基于分数阶pid控制的三相电网锁相环及其锁相方法
技术领域
1.本发明涉及电网电压的滤波器技术领域,尤其涉及一种基于分数阶pid控制的三相电网锁相环及其锁相方法。
背景技术:
2.在并网的电力电子设备和可再生能源发电系统的应用场合中,同步坐标系锁相环(srf
‑
pll)是应用最广泛的锁相技术,但是,基于pid控制的传统同步坐标系锁相环对电网电压中的负序分量或者谐波畸变敏感,锁频和锁相效果恶化,一般只适用于三相电网电压平衡、电网谐波相对较小时的相位测量。由于负序分量和电网电压谐波分量经过park变换后将分别产生2次谐波和
±
6k(k=1,2,
…
)次谐波作用于srf
‑
pll,因此可针对各次谐波设计相应的陷波器以抑制引入的相应谐波,能够提高其锁频和锁相的效果,其中,滑动平均滤波器(maf)是一种设计简单、锁相准确的线性相位滤波器,其滤波特性包含多个陷波器串联的效果。然而,maf会降低闭环系统的相位裕度,从而限制其动态性能。采用传统相位超前环节或微分项进行相位补偿能够改善maf
‑
pll的动态性能,但是该方法会牺牲锁相环的谐波抑制能力。
3.综上,行业内急需研发一种提高开环截止频率和相位裕度,保证了锁相环谐波抑制的滤波器。
技术实现要素:
4.本发明的目的是为了克服以上现有技术存在的不足,提供了一种具有很好的频率适应能力和锁相效果的基于分数阶pid控制的三相电网锁相环及其锁相方法。
5.一种基于分数阶pid控制的三相电网锁相环,包括坐标变换模块、滑动平均滤波器模块、算术平均值滤波器模块、分数阶pid模块和电角度转换模块:所述坐标变换模块的输入端连接三相电压输入端和电角度转换模块的输出端;所述滑动平均滤波器模块包括d轴maf模块和q轴maf模块;所述q轴maf模块的输入端连接所述坐标变换模块的电网q轴电压输出端u
q
、电网q轴电压设定端和算术平均值滤波器模块的输出端,所述q轴maf模块的输出端连接分数阶pid模块的输入端;所述d轴maf模块的输入端连接所述坐标变换模块的电网d轴电压输出端,所述d轴maf模块的输出端连接算术平均值滤波器模块的第一输入端;所述算术平均值滤波器模块的第二输入端连接分数阶pid模块的输出端;分数阶pid模块的输出端还连接电角度转换模块的输入端。
6.优选地,所述分数阶pid模块包括比例单元、积分单元、分数阶微分单元和第一加法器;比例单元的输入端、积分单元的输入端、分数阶微分单元的输入端均连接q轴maf模块的输出端,比例单元的输出端、积分单元的输出端、分数阶微分单元的输出端通过第一加法器连接至电角度转换模块、算术平均值滤波器模块。
7.一种基于分数阶pid控制的三相电网锁相环的锁相方法包括如下步骤:
8.步骤1,将三相电源相电压u
a
、u
b
、u
c
和电角度转换模块输出的电角度输入坐标变
换模块,坐标变换模块计算得到两相旋转电压u
d
、u
q
,将旋转电压u
q
与u*q=0相减后输入至q轴maf模块,旋转电压u
d
输送至d轴maf模块;
9.步骤2,d轴maf模块对旋转电压u
d
进行滤波,输出电压u’d至算术平均值滤波器模块,q轴maf模块根据算术平均值滤波器模块的输出值和d轴maf模块的输出值更新陷波频率,再对输入误差u*q
‑
u
q
进行滤波;
10.步骤3,在稳态工作点附近对锁相环进行线性化处理,再计算锁相环的开环传递函数和设定分数阶pid参数,从而根据q轴maf的输出值更新分数阶pid模块输出的角频率变化量;
11.步骤4,电角度变换模块将分数阶pid模块输出的角频率变化量转换为电角度并用于步骤1的坐标变换或者其他需要用到电网锁相参量的控制器当中,实现三相电网电压锁相环的输出控制。
12.优选地,步骤1具体为:
13.基于等幅值原则,对采样的三相电源相电压u
a
、u
b
、u
c
进行clark变换,其变换式如下式子所示:
[0014][0015]
其中,u
α
、u
β
、u0是两相静止坐标系下的电压变量,u
a
、u
b
、u
c
是三相电源相电压,θ是电网电压矢量的实际电角度;
[0016]
再对u
α
、u
β
进行park变换,其变换式如下式子所示:
[0017][0018]
其中,代表电角度转换模块输出的估计角度;由式(1)、(2)可得
[0019][0020]
其中,u
d
、u
q
是两相旋转坐标系下的电压变量,u
p
是电网相电压的幅值,当锁相环的输出估计角度与电网电压矢量的实际角度θ相等时,将三相电网基波正弦变量u
a
、u
b
、u
c
转换成直流的两相旋转电压u
d
、u
q
。
[0021]
优选地,步骤2还包括:根据锁相环当前状态,算术平均值滤波器模块进行变量更新,具体为:对d轴maf模块输出的电网d轴电压u'd进行连续采样l次,当连续采集到l/3个差值在预设阈值m内的样点时,判断到闭环系统进入稳态,算术平均值滤波器模块进行频率更新操作;
[0022]
当闭环系统处于稳态时,算术平均值滤波器模块对采集到的角频率变化进行算术平均滤波处理:
[0023][0024]
其中,n为滤波长度,取值大小与锁相带宽和频率更新速度有关,是分数阶pid模块在第k拍输出的角频率变化量,算术平均值滤波器模块输出估计当前角频率ω'0为:
[0025][0026]
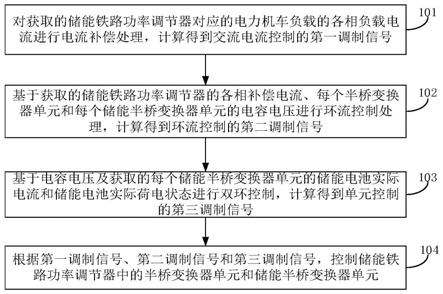
优选地,步骤2中的q轴maf模块先根据算术平均值滤波器模块的输出值和d轴maf模块的输出值更新陷波频率具体为:q轴maf模块通过muan输出的角频率估计值ω'0更新当前q轴maf的陷波频率f
q
:
[0027]
f
q
=ω'0/(2π)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0028]
其中,ω'0是算术平均值滤波器模块的输出量。
[0029]
优选地,步骤3具体为:
[0030]
在稳态工作点附近,式子(3)线性化为
[0031][0032]
假设电网工作稳定于50hz频率,则频率自适应通道视为开路,其中,g
f
(s)=g
fq
(s),分数阶pid的传递函数为
[0033][0034]
其中,k
p
、k
i
、k
d
分别为分数阶pid模块的比例、积分和微分系数;λ∈[0,1],s
λ
是分数阶微分环节;
[0035]
开环传递函数g
o
(s)和扰动传递函数g
d
(s)分别为:
[0036]
g0(s)=u
p
g
c
(s)g
f
(s)/s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0037]
g
d
(s)=g
c
(s)g
f
(s)/[s(1 g0(s))]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0038]
其中,在预设相位裕度和开环截止频率ω
c
的条件下,控制器g
c
(s)满足以下幅频特性、相频特性:
[0039]
|u
p
g
c
(jω
c
)g
f
(jω
c
)/(jω
c
)|=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0040][0041]
此外,考虑到ω
c
附近相频特性的增益鲁棒性和抗扰性能,定义如下性能指标:
[0042][0043][0044]
其中,y为谐波d扰动单独作用下系统的输出;t为积分时间,其数值需要大于响应时间并留有一定的裕度,以确保系统进入稳态;
[0045]
在预设相位裕度开环截止频率ω
c
和计算当前扰动指标ζ之后,得到最优的k
p
、k
i
、k
d
和λ,然后分数阶pid模块通过式(10)和q轴maf模块的输出量计算角频率变化量
[0046]
优选地,步骤4具体为:
[0047]
前馈单元通过分数阶pid模块输出的角频率变化量计算角频率
其中,ω
base
=100π;
[0048]
积分器将角频率转换为电角度
[0049]
取余单元对电角度进行标幺化处理,输出一个在0~2π范围内的电角度
[0050]
有益效果:
[0051]
本发明可以适用各种三相不平衡和谐波畸变的复杂工况,具有很好的频率适应能力和锁相效果;
[0052]
(1)本发明通过采用分数阶pid(分数阶pid模块)补偿maf(滑动平均滤波器模块)引入的相位滞后,提高了开环截止频率和相位裕度,且分数阶微分项可以增加微分环节的自由度,在一定程度上保证了锁相环谐波抑制效果。
[0053]
(2)本发明将fopid模块(分数阶pid模块)放在maf模块后,利用其超前特性能够有效地提高频率修正后锁相环的响应速度。
[0054]
(3)本发明采用算术平均值滤波器判断系统工作状态,避免过渡过程更新参数导致的不稳定问题,且对角频率变化量进行滤波提取,减小了随机干扰误差。
[0055]
(4)本发明将fopid输出的频率变化量反馈到其中的maf结构可实现频率的自适应调节,具有很好的频率适应能力,使得锁相环能够在电网频率波动时仍然具有较高的锁频和锁相精度。
[0056]
(5)本发明通过电角度转换模块通过对角度积分输出进行标幺化,解决了积分环节存在的数据溢出和精度丢失问题。
[0057]
(6)本发明采用d轴maf模块提取电网电压正序分量,既为mean模块(算术平均值滤波器模块)判断系统状态提供准确的数据点,也为外部孤岛检测提供数据接口。
附图说明
[0058]
图1为本发明的基于分数阶pid控制的三相电网锁相环的结构图;
[0059]
图2是本发明所提出的基于分数阶pid控制的三相电网锁相环的等效结构图;
[0060]
图3(a)是传统基于maf的锁相环和本发明所提出的锁相环的提取的相位误差仿真波形图。
[0061]
图3(b)是传统基于maf的锁相环和本发明所提出的锁相环的估计频率仿真波形图。
[0062]
其中,三相电网电压在0~0.05s时段正常运行,在0.05s时刻使三相电压的频率同时增加3hz,随后在0.25s时刻进入谐波畸变以及不平衡的状态。
具体实施方式
[0063]
下面结合附图和实施例对本发明作进一步说明。
[0064]
本发明一种基于分数阶pid控制的三相电网锁相环的锁相方法,其特征在于,包括坐标变换模块、滑动平均滤波器模块(maf)、算术平均值滤波器模块(mean)、分数阶pid模块(fopid)、电角度转换模块:
[0065]
所述坐标变换模块用于将三相输入电压量转换为两相旋转电压量;所述坐标变换模块的输入量是电角度转换模块输出的电角度和三相输入电压量,输出量是电网d轴电压
的实时值、电网q轴电压的实时值;
[0066]
所述滑动平均滤波器模块可为前向通道提供多个串联陷波器;所述滑动平均滤波器模块包括d轴maf模块和q轴maf模块;所述q轴maf模块的输入端接收电网q轴电压的给定值u*q、电网q轴电压的实时值以及算术平均值滤波器模块的输出,其输出端输出至分数阶pid模块;所述d轴maf模块的输入端接收坐标模块输出的电网d轴检测电压,其输出端输出至算术平均值滤波器模块;
[0067]
所述分数阶pid模块用于改善闭环系统(三相电网锁相环)的动静态特性;所述分数阶pid模块的输入端接收q轴滑动平均滤波器模块的输出,其输出端输出角频率变化量;
[0068]
所述算术平均值滤波器模块用于反馈当前电网频率波动;所述算术平均值滤波器模块的输入端接收分数阶pid模块输出的角频率变化量和d轴maf模块输出的电网d轴电压,其输出端输出至q轴滑动平均滤波器模块;
[0069]
所述电角度转换模块用于将当前角频率变化量转换为电角度;包括前馈单元、积分器和取余单元mod;所述前馈单元输入端接收估计角频率变化量和角频率基值,其输出量输送至积分器的输入端;所述积分器的输入端接收当前估计角频率,其输出端输出累计电角度;所述取余单元mod的输入端接收累计电角度,其输出端输出标幺电角度。
[0070]
所述滑动平均滤波器模块可用于整数倍电网基频处的滤波。
[0071]
所述滑动平均滤波器模块参数t可在线调整以适应电网频率波动。
[0072]
所述d轴滑动平均滤波器模块可提取电网电压正序分量,为孤岛检测提供接口。
[0073]
所述分数阶pid模块中的分数阶微分项可补偿滑动平均滤波器模块引入的相位滞后。
[0074]
所述分数阶pid模块中的分数阶微分项的参数调整具有两个自由度。
[0075]
所述算术平均值滤波器模块用于过滤角频率变化量中的高频量。所述算术平均值滤波器模块包括更新判断模块和更新值计算模块;所述更新判断模块的输入端与d轴maf模块的输出端相连,所述更新判断模块的输出端与更新值计算模块的第一输入端连接,更新值计算模块的第二输入端与分数阶pid模块的输出端相连,更新值计算模块的输出端与q轴maf模块的输入端连接。
[0076]
所述算术平均值滤波器模块通过判断锁相环当前的工作状态调整更新过程。
[0077]
所述电角度转换模块对累积电角度进行标幺化处理。所述电角度转换模块包括依次连接的前馈单元、积分器和取余单元mod;所述前馈单元的输入端连接分数阶pid模块的输出端,所述取余单元mod的输出端连接所述坐标变换模块的输入端。
[0078]
上述基于分数阶pid控制的三相电网锁相环的锁相方法,包括如下步骤:
[0079]
步骤1,将三相电源相电压u
a
、u
b
、u
c
和电角度转换模块输出的电角度输入坐标变换模块,坐标变换模块计算得到两相旋转电压u
d
、u
q
,将旋转电压u
q
与u*q=0相减后输入至q轴maf模块,旋转电压u
d
输送至d轴maf模块;步骤1具体为:
[0080]
基于等幅值原则,对采样的三相电源相电压u
a
、u
b
、u
c
进行clark变换,其变换式如下式子所示:
[0081][0082]
其中,u
α
、u
β
、u0是两相静止坐标系下的电压变量,u
a
、u
b
、u
c
是三相电源相电压,θ是电网电压矢量的实际电角度;
[0083]
再对u
α
、u
β
进行park变换,其变换式如下式子所示:
[0084][0085]
其中,代表电角度转换模块输出的估计角度;由式(1)、(2)可得
[0086][0087]
其中,u
d
、u
q
是两相旋转坐标系下的电压变量,u
p
是电网相电压的幅值,当锁相环的输出估计角度与电网电压矢量的实际角度θ相等时,将三相电网基波正弦变量u
a
、u
b
、u
c
转换成直流的两相旋转电压u
d
,u
q
。
[0088]
步骤2,d轴maf模块对旋转电压u
d
进行滤波,输出电压u'd至算术平均值滤波器模块,q轴maf模块根据算术平均值滤波器模块的输出值和d轴maf模块的输出值更新陷波频率,再对输入误差u*q
‑
u
q
进行滤波;步骤2还包括:
[0089]
d轴maf模块的传递函数g
fd
(s)表达式如下:
[0090][0091]
其中,t
d
=1/f
d0
为待设计的时间常数,f
d0
的选取一般可根据所需要抑制谐波信号的基频,通常由于作用于srf
‑
pll的电网谐波分量主要是2次谐波和
±
6k(k=1,2,
…
)次谐波,故一般可设f
d0
=f0=100hz。由于纯滞后项的存在,d轴maf具有时长为t
d
的过渡过程。d轴maf在整数倍频率f
d0
处具有陷波特性,通过d轴maf模块对e
d
进行滤波,可输出稳定的e'd供孤岛检测使用。
[0092]
mean模块如果在锁相环过渡过程中更新频率可能会导致系统不稳定且对maf谐波抑制性能的提升影响不大,因此,mean中通常还需要引入工作状态判断过程:设定一个采样点数l和阈值m,一般而言,l的选取需要权衡频率更新速度和判断准确度,m的选取一般需要大于电网d轴电压e'd稳态波动时的峰峰值,对maf模块输出的电网d轴电压e'd进行连续采样l次,当连续采集到l/3个差值在m以内的样点时,可判断到系统进入了稳态,进行频率更新操作,否则,判断到系统处于过渡过程,不进行频率更新操作。
[0093]
又由于实际的电网频率存在高频且幅值较小的频率波动,当闭环系统处于稳态时,mean模块还需要对采集到的进行算术平均滤波处理:
[0094][0095]
其中,n为滤波长度,取值大小与锁相带宽和频率更新速度有关,可取n=100;是fopid模块在第k拍输出的角频率变化量,可估计当前角频率ω'0为:
[0096][0097]
q轴maf模块的传递函数表达式g
f
(s)如下
[0098][0099]
其中,t
q
=1/f
q
为待设计的时间常数,f
q0
的选取一般可根据所需要抑制谐波信号的基频,通常由于作用于srf
‑
pll的电网谐波分量主要是2次谐波和
±
6k(k=1,2,
…
)次谐波,故一般可设fq=f0=100hz。由于纯滞后项的存在,q轴maf具有时长为t
q
的过渡过程。q轴maf在整数倍频率f
q0
处具有很好的陷波特性,但是,当电网基波的工作频率不等于50hz,此时f
q
也需要做相应的改变,可通过mean输出的角频率估计值ω'0来更新当前q轴maf的陷波频率f
q
,可令
[0100]
f
q
=ω'0/(2π)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0101]
其中,ω'0是mean的输出量。
[0102]
步骤3,先在稳态工作点附近对锁相环进行线性化处理,再计算开环传递函数和设定分数阶pid参数,从而可以根据q轴maf的输出值更新fopid输出的角频率变化量;
[0103]
本发明的锁相环控制框图如图1所示,由式子(3)可知当u
q
=0时可实现频率、相位的完全锁定,则在稳态工作点附近,式子(3)线性化为
[0104][0105]
假设电网工作稳定于50hz频率,则频率自适应通道视为开路,其中,g
f
(s)=g
fq
(s),分数阶pid的传递函数为
[0106][0107]
其中,k
p
、k
i
、k
d
分别为分数阶pid模块的比例、积分和微分系数;λ∈[0,1],s
λ
是分数阶微分环节;
[0108]
开环传递函数g
o
(s)和扰动传递函数g
d
(s)分别为:
[0109]
g0(s)=u
p
g
c
(s)g
f
(s)/s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0110]
g
d
(s)=g
c
(s)g
f
(s)/[s(1 g0(s))]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0111]
其中,在预设相位裕度和开环截止频率ω
c
的条件下,控制器g
c
(s)满足以下幅频特性、相频特性:
[0112]
|u
p
g
c
(jω
c
)g
f
(jω
c
)/(jω
c
)|=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0113][0114]
此外,考虑到ω
c
附近相频特性的增益鲁棒性和抗扰性能,定义如下性能指标:
[0115][0116][0117]
其中,y为谐波d扰动单独作用下系统的输出;t为积分时间,其数值需要大于响应时间并留有一定的裕度,以确保系统进入稳态;
[0118]
在预设相位裕度开环截止频率ω
c
和计算当前扰动指标ζ之后,得到最优的k
p
、k
i
、k
d
和λ,然后分数阶pid模块通过式(10)和q轴maf模块的输出量计算角频率变化量
[0119]
步骤4,电角度变换模块将分数阶pid模块输出的角频率变化量转换为电角度并用于步骤1的坐标变换或者其他需要用到电网锁相参量的控制器当中,比如输出电角度供电流环、电压环等其他需要用到电网锁相的模块,最终实现三相电网电压锁相环的输出控制。步骤4具体为:
[0120]
前馈单元通过分数阶pid模块输出的角频率变化量计算角频率能加快锁相环的锁相速度。其中,ω
base
=100π;
[0121]
积分器将角频率转换为电角度
[0122]
取余单元对电角度进行标幺化处理,输出一个在0~2π范围内的电角度
[0123]
综上,本发明通过引入具有两个参数自由度的分数阶微分项,能在尽可能保证锁相环谐波抑制效果的前提下,补偿maf引起的相位滞后,实现对三相电网电压频率以及相位的准确且快速的跟随;将fopid模块放在maf模块后,利用其超前特性能够有效地提高频率修正后锁相环的响应速度。引入的mean模块可根据锁相环当前工作状态,过滤并提取估计角频率变化量,由此更新maf时间常数t,解决了电网频率变化导致maf陷波效果变差的问题,使得锁相环能够在电网频率波动时仍然具有较高的锁频和锁相精度。采用d轴maf模块提取电网电压正序分量,既为mean模块判断系统状态提供准确的数据点,也为外部孤岛检测提供数据接口。电角度转换模块通过对角度积分输出进行标幺化,解决了积分环节存在的数据溢出和精度丢失问题。
[0124]
按照上述实施例,便可以很好地实现本发明。值得说明的是,上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。