技术特征:
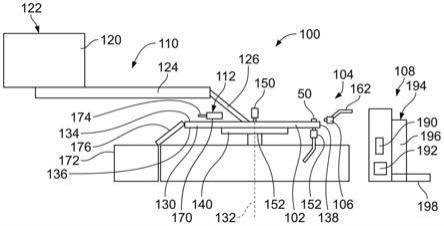
1.一种视觉检查系统,包括:绕轴线旋转的旋转分拣平台,所述旋转分拣平台将零件从第一位置旋转到第二位置;位于所述旋转分拣平台附近的检查站,所述检查站包括成像装置,以对所述零件的不同侧面进行成像;以及视觉检查控制器,其从所述成像装置接收图像并基于图像分析模型处理所述图像,所述视觉检查控制器处理所述图像以确定所述零件中的每一个的检查结果,所述视觉检查控制器具有人工智能学习模型,其操作为基于从所述成像装置接收到的所述图像更新所述图像分析模型。2.如权利要求1所述的视觉检查系统,其中所述图像分析模型基于来自所述人工智能学习模型的输入而随时间变化。3.如权利要求1所述的视觉检查系统,其中所述人工智能学习模型可在学习模型中操作以训练所述视觉检查控制器并开发所述图像分析模型。4.如权利要求1所述的视觉检查系统,其中所述旋转分拣平台包括透明的玻璃板,所述成像装置中的至少一个通过所述透明的玻璃板对所述零件进行成像。5.如权利要求1所述的视觉检查系统,其中,如果所述处理的图像基于所述图像分析模型是可接受的,则所述检查结果包括通过结果,如果所述处理的图像基于所述图案分析模型是有缺陷的,则所述检查结果包括拒绝结果。6.如权利要求1所述的视觉检查系统,其中所述视觉检查控制器通过基于所述图像分析模型执行图案识别来处理所述图像。7.如权利要求1所述的视觉检查系统,其中所述视觉检查控制器通过对所述图像中的边界和表面执行特征提取并将所述边界和表面与所述图像分析模型进行比较来处理所述图像。8.如权利要求7所述的视觉检查系统,其中所述人工智能学习模型基于从所述图像提取的所述边界和表面来更新所述图像分析模型。9.如权利要求1所述的视觉检查系统,还包括在所述检查站的上游位于所述旋转分拣平台附近的触发传感器,所述触发传感器基于所述触发传感器感测到所述零件而触发所述成像装置的操作。10.如权利要求1所述的视觉检查系统,还包括排出器和收集箱,所述排出器基于所述检查结果将所述零件从所述旋转分拣平台排出到所述收集箱中。11.一种视觉检查系统,包括:旋转分拣平台,具有绕轴线旋转的透明板,所述旋转分拣平台将零件从第一位置旋转到第二位置;位于所述透明板附近的检查站,所述检查站包括成像装置以对所述零件的不同侧面进行成像,所述成像装置包括上部成像装置、下部成像装置和第一侧成像装置,所述上部成像装置位于所述透明板的上方以对所述零件的顶侧进行成像,所述下部成像装置位于所述透明板的下方以通过所述透明板对所述零件的底侧进行成像,所述第一侧成像装置位于所述透明板附近,与所述透明板的上表面大致共面,以对所述零件的第一侧进行成像;以及视觉检查控制器,其从所述成像装置接收图像并基于图像分析模型处理所述图像,所述视觉检查控制器处理所述图像以确定所述零件中的每一个的检查结果,所述视觉检查控
制器具有人工智能学习模型,其操作为基于从所述成像装置接收到的所述图像更新所述图像分析模型。12.如权利要求11所述的视觉检查系统,其中所述图像分析模型基于来自所述人工智能学习模型的输入而随时间变化。13.如权利要求11所述的视觉检查系统,其中所述人工智能学习模型可在学习模型中操作以训练所述视觉检查控制器并开发所述图像分析模型。14.如权利要求11所述的视觉检查系统,其中所述视觉检查控制器通过对所述图像中的边界和表面执行特征提取并将所述边界和表面与所述图像分析模型进行比较来处理所述图像。15.如权利要求14所述的视觉检查系统,其中所述人工智能学习模型基于从所述图像提取的所述边界和表面来更新所述图像分析模型。16.如权利要求11所述的视觉检查系统,还包括在所述检查站的上游位于所述旋转分拣平台附近的触发传感器,所述触发传感器基于所述触发传感器感测到所述零件而触发所述成像装置的操作。17.如权利要求16所述的视觉检查系统,其中所述上部成像装置位于离所述触发传感器第一旋转距离处,所述下部成像装置位于离所述触发传感器第二旋转距离处,且所述第一侧成像装置位于离所述触发传感器第三旋转距离处,所述上部成像装置的成像的定时基于所述第一旋转距离,所述下部成像装置的成像的定位基于所述第二旋转距离,且所述第一侧成像装置的成像的定时基于所述第三旋转距离。18.如权利要求11所述的视觉检查系统,其中所述检查站还包括第二侧成像装置,其位于所述透明板附近,与所述透明板的上表面大致共面,以所述零件的第二侧进行成像,所述第二侧与所述零件的第一侧相对。19.如权利要求18所述的视觉检查系统,其中所述检查站还包括前侧成像装置和后侧成像装置,所述前侧成像装置位于所述透明板附近,与所述透明板的上表面大致共面,以对所述零件的前侧进行成像,所述后侧成像装置位于所述透明板附近,与所述透明板的上表面大致共面,以对所述零件的后侧进行成像。20.一种检查零件的方法,包括:将所述零件中的第一零件装载到旋转分拣平台上;将所述第一零件从第一位置旋转到第二位置;使用成像装置在位于所述旋转分拣平台附近的检查站处对所述第一零件进行成像,以对所述第一零件的不同侧面进行成像;在视觉检查控制器处从所述成像装置接收图像;基于图像分析模型在所述视觉检查控制器处处理来自所述成像装置的图像,以确定所述第一零件的检查结果;以及使用人工智能学习模型定制所述图像分析模型,以基于从所述成像装置接收的所述图像来更新所述图像分析模型。
技术总结
一种视觉检查系统包括旋转分拣平台,其绕轴线旋转以旋转零件。视觉检查系统包括位于旋转分拣平台附近的检查站,检查站包括成像装置以对零件的不同侧面进行成像。视觉检查系统包括视觉检查控制器,其从成像装置接收图像并基于图像分析模型处理来自成像装置的图像。视觉检查控制器处理图像以确定每个零件的检查结果。视觉检查控制器具有人工智能学习模型,其操作为基于从成像装置接收的图像更新图像分析模型。析模型。析模型。
技术研发人员:D.温 D.F.佩尔斯 T.达尔 S.K.帕克 A.L.斯旺 K.P.埃什尔曼
受保护的技术使用者:泰连服务有限公司
技术研发日:2021.05.14
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。