1.本发明涉及无人机巡检技术领域,具体涉及一种基于北斗差分定位的无人机跟瞄通信系统及方法。
背景技术:
2.随着经济和技术发展,无人机飞行平台得到越来越多的应用,在无人机巡检技术领域主要是利用高分辨ccd相机系统获取遥感影像,并通过空中和地面控制系统实现影像的自动拍摄和获取,实现航迹的规划和监控、信息数据的压缩和自动传输、影像预处理等功能,可广泛应用于国家生态环境保护、航空摄影、测绘、矿产资源勘探、灾情监视、路桥施工、交通巡逻、电力巡线、治安监控、应急减灾、应急指挥、人工降雨、国防安全、国土资源勘探、城镇规划、地震调查、环境监测、森林防火、农作物估产、保护区野生动物监测、大气取样、海事侦察、边境巡视、禁毒侦察、消防侦察、生态环境保护、海洋环境监测、土地利用调查、水资源开发、农作物长势监测与估产、农业作业、自然灾害监测与评估、城市规划与市政管理、森林病虫害防护与监测、数字城市等领域。
3.在电网架空输电线路巡检中,无人机巡检极大的提高了巡视效率,直观、准确的反应了线路运行情况,已成为输电线路的重要巡检手段。但也面临着高清视频实时回传的通信问题。如专利(申请号为cn201410792210.9)涉及一种自主飞行四旋翼无人机路桥施工巡检系统,它包括自主飞行四旋翼无人机和处理器,自主飞行四旋翼无人机上设置有飞行控制器,飞行控制器的主体由处理器、若干无刷电机、北斗模块、数传电台、气压高度计、ahrs模块、避障传感器、图传模块、摄像机组成,处理器连接有若干无刷电机、电源、云台、北斗模块、数传电台、气压高度计、ahrs模块、避障传感器、图传模块,云台连接有摄像机,ahrs模块为飞行控制器的航向姿态参考系统,ahrs模块内设置有三轴陀螺仪、三轴加速度计和三轴磁阻计;北斗模块无线连接有卫星导航系统。该专利定位精度有待提高,并且回传的视频清晰度不够。
4.目前行业主要采用录像回来分析或在有无线运营商网络的地方采用无线公网的通信传输方案(视频画质不高,延时较大,且输电线路大多分布在地广人稀的地方,存在无线网络信号不稳定的问题)。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,本发明提供一种基于北斗差分定位的无人机跟瞄通信系统及方法。
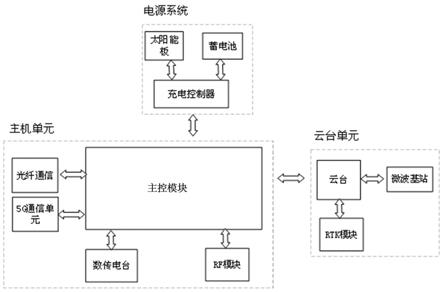
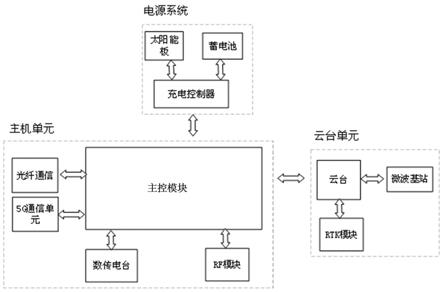
6.本发明的目的是通过以下技术方案来实现的:一种基于北斗差分定位的无人机跟瞄通信系统,包括主机单元、电源系统和云台单元;所述主机单元分别与所述电源系统和所述云台单元相连接;所述主机单元包括主控模块、光纤通信单元、数传电台和rf模块,光纤通信单元通过网口与主控模块相连接,数传电台和rf模块分别通过串口与主控模块相连接;所述电源系统包括充电控制器、太阳能板
和蓄电池,太阳能板和蓄电池分别与充电控制器相连接;所述云台单元包括云台系统、北斗差分定位模块和微波基站,微波基站通过网线与云台系统连接,北斗差分定位模块通过串口与云台系统连接。
7.所述主机单元还包括5g通信单元,5g通信单元通过usb 接口与主控模块连接。
8.一种基于北斗差分定位的无人机跟瞄通信方法,包括以下具体步骤:步骤一:建立跟瞄系统工作坐标系;步骤二:基于北斗差分定位原理,计算云台单元精确位置坐标,再由主控模块计算出云台单元地理位置信息到工作坐标系的转换矩阵;步骤三:将无人机实时地理位置信息转换为跟瞄系统工作坐标系中的工作坐标信息;步骤四:由主控模块根据无人机实时工作坐标信息,计算微波基站瞄准无人机飞行区域转动数据,并通过网络控制云台系统转动,实时动态调整云台系统姿态;步骤五:无人机通过跟瞄系统提供的无线宽带网络覆盖将高清实时视频回传给跟瞄系统主机单元,跟瞄系统主机单元再回传到无人机后台。
9.所述步骤一具体包括:以云台单元坐标位置作为坐标原点(0,0,0),以正北方向为y轴,正东方向为x轴,z轴符合“左手坐标系法则”,建立工作坐标系。
10.所述步骤二具体包括:跟瞄系统通过北斗差分定位模块获取云台单元的地理位置信息,并通过数传电台从位置服务商获取该区域的高精度定位差分数据,利用差分数据修正解算获取的地理位置信息,得到云台单元的高精度位置信息,再由主控模块计算出云台单元地理位置信息到工作坐标系的转换矩阵。
11.所述地理位置信息包括经度、纬度和高程坐标。
12.所述步骤三具体包括:无人机通过自带的北斗差分定位模块,实时获取无人机的地理位置信息,并通过rf模块从跟瞄系统主控模块获取差分定位数据,通过修正解算得到无人机的高精度地理位置信息,代入转换矩阵,得到无人机在跟瞄系统工作坐标系中的工作坐标信息。
13.本发明的有益效果:1、本发明解决无人机巡检高清视频实时回传问题,1套跟瞄系统可以实现半径20公里的信号定向区域覆盖,经济效益高;2、本发明基于北斗差分定位原理获取无人机和跟瞄主机位置,定位精度高,云台动态响应快,跟瞄实时性强,可靠性高;3、本发明通过微波基站提供网络信号覆盖,传输带宽高,时延小。
14.4、跟瞄系统回传到后台服务器网络方案支持opgw 光纤有线传输或5g通信传输,传输带宽高,稳定可靠。
15.5、本发明建立跟瞄系统工作坐标系,将无人机地理位置转换成工作坐标系中的坐标位置,可以实时动态计算微波基站瞄准无人机飞行区域云台转动角度。
附图说明
16.图1是本发明的系统连接框图;图2是本发明的工作流程图;
图3是本发明的系统示意图;图4是本发明的云台单元与无人机通信示意图。
具体实施方式
17.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式。
18.为解决现有技术中无人机巡检存在的视频画质不高,延时较大,且输电线路大多分布在地广人稀的地方,存在无线网络信号不稳定的问题,本发明提出一种基于北斗差分定位的无人机跟瞄通信系统及方法,通过北斗差分定位原理,实时获取无人机和跟瞄系统精确gps坐标,无人机通过rf通信与跟瞄系统共享坐标位置。
19.建立跟瞄系统工作坐标系,将无人机实时gps位置坐标转换为跟瞄系统工作坐标系中坐标,计算云台单元微波基站瞄准无人机飞行区域,云台需转动的角度,并实时调整云台姿态,实现微波基站对无人机飞行区域的定向信号覆盖,实现无线宽带信号的实时跟瞄和提供。
20.本发明公开了一种基于北斗差分定位的无人机跟瞄通信系统,包括主机单元、电源系统和云台单元;所述主机单元分别与所述电源系统和所述云台单元相连接;所述主机单元包括主控模块、光纤通信单元、数传电台和rf模块,光纤通信单元通过网口与主控模块相连接,数传电台和rf模块分别通过串口与主控模块相连接;所述电源系统包括充电控制器、太阳能板和蓄电池,太阳能板和蓄电池分别与充电控制器相连接;所述云台单元包括云台系统、北斗差分定位模块和微波基站,微波基站通过网线与云台系统连接,北斗差分定位模块通过串口与云台系统连接。
21.所述主机单元还包括5g通信单元,5g通信单元通过usb 接口与主控模块连接。
22.一种基于北斗差分定位的无人机跟瞄通信方法,包括以下具体步骤:步骤一:建立跟瞄系统工作坐标系;步骤二:基于北斗差分定位原理,计算云台单元精确位置坐标,再由主控模块计算出云台单元地理位置信息到工作坐标系的转换矩阵;步骤三:将无人机实时地理位置信息转换为跟瞄系统工作坐标系中的工作坐标信息;步骤四:由主控模块根据无人机实时工作坐标信息,计算微波基站瞄准无人机飞行区域转动数据,并通过网络控制云台系统转动,实时动态调整云台系统姿态;步骤五:无人机通过跟瞄系统提供的无线宽带网络覆盖将高清实时视频回传给跟瞄系统主机单元,跟瞄系统主机单元回传到无人机后台。
23.所述步骤一具体包括:以云台单元坐标位置作为坐标原点(0,0,0),以正北方向为y轴,正东方向为x轴,z轴符合“左手坐标系法则”,建立工作坐标系。
24.所述步骤二具体包括:跟瞄系统通过北斗差分定位模块获取云台单元的地理位置信息,并通过数传电台从位置服务商获取该区域的高精度定位差分数据,利用差分数据修正解算获取的地理位置信息,得到云台单元的高精度位置信息,再由主控模块计算出云台单元地理位置信息到工作坐标系的转换矩阵。
25.所述地理位置信息包括经度、纬度和高程坐标。
26.所述步骤三具体包括:无人机通过自带的北斗差分定位模块,实时获取无人机的地理位置信息,并通过rf模块从跟瞄系统主控模块获取差分定位数据,通过修正解算得到无人机的高精度地理位置信息,代入转换矩阵,得到无人机在跟瞄系统工作坐标系中的工作坐标信息。
27.跟瞄系统与无人机通信共有两个无线通道:一、无线rf窄带数据传输通道,用于跟瞄控制单元与无人机之间的位置信息交互、差分数据交互和无人机控制信令传输;二、微波无线宽带传输通道,用于传输实时高清视频和图像数据。
28.为保证跟瞄系统的超低功耗运行,在无人机没有作业时,微波无线宽带传输通道关闭,rf窄带数据传输通道常开,在无人机启动作业时,通过rf窄带数据传输通道通知跟瞄系统开启微波无线宽带传输通道。rf窄带数据传输通道采用全向天线,微波无线宽带传输通道采用定向天线,定向瞄准。
29.通过调整云台单元云台水平角度和俯仰角度实现微波基站对无人机飞行区域无线信号的定向瞄准覆盖。
30.实施例1如图1所示,一种基于北斗差分定位的无人机跟瞄通信系统,包括主机单元、电源系统和云台单元;所述主机单元分别与所述电源系统和所述云台单元相连接;所述主机单元包括主控模块、光纤通信单元、数传电台和rf模块,光纤通信单元通过网口与主控模块相连接,数传电台和rf模块分别通过串口与主控模块相连接;所述电源系统包括充电控制器、太阳能板和蓄电池,太阳能板和蓄电池分别与充电控制器相连接;所述云台单元包括云台系统、北斗差分定位模块和微波基站,微波基站通过网线与云台系统连接,北斗差分定位模块通过串口与云台系统连接。
31.如图2所示,一种基于北斗差分定位的无人机跟瞄通信方法,包括以下具体步骤:步骤一:建立跟瞄系统工作坐标系;步骤二:基于北斗差分定位原理,计算云台单元精确位置坐标,再由主控模块计算出云台单元地理位置信息到工作坐标系的转换矩阵;步骤三:将无人机实时地理位置信息转换为跟瞄系统工作坐标系中的工作坐标信息;步骤四:由主控模块根据无人机实时工作坐标信息,计算微波基站瞄准无人机飞行区域转动数据,并通过网络控制云台系统转动,实时动态调整云台系统姿态;步骤五:无人机通过跟瞄系统提供的无线宽带网络覆盖将高清实时视频回传给跟瞄系统主机单元,跟瞄系统主机单元再通过光纤通信单元回传到无人机后台。
32.所述步骤一具体包括:以云台单元坐标位置作为坐标原点(0,0,0),以正北方向为y轴,正东方向为x轴,z轴符合“左手坐标系法则”,建立工作坐标系。
33.所述步骤二具体包括:跟瞄系统通过北斗差分定位模块获取云台单元的地理位置信息,并通过数传电台从位置服务商获取该区域的高精度定位差分数据,利用差分数据修正解算获取的地理位置信息,得到云台单元的高精度位置信息,再由主控模块计算出云台单元地理位置信息到工作坐标系的转换矩阵。
34.所述地理位置信息包括经度、纬度和高程坐标。
35.所述步骤三具体包括:无人机通过自带的北斗差分定位模块,实时获取无人机的地理位置信息,并通过rf模块从跟瞄系统主控模块获取差分定位数据,通过修正解算得到无人机的高精度地理位置信息,代入转换矩阵,得到无人机在跟瞄系统工作坐标系中的工作坐标信息。
36.跟瞄系统与无人机通信共有两个无线通道:一、无线rf窄带数据传输通道,用于跟瞄控制单元与无人机之间的位置信息交互、差分数据交互和无人机控制信令传输;二、微波无线宽带传输通道,用于传输实时高清视频和图像数据。
37.为保证跟瞄系统的超低功耗运行,在无人机没有作业时,微波无线宽带传输通道关闭,rf窄带数据传输通道常开,在无人机启动作业时,通过rf窄带数据传输通道通知跟瞄系统开启微波无线宽带传输通道。rf窄带数据传输通道采用全向天线,微波无线宽带传输通道采用定向天线,定向瞄准。
38.通过调整云台单元云台水平角度和俯仰角度实现微波基站对无人机飞行区域无线信号的定向瞄准覆盖。
39.本实施例跟瞄系统回传到后台服务器网络方案采用opgw 光纤有线传输,稳定可靠。基于北斗差分定位方法,获取跟瞄系统和跟瞄目标(无人机)的精确地理位置信息;建立跟瞄系统工作坐标系,将无人机地理位置转换成工作坐标系中的坐标位置,实时动态计算微波基站瞄准无人机飞行区域云台转动角度;基于信号实时跟瞄的原理,实现对无人机飞行区域的定向无线宽带信号覆盖,实现无人机高清视频的实时回传;基于宽窄带通信融合技术,窄带作为信令通道和位置信息传输通道,宽带作为高清视频实时回传通道。
40.实施例2一种基于北斗差分定位的无人机跟瞄通信方法,包括以下具体步骤:步骤一:建立跟瞄系统工作坐标系;步骤二:基于北斗差分定位原理,计算云台单元精确位置坐标,再由主控模块计算出云台单元地理位置信息到工作坐标系的转换矩阵;步骤三:将无人机实时地理位置信息转换为跟瞄系统工作坐标系中的工作坐标信息;步骤四:由主控模块根据无人机实时工作坐标信息,计算微波基站瞄准无人机飞行区域转动数据,并通过网络控制云台系统转动,实时动态调整云台系统姿态;步骤五:无人机通过跟瞄系统提供的无线宽带网络覆盖将高清实时视频回传给跟瞄系统主机单元,跟瞄系统主机单元再通过5g通信单元回传到无人机后台。
41.本实施例跟瞄系统回传到后台服务器网络方案采用5g通信单元传输,传输带宽高,可靠性高。
42.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护的范围由所附权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。