1.本发明涉及四轮驱动力分配装置。
背景技术:
2.对于车辆所使用的轮胎、即车轮而言,若车轮的接地载荷变大,则对地面的抓地(grip)力变大,若车轮的接地载荷变小,则对地面的抓地力变小。在对地面的抓地力变小时,若对车轮赋予大的驱动力,则车轮会打滑,无法恰当地转向操纵车辆。另一方面,若车辆转弯,则从转弯中心观察位于内侧的内轮的接地载荷变得小于从转弯中心观察位于外侧的外轮的接地载荷,此时,若对接地载荷变小的内轮赋予大的驱动力,则内轮打滑,无法恰当地转向操纵车辆。鉴于此,在二轮驱动车中,公知有一种在车辆转弯时使内轮(驱动轮)的驱动力小于外轮(驱动轮)的驱动力的二轮驱动力分配装置(例如参照专利文献1)。
3.专利文献1:日本特开2001
‑
063397号公报
4.另外,即便是四轮驱动车,在车辆转弯时,内轮的接地载荷也小于外轮的接地载荷,同时,前内轮的接地载荷小于后内轮的接地载荷。然而,在对于一对前轮应用上述的二轮驱动力分配装置的同时对于一对后轮也应用上述的二轮驱动力分配装置的情况下,当车辆转弯时,不管前内轮的接地载荷小于后内轮的接地载荷,都对前内轮与后内轮施加相同的驱动力。其结果是,存在接地载荷小的前内轮打滑而成为转向不足状态的担忧。
技术实现要素:
5.根据本发明,提供一种四轮驱动力分配装置,向四轮驱动车辆的各车轮分配驱动力,在车辆的转弯时,基于前内轮的接地载荷与后内轮的接地载荷来调整向前内轮的驱动力分配量与向后内轮的驱动力分配量,转弯中的前内轮的接地载荷相对于后内轮的接地载荷的比例越小,则使向前内轮的驱动力分配量越小于向后内轮的驱动力分配量。
6.能够在确保车辆的恰当的转向操纵作用的同时提高车辆的驾驶性能。
附图说明
7.图1是以图解的方式表示了车辆的四轮驱动力分配装置的整体图。
8.图2是表示前轮驱动转矩与后轮驱动转矩的关系的图。
9.图3是以图解的方式表示了车辆的四轮驱动力分配装置的其他例子的整体图。
10.图4是表示摩擦圆的图。
11.图5a、图5b以及图5c是用于对车辆的举动进行说明的图。
12.图6a以及图6b是用于对车轮的接地载荷的变化进行说明的图。
13.图7a以及图7b是表示各车轮的摩擦圆的大小的图。
14.图8a以及图8b是表示各车轮的摩擦圆的大小的图。
15.图9a以及图9b是用于对车轮的接地载荷变化量进行说明的图。
16.图10是用于对车辆转弯时的前内轮的接地载荷与后内轮的接地载荷的比率的计
算方法进行说明的图。
17.图11是表示前后加速度g
x
与横向加速度gy的关系的线图。
18.图12是表示在第2实施例中使用的电子控制单元等的图。
19.图13a以及图13b分别是表示内燃机转速、加速器开度、内燃机输出转矩的关系的图以及用于对横向加速度gy的计算方法进行说明的图。
20.图14是表示各车轮的摩擦圆的大小的图。
21.图15是用于对车辆转弯时的前内轮的接地载荷与后内轮的接地载荷的比率的计算方法等进行说明的图。
22.图16是表示前后加速度g
x
与横向加速度gy的关系的线图。
23.图17是用于进行驾驶控制的流程图。
具体实施方式
24.首先,参照图1对车辆的四轮驱动力分配装置进行说明。其中,该四轮驱动力分配装置是一个例子,可使用能够任意地向前后轮分配驱动力的各种公知的四轮驱动力分配装置来代替图1所示的四轮驱动力分配装置。参照图1,车辆整体用附图标记1表示。其中,在图1中,2a以及2b表示一对前轮,3a以及3b表示一对后轮,4表示内燃机,5表示驱动转矩分配器。从驱动转矩分配器5向前方延伸有前驱动轴6,向后方延伸有后驱动轴7。前驱动轴6经由前差速器8以及对应的车轴9与各前轮2a、2b连结,后驱动轴7经由后差速器10以及对应的车轴11与各后轮3a、3b连结。
25.驱动转矩分配器5由行星齿轮机构构成,具备被固定于内燃机1的输出轴12的第1太阳轮13、被固定于后驱动轴7的第2太阳轮14以及被支承为能够绕内燃机1的输出轴12以及后驱动轴7旋转的行星架15。该行星架15将与第1太阳轮13以及第2太阳轮14分别啮合且一体地旋转的第1行星齿轮16以及第2行星齿轮17支承为能够旋转,并且在行星架15的一端形成有与被固定于前驱动轴6的齿轮18啮合且能够绕内燃机1的输出轴12旋转的齿轮19,在行星架15的另一端形成有能够调整被固定于后驱动轴7的离合器板20与行星架15间的结合状态的液压离合器机构21。该液压离合器机构21由液压控制装置22控制。
26.另一方面,如图1所示,在各前轮2a、2b以及各后轮3a、3b分别安装有液压式制动装置30,各液压式制动装置30经由用虚线所示的对应的制动器油管31与制动控制装置32连结。该制动控制装置32具备:主缸,通过制动踏板的踏入操作来产生制动液压;和制动液压调整装置,能够调整所产生的制动液压来针对前轮2a、2b以及后轮3a、3b的各制动装置30的每一个产生不同的制动液压。即,通过制动控制装置32能够分别独立地控制各前轮2a、2b以及各后轮3a、3b的制动力。
27.另外,图1中表示了被搭载于车辆1的电子控制单元40。该电子控制单元40由数字计算机构成,具备由双向性总线41相互连接的rom(只读存储器)42、ram(随机访问存储器)43、cpu(微处理器)44、输入端口45以及输出端口46。如图1所示,在车辆1搭载有检测车辆1的前后方向的加速度的前后加速度传感器(以下,称为前后g传感器)50、检测车辆1的横向的加速度的横向加速度传感器(以下,称为横向g传感器)51、检测转向角的转向角传感器52、以及检测车速的车速传感器53,这些前后g传感器50、横向g传感器51、转向角传感器52以及车速传感器53的输出信号经由对应的ad变换器47被输入至输入端口45。另一方面,输
出端口46经由对应的驱动电路48与液压控制装置22以及制动控制装置32连接。
28.在图1中,内燃机1的输出转矩在驱动转矩分配器5中被分配为前轮2a、2b驱动用的前驱动轴6的驱动转矩和后轮3a、3b驱动用的后驱动轴7的驱动转矩,该驱动转矩的分配控制通过由液压控制装置22控制液压离合器机构21的离合器工作液压来进行。图2表示了向前驱动轴6分配的前轮驱动转矩的分配量、向后驱动轴7分配的后轮驱动转矩的分配量、以及液压离合器机构21的离合器工作液压的关系。在图1所示的驱动转矩分配器5中,若液压离合器机构21的离合器工作液压降低而离合器成为分离状态,则对于内燃机1的输出转矩而言,一方面,经由第1太阳轮13、第1行星齿轮16以及行星架15传递至前驱动轴6,另一方面,经由第1太阳轮13、第1行星齿轮16、第2行星齿轮17以及第2太阳轮14传递至后驱动轴7。此时,向前驱动轴6与后驱动轴7的驱动转矩的分配量成为与第1太阳轮13、第2太阳轮14、第1行星齿轮16以及第2行星齿轮17的齿数对应的一定值,在图1所示的驱动转矩分配器5中,此时如图中用p点所示,向前驱动轴6分配的前轮驱动转矩的分配量成为0.6,向后驱动轴7分配的后轮驱动转矩的分配量成为0.4。
29.另一方面,若液压离合器机构21的离合器工作液压上升而离合器成为结合状态,则对于内燃机1的输出转矩而言,一方面,经由第1太阳轮13、第1行星齿轮16以及行星架15传递至前驱动轴6,另一方面,经由第1太阳轮13、第1行星齿轮16以及行星架15传递至后驱动轴7。在图1所示的驱动转矩分配器5中,此时如图中用q点所示,构成为向前驱动轴6分配的前轮驱动转矩的分配量成为0.2,向后驱动轴7分配的后轮驱动转矩的分配量成为0.8。因此,通过控制液压离合器机构21的离合器工作液压,能够在图2的p与q的范围内任意地调整前轮驱动转矩的分配量与后轮驱动转矩的分配量。
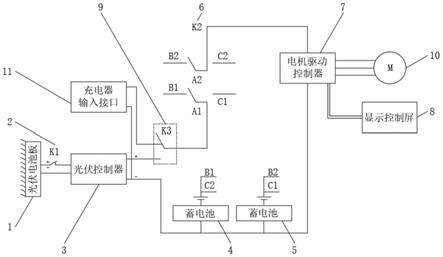
30.图3表示了车辆的四轮驱动力分配装置的其他例子。在该例子中,前轮2a、2b以及后轮3a、3b分别被独立的电动马达60驱动。在车辆1搭载有用于控制各电动马达60的马达驱动控制装置61,利用该马达驱动控制装置61将各电动马达60的输出转矩控制为分别独立的各个输出转矩。
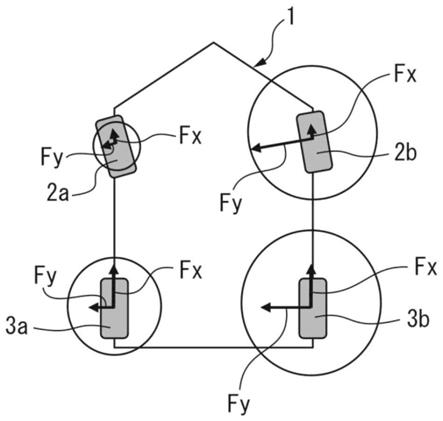
31.接下来,参照图4对作用于轮胎的接地面的力以及轮胎的摩擦圆简单地进行说明。其中,在图4中,后缀x表示车辆的前后方向,后缀y表示车辆的横向。这样,若为了加速车辆而对轮胎施加驱动转矩、即对车辆施加前后加速度g
x
,则对轮胎的接地面作用有车辆前后方向的力、即前后力fx。该前后力fx与施加于轮胎的驱动转矩成比例。另一方面,若使车辆转弯,则在车辆产生离心力、即横向加速度gy,对车辆作用有横向的力。若对车辆施加横向的力,则在各轮胎的接地面分别产生与该横向的力相反朝向的横向力fy,该情况下,简而言之,在各轮胎的接地面产生与各轮胎的接地载荷大致成比例的横向力fy。因此,在各轮胎的接地面产生前后力fx与横向力fy的合力fxy。
32.另一方面,若将轮胎的接地载荷设为fz,将轮胎与路面间的摩擦系数设为μ,则以fz
·
μ为半径的圆被称为摩擦圆,在图4中示出了该摩擦圆。该摩擦圆的半径fz
·
μ表示轮胎的接地面克服摩擦力而开始打滑时的作用于轮胎的接地面的力的极限值,若前后力fx与横向力fy的合力fxy超过摩擦圆、即超过极限,则轮胎克服轮胎与路面间的摩擦力而开始打滑。因此,该摩擦圆的大小表示了相对于轮胎的抓地力的强度。其中,该摩擦圆的大小与轮胎的接地载荷成比例,因此,轮胎的接地载荷越大,则相对于轮胎的抓地力越强。在车辆中,不能使轮胎的接地面产生超过摩擦圆那样的、即超过极限那样的合力fxy,通常以在轮胎的
接地面产生的合力fxy不超过摩擦圆的方式进行车辆的驾驶。
33.接下来,参照图5a~图5c,使用使前轮2a、2b彼此以及后轮3a、3b彼此分别接近的2轮模型来对在轮胎的接地面产生的横向力fy超过摩擦圆的情况、即在轮胎的接地面产生的横向力fy超过极限的情况下产生的车辆的举动简要地进行说明。其中,在图5a~图5c中,实线的箭头c表示目标行驶线,虚线的箭头d表示实际的行驶线。此外,箭头fy表示车辆转弯时在前轮2a、2b以及后轮3a、3b的接地面产生的横向力。图5a表示虽然产生横向力fy但横向力fy未超过摩擦圆的情况、即横向力fy未超过极限的情况。该情况下,实际的行驶线d与目标行驶线c重叠。
34.另一方面,图5b表示在前轮2a、2b以及后轮3a、3b的接地面产生的横向力fy变大且在前轮2a、2b的接地面产生的横向力fy先超过摩擦圆、即极限的情况。该情况下,在车辆产生横摆力矩m,实际的行驶线d比目标行驶线c向外侧鼓起。这样的状态被称为转向不足(或侧滑(ploughing))。另一方面,图5c表示了在前轮2a、2b以及后轮3a、3b的接地面产生的横向力fy变大且在后轮3a、3b的接地面产生的横向力fy先超过摩擦圆、即极限的情况。该情况下,在车辆产生与图5b反向的横摆力矩m,车辆打转而实际的行驶线d比目标行驶线c朝向内侧。这样的状态被称为转向过度。其中,若车辆打转,则极其危险。因此,通常车辆被设计为在产生大的横向力fy时先发生转向不足(或侧滑),在本发明涉及的实施例中,也被设计为在产生大的横向力fy时先产生转向不足(或侧滑)。
35.另外,如上所述,若对轮胎施加驱动转矩,则在轮胎的接地面产生前后力fx,会在车辆产生前后加速度g
x
。该情况下,越能够增大在轮胎的接地面产生的前后力fx,则越能够提高前后加速度g
x
、即越能够提高车辆的加速性能。另一方面,若使车辆转弯,则在车辆产生横向加速度gy,在轮胎的接地面产生横向力fy。该情况下,越能够增大在轮胎的接地面产生的横向力fy,则越能够提高横向加速度gy、即越能够提高车辆的转弯性能。因此,在前后力fx与横向力fy的合力fxy不超过摩擦圆的范围内,越能够增大在轮胎的接地面产生的前后力fx以及横向力fy,则越能够提高车辆的加速性能以及转弯性能。
36.接下来,参照图6a~图8b对此进行说明。其中,图6a是从横向观察车辆1时的图,图6b是从前方观察车辆1时的图,图7a~图8b是从上方观察车辆1时的图。另外,在图6a以及图6b中,g
x
表示在加速驾驶时沿车辆的前后方向施加的加速度(以下,称为前后加速度g
x
),gy表示在车辆转弯时沿车辆1的横向施加的加速度(以下,称为横向加速度gy)。首先,参照图7a,该图7a表示了定速直行驾驶车辆1时的相对于前轮2a、2b以及后轮3a、3b的摩擦圆。其中,从图7a可知,图7a~图8b表示车辆停止时的前轮2a、2b以及后轮3a、3b的接地载荷大致相等的情况。
37.另一方面,若对前轮2a、2b以及后轮3a、3b施加驱动转矩来加速车辆1,则在车辆1产生图6a所示那样的力矩ma,其结果是,前轮2a、2b的接地载荷变得小于后轮3a、3b的接地载荷。因此,此时如图7b所示,相对于前轮2a、2b的摩擦圆的直径变得小于相对于后轮3a、3b的摩擦圆的直径。此时,若如图7b所示以在各前轮2a、2b以及各后轮3a、3b的接地面产生的前后力fx成为极限的方式调整施加于前轮2a、2b以及后轮3a、3b的驱动转矩,则能够确保最优的加速性能。
38.另一方面,图8a表示了车辆1在定速驾驶的状态下左转弯的情况。其中,以下将此时相对于转弯中心位于内侧的前轮2a以及后轮3a称为前内轮2a以及后内轮3a,以下将相对
于转弯中心位于外侧的前轮2b以及后轮3b称为前外轮2b以及后外轮3b。若使车辆1左转弯,则对车辆1施加横向加速度gy,在车辆1产生图6b所示那样的力矩mb。其结果是,前内轮2a以及后内轮3a的接地载荷变得小于前外轮2b以及后外轮3b的接地载荷。因此,此时如图8a所示,相对于前内轮2a以及后内轮3a的摩擦圆的直径变得小于相对于前外轮2b以及后外轮3b的摩擦圆的直径。此外,如上所述,在各轮胎的接地面产生与各轮胎的接地载荷大致成比例的横向力fy,因此,此时如图8a所示,在前内轮2a、前外轮2b、后内轮3a以及后外轮3b的接地面分别产生与对应的摩擦圆的直径大致成比例的横向力fy。
39.另外,如上所述,在本发明涉及的实施例中,设计为当车辆1产生了大的横向加速度gy时,先产生转向不足(或侧滑)。另一方面,在使车辆1例如左转弯时,如图8a所示,在前外轮2b以及后外轮3b的接地面产生的横向力fy与在前内轮2a以及后内轮3a的接地面产生的横向力fy相比十分大。因此,在本发明涉及的实施例中,如图8a所示,设计为在前外轮2b的接地面产生的横向力fy大于在后外轮3b的接地面产生的横向力fy,以便在使车辆1例如左转弯时先产生转向不足。
40.另一方面,图8b表示了车辆1在加速驾驶的状态下左转弯的情况。此时,在车辆1同时产生图6a所示那样的力矩ma和图6b所示那样的力矩mb,其结果是,前内轮2a的接地载荷最小,后内轮3a的接地载荷第二小。在这种情况下,也与图8a所示的情况同样,在前内轮2a以及后内轮3a的各接地面产生的横向力fy变小。因此,此时若将与前内轮2a的接地载荷以及后内轮3a的接地载荷成比例的驱动转矩分别赋予给前内轮2a以及后内轮3a,则在前后力fx与横向力fy的合力fxy不超过摩擦圆的范围内,能够将在前内轮2a以及后内轮3a的接地面产生的前后力fx提高至极限附近为止。若能够这样将在前内轮2a以及后内轮3a的接地面产生的前后力fx提高至极限附近,则能够大幅度提高加速性能。
41.然而,当车辆1在加速驾驶的状态下例如左转弯的情况下,若将与前内轮2a的接地载荷以及后内轮3a的接地载荷成比例的驱动转矩分别赋予给前内轮2a以及后内轮3a,则施加于前内轮2a的驱动转矩小于施加于后内轮3a的驱动转矩。该情况下,施加于前外轮2b的驱动转矩与施加于前内轮2a的驱动转矩同样减小,施加于后外轮3b的驱动转矩与施加于后内轮3a的驱动转矩同样增大。这样,若施加于前外轮2b的驱动转矩减小,则由于前外轮2b的前后力fx与横向力fy的合力fxy不会超过摩擦圆,另外,后外轮3b的前后力fx与横向力fy的合力fxy至极限为止留有余量,所以能够增大施加于后外轮3b的驱动转矩。因此,在车辆的转弯时,关注前内轮2a的接地载荷与后内轮3a的接地载荷,在前内轮2a的接地载荷大于后内轮3a的接地载荷时,使向前内轮2a的驱动转矩的分配量即驱动力的分配量大于向后内轮3a的驱动转矩的分配量即驱动力的分配量,在前内轮2a的接地载荷小于后内轮3a的接地载荷时,使向前内轮2a的驱动转矩的分配量即驱动力的分配量小于向后内轮3a的驱动转矩的分配量即驱动力的分配量,由此能够确保优良的加速性能。
42.鉴于此,在本发明中,在向四轮驱动车辆的各车轮分配驱动力的四轮驱动力分配装置中,在车辆1转弯时基于前内轮2a的接地载荷与后内轮3a的接地载荷来调整向前内轮2a的驱动力分配量与向后内轮3a的驱动力分配量,转弯中的前内轮2a的接地载荷相对于后内轮3a的接地载荷的比例越小,则使向前内轮2a的驱动力分配量越小于向后内轮3a的驱动力分配量。
43.该情况下,在本发明涉及的一个实施例中,向前内轮2a以及前外轮2b分配相同的
驱动转矩即驱动力,向后内轮3a以及后外轮3b分配相同的驱动转矩即驱动力。即,转弯中的前内轮2a的接地载荷相对于后内轮3a的接地载荷的比例越小,则向一对前轮2a、2b的驱动力分配量越小于向一对后轮3a、3b的驱动力分配量。
44.另外,在本发明涉及的优选实施例中,在车辆转弯时计算前内轮2a的接地载荷与后内轮3a的接地载荷的比率,在转弯中根据该比率来向前内轮2a与后内轮3a分配驱动力。并且,该情况下,在本发明涉及的优选实施例中,在转弯中根据该比率来向一对前轮2a、2b与一对后轮3a、3b分配驱动力。鉴于此,接下来参照图9a、图9b以及图10对计算转弯中的前内轮2a的接地载荷与后内轮3a的接地载荷的比率的方法进行说明。
45.图9a是与图6a同样的从横向观察车辆1时的图,图9b与图6b同样是从前方观察车辆1时的图。其中,在图9a以及图9b中,hs表示重心高度,t表示车辆轮距,l表示轴距,wf表示在车辆停止状态下施加于一对前轮2a、2b的车辆载荷,wr表示在车辆停止状态下施加于一对后轮3a、3b的车辆载荷,g
x
表示前后加速度,gy表示横向加速度。因此,如图9a以及图9b所示,车辆停止状态下的各前轮2a、2b的接地载荷为wf/2,车辆停止状态下的各后轮3a、3b的接地载荷为wr/2。
46.另外,若将车辆1的重量设为m、对车辆1施加了前后加速度g
x
时的分别施加于前轮2a及前轮2b的载荷的变化量以及分别施加于后轮3a及后轮3b的载荷的变化量设为δwx,则在图9a中,当在车辆1产生了前后加速度g
x
时,图6a所示那样的力矩ma(=m
·
g
x
·
hs)作用于车辆1。由于该力矩ma的1/2产生引起分别施加于前轮2a以及后轮2b的载荷的变化的力矩(δwx
·
l),该力矩ma的剩余的1/2产生引起分别施加于前轮2b以及后轮3b的载荷的变化的力矩(δwx
·
l),所以如图9a所示,各前轮2a、2b以及各后轮3a、3b的接地载荷变化量δwx成为δwx=1/2
·
m
·
g
x
·
hs/l。
47.另一方面,当在车辆1产生横向加速度gy时,图6b所示那样的力矩mb(=m
·
gy
·
hs)作用于车辆1。但是,该情况下,力矩mb的分配比例与在车辆1产生前后加速度g
x
时稍微不同。即,在车辆中,通常对于前轮的悬架装置的弹簧力强于对于后轮的悬架装置的弹簧力,在本发明涉及的实施例中,对于前轮2a、2b的悬架装置的弹簧力也强于对于后轮3a、3b的悬架装置的弹簧力。因此,如图9b所示,在对车辆1施加了横向加速度gy时,引起分别施加于前内轮2a以及前外轮2b的载荷的变化的力矩大于引起分别施加于后内轮3a以及后外轮3b的载荷的变化的力矩。
48.该情况下,若将dwf作为力矩mb的分配比例、将力矩mb向引起分别施加于前内轮2a以及前外轮2b的载荷的变化的力矩的分配比例设为dwf、将力矩mb向引起分别施加于后内轮3a以及后外轮3b的载荷的变化的力矩的分配比例设为(1-dwf)、将前内轮2a以及前外轮2b的接地载荷变化量设为δwy、将后内轮3a以及后外轮3b的接地载荷变化量设为δwz,则当在车辆1产生了横向加速度gy时,力矩mb
·
dwf产生引起分别施加于前内轮2a以及前外轮2b的载荷的变化的力矩(δwy
·
t),力矩mb
·
(1-dwf)产生引起分别施加于后内轮3a以及后外轮3b的载荷的变化的力矩(δwz
·
t)。因此,前内轮2a以及前外轮2b的接地载荷变化量δwy如图9b所示,成为δwy=(m
·
gy
·
hs/l)
·
dwf,后内轮3a以及后外轮3b的接地载荷变化量δwz如图9b所示,成为δwz=(m
·
gy
·
hs/l)
·
(1-dwf)。其中,力矩mb的分配比例dwf例如为0.6。
49.在车辆1的转弯中,由于当在车辆1产生了前后加速度g
x
时,前内轮2a的接地载荷
减少,在产生了横向加速度gy时,前内轮2a的接地载荷也减少,所以如图10中用a式所示,前内轮2a的接地载荷变化量δwf成为产生了横向加速度gy时的前内轮2a以及前外轮2b的接地载荷变化量(减少量)δwy=(m
·
gy
·
hs/l)
·
dwf与在车辆1产生了前后加速度g
x
时的各前轮2a、2b以及各后轮3a、3b的接地载荷变化量δwx=1/2
·
m
·
g
x
·
hs/l之和。与此相对,在车辆1的转弯中,由于在车辆1产生了前后加速度g
x
时,后内轮3a的接地载荷增大,在产生了横向加速度gy时,后内轮3a的接地载荷减少,所以如图10中用a式所示,后内轮3a的接地载荷变化量(减少量)δwr成为从产生了横向加速度gy时的前内轮2a以及前外轮2b的接地载荷变化量δwy=(m
·
gy
·
hs/l)
·
(1-dwf)减去在车辆1产生前后加速度g
x
时的各前轮2a、2b以及各后轮3a、3b的接地载荷变化量δwx=1/2
·
m
·
g
x
·
hs/l而得的值。
50.另外,如上所述,车辆停止状态下的前轮2a的接地载荷为wf/2,因此,在车辆1的转弯中产生了前后加速度g
x
以及横向加速度gy时的前内轮2a的接地载荷成为从wf/2减去前内轮2a的接地载荷变化量δwf而得的值(wf/2―δwf)。另一方面,车辆停止状态下的后轮3a的接地载荷为wr/2,因此,在车辆1的转弯中产生了前后加速度g
x
以及横向加速度gy时的后内轮3a的接地载荷成为从wr/2减去后内轮3a的接地载荷变化量δwr而得的值(wr/2―δwr)。这样,在本发明涉及的第1实施例中,具备检测车辆前后方向的加速度的前后加速度传感器50以及检测车辆横向的加速度的横向加速度传感器51,根据由前后加速度传感器50检测出的前后加速度g
x
以及由横向加速度传感器51检测出的横向加速度gy来计算前内轮2a的接地载荷(wf/2―δwf)与后内轮3a的接地载荷(wr/2―δwr)的比率,并与这些前内轮2a的接地载荷(wf/2―δwf)和后内轮3a的接地载荷(wr/2―δwr)成比例地向前内轮2a与后内轮3a分配驱动转矩、即驱动力。
51.此外,在本发明涉及的实施例中,如图10的b式所示,使用这些前内轮2a的接地载荷(wf/2―δwf)以及后内轮3a的接地载荷(wr/2―δwr)来计算车辆转弯时的向前内轮2a的驱动转矩、即驱动力的分配量dpf和向后内轮3a的驱动转矩、即驱动力的分配量dpr(=1-dpf),在转弯中根据这些分配量dpf以及dpr来向前内轮2a与后内轮3a分配驱动力。此外,在该第1实施例中,在转弯中根据这些分配量dpf以及dpr来向一对前轮2a、2b与一对后轮3a、3b分配驱动力。
52.图11示出了表示各轮胎的前后力fx与横向力fy的合力fxy为极限时在车辆1产生的前后加速度g
x
以及横向加速度gy的关系的计算结果。其中,在图11中,q1表示进行了前轮驱动的情况,q2表示进行了后轮驱动的情况,q3表示根据前内轮2a以及前外轮2b的接地载荷的平均值与后内轮3a以及后外轮3b的接地载荷的平均值的比率进行了向前内轮2a以及前外轮2b与后内轮3a以及后外轮3b的驱动力的分配的情况,q4表示根据前内轮2a的接地载荷与后内轮3a的接地载荷的比率进行了向前内轮2a以及前外轮2b与后内轮3a以及后外轮3b的驱动力的分配的情况。该图11所示的关系清楚地表示了实际的前后加速度g
x
以及横向加速度gy的关系。从图11可知,在如q4所示那样根据前内轮2a的接地载荷与后内轮3a的接地载荷的比率进行了向前内轮2a以及前外轮2b与后内轮3a以及后外轮3b的驱动力的分配的情况下,能够使各轮胎的前后力fx与横向力fy的合力fxy为极限时在车辆1产生的前后加速度g
x
以及横向加速度gy最大、即使加速性能与转弯性能最大。
53.接下来,参照图12~图13b对本发明涉及的第2实施例进行说明。在该第2实施例中,当使用图10的a式以及b式计算向一对前轮2a、2b的驱动转矩的分配量dpf以及向一对后
轮3a、3b的驱动转矩的分配量dpr时,使用前后加速度g
x
以及横向加速度gy的推断值。图12表示了在该第2实施例中使用的电子控制单元40等。从图12可知,在该第2实施例中,可以代替图1以及图3所示的前后g传感器50以及横向g传感器51,而由检测加速器开度的加速器开度传感器54以及检测内燃机转速的转速传感器55经由ad变换器47输入至输入端口45。在该第2实施例中,基于由加速器开度传感器54检测出的加速器开度、由转速传感器55检测出的内燃机转速、由转向角传感器52检测出的转向角以及由车速传感器53检测出的车速来推断前后加速度g
x
以及横向加速度gy。
54.首先对推断前后加速度g
x
的方法进行说明,若将驱动转矩分配器5以及差速器8、10中的减速齿轮比与内燃机的输出转矩相乘,则成为轮胎的驱动转矩,若将轮胎的驱动转矩除以轮胎的半径,则成为在轮胎的接地面产生的前后力fx。该前后力fx由车辆重量与前后加速度g
x
的积表示,由于轮胎的半径与车辆重量一定,所以结果,根据内燃机的输出转矩与减速齿轮比来决定前后加速度g
x
。另一方面,如图13a所示,内燃机的输出转矩是加速器开度与内燃机转速的函数,因此,根据加速器开度与内燃转速来求出内燃机的输出转矩。因此,在该第2实施例中,根据加速器开度、内燃机转速以及减速齿轮比来计算前后加速度g
x
,该前后加速度g
x
的计算值被作为前后加速度g
x
的推断值。
55.另一方面,对于横向加速度gy而言,进行转弯作用时的转向角越大则越大,进行转弯作用时的车速越大则越大。即,横向加速度gy成为转向角与车速的函数。在该第2实施例中,根据图13b所示的式子来计算横向加速度gy。其中,在图13b所示的式子中,st表示转向角,v表示车速,l表示轴距,n表示转向齿轮比(转向角与各轮胎的齿轮比),k表示稳定系数(根据车辆而决定的常量)。在该第2实施例中,根据转向角与车速,使用图13b所示的式子来计算横向加速度gy,将该前后加速度g
x
计算值作为前后加速度g
x
的推断值。
56.在该第2实施例中,使用这些前后加速度g
x
的推断值以及横向加速度gy的推断值来计算图10所示的向前内轮2a的驱动转矩的分配量dpf与向后内轮3a的驱动转矩的分配量dpr。即,在该第2实施例中,根据内燃机输出转矩以及内燃机与驱动轮间的齿轮比来推断前后加速度g
x
,并且根据转向角与车速来推断横向加速度gy,根据推断出的前后加速度g
x
以及推断出的横向加速度gy来计算前内轮2a的接地载荷与后内轮3a的接地载荷的比率。
57.图14~图16表示了相对于第1实施例以及第2实施例追加实施的实施例。首先,参照表示与图8b同样的状态的图14,在该实施例中,当使车辆1转弯时,求出为了将转弯性能提高至最大限度所需的横摆力矩mz,利用图1或者图3所示的制动控制装置32仅对前内轮2a与后内轮3a赋予制动力,以便产生该横摆力矩mz。此时,在轮胎的接地面产生的制动力在图14中被表示为前后力fx。该情况下,也与前内轮2a的接地载荷和后内轮3a的接地载荷成比例地对前内轮2a以及后内轮3a赋予制动力,以便制动力不超过抓地力的极限。即,在该实施例中,在车辆的转弯中,根据前内轮2a的接地载荷与后内轮3a的接地载荷的比率来分配赋予给前内轮2a与后内轮3a的制动力。
58.接下来,参照图15对制动力的分配方法进行说明。在图15中,a式以及b式与图10中的a式以及b式相同,因此,利用a式以及b式来计算车辆转弯时向前内轮2a的驱动转矩的分配量dpf与向后内轮3a的驱动转矩的分配量dpr(=1-dpf)。在该实施例中,使用这些分配量dpf与分配量dpr来进行制动力的分配。这样,在图15中,c图表示了为了将转弯性能提高至最大限度所需的横摆力矩mz。如c图所示,该横摆力矩mz是前后加速度g
x
与横向加速度gy
的函数。其中,这些前后加速度g
x
和横向加速度gy与在a式中使用的前后加速度g
x
和横向加速度gy相同。如c图所示,若横向加速度gy变大某种程度以上则横摆力矩mz增大,前后加速度g
x
越大则此时的增大量越大。
59.另外,若将车辆轮距设为t、将在内轮的接地面产生的制动力设为fxi,则当在内轮的接地面产生了制动力fxi时,在车辆产生fxi
·
t/2的横摆力矩,因此,为了产生横摆力矩mz,只要fxi
·
t/2=mz、即使制动力fxi为2mz/t即可。该情况下,在该实施例中,如图15的d式所示,根据分配量dpf与分配量dpr来分别分配对于前内轮2a的制动指示值fxif与对于后内轮3a的制动指示值fxir。即,对于前内轮2a的制动指示值fxif为(2mz/t)
·
dpf,对于后内轮3a的制动指示值fxir为(2mz/t)
·
dpr。基于这些制动指示值fxif以及制动指示值fxir由制动控制装置32控制向前内轮2a的制动液压与向后内轮3a的制动液压,以便在前内轮2a产生制动力fxif,并且在后内轮3a产生制动力fxir。
60.图16示出了表示当进行了转弯作用时在车辆1产生的前后加速度g
x
以及横向加速度gy的关系的计算结果。其中,在图16中,r1表示在车辆转弯时未进行产生横摆力矩mz的控制的情况,r2表示在车辆转弯时为了产生横摆力矩mz而进行了仅前内轮2a的制动控制的情况,r3表示在车辆转弯时为了产生横摆力矩mz而进行了仅后内轮3a的制动控制的情况,r4表示在车辆转弯时为了产生横摆力矩mz而根据前内轮2a的接地载荷与后内轮3a的接地载荷的比率进行了制动力向前内轮2a以及后内轮3a的分配的情况。该图16所示的关系清楚地表示了实际的前后加速度g
x
以及横向加速度gy的关系。因此,从图16可知,如r4所示,当为了在车辆转弯时产生横摆力矩mz而根据前内轮2a的接地载荷与后内轮3a的接地载荷的比率进行了制动力向前内轮2a以及后内轮3a的分配的情况下,能够增大在车辆1产生的前后加速度g
x
以及横向加速度gy、即能够提高加速性能与转弯性能。
61.接下来,参照图17对驾驶控制的一个例子进行说明。图17表示用于执行该驾驶控制的例程,例如根据每隔一定曲柄角度的中断来执行该例程。
62.参照图17,首先在步骤70中取得前后加速度g
x
以及横向加速度gy。该情况下,在第1实施例中,由前后g传感器50检测前后加速度g
x
,由横向g传感器51检测横向加速度gy。另一方面,在第2实施例中,根据加速器开度、内燃机转速以及减速齿轮比来推断前后加速度g
x
,根据转向角与车速来推断横向加速度gy。接下来,在步骤71中,使用图10或图15中的a式来计算前内轮2a的接地载荷变化量δwf以及后内轮3a的接地载荷变化量δwr。接下来,在步骤72中,计算向前内轮2a的驱动转矩的分配量dpf与向后内轮3a的驱动转矩的分配量dpr。接下来,在步骤73中,根据图15的c图来计算横摆力矩mz。
63.接下来,在步骤74中,使用图15中的d式来计算对于前内轮2a的制动指示值fxif以及对于后内轮3a的制动指示值fxir。接下来,在步骤75中,基于在步骤72中计算出的向前内轮2a的驱动转矩的分配量dpf与向后内轮3a的驱动转矩的分配量dpr来进行前轮2a、2b以及后轮3a、3b的驱动。接下来,在步骤76中,基于在步骤74中计算出的对于前内轮2a的制动指示值fxif以及对于后内轮3a的制动指示值fxir来进行前内轮2a的制动作用以及后内轮3a的制动作用。其中,在第1实施例以及第2实施例中,省略步骤73、74、76。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。