技术特征:
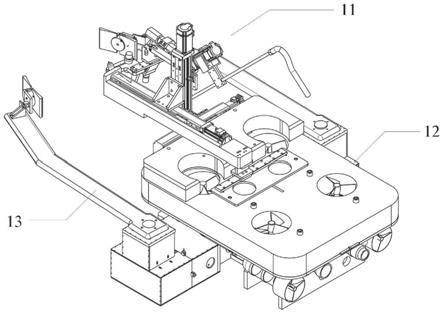
1.一种面向水下桩基础的有缆检修机器人,其特征在于,包括环抱装置、执行机构和水下平台;所述环抱装置用于实现对水下桩基础的夹持以保证检修作业的稳定性;所述执行机构实现检修作业;所述水下平台用于实现机器人整体运动位姿的改变;所述环抱装置包括左右相对设置的两组环抱组件;每组所述环抱组件包括吸盘式电磁铁、末端夹持装置、大臂、转动法兰、环抱装置伺服电机舱以及环抱装置减速机舱;所述大臂的一端通过转动法兰与环抱装置减速机舱连接,所述大臂的另一端通过末端夹持装置连接座与末端夹持装置连接,所述末端夹持装置上安装有吸盘式电磁铁,所述环抱装置减速机舱上设有l型角码安装槽,所述l型角码安装槽用于连接环抱装置减速机舱和环抱装置伺服电机舱;所述环抱装置伺服电机舱内部设有伺服电机,所述环抱装置伺服电机舱上设有设有环抱装置伺服电机接线端子,用于伺服电机接线;所述环抱装置减速机舱内部设有减速机。2.根据权利要求1所述的一种面向水下桩基础的有缆检修机器人,其特征在于,所述执行机构包括四自由度机械臂和末端检修装置,所述四自由度机械臂依其运动空间,包括x轴机械臂、y轴机械臂、z轴机械臂和u轴机械臂。3.根据权利要求2所述的一种面向水下桩基础的有缆检修机器人,其特征在于,所述x轴机械臂包括机械臂浮力材料、机械臂安装座、x轴线性滑轨、x轴线性滑轨安装座、x轴滚珠丝杠、x轴工作台、x轴伺服电机;所述机械臂浮力材料与机械臂安装座连接,所述机械臂安装座与水下平台连接,所述机械臂安装座通过x轴线性滑轨安装座与y轴机械臂安装座连接,所述x轴线性滑轨与x轴线性滑轨安装座安装固定;所述机械臂浮力材料的一侧部安装有x轴滚珠丝杠,所述x轴滚珠丝杠上设有x轴工作台,所述x轴滚珠丝杠的端部设有x轴伺服电机,所述x轴伺服电机上设有x轴伺服电机接线端子,用于x轴伺服电机接线,所述x轴伺服电机上设有x轴光电编码器接线端子,用于x轴光电编码器接线。4.根据权利要求2所述的一种面向水下桩基础的有缆检修机器人,其特征在于,所述y轴机械臂包括相对设置的y轴第一浮力材料、y轴第二浮力材料、以及用于连接y轴第一浮力材料和y轴第二浮力材料的y轴机械臂安装座,所述y轴机械臂安装座上安装有y轴伺服电机,所述y轴伺服电机的输出轴连接有y轴滚珠丝杠,所述y轴滚珠丝杠上设置有y轴工作台;所述y轴伺服电机上设有y轴伺服电机接线端子,用于y轴伺服电机接线;所述y轴伺服电机上设有y光电编码器接线端子,用于y轴光电编码器接线。5.根据权利要求2所述的一种面向水下桩基础的有缆检修机器人,其特征在于,所述z轴机械臂包括z轴安装座、固定安装在z轴安装座上的z轴滚珠丝杠、以及设于z轴滚珠丝杠端部的z轴伺服电机,所述z轴伺服电机的输出轴与z轴滚珠丝杠连接,所述z轴滚珠丝杠上设置有z轴工作台,所述z轴工作台与u轴安装座连接,所述z轴安装座与y轴机械臂连接;所述z轴伺服电机上设有z轴伺服电机接线端子,用于z轴伺服电机接线;所述z轴伺服电机上设有z轴光电编码器接线端子,用于z轴光电编码器接线。
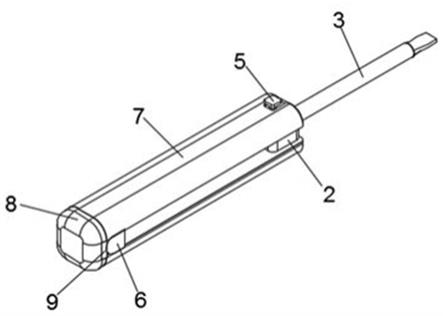
6.根据权利要求2所述的一种面向水下桩基础的有缆检修机器人,其特征在于,所述u轴机械臂包括u轴安装座、u轴伺服电机、u轴连接法兰、u轴行星减速机、高压水枪、高压软管、水枪喷嘴、高压水枪安装座;所述u轴安装座通过u轴安装座m5螺孔与z轴机械臂连接,所述u轴行星减速机安装在u轴安装座上,所述u轴伺服电机与u轴行星减速机连接,所述高压水枪安装在高压水枪安装座上,所述高压水枪的一端与高压软管连接,所述高压水枪的另一端与水枪喷嘴连接,所述u轴行星减速机通过u轴减速机安装槽与u轴连接法兰连接;所述u轴伺服电机上设有u轴伺服电机接线端子,用于u轴伺服电机接线;所述u轴行星减速机上设有u轴光电编码器接线端子,用于u轴光电编码器接线。7.根据权利要求2所述的一种面向水下桩基础的有缆检修机器人,其特征在于,所述末端检修装置包括焊枪安装座、固定安装在焊枪安装座上的焊枪柄,所述焊枪柄上设有焊枪头,所述焊枪头上连接有焊条;所述焊枪安装座通过末端执行机构l型扩展架与末端执行机构安装座连接,所述末端执行机构安装座与末端执行机构固定座子连接。8.根据权利要求7所述的一种面向水下桩基础的有缆检修机器人,其特征在于,所述末端执行机构固定座子分别与传感器安装座和水浸探头支撑架连接,所述传感器安装座上安装有线性结构光传感器和工业相机;所述水浸探头支撑架上安装有水浸探头。
技术总结
本发明涉及水下机器人技术领域,尤其涉及一种面向水下桩基础的有缆检修机器人,包括环抱装置、执行机构和水下平台;所述环抱装置包括吸盘式电磁铁、末端夹持装置、大臂、环抱装置伺服电机舱、环抱装置减速机舱等,所述环抱装置可夹持桩基础以保证检修作业的可靠性;所述执行机构包括四自由度机械臂和末端检修装置,所述末端检修装置包括高压水枪、焊枪、水浸探头、工业相机以及线性结构光传感器,可实现包括冲刷、探伤以及焊接在内的检修作业;所述水下平台为一有缆水下机器人,确定水下桩基础位姿后,通过电磁吸附原理实现对水下桩基础的环抱,并通过所述执行机构实现对水下桩基础的表面清理、无损检测和焊接修复的稳定作业。无损检测和焊接修复的稳定作业。无损检测和焊接修复的稳定作业。
技术研发人员:言淳恺 施可昕 汤紫洋 杨慧 华亮 顾菊平 刘旺朋 王力予 蒋欣越 郭九榕 周亮亮
受保护的技术使用者:南通大学
技术研发日:2021.09.06
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。