1.本发明属于道路交通安全技术领域,尤其涉及一种基于多驾驶人风险评价的不良驾驶行为主动干预方法。
背景技术:
2.随着我国机动化发展速度的日益加快,道路交通需求迅猛增长,交通安全问题日益突出,已经成为影响可持续发展、全社会关注的热点问题。已有研究表明,驾驶人行为因素相关的事故占到所有事故的90%以上。因此,客观地评价驾驶人不良行为,并以此为基础开展主动干预,对提升道路交通安全性有着重要的现实意义。
3.针对驾驶人的不良驾驶行为综合评价以及在此基础上的主动干预方法,目前仍存在许多不足有待改进。例如,针对单一不良驾驶行为的分析,通常仅考虑不良驾驶行为出现的频次,却往往忽略不良驾驶行为的持续时间以及幅值;针对多种不良驾驶行为的综合评价,现有方法包含较强的主观成分,客观的评价模型还比较欠缺;针对不良驾驶行为主动干预,目前多集中于安全教育、道路信息标志、可变限速管理等手段,基于不良驾驶行为综合评价的实时干预有待深入研究;车载控制设备的应用虽可实现车辆级别的近实时行为管理,但却多针对单一车辆中驾驶人的不良行为,而缺少对车辆周围复杂交通环境的感知以及在此基础之上的多驾驶人干预。这里所述的驾驶行为是指驾驶人对速度等车辆运行参数的控制,风险是指因不良驾驶行为而导致的交通事故风险。
技术实现要素:
4.为了解决以上问题,本发明公开了一种基于多驾驶人风险评价的不良驾驶行为主动干预方法。本发明以滑动时间窗抽取驾驶人行车数据,通过引入数据包络分析思想,构建驾驶人相对风险评估模型,进而找到并干预多个风险驾驶人的方法。通过驾驶人的相对风险代替传统的绝对风险,从而避免对各类不良驾驶行为的绝对风险量化;通过滑动时间窗口获取驾驶人行车数据,找到多个风险驾驶人及其对应不良驾驶行为,以此为基础开展驾驶行为主动干预,从而改善驾驶人行车安全。
5.为达到此目的,本发明提供一种基于多驾驶人风险评价的不良驾驶行为主动干预方法,包括以下步骤:
6.(1)数据采集:搭建驾驶行为数据云平台,采集场景中多驾驶人的行车数据,为每个驾驶人建立数据档案,借助车载终端系统,实时采集车辆运行轨迹数据,上传至行为数据云平台。
7.(2)数据清洗与整理:以滑动时间窗方式抽取驾驶行为云平台历史数据,判断时间窗内车辆是否定位成功;根据经纬度参数,确定车辆行驶路段及各路段限速,将限速恒定不变且连续定位成功的路段作为基本路段;对各类驾驶行为设定阈值,定义并辨识驾驶人的各类不良驾驶行为,每类不良驾驶行为超出设定阈值的部分为该类不良驾驶行为的幅值。
8.(3)不良驾驶行为风险计算:利用聚类分析方法对各不良驾驶行为的所有幅值进
行分类,考虑所有单位时间,采用面积法,根据各不良行为所对应阈值的不同分别进行幅值累加。通过构建关系型事故风险变量,量化各类不良驾驶行为的单位距离风险;
9.(4)不良驾驶行为综合评价模型建立:借鉴数据包络分析思想,以驾驶人各类不良驾驶行为的单位距离风险及其权重作为模型输入,以被评价驾驶人相对于其他驾驶人的不良驾驶行为基本得分最低为目标函数,构建基于可变权重的不良驾驶行为综合评价模型,计算不良驾驶行为基本得分,得到基于个体的各类不良驾驶行为权重分配;
10.(5)不良驾驶行为综合得分计算:为实现所有驾驶人的量化排序,利用交叉指数法,考虑所有驾驶人的不良驾驶行为权重分配,计算各个驾驶人的不良驾驶行为综合得分;
11.(6)不良驾驶行为主动干预:根据不良驾驶行为综合得分,找到时间窗内的多个风险驾驶人,并对其进行等级分类,针对不同风险等级驾驶人,分析其所存在的不良驾驶行为,实时生成主动干预策略,借助驾驶行为数据云平台的信息收发功能,及时发布到指定的车载终端系统,以实现与风险驾驶人的信息交互。
12.作为本发明进一步改进,所述步骤(2)的具体操作方法为:
13.(21)以滑动时间窗的方式抽取驾驶行为云平台历史数据,生成实时数据文件;
14.(22)根据步骤(1)中车载终端系统定位时的卫星数数量,筛选出没有定位成功的时间段。当使用任何gps设备采集数据时,需要广阔的上空环境,考虑到卫星掉线严重的区域(如跟踪卫星数从10颗减少到8颗以下)可导致定位失败,定位失败的记录条经纬度均为0。
15.(23)根据步骤(21)的实时车辆经纬度信息,基于python将wgs84坐标系下的经纬度转换为地图软件坐标系下的经纬度;
16.(24)利用地图软件api还原车辆行驶轨迹,确定各路段限速,以限速固定不变且连续定位成功的路段为一个路段,对车辆行驶轨迹进行分割得到多个路段,分别计算得到路段的距离;
17.(25)提取步骤(21)中采集得到的车辆运行的加速度、减速度等参数;
18.(26)基于多种车辆运行参数,选取表征指标,定义并辨识各类不良驾驶行为。将车速超过一定阈值或加速度超过一定阈值(道路限速)的车辆行驶状态定义为不良行车状态;考虑到加(减)速时驾驶人所采取的驾驶行为不同,针对描述车辆行驶状态的速度、加速度、减速度指标,本发明考虑的不良驾驶行为包括:超速、急加速、急减速。
19.作为本发明进一步改进,所述步骤(3)同时考虑不良驾驶行为的发生频次、持续时间以及幅值,量化各类不良驾驶行为的相对事故风险,具体步骤为:
20.(31)利用聚类分析方法对各不良驾驶行为的所有幅值进行聚类,每一聚类分配一个严重性权重w
ij
,其中i表示各种不良驾驶行为,j的取值为1
……
n,n表示通过聚类所得到的风险等级类别数量;
21.(32)针对各种不良驾驶行为,根据聚类结果,采用面积法,借助类别权重变量w
ij
,在t时刻建立单位时间内超过基本阈值的驾驶行为数据与其所对应的事故风险的关联关系(表示在t时刻单位时间内的风险),将所有单位时间的各类风险分别累加求和,得到各类不良驾驶行为总风险,并根据出行路段长度计算单位距离风险。其中为t时刻第k个驾驶人的第i类不良驾驶行为的第j聚类阈值范围的曲线围合面积累加总和,单
位距离风险为总风险/路段长度。
22.作为本发明进一步改进,所述步骤(4)借鉴数据包络分析思想,建立不良驾驶行为综合评价模型,具体步骤为:
23.(41)以驾驶人各类不良驾驶行为的单位距离风险及其权重作为模型输入,对每种不良驾驶行为的风险进行加权求和,模型中除了严重性权重变量w
ij
外,还需要为每种不良驾驶行为的风险分配相应的加权权重,即v1,v2,
…
,v
p
,其中v
p
表示第p种不良驾驶行为的加权权重;
24.(42)模型以被评价驾驶人相对其他驾驶人的不良驾驶行为得分最低为目标函数,不良驾驶行为得分即为上述单位距离各种不良驾驶行为相对风险的加权求和;
25.(43)模型的约束条件为:在相同权重条件下,各个驾驶人的不良驾驶行为基本得分均大于等于1(1为基准值);通过聚类分析方法构建的严重性权重变量,应根据行为数据超出基本阈值的程度,定义严重性权重变量之间的关联关系,即超出基本阈值的程度越大,对应的严重性权重变量值应越大,由于正常驾驶行为的风险设为常量1,因此设定严重性权重的最小值应大于1;所有权重变量v
i
的值都应大于等于0。
26.所建立的不良驾驶行为综合评价模型如下:
[0027][0028][0029]
式中,r
k0
为被评价驾驶人k0的基本得分,p为不良驾驶行为的类别数,q为对各不良驾驶行为的所有幅值进行聚类得到的聚类数,v
i
为第i类不良驾驶行为的加权权重,w
ij
为第i类不良驾驶行为的第j聚类的严重性权重;x
ijk
为第k个驾驶人的第i类不良驾驶行为的第j聚类阈值范围的曲线围合面积累加总和;l
k
为第k个驾驶人出行的路段长度;n为驾驶人数量。
[0030]
作为本发明进一步改进,所述步骤(5)利用交叉指数法,计算驾驶人的不良驾驶行为综合得分,具体步骤为:
[0031]
(51)在步骤(4)确定的不良驾驶行为基本得分结果中,每个驾驶人的权重v
i
分配不尽相同,无法直接排序,因此利用交叉指数法,考虑所有驾驶人的不良驾驶行为权重分配,构建交叉指数矩阵;
[0032]
(52)将交叉指数矩阵中的每一列取平均值,得到各个驾驶人的不良驾驶行为综合得分,用于驾驶人排序。
[0033]
所述步骤(6)辨识时间窗内的多个风险驾驶人,生成主动干预策略,指导风险驾驶人行为决策,具体步骤为:
[0034]
(61)根据步骤(5)确定的不良驾驶行为综合得分,找到窗口时间内的多个风险驾驶人,通过综合得分聚类分析,将风险驾驶人区分为低风险、中风险、高风险三类;
[0035]
(62)针对不同的风险等级,分析各个风险驾驶人在窗口时间内出现的不良驾驶行为,生成不同的主动干预策略,例如:提示当前驾驶人的周围风险水平、对急加速驾驶人进行警告、对超速驾驶人推荐最优驾驶速度区间;
[0036]
(63)借助驾驶行为数据云平台的信息收发功能,将生成的主动干预策略及时发布到风险驾驶人的车载终端系统,进而指导风险驾驶人后续的行为决策,实现信息交互。
[0037]
有益效果
[0038]
本发明可以基于场景中多驾驶人的近期行车数据,综合评价驾驶人的事故风险,进而找到并干预多个风险驾驶人。在驾驶人的不良行为造成交通事故之前,通过评估驾驶行为可能带来的风险,并借助驾驶行为数据云平台的信息收发功能,主动实施行为干预,从而减少交通事故的发生,提高车辆行驶安全性。针对个体驾驶人而言,可通过发现驾驶人存在的驾驶安全问题,给出针对性的改善建议。针对群体驾驶人而言,通过综合评价驾驶人的驾驶表现,明确当前交通场景中每个驾驶人的驾驶水平高低,可基于速度协调、智能干预等技术为表现较差的驾驶人提供或推荐一种相对更安全的驾驶方案,进而提升整体道路交通安全性。
附图说明
[0039]
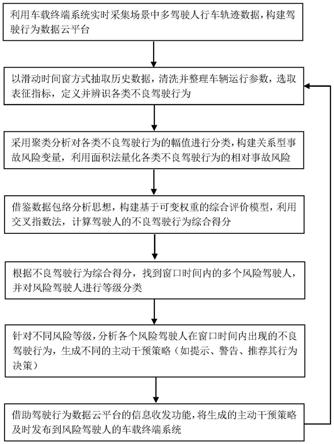
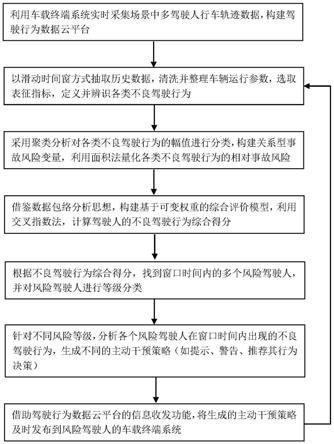
图1为基于多驾驶人风险评价的不良驾驶行为主动干预方法流程图;
[0040]
图2为路段信息与行车数据提取过程流程图;
[0041]
图3为基于可变权重的不良驾驶行为综合评价方法实施流程图。
具体实施方式
[0042]
下面结合附图对本发明作进一步详细说明。
[0043]
本发明提供一种基于多驾驶人风险评价的不良驾驶行为主动干预方法,利用车载终端系统实时采集场景中多驾驶人的自然驾驶数据,构建驾驶行为数据云平台为每个驾驶人建立数据档案;以滑动时间窗方式抽取历史行车数据,根据车辆定位信息,还原车辆运行轨迹,确定各行驶路段;基于轨迹分解,提取出限速恒定且连续定位成功的路段;以车辆运行参数为基础,选取判定指标,定义并辨识驾驶人的不良驾驶行为;采用聚类分析方法,将各类不良驾驶行为的所有幅值进行分类;根据不良驾驶行为的不同风险等级,采用面积法分别进行幅值累加;利用相对风险评价方法,计算驾驶人的不良驾驶行为综合得分,实现多个风险驾驶人的辨识;针对多个风险驾驶人生成不良行为干预策略,实时发布到对应的车载终端,实现与驾驶人的信息交互。
[0044]
图1为本发明的流程图,本实例中,搭建驾驶行为数据云平台,为每个驾驶人建立数据档案,借助车载终端系统,实时采集车辆运行轨迹数据,上传至行为数据云平台。基于车辆运行数据,选取速度、纵向加减速度、横向加速度等指标建立不良驾驶行为综合评价模型,利用lingo求解得到不良驾驶行为综合得分,辨识相对风险驾驶人并进行主动干预,主要可以分为以下六个阶段;
[0045]
(1)数据采集:本发明搭建驾驶行为数据云平台,为每个驾驶人建立数据档案,借助车载终端系统,实时采集车辆运行轨迹数据,上传至行为数据云平台;
[0046]
车载终端系统默认记录的参数包括:卫星数、时间、纬度、经度、速度、方位、高度、
垂直高度等,采集的数据形式如表1所示。
[0047]
表1基于车载终端系统采集的原始行车数据
[0048]
卫星数时间纬度经度车速方位高度垂直高度7839051914.169882
‑
7134.30271933.203144.5814.180.04783905.11914.169479
‑
7134.30306432.986143.7314.170783905.21914.169073
‑
7134.30340633.631144.1414.170.01683905.31914.168653
‑
7134.30374934.423145.8814.170.01683905.41914.168233
‑
7134.30409934.557144.2214.16
‑
0.01683905.51914.167804
‑
7134.30444634.917144.8114.16
‑
0.01
[0049]
(2)数据清洗与整理:以滑动时间窗方式抽取历史数据,删除定位失败的记录条。图2为路段信息与行车数据提取流程图,将utc时间转换为北京时间(时差为8小时),根据速度与时间修正车辆加速度与减速度,整理后的结果如表2所示。将wgs84坐标系下的经纬度转换为火星坐标系下的经纬度;导入高德地图api,还原出行车轨迹,根据路段限速信息,进行轨迹分解,提取出限速恒定且连续定位成功的路段作为基本路段;将每隔0.1s记录的位置按时间顺序连接,基于折线长度的叠加计算路段距离;选取表征指标,针对超速、急加速、急减速、急转弯等不良驾驶行为分别设置基本判定阈值,基于阈值法定义并辨识各类不良驾驶行为。
[0050]
表2行车数据信息整理
[0051]
时间纬度经度车速加速度减速度16:39:0531.902831118.90504533.2030.000
‑
0.60316:39:0531.902825118.90505132.9861.7920.00016:39:0531.902818118.90505733.6312.2000.00016:39:0531.902811118.90506234.4230.3720.00016:39:0531.902804118.90506834.5571.0000.00016:39:0531.902797118.90507434.9171.4580.000
[0052]
(3)不良驾驶行为风险计算:基于对不良驾驶行为不同风险程度的考虑,利用聚类分析方法对各类不良驾驶行为的所有幅值进行分类,构建关系型事故风险变量,利用面积法对各类不良驾驶行为每种风险等级分别进行幅值累加,量化各类危险驾驶行为的相对事故风险。
[0053]
(31)根据确定的基本判定阈值,计算各类不良驾驶行为在时间窗口内的所有幅值,并利用聚类分析方法对各类不良驾驶行为的幅值进行分类,每一类都被分配一个严重性权重变量w
ij
,其中i表示各种不良驾驶行为,j的取值为1
……
n,n表示通过聚类所得到的风险等级类别数量。
[0054]
(32)以超速、急加速、紧急制动不良驾驶行为为例,根据聚类结果,采用面积法,借助类别权重变量w
ij
,在t时刻建立单位时间内超过阈值的驾驶行为数据与其所对应的事故风险(表示在t时刻的风险)之间的联系,并将所有单位时间内的超速、急加速、紧急制动风险分别进行累加求和,得到这三种不良驾驶行为在路段上所对应的总风险。以超速为例,假设超出限速值的速度数据被聚为三类。在单位时间δt内,速度v
t
(v
t
表示在t时刻的速
度)将保持不变,在超过规定的限速值时对应一个类别权重变量w
1j
(j=1,2,3)。采用面积法,借助类别权重变量,在t时刻建立单位时间内超过限速值的速度所对应的面积v
t
δt(x
t1jk
)与其对应速度风险之间的联系,即将所有行驶时间内的速度风险进行累加求和,即可得到针对超速危险驾驶行为的路段驾驶总风险,并将其除以路段距离得到该路段的单位距离风险。同理,可得到其他不良驾驶行为的单位距离风险。
[0055]
(4)不良驾驶行为综合评价模型建立:图3为基于可变权重的不良驾驶行为综合评价方法实施流程图;借鉴数据包络分析思想,以驾驶人各类不良驾驶行为的相对风险及其权重作为模型输入,以被研驾驶人相对于其他驾驶人的不良驾驶行为基本得分最低为目标函数,构建基于可变权重的不良驾驶行为综合评价模型,计算不良驾驶行为基本得分,得到基于个体的各类不良驾驶行为权重分配。
[0056]
(41)以驾驶人各类不良驾驶行为的单位距离风险及其权重作为模型输入。为综合评价驾驶人的不良行为,需要对每种不良驾驶行为的风险进行加权求和,因此模型中除了权重变量w
ij
外,还需对超速、急加速、急减速、急转弯等不良行为的风险分配相应的加权权重,即v1,v2,v3,v4。
[0057]
(42)模型以被研驾驶人相对其他驾驶人的不良驾驶行为基本得分最低为目标函数,不良驾驶行为基本得分即为上述单位距离超速、急加速、急减速、急转弯风险的加权求和。
[0058]
(43)模型的约束条件为:在相同权重条件下,各个驾驶人的不良驾驶行为基本得分均大于等于1(1为基准值);通过聚类分析方法构建的严重性权重变量,应根据行为数据超出基本阈值的程度,定义严重性权重变量之间的关联关系,即超出基本阈值的程度越大,对应的严重性权重变量值应越大,由于正常驾驶行为的风险设为常量1,因此设定严重性权重的最小值应大于1;所有权重变量v
i
的值都应大于等于0。(5)不良驾驶行为综合得分计算:为实现所有驾驶人的有效量化排序,利用交叉指数法,考虑所有驾驶人的不良驾驶行为权重分配,计算各个驾驶人的不良驾驶行为综合得分。
[0059]
在步骤(4)确定不良驾驶行为基本得分结果中,每个驾驶人的权重分配不尽相同,无法直接排序,因此利用交叉指数法,考虑所有驾驶人的不良驾驶行为权重分配,构建交叉指数矩阵,得到各个驾驶人的不良驾驶行为综合得分,用于驾驶人排序。
[0060]
(6)不良驾驶行为主动干预:根据不良驾驶行为综合得分,找到时间窗内的多个风险驾驶人,并对其进行等级分类,针对不同风险等级驾驶人,分析其所存在的不良驾驶行为,实时生成主动干预策略,借助驾驶行为数据云平台的信息收发功能,及时发布到指定的车载终端系统,以实现与风险驾驶人的信息交互。
[0061]
(61)根据步骤(5)确定的不良驾驶行为综合得分,找到窗口时间内的多个风险驾驶人,通过综合得分聚类分析,将风险驾驶人区分为低风险、中风险、高风险三类。
[0062]
(62)针对不同的风险等级,分析各个风险驾驶人在窗口时间内出现的不良驾驶行为,生成不同的主动干预策略,例如:提示当前驾驶人的周围风险水平、对急加速驾驶人进行警告、对超速驾驶人推荐最优驾驶速度区间。
[0063]
(63)借助驾驶行为数据云平台的信息收发功能,将生成的主动干预策略及时发布到风险驾驶人的车载终端系统,进而影响风险驾驶人后续的行为决策,实现信息交互。
[0064]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限
制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。