直器26、分光镜27以及扩束镜组28组成。二号双路分路光纤23的输出端连接到一号准直器24的输入端,一号准直器24的输出端连接到分光镜27,分光镜27的一路输出作为参考光连接到二号准直器的输入端25,二号准直器25的输出端连接到光信号接收及处理模块4的一个输入端,分光镜27的另一路输出连接到扩束镜组28的输入端,扩束镜组28的输出端连接到协作端光路29的输入,协作端光路29的输出经过扩束镜组28连接到分光镜27的输入端,分光镜27的输出端连接到三号准直镜26的输入端作为测量光,三号准直镜26的输出端到光信号接收及处理模块4的另一个输入端;
[0052]
光信号接收及处理模块4由三号双路分光光纤30、四号双路分光光纤31、三号电光调制器32、四号电光调制器33、一号至四号光电探测器34~37、六号至九号放大电路38~41、一号至四号滤波电路42~45以及高精度测相板卡46组成。测量光路3的一个输出端作为参考光与三号双路分光光纤30的输入端连接后并被分成两路,三号双路分光光纤30的一个输出端连接到三号电光调制器32的输入端,三号电光调制器32的输入端连接到一号光电探测器34的输入端,一号光电探测器34的输出端、六号放大电路38和一号滤波电路42依次连接,一号滤波电路42的输出端连接到高精度测相板卡,三号双路分光光纤30的另一个输出端连接到二号光电探测器35的输入端后,依次经过七号放大电路39和二号滤波电路43后连接到高精度测相板卡;测量光路3的另一个输出端作为测量光与四号双路分路光纤31的输入端连接并被分成两路,四号双路分路光纤31的其中一路输出端连接到四号电光调制器33的输入端,四号电光调制器33的输出端、三号光电探测器36、八号放大电路40和三号滤波电路44依次连接,三号滤波电路44的输出端连接到高精度测相板卡46;四号双路分路光纤31的另一路输出端连接到四号光电探测器37的输入端,并依次经过九号放大电路41和四号滤波电路45连接到高精度测相板卡46;
[0053]
协作端位于被测目标处,由协作端光路29、协作端激光调制模块47、多频调制信号处理模块48、协作端光信号接收及处理模块49组成;协作端光路29接收来自测量端的测量信号,协作端激光主动调制模块49的输出连接到协作端光路29的输入,协作端光路29的两路输出连接到协作端光信号接收及处理模块49,协作端光信号接收及处理模块49产生三路输出并连接到多频调制信号处理模块48作为输入,多频调制信号处理模块48产生三路输出,其中两路输入到协作端激光调制模块47,另一路输入到协作端光信号接收及处理模块49;
[0054]
协作端光路29由协作端扩束镜组50、准直器a51、准直器b52、准直器c53、协作端分光镜54、双路分路光纤a55、双路分路光纤b56、双路分路光纤c57组成;协作端扩束镜组50接收来自测量端的测量光信号,输出与协作端分光镜54连接,对应的分光镜54输出通过准直
器c53与双路分路光纤c57连接,激光调制模块47的输出通过准直器a51和双路分光光纤a55连接到协作端分光镜54,对应分光镜54的两路输出,一路输出到扩束镜组50,通过扩束镜组50发射回测量端,另一路输出通过准直器b52与双路分路光纤b56连接;
[0055]
协作端光信号接收及处理模块49由电光调制器a58、电光调制器b59、光电探测器a~d 60~63、放大电路a~d 64~67、滤波电路a~d 68~71、相差测量单元72、激光通信单元73以及相差校准及补偿单元74;多频调制信号处理模块49的输出连接到电光调制器a58和电光调制器b59的调制信号输入端口,双路分路光纤c57的一路输出依次与光电探测器a60、放大电路a64、滤波电路a68相连接,其输出连接到多频调制信号处理模块48,双路分路光纤c57的另一路输出依次与电光调制器a58、光电探测器b61、放大电路b65、滤波电路b69相连接,其输出连接到多频调制信号处理模块48和相差测量单元72,双路分路光纤b56的一路输出依次与电光调制器b59、光电探测器c62、放大电路c66、滤波电路c70相连接,其输出连接到相差测量单元72,双路分路光纤b56的另一路输出依次与光电探测器d63、放大电路d67、滤波电路d71相连接,其输出都连接到相位校准与补偿单元74;
[0056]
多频调制信号处理模块48由晶振a75、晶振b76、锁相倍频电路a和b 77~78、放大电路e和f 79~80、滤波电路e和f 81~82、混频器a和b 83~84、功率合成器a和b 85~86;晶振a75、锁相倍频电路a77以及放大电路e79依次连接,其输出连接到光信号接收及处理模块49中的电光调制器a58和b59上,协作端光信号处理模块49分别有三路输出,其中由滤波电路b69产生的输出与由晶振a75、锁相倍频电路a77以及放大电路e79依次连接产生的输出共同输入到混频器b84,混频器b84产生的输出与滤波电路f82相接,滤波电路f82的输出作为一路调制信号;由协作端光信号接收及处理模块49的滤波器a68产生两路输出,其中一路输出直接作为一路调制信号,另一路输出与由晶振b76、锁相倍频电路b78以及放大电路f80依次连接产生的输出共同输入到混频器a83,并与滤波电路e81相接,滤波电路e81的输出作为一路调制信号,同时放大电路e79的输出也作为一路调制信号,上述由滤波电路f82和放大电路e79输出的调制信号共同输入到功率合成器a85,由滤波电路a68和滤波电路e81输出的调制信号共同输入到功率合成器b86,功率合成器a和b85~86的输出分别输入到协作端激光调制模块47;
[0057]
协作端激光调制模块47由激光器87、双路分路光纤d88、电光调制器c89、电光调制器d90组成;激光器87的输出与双路分路光纤d88相连接被分成两路,其中一路输出与电光调制器c89相接,另一路输出与电光调制器d90相接,多频调制信号处理模块48中功率合成器a和b 85~86的输出分别与电光调制器c、d 89~90的调制信号输入端口相接,电光调制器c、d 89~90的输出分别与双路分路光纤a55的两个输入端口连接,双路分路光纤a55的输出连接到协作端光路29。
[0058]
以上所述仅是一种基于粗精测尺差频调制与解调的协作式相位激光测距装置及其测距方法的优选实施方式,一种基于粗精测尺差频调制与解调的协作式相位激光测距装置及其测距方法的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。