1.本发明属于医疗技术领域,尤其是涉及一种手持式可翻转单孔腹腔镜。
背景技术:
2.经脐单孔腹腔镜手术是国际最前沿微创技术,手术中手术器械及设备经脐孔进入腹腔,利用脐部皱壁遮挡手术切口,经脐单孔腹腔镜微创技术与传统腹腔镜腹部微创手术比较,更具有突出的微创性、安全性、经济性、美观性、术后少疼痛等特性,随着腹腔镜技术的发展,从三孔、两孔发展到一孔的腹腔镜微创技术诊断治疗疝气,显示了创伤小、诊断明确、修补彻底和恢复快的优点,是现代疝气治疗的最佳选择。
3.单孔腹腔镜在使用的过程中,通过夹持的装置将夹钳进行固定和操作,其手部位置还是与传统的手术握持方式相同,即手掌向下弯扣,这种方式由于人类手部关节的特性在向上或关节外侧活动时不够顺畅,从而需要翻转操作或换手进行作业,且单一的夹持钳需要通过开设更多的孔洞才能进行容纳,而数量越多则越容易导致可冗余的环境变小,不方便进行手术操作。
4.为此,我们提出一种手持式可翻转单孔腹腔镜来解决上述问题。
技术实现要素:
5.本发明的目的是针对上述问题,提供一种可提高了手术时的活动空间的手持式可翻转单孔腹腔镜。
6.为达到上述目的,本发明采用了下列技术方案:一种手持式可翻转单孔腹腔镜,包括握持手柄和插入杆及固定罩,所述握持手柄与插入杆固定结合,且其内部均设空室,所述握持手柄内设有控制机构和联动机构,所述联动机构贯穿至插入杆并延伸至其外部;
7.所述固定罩上置有至少两个螺纹孔,所述握持手柄段上设有卡接件,用于以配合螺纹孔以螺纹连接的方式与固定罩固定连接。
8.在上述的手持式可翻转单孔腹腔镜中,所述握持手柄呈翻转状,上端头膨大下端头细小。
9.在上述的手持式可翻转单孔腹腔镜中,所述控制机构包括设置于握持手柄内的一对握持板,所述握持板的前端延伸至握持手柄的外部,所述握持板上固定连接有至少一根伸缩杆,所述伸缩杆上套设有第一弹簧,多块所述握持板均与联动机构固定连接。
10.在上述的手持式可翻转单孔腹腔镜中,多块所述握持板板体面积不同,面积比例依次为1:1.5,多块所述握持板呈阶梯状堆叠设置。
11.在上述的手持式可翻转单孔腹腔镜中,所述握持手柄内的内壁上对称设有滑槽,所述滑槽内滑动连接有与之相匹配的滑块,所述滑块分别与多块握持板的侧壁固定连接。
12.在上述的手持式可翻转单孔腹腔镜中,所述联动机构包括握持手柄内底部安装的多组第一限位组块,且共同穿插有同一根连接绳,所述连接绳的一端与握持板的底端固定连接,所述连接绳的另一端固定连接有摇摆杆,并与握持手柄内的内壁转动连接,所述摇摆
杆的另一个端头固定连接有硬杆,所述硬杆延伸至插入杆的内腔中,所述插入杆的内腔壁上固定连接有多组第二限位组块用于限制硬杆,所述硬杆插入至多个第二限位组块中,所述硬杆上套设有第二弹簧并固定连接有限位板,所述硬杆的端头固定连接有夹头。
13.在上述的手持式可翻转单孔腹腔镜中,所述摇摆杆与握持手柄的内腔连接部位位于偏离中心的位置。
14.在上述的手持式可翻转单孔腹腔镜中,两根所述硬杆上的夹钳大小比例为:。
15.在上述的手持式可翻转单孔腹腔镜中,所述卡接件包括套设于握持手柄上的卡环,所述卡环的内环上设有可塑形软胶。
16.在上述的手持式可翻转单孔腹腔镜中,所述插入杆的端头处环设有嵌槽,所述嵌槽内安装有led灯组。
17.与现有的技术相比,本手持式可翻转单孔腹腔镜的优点在于:
18.1、本发明通过设置的上翻式的握持手柄和多组夹钳及握持板的配合,以达到利用多组层叠设置的握持板可以在同一根插入杆中操作多个夹钳组的效果,有效的降低了单位空间中需要容纳的插入杆的数量,提高空间利用率,同时握持手柄的握持方式的不同也可更好的帮助医护人员进行操作。
19.2、本发明通过设置的led灯组和电池组的配合,以达到利用插入杆镶嵌led灯组的方式来为手术的内部环境提供较好的照明效果,同时多个led灯组也能够更好的消除阴影面,从而进一步提高了手术时的便捷性。
附图说明
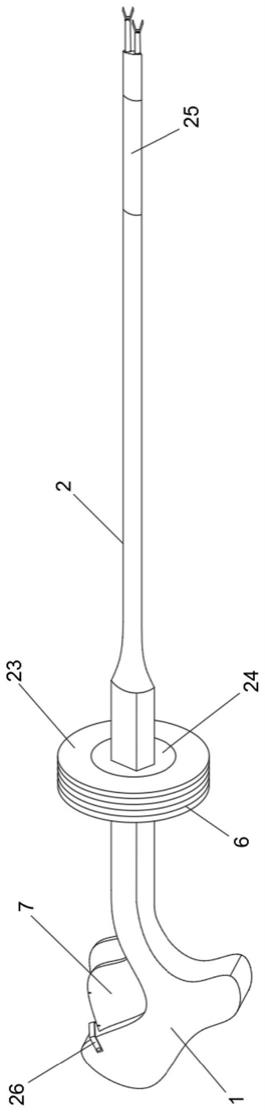
20.图1是本发明提供的一种手持式可翻转单孔腹腔镜的外部结构示意图;
21.图2是图1的内部透视图;
22.图3是图2中第一限位组块和第二限位组块的结构示意图;
23.图4是图2中两组夹钳的结构示意图;
24.图5是图2中a处的局部放大图;
25.图6是图2中b处的局部放大图;
26.图7是本发明提供的一种手持式可翻转单孔腹腔镜的整体结构示意图;
27.图8是本发明提供的一种手持式可翻转单孔腹腔镜的控制原理图;
28.图9是本发明提供的一种手持式可翻转单孔腹腔镜的电池组与 led灯组连接关系图。
29.图中,1握持手柄、2插入杆、3固定罩、4控制机构、5联动机构、6卡接件、7握持板、8伸缩杆、9第一弹簧、10滑槽、11滑块、 12第一限位组块、13连接绳、14摇摆杆、15硬杆、16第二限位组块、17第二弹簧、18限位板、19套头、20夹钳、21第三弹簧、22 连接线、23卡环、24可塑形软胶、25led灯组、26卡条、27卡槽。
具体实施方式
30.以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
31.实施例
32.如图1
‑
9所示,一种手持式可翻转单孔腹腔镜,包括握持手柄1 和插入杆2及固定
罩3,固定罩3为传统二代透明罩,用于连接人体和手术器材,作为一种媒介,其下端的开口大于上端的开口,下端开口用于与患者身体进行连接,直径为3
‑
5cm,具体连接方式与现有技术相同,在此不做赘述,图中未做出具体的连接结构和说明,插入杆 2为医用不锈钢材料,插入杆2的杆径为0.3
‑
0.6cm,握持手柄1与插入杆2固定结合,且其内部均设空室,即握持手柄1与插入杆2均为空心结构。
33.握持手柄1的内部还组装有电池组及配套开关,配套的开关用于控制电池组的对外供电情况,插入杆2的端头处环设有嵌槽,嵌槽内安装有led灯组25,led灯组25与电池组电性连接,电池组用于进行供电作业,不同插入杆2的电池组之间还可以通过串联线进行连接,用于对该插入杆2上的led灯组25进行协调供电照明,led灯组25 发光用来帮助内部光源的补充,同时利用多个led灯组25交叉堆叠的设置方式从而使得在进行操作时消除内部的阴影,使其达到类似于无影灯的效果,进一步的帮助医护人员进行更加精确的手术作业,led 灯组25的功率为0.5w,发热量较低,不会对人体内部组织器官造成伤害和影响,另外其长度可调,可通过调整led灯组25的长度的方式来进行光照亮度的改变,本发明中未设置可调节式的led灯组25,需要在制造是设置不同的尺寸规格。
34.如图1所示,握持手柄1呈翻转状,上端头膨大下端头细小,使手掌倒扣在其表面握持,握持手柄1用于和手掌掌面贴合,握持手柄 1分为上缘凸起和下缘凸起,上缘凸起和下缘凸起之间的连接部分为大拇指根部或手掌根部握持位置,大拇指半包裹顶住上缘凸起,利用中指或无名指夹持握持手柄1的杆状部分,小拇指放置于下缘凸起处,利用小拇指和大拇指及手掌掌面的操作即可操控握持手柄1的杆状部位,继而带动插入杆2进行移动操作,握持手柄1的杆状结构与端头长度比例为3
‑
5:1,且为四棱柱形状。
35.握持手柄1内设有控制机构4和联动机构5,联动机构5贯穿至插入杆2并延伸至其外部,控制机构4包括设置于握持手柄1内的一对握持板7,握持板7为片板状,握持板7并不限制于一对,也可以为三块或者其他数目,在本实施例中以两块做为基础技术进行演示,一对握持板7贴合设置用于方便手指间的快速操作,同时利用多根手指的协同操作来进行分别的驱动调控,多块握持板7板体面积不同,面积比例依次为1:1.5,若设置多块则依次进行等比例设置,多块握持板7呈阶梯状堆叠设置,其目的就是为了在手指间进行触摸式的分辨,从而使得在掌握一定熟练度的情况下可以不通过目视进行手动区别作业,具体的作业方式为,通过多根手指的弯曲,单次弯曲驱动一块握持板7从而使得握持板7发生位移,且有且只能一次弯曲一块握持板7,不能够同时操作多块握持板7进行夹持作业。
36.握持手柄1内的内壁上对称设有滑槽10,滑槽10内滑动连接有与之相匹配的滑块11,滑块11分别与多块握持板7的侧壁固定连接,握持板7的前端延伸至握持手柄1的外部,握持板7上固定连接有至少一根伸缩杆8,伸缩杆8上套设有第一弹簧9,当握持板7在手指的驱动下会将第一弹簧9进行压缩,第一弹簧9通过压缩回弹力从而配合握持板7进行往复作用,握持板7进行往复运动从而配合夹钳 20进行夹持作业,伸缩杆8配合滑块11来使得握持板7进行定向运动,另外双层的限制可更好的使得握持板7进行滑动作业,使其保持稳定,伸缩杆8远离握持板7的一端与握持手柄1的内室腔壁固定连接,第一弹簧9相抵与二者之间,另外,第一弹簧9为非均匀性弹簧,其初始段簧胆圈数较疏松,后端圈数相对密集,从而使得医护人员在手感上对夹钳20的夹持力度进行感知。
37.握持手柄1的上缘凸起还卡设有卡条26,卡条26呈门型结构,卡条26的两端与握持
手柄1的上缘凸起的两端侧壁均转动连接,以便于其进行上下一定范围上的转动,相对应的握持板7的上缘面上还刻有一对卡槽27,卡槽27分为两个,分别在其端面的前端和后端,前端的卡槽27用于配合卡条26进行夹钳20夹持后的卡紧,而后端的卡槽27则用于在卡条26滑动时有卡合的空间,由此可知,在对一块握持板7上前端的卡槽27进行卡紧的同时,卡条26同时卡进另一块握持板7后端上的卡槽27,从而来对夹钳20的姿态进行固定控制,继而腾出医护人员宝贵的手进行临时性的其他操作。
38.多块握持板7均与联动机构5固定连接,联动机构5包括握持手柄1内底部安装的多组第一限位组块12,第一限位组块12均匀分布于其内部用于形成稳定的轨道,且共同穿插有同一根连接绳13,连接绳13的一端与握持板7的底端固定连接,使得连接绳13贯穿该部分,从而形成稳定的结构输出,连接绳13的另一端固定连接有摇摆杆14,摇摆杆14与握持手柄1内的一侧内壁转动连接,摇摆杆14 与握持手柄1的内腔连接部位位于偏离中心的位置用于获得更大的移动线距离,由物理学公式可知移动距离和转动角度的关系为:相同的转动角度下,离轴越远的点平行的移动距离越大;
39.摇摆杆14的另一个端头固定连接有硬杆15,硬杆15延伸至插入杆2的内腔中,插入杆2的内腔壁上固定连接有多组第二限位组块 16用于限制硬杆15,第二限位组块16与第一限位组块12功能相同,均为形成类似的限制轨道,从而确定移动路径,硬杆15插入至多个第二限位组块16中,硬杆15上套设有第二弹簧17并固定连接有限位板18,第二弹簧17位于硬杆15和限位板18之间,第二弹簧17 会带动硬杆15在受力后自动回复,第二弹簧17为均质弹簧,硬杆 15的端头固定连接有夹头,夹头的工作形式为:在硬杆15受力后先向前伸出一端距离,该段距离即为了进一步提高医护人员在操作时的精确度,从而实现精准夹持。
40.夹头包括套头19,套头19上转动连接有夹钳20,夹钳20为橡胶材质,其内侧夹壁上设有纹路,两根硬杆15上的夹钳20大小比例为2:1,当然为了配合更多的夹持作业,同时也可以采用其他比例的夹钳20,从而完成不同情况下的夹持作业,夹钳20之间固定连接有第三弹簧21和连接线22,连接线22贯穿套头19并与插入杆2固定连接,具体的来说,连接线22是从套头19的底部,也就是两个夹钳 20的中间处与其连接,再通过套头19的侧壁延伸出去,连接线22 的作用为带动两个夹钳20进行开合,在第三弹簧21的作用下进行开闭作业,从而完成夹持的效果;
41.固定罩3上置有至少两个螺纹孔,螺纹孔的目的是为了将握持手柄1等部件安插到固定罩3上,用螺纹进行固定,握持手柄1段上设有卡接件6,用于以配合螺纹孔以螺纹连接的方式与固定罩3固定连接,卡接件6包括套设于握持手柄1上的卡环23,卡环23与固定罩 3上的螺纹孔螺纹连接,卡环23的内环上设有可塑形软胶24,可塑形软胶24与握持手柄1接触,可塑形软胶24为软胶材质,也可以采用带有橡胶蒙皮的黏土材料,其内部有配合握持手柄1杆状段的棱形开口,棱形开口的内边还固定连接有橡胶条用于维持该开口的形状,棱形开口用于配合握持手柄1的插入和拔出,另外通过可塑形软胶 24,握持手柄1可进行多角度的调节,也可以通过插设方式进行翻转等动作,并进行短暂的形状固定作业。
42.尽管本文较多地使用了握持手柄1、插入杆2、固定罩3、控制机构4、联动机构5、卡接件6、握持板7、伸缩杆8、第一弹簧9、滑槽10、滑块11、第一限位组块12、连接绳13、摇摆杆14、硬杆 15、第二限位组块16、第二弹簧17、限位板18、套头19、夹钳20、第三弹簧21、连接线22、卡环23、可塑形软胶24、led灯组25、卡条26、卡槽27等术语,但并不排除使用其它术语的
可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。