1.本发明涉及冶金行业自动测温枪技术,更具体地说,涉及一种基于光电传感器的自动测温枪的探头套接/拔除检测方法。
背景技术:
2.冶金区域存在大量自动测温枪,但其所适配探头的套接作业与拔除作业,仍然主要靠人工完成。
3.冶金区域工作环境恶劣,具有高温及多粉尘的特点,人工作业存在较大的劳动强度及风险。
技术实现要素:
4.针对现有技术中存在的上述缺陷,本发明的目的是提供一种基于光电传感器的自动测温枪的探头套接/拔除检测方法,利用外部传感器测量技术进行适配探头的套接/拔除检测,使得套接/拔除作业准确进行。
5.为实现上述目的,本发明采用如下技术方案:
6.一种基于光电传感器的自动测温枪的探头套接/拔除检测方法,将所述光电传感器安装于驱动装置的执行机构上,所述驱动装置带动所述光电传感器对所述自动测温枪和/或所述探头进行扫描,通过计算单元计算得到所述自动测温枪和/或所述探头的位置及姿态信息,根据所述自动测温枪和/或所述探头的位置及姿态信息,通过所述执行机构上的手爪对所述自动测温枪和/或所述探头实施探头的套接/拔除作业;
7.所述检测方法包括适配探头套接检测和适配探头拔除检测。
8.较佳的,所述适配探头套接检测包括以下步骤:
9.1)在所述自动测温枪的外围设置套接区域,所述套接区域的底部为套接检测设定高度ⅲ,所述套接区域的顶部为套接检测设定高度ⅱ,所述套接检测设定高度ⅱ的上方再设置套接检测设定高度ⅰ,所述自动测温枪的末端位于所述套接区域内;
10.2)所述驱动装置带动所述执行机构使所述光电测距传感器在所述套接检测设定高度ⅰ和所述套接检测设定高度ⅱ上沿着世界坐标系o-xyz的y方向进行往复移动扫描所述自动测温枪,分别得到所述自动测温枪在所述套接检测设定高度ⅰ和所述套接检测设定高度ⅱ上的中心点,所述计算单元计算得到由两个中心点所组成的所述自动测温枪母线的位置及姿态信息;
11.3)所述驱动装置带动所述执行机构使所述光电测距传感器沿着步骤2)所得所述自动测温枪母线的位置及姿态信息向所述套接检测设定高度ⅲ进行移动扫描,得到所述自动测温枪轴线末端中心点的高度信息,在所得高度上将所述执行机构沿着世界坐标系o-xyz的y方向进行往复移动扫描所述自动测温枪的末端,将所述执行机构沿绕 z方向旋转角度后,再次移动扫描所述自动测温枪的末端,通过所述计算单元计算可得到自动测温枪末端中心点的位置信息;
12.4)根据所述自动测温枪轴线末端中心点的位置信息,所述驱动装置带动所述执行机构使所述手爪抓取探头,在所述套接区域内将所述探头套接到所述自动测温枪的末端。
13.较佳的,所述适配探头拔除检测包括以下步骤:
14.a)在所述自动测温枪的外围设置拔除区域,所述拔除区域的底部为拔除检测设定高度ⅲ,所述拔除区域的顶部为拔除检测设定高度ⅱ,在所述拔除检测设定高度ⅱ的上方再设置拔除检测设定高度ⅰ,所述自动测温枪上的探头位于所述拔除区域内;
15.b)所述驱动装置带动所述执行机构使所述光电测距传感器在所述拔除检测设定高度ⅰ和所述拔除检测设定高度ⅱ上沿着世界坐标系o-xyz的y方向进行往复移动扫描套接有所述探头的所述自动测温枪,将所述执行机构沿绕 z方向旋转角度后,再次移动扫描套接有所述探头的所述自动测温枪,通过所述计算单元计算分别得到所述探头在所述拔除检测设定高度ⅰ和所述拔除检测设定高度ⅱ上的中心点,从而计算得到由两个中心点所组成的所述探头轴线的位置及姿态信息;
16.c)所述驱动装置带动所述执行机构使所述光电测距传感器沿着步骤b)所得所述探头轴线向所述拔除检测设定高度ⅲ进行移动扫描,得到所述探头下端面的位置信息;
17.d)根据所述探头轴线的位置及姿态信息与下端面的位置信息,所述驱动装置带动所述执行机构使所述手爪抓取所述探头,在所述拔除区域内将所述探头从所述自动测温枪上进行拔除。
18.较佳的,所述套接检测设定高度ⅲ位置低于所述自动测温枪的末端位置。
19.较佳的,所述步骤4)中,抓取所述探头的所述手爪在所述驱动装置带动下将所述探头套接到所述自动测温枪上一小段后,将所述自动测温枪拉回到轴线与世界坐标系o-xyz的z轴平行的套接位置,然后进行套接。
20.较佳的,所述拔除检测设定高度ⅲ位置低于所述自动测温枪上的所述探头的下端面位置。
21.较佳的,所述步骤d)中,抓取所述探头的所述手爪在所述驱动装置带动下沿着所述探头轴线的位置及姿态进行进给,实现所述探头的拔除。
22.较佳的,所述步骤d)中,抓取所述探头的所述手爪在所述驱动装置带动下将所述探头拉回到轴线与所述世界坐标系o-xyz的z轴平行的拔除位置,然后进行所述探头的拔除。
23.较佳的,所述驱动装置为六自由度工业机器人。
24.较佳的,所述手爪的开口度大于所述自动测温枪上探头的外径。
25.在上述的技术方案中,本发明所提供的一种基于光电传感器的自动测温枪的探头套接/拔除检测方法,主要在于此方案在冶金区域实施时,无需对现有自动测温枪进行额外的改进,同时该方法可以增加探头自动套接/拔除作业的稳定性。
附图说明
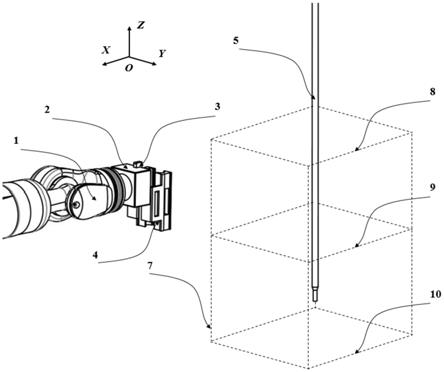
26.图1是本发明方法实施例适配探头套接检测的轴侧示意图;
27.图2是本发明方法实施例适配探头拔除检测的轴侧示意图;
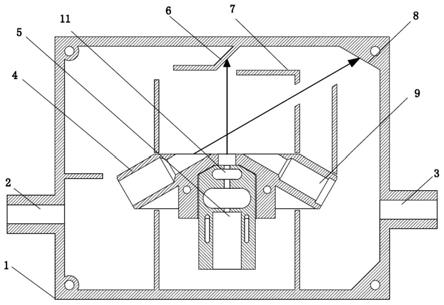
28.图3是本发明方法实施例执行机构的结构示意图;
29.图4是本发明方法实施例执行机构的俯视图;
30.图5是本发明方法实施例中光电测距传感器沿y方向往复移动扫略自动测温枪和/或探头的截面俯视图;
31.图6是本发明方法实施例中光电测距传感器沿y方向往复移动扫略所得执行机构中心位置点的示意图;
32.图7是本发明方法实施例中光电测距传感器沿绕 z方向旋转θ角度的示意图a(其中,θ角度为负值);
33.图8是本发明方法实施例中光电测距传感器沿绕 z方向旋转θ角度的示意图b;
34.图9是本发明方法实施例中光电测距传感器沿绕 z旋转θ方向扫略自动测温枪和/或探头的截面俯视图;
35.图10是本发明方法实施例中光电测距传感器沿绕 z旋转θ方向扫略所得执行机构中心位置点的示意图;
36.图11是本发明方法实施例中截面中心点定位方法的示意图;
37.图12是本发明方法实施例适配探头拔除检测步骤b)的示意图a;
38.图13是本发明方法实施例适配探头拔除检测步骤b)的示意图b。
具体实施方式
39.下面结合附图和实施例进一步说明本发明的技术方案。
40.请结合图1至图13所示,本发明所提供的一种基于光电传感器的自动测温枪的探头套接/拔除检测方法,将光电传感器3安装于驱动装置1的执行机构2上,驱动装置1带动光电传感器3对自动测温枪5和/或探头6进行扫略,通过计算单元计算得到自动测温枪5和/或探头6的位置及姿态信息,再根据自动测温枪5和/或探头6的位置及姿态信息,通过执行机构2上的手爪4对自动测温枪5和/或探头6实施探头6的套接/拔除作业。
41.本发明方法包括适配探头套接检测和适配探头拔除检测。
42.适配探头套接检测包括以下步骤:
43.1)在自动测温枪5的外围设置套接区域7,套接区域7的底部面设为套接检测设定高度ⅲ10,套接区域7的顶部面设为套接检测设定高度ⅱ9,在套接检测设定高度ⅱ9的上方再设置套接检测设定高度ⅰ8,自动测温枪5的末端位于套接设定区域7内;
44.2)驱动装置1带动执行机构2使光电测距传感器3在套接检测设定高度ⅰ8上沿着世界坐标系o-xyz的y方向进行往复移动扫略自动测温枪5,扫略时记录光电测距传感器3得到上升沿时执行机构2在世界坐标系o-xyz的位置值,根据两次上升沿所得的执行机构2的位置值,可以计算出套接检测设定高度ⅰ8上位于自动测温枪5截面 y方向的中心点处时执行机构2的位置值ⅰ(xⅰc
,yⅰc
,zⅰ);驱动装置1带动执行机构2使光电测距传感器3在套接检测设定高度ⅱ9上沿着世界坐标系o-xyz的y方向进行往复移动扫略自动测温枪5,扫略时记录光电测距传感器3得到上升沿时执行机构2在世界坐标系o-xyz的位置值,根据两次上升沿所得的执行机构2的位置值,可以计算出套接检测设定高度ⅱ9上位于自动测温枪5截面 y方向的中心点处时执行机构2的位置值ⅱ(xⅱc
,yⅱc
,zⅰ)。通过位置值ⅰ(xⅰc
,yⅰc
,zⅰ)和位置值ⅱ(xⅱc
,yⅱc
,zⅰ),可以得到自动测温枪5一条母线的表达式,从而得到套接检测设定高度ⅲ10的坐标;
45.3)驱动装置1带动执行机构2使光电测距传感器3沿着由位置值ⅰ和位置值ⅱ确定
的自动测温枪5母线向套接检测设定高度ⅲ10移动,记录光电测距传感器3得到下降沿时执行机构2在世界坐标系o-xyz的位置值,可以得到自动测温枪5末端截面 y方向的中心点处执行机构2的位置值
ⅲ’
(x
ⅲ’
c
,y
ⅲ’
c
,zⅲ);将执行机构2沿绕 z方向旋转角度θ后,再次移动扫略自动测温枪5的末端,可以得到自动测温枪5末端截面在旋转后方向的中心点处执行机构2的位置值
ⅲ”
(x
ⅲ”
c
,y
ⅲ”
c
,zⅲ),从而计算得到自动测温枪5末端截面的中心位置ⅲ(xⅲc
,yⅲc
,zⅲ);
46.4)驱动装置1带动执行机构2使手爪4抓取探头6,将探头6端面的位置调整到与由步骤3)计算所得的自动测温枪5末端位置相同,在套接区域7将探头6套接到自动测温枪5上;
47.套接方式为:抓取探头2的手爪4在驱动装置1带动下将探头6套接到自动测温枪5上一小段后,将自动测温枪5拉回到轴线与世界坐标系o-xyz的z轴平行的套接位置,然后进行套接。
48.适配探头拔除检测包括以下步骤:
49.a)在自动测温枪5的外围设置拔除区域11,拔除区域11的顶部面设为拔除检测设定高度ⅱ13,拔除区域11的底部面设为拔除检测设定高度ⅲ14,在拔除检测设定高度ⅱ13的上方再设置拔除检测设定高度ⅰ12,自动测温枪5上的探头6位于拔除区域11内;
50.b)驱动装置1带动执行机构2使光电测距传感器3在拔除检测设定高度ⅰ12上沿着世界坐标系o-xyz的y方向进行往复移动扫略自动测温枪5,扫略时记录光电测距传感器3得到上升沿时执行机构2在世界坐标系o-xyz的位置值,根据两次上升沿所得的执行机构2的位置值,可以计算出拔除检测设定高度ⅰ12上位于自动测温枪5截面 y方向的中心点处时执行机构2的位置值
ⅳ’
(x
ⅳ’
c
,y
ⅳ’
c
,zⅳ);将执行机构2沿绕 z方向旋转角度θ后,再次往复移动扫略自动测温枪5的末端,可以得到自动测温枪5末端截面在旋转后方向的中心点处执行机构2的位置值
ⅳ”
(x
ⅳ”
c
,y
ⅳ”
c
,zⅳ),从而计算出拔除检测设定高度ⅰ12上自动测温枪5截面的中心点ⅳ(xⅳ,yⅳ,zⅳ)。同样的方法可以计算出拔除检测设定高度ⅱ13上自动测温枪5截面的中心点
ⅴ
(x
ⅴ
,y
ⅴ
,z
ⅴ
)。对从(xⅳ,yⅳ,zⅳ)指向(x
ⅴ
,y
ⅴ
,z
ⅴ
)的向量记作向量d=(x
ⅳ-x
ⅴ
,y
ⅳ-y
ⅴ
,z
ⅳ-z
ⅴ
),简记为向量d=(d1,d2,d3)。则通过找到可得到向量d的一个向量c=(c1,c2,c3),求其旋转轴r及旋转角度参见图11和图12;
51.其中,旋转角度为:
[0052][0053]
旋转轴r为:
[0054][0055]
旋转轴r所对应的单位向量r0为:
[0056][0057]
通过罗德里格旋转公式(rodrigues’rotation formula)得到由向量c旋转到向量
d的旋转矩阵t为:
[0058][0059]
进一步,根据所选取的欧拉角顺序,可以得到对应的欧拉角,从而实现对探头6轴线的定位;
[0060]
c)驱动装置1带动执行机构2使光电测距传感器3沿着由中心点ⅳ和中心点
ⅴ
确定的探头6轴线向拔除检测设定高度ⅲ14移动,记录光电测距传感器3测量值得到下降沿时执行机构2在世界坐标系o-xyz的位置值,可以得到自动测温枪5上探头6的下端面高度值z
ⅵ
;
[0061]
d)根据步骤c)所得的探头6的端面高度值z
ⅵ
,驱动装置1带动执行机构2使手爪4调整合适的高度,将手爪4的位置与姿态调整到与由步骤b)和c)计算所得的探头6的位置和姿态相同,使用手爪4抓取探头6,在拔除区域11将探头6从自动测温枪5上进行拔除;
[0062]
拔除方式一:抓取探头6的手爪4在驱动装置1带动下沿着探头6轴线的位置及姿态进行进给,实现拔除;
[0063]
拔除方式二:抓取探头6的手爪4在驱动装置1带动下将探头6拉回到轴线与世界坐标系z轴平行的拔除位置,然后进行拔除。
[0064]
套接区域7可以覆盖自动测温枪5的位置及姿态的变化范围,且执行机构2进行步骤2)和3)时需要在套接区域7以外的区域或沿着套接区域7的包络线进行。一种较佳的实施方式为,套接区域7设置为长方体,且其三条边与世界坐标系o-xyz的三个坐标轴平行。
[0065]
套接区域7内的套接设定高度应具有以下要求:
[0066]
1)套接检测设定高度ⅰ8及套接检测设定高度ⅱ9应当位于自动测温枪5截面直径较大的区域,且二者不重合;
[0067]
2)套接检测设定高度ⅲ10位置低于自动测温枪5的末端位置;
[0068]
3)套接检测设定高度ⅰ8、套接检测设定高度ⅱ9和套接检测设定高度ⅲ10在z方向上从高到低可等间距设置。
[0069]
拔除区域11可以覆盖套接探头6后自动测温枪5的位置及姿态的变化范围,且执行机构2进行步骤b)和c)时需要在拔除区域11以外的区域或沿着拔除区域11的包络线进行。一种较佳的实施方式为,拔除区域11设置为长方体,且其三条边与世界坐标系o-xyz的三个坐标轴平行。
[0070]
拔除区域11内的套接设定高度应具有以下要求:
[0071]
1)拔除检测设定高度ⅰ12及拔除检测设定高度ⅱ13应当位于套接在自动测温枪5上的探头6的手爪4的待抓取区域附近,且二者不重合;
[0072]
2)拔除检测设定高度ⅲ14位置高于套接在自动测温枪5上的探头6的上端面位置;
[0073]
3)拔除检测设定高度ⅰ12可低于拔除检测设定高度ⅱ13。
[0074]
本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。