1.本公开涉及智能交通技术领域,尤其涉及车路协同中的路侧传感设备技术领域。
背景技术:
2.相关技术中,道路口采用激光雷达和监控相机组合的方式进行路端监测,监控相机在夜晚等照度极低场景下使用时,通常需要单独设置高功率的混合补光或者近红外光模块进行补光,硬件成本较高。
技术实现要素:
3.本公开提供了探测装置、路侧传感设备以及智能交通系统。
4.根据本公开的一方面,提供了一种探测装置,包括用于探测同一目标区域的雷达组件和相机组件,雷达组件包括第一控制与处理模块、发射模块和雷达接收模块,第一控制与处理模块用于控制发射模块发射激光,以及控制雷达接收模块接收激光的反射光并生成雷达传感信息;相机组件包括第二控制与处理模块和相机接收模块,第二控制与处理模块用于控制相机接收模块接收反射光并生成图像传感信息。
5.根据本公开的另一方面,提供了一种路侧传感设备,包括:
6.根据本公开上述实施例的探测装置;
7.同步控制装置,用于向第一控制与处理模块和第二控制与处理模块发送同步信号。
8.根据本公开的另一方面,提供了一种智能交通系统,包括:
9.根据本公开上述实施例的路侧传感设备;
10.路侧计算单元,用于从路侧传感设备接收图像数据和雷达数据,并执行数据计算处理。
11.根据本公开的技术,通过利用雷达组件的发射模块对相机接收模块进行补光,以在光照不足的场景下,提高反射光的光信号强度,从而提升相机组件输出的图像数据的像质和信噪比。由此,根据本公开实施例的探测装置,在光照条件较差的场景下可以对相机组件实现较好的补光效果,无需单独为相机组件设置补光设备,从而降低了探测装置的设备成本。
12.应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
13.附图用于更好地理解本方案,不构成对本公开的限定。其中:
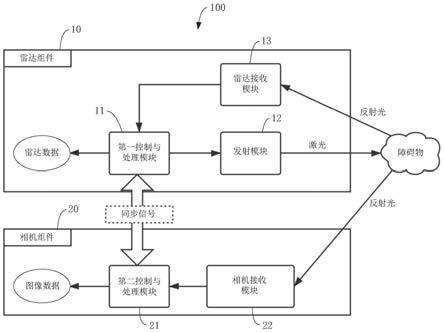
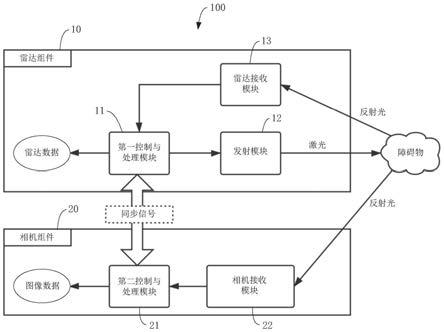
14.图1示出根据本公开实施例的探测装置的结构示意图;
15.图2示出根据本公开实施例的路侧传感设备的结构示意图。
16.附图标记说明:
17.路侧传感设备1;
18.探测装置100;
19.雷达组件10;第一控制与处理模块11;发射模块12;雷达接收模块13;
20.相机组件20;第二控制与处理模块21;相机接收模块22;
21.同步控制装置200;数据处理装置300。
具体实施方式
22.以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
23.下面参照图1描述根据本公开实施例的探测装置100。
24.如图1所示,根据本公开实施例的探测装置100包括用于探测同一目标区域的雷达组件10和相机组件20。
25.雷达组件10包括第一控制与处理模块11、发射模块12和雷达接收模块13,第一控制与处理模块11用于控制发射模块12发射激光,以及控制雷达接收模块13接收激光的反射光并生成雷达传感信息。其中,反射光由激光遇到障碍物形成。相机组件20包括第二控制与处理模块21和相机接收模块22,第二控制与处理模块21用于控制相机接收模块22接收反射光并生成图像传感信息。
26.本公开实施例的探测装置100可以应用于路侧传感设备1,路侧传感设备1安装于路侧环境,雷达组件10和相机组件20用于对路侧环境中的同一目标区域进行探测。可以理解的是,雷达组件10的探测视场和相机组件20的监测视场至少部分重合,且重合部分的视场对应于同一目标区域。
27.进一步地,雷达接收模块13和相机接收模块22可以通过内外参标定的方式,确定出雷达组件10的探测视场和相机组件20的监测视场中重合部分的视场。
28.示例性地,激光发射单元可以采用垂直腔面发射激光器(vertical
‑
cavity surface
‑
emitting laser,vcsel)或者半导体激光器(laser diode,ld)。优选地,激光发射单元可以采用垂直腔面发射激光器。垂直腔面发射激光器具有输出功率高、转换效率高以及激光质量高等优点,可以提高雷达模块和相机模块的传感精度、降低运行功耗以及提高工作可靠性。
29.需要说明的是,雷达接收模块13和相机接收模块22可以分别接收激光的反射光,即雷达接收模块13和相机接收模块22基于同一发射模块12发射的光信号,分别生成相应的电信号,从而实现对同一目标区域的探测。
30.在本公开实施例中,雷达接收模块13和相机接收模块22均为光电传感器,二者的光电原理基本类似。与相关技术中的毫米波雷达不同,本公开实施例中的雷达接收模块13以光为主导介质,可以实现对目标区域的像素级别的探测精度。
31.示例性地,雷达组件10的雷达接收模块13可以采用单光子雪崩二极管(single photon avalanche diode,spad)阵列或者硅光电倍增管(silicon photomultiplier,sipm),以实现像素级别的探测精度。
32.示例性地,相机组件20可以采用具有日夜共焦功能的红外相机。具体地,红外相机在白天开启rgb(red green blue,红绿蓝)工作模式并输出rgb格式的图像数据;红外相机在夜晚开启红外模式,红外相机的相机接收模块22可以包括红外接收器,红外相机基于接收到的红外光线输出灰度图格式的图像数据。基于灰度图格式的图像数据,可以得到目标区域的距离值。
33.示例性地,雷达组件10输出的雷达数据中可以包括点云数据、各个激光点的距离值以及强度值,相机组件20输出的图像数据中可以包括各个像素点的强度值和距离值。基于雷达数据中的强度值和图像数据中的强度值、以及雷达数据中的距离值和图像数据中的距离值,通过融合计算处理,可以得到增强后的距离值和强度值,从而在光线较暗的场景下,提高对目标区域的探测精度。
34.需要说明的是,在本公开实施例中,雷达组件10与相机组件20可以集成设置也可以单独设置。发射模块12可以集成设置于雷达组件10,也可以集成设置于相机组件20。
35.根据本公开实施例的探测装置100,通过设置雷达接收模块13和相机接收模块22共用的发射模块12,且雷达接收模块13和相机接收模块22基于发射模块12发射的激光所形成的反射光,分别生成雷达传感信息和图像传感信息,基于此,通过利用雷达组件10的发射模块12对相机接收模块22进行补光,以在光照不足的场景下,提高相机接收模块22的反射光的光信号强度,从而提升相机组件20输出的图像数据的像质和信噪比。由此,根据本公开实施例的探测装置100,在光照条件较差的场景下可以对相机组件20实现较好的补光效果,无需单独为相机组件20设置补光设备,从而降低了探测装置100的设备成本。
36.在一种实施方式中,第一控制与处理模块11和第二控制与处理模块21分别接收同步信号,并基于同步信号分别控制雷达接收模块13和相机接收模块22同步工作。
37.在一个示例中,第一控制与处理模块11和第二控制与处理模块21分别接收同步信号,以使相机组件20的时间信息与雷达组件10的时间信息保持同步。第一控制与处理模块11根据同步信号中预设的发射模块12发射激光的时间点和周期,控制发射模块12发射激光,并控制雷达接收模块13持续工作;第二控制与处理模块21根据同步信号中预设的相机组件20的拍照时间点和拍照间隔,控制相机接收模块22间歇性工作。
38.在另一个示例中,第一控制与处理模块11和第二控制与处理模块21之间可以相互通讯,第一控制与处理模块11向第二控制与处理模块21发送同步信号,以使第一控制与处理模块11和第二控制与处理模块21的时间信息保持同步,并按照同步信号中预先设定的相机组件20的拍照时间点和拍照周期控制相机接收模块22工作。
39.通过上述实施方式,可以使雷达接收模块13输出的雷达传感信息和相机接收模块22输出的图像传感信息的时间信息同步,从而保证后续对雷达传感数据和图像传感数据进行数据融合处理的可靠性和准确性。
40.在一种实施方式中,雷达组件10和相机组件20分别设有同步接口,第一控制与处理模块11和第二控制与处理模块21分别通过相应的同步接口接收同步信号。
41.示例性地,同步接口可以采用i/o(input/output,输入/输出)接口,以实现雷达组件10和相机组件20之间的硬件级同步。
42.通过i/o接口进行信号同步,可以将雷达接收模块13和相机接收模块22的时间信息差控制在微秒以下级别,从而实现雷达传感数据和相机传感数据的高度同步。
43.在一种实施方式中,第一控制与处理模块11被配置为,响应于同步信号,控制发射模块12间隔第一预设时长发射激光。第二控制与处理模块21被配置为,响应于同步信号,控制相机接收模块22间隔第二预设时长接收反射光,并生成图像传感信息,第二预设时长为第一预设时长的整数倍。
44.换而言之,第一预设时长即为雷达组件10的扫描周期,在一次扫描周期内,发射模块12发射一次激光。相应地,雷达接收模块13接收一次激光的反射光,完成对目标区域的一次扫描,并生成目标区域单帧的雷达传感信息。第二预设时长即为相机组件20的快门间隔时间,相机接收模块22每间隔第二预设时长接收一次激光的发射光,完成对目标区域的一次拍摄,并生成目标区域单帧的图像传感信息。
45.其中,第二预设时长为第一预设时长的整数倍,即相机组件20的快门间隔时间为雷达组件10的扫描周期的整数倍,相机接收模块22接收反射光的时间戳是雷达接收模块13接收反射光的时间戳的整数倍。
46.通过上述实施方式,可以确保相机组件20拍摄帧图像的时间间隔内,发射模块12发射的激光可以遍历目标区域,从而达到对相机组件20进行补光的目的,确保图像数据的像质。
47.在一种实施方式中,雷达组件10的探测视场由多个探测区域拼接形成,发射模块12包括多个发射区域,多个发射区域与多个探测区域一一对应。第一控制与处理模块11还被配置为,控制多个发射区域在第一预设时长内按照预设顺序依次发射激光。
48.示例性地,发射模块12可以采用面激光器,发射模块12包括阵列排布的多个激光发射子单元,每个发射区域由若干个激光发射子单元形成,第一控制与处理模块11可以单独控制其中的一个发射区域发射激光。由此,可以针对探测视场的多个探测区域中的关键区域,控制与关键区域对应的发射区域发射激光,从而控制该发射区域发射出的激光点亮关键区域,达到针对性补光的目的。
49.进一步地,第一控制与处理模块11可以按照预设顺序,控制多个发射模块12依次发射激光,以使激光依次点亮探测视场的多个探测区域。由此,发射模块12发射的激光可以按照预设顺序遍历探测视场的多个探测区域,且在完成一次遍历后,雷达组件10获取到目标区域的帧数据。
50.通过上述实施方式,可以实现对探测视场的分区域探测,且各个探测区域通过控制发射区域单独发射激光实现单独控制,从而针对探测视场中的某个特定的探测区域进行单独探测。并且,第一控制与处理模块11通过控制多个发射区域按照预设顺序依次发射激光,可以提高激光器发射激光的频率和占空比,从而提高激光的强度,提高对相机接收模块22的补光效果。
51.在一种实施方式中,雷达接收模块13包括单光子雪崩二极管阵列。
52.可以理解的是,单光子雪崩二极管为工作在盖革模式下的雪崩光电二极管。雪崩光电二极管在盖革模式下的偏置电压高于击穿电压,雪崩光电二极管在接收到光子后会进入反向击穿状态,并通过很大的反向电流,以此实现对光子进行探测的功能。
53.示例性地,单光子雪崩二极管可以通过互补式金氧半元件及制程(complementary metal oxide semiconductor,cmos)工艺进行加工,可以得到大批量且高集成度的单光子雪崩二极管阵列,其中单个单光子雪崩二极管的尺寸仅为15um*15um。由此,在保证雷达传
感单元具备高像素探测能力的基础上,还可以进一步缩减雷达传感单元的尺寸。
54.在本公开的其他示例中,雷达接收模块13还可以包括硅光电倍增管(sipm,silicon photomultiplier)。具体地,硅光电倍增管由多个(几个到几千个)雪崩光电二极管单元组成,各雪崩光电二极管单元由一个雪崩光电二极管和一个大阻值的淬灭电阻串联而成,雪崩光电二极管的工作模式为盖革模式从而形成单光子雪崩二极管。多个雪崩光电二极管单元相互并联形成面接收阵列。由于硅光电倍增管具有较大的动态范围,因而可以提高雷达传感单元的探测精度。此外,雷达接收模块13可以封装有多个硅光电倍增管,以形成多个面接收阵列,从而提高对反射回的激光脉冲信号的接收性能,降低对激光脉冲信号漏检的概率。
55.在一种实施方式中,相机接收模块22包括红外传感器,发射模块12发射的激光为近红外光(near infrared,nir)。
56.示例性地,相机接收模块22可以采用能够接收近红外光的红外传感器。可以理解的是,近红外光是介于可见光和中红外光之间的电磁波,具体是指波长在780至2526纳米范围内的电磁波,其中,近红外区可以划分为近红外短波(780至1100nm)和近红外长波(1100至2526nm)两个区域。其中,发射模块12发射的近红外光的波长可以为850纳米或940纳米。
57.通过上述实施方式,可以在发射模块12发射的激光在满足雷达组件10的探测功能的基础上,确保发射模块12发射的激光可以被相机接收模块22感应到,保证了发射模块12对相机组件20进行补光的可靠性和稳定性。
58.在一种实施方式中,雷达组件10还包括补光模块,补光模块与发射模块12集成设置,补光模块用于发射白光。
59.可以理解的是,白光是一种复合光,一般由二波长光或者三波长光混合而成。白光可以用于对雷达接收模块13和相机接收模块22共同补光。
60.示例性地,补光模块可以为白光激光器,且多个白光激光器集成设置,以在发射模块12的多个发射区域中形成白光补光区域。白光补光区域与探测视场中的多个探测区域中的某个特定的关键区域对应设置,即白光补光区域中的多个白光激光器发射的白光可以覆盖关键区域,从而达到对关键区域进行补光的目的。其中,关键区域可以为探测视场中距离较远的区域,以达到补强光照强度的目的,并提高雷达接收模块13和相机接收模块22的探测效果。
61.由此,对于雷达组件10的探测视场中的关键区域,可以针对性地进行补光,从而进一步提高雷达传感器对远距离目标物的探测精度和探测效果。
62.在一种实施方式中,第一控制与处理模块11被配置为,接收雷达传感信息并生成雷达数据;第二控制与处理模块21被配置为,接收图像传感信息并生成图像数据。
63.示例性地,第一控制与处理模块11基于雷达传感信息生成的雷达数据中包括距离信息和强度信息,第二控制与处理模块21基于图像传感信息生成的图像数据中包括亮度信息。雷达数据和图像数据被共同传输至路侧计算单元的数据处理装置300,强度信息和亮度信息具有高相关性,数据处理装置300基于强度信息和亮度信息进行加权叠加,得到亮度融合信息。基于亮度融合信息,可以对图像数据或雷达数据进行像质增强,从而提高了路侧传感设备1的探测精度。
64.由此,探测装置1可以输出雷达数据和图像数据,并且可以利用二者的融合信息对
雷达数据或图像数据进行增强,提高探测装置1的输出精度。
65.作为本公开实施例的另一方面,还提供了一种路侧传感设备1。
66.如图2所示,该路侧传感设备1包括根据本公开上述实施例的探测装置100和同步控制装置200。其中,同步控制装置200用于向第一控制与处理模块11和第二控制与处理模块21发送同步信号。
67.示例性地,同步信号用于指示第一控制与处理模块11按照预先设置的时间信息和时间戳,控制发射模块12每间隔第一预设时长内发射一次激光,以及指示第二控制与处理模块21按照预先设置的时间信息和时间戳,控制相机接收模块22每间隔第二预设时长对目标区域进行一次拍摄。其中,第二预设时长为第一预设时长的整数倍。
68.由此,可以实现对雷达组件10和相机组件20的同步控制,以使雷达组件10输出的雷达数据和相机组件20输出的图像数据保持时间同步。
69.示例性地,路侧传感设备1包括座体,探测装置100设于座体。座体的内部集成有供电模块,供电模块用于向雷达组件10和相机组件20分别供电。
70.示例性地,路侧传感设备1还包括数据处理装置300,数据处理装置300用于根据雷达数据中的强度信息和图像数据中的亮度信息,进行加权叠加处理以得到亮度融合信息。基于亮度融合信息,对雷达数据进行结构化特征提取,得到结构化数据。其中,结构化数据可以被传输至路侧计算单元,以执行相应的决策处理。
71.根据本公开实施例的路侧传感设备1,通过利用根据本公开上述实施例的探测装置100,在光照条件较差的场景下可以对相机组件20实现较好的补光效果,无需单独为相机组件20设置补光设备,从而降低了路侧传感设备1的硬件成本。
72.上述实施例的路侧传感设备1的其他构成可以采用于本领域普通技术人员现在和未来知悉的各种技术方案,这里不再详细描述。
73.作为本公开实施例的另一方面,还提供了一种智能交通系统。
74.该智能交通系统包括根据本公开上述实施例的路侧传感设备1和路侧计算单元,路侧计算单元用于从路侧传感设备1接收雷达数据和图像数据,并执行相应的数据计算处理。
75.示例性地,路侧计算单元可以为边缘计算单元,用于接收路侧传感设备1发送的雷达数据和图像数据,并执行相应的决策处理,得到目标区域内目标物的相关信息,从而实现对目标物的预测感知、路径规划以及预警等其他功能。
76.智能交通系统还可以包括云端服务器和车端服务器,路侧计算单元、云端服务器以及车端服务器中的任意两个之间均可以进行信息交互。
77.在本说明书的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。
78.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。在本公开的描述中,“多个”的含义是两个或两个以上,除
非另有明确具体的限定。
79.在本公开中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是通信;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本公开中的具体含义。
80.在本公开中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
81.上文的公开提供了许多不同的实施方式或例子用来实现本公开的不同结构。为了简化本公开的公开,上文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本公开。此外,本公开可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。
82.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。