1.本技术涉及激光雷达技术领域,具体是激光雷达收发视场自准直调节算法。
背景技术:
2.激光雷达收发同轴的使用场景中,经常遇到收发出现失调的情况。现有技术中,针对失调的雷达,一方面需要人工参与判断失调情况,另一方面需要能够接触到雷达,当雷达在野外工作时,提高了调节的难度和降低了实现实时调节雷达的可能性。因此,亟需一种雷达自动调节方法来解决这一问题。
技术实现要素:
3.本技术的目的在于提供激光雷达收发视场自准直调节算法,实现激光雷达自动调节的功能,从而在出现失调的场景下进行自动调节,确保雷达有效的工作。
4.为实现上述目的,本技术提供了激光雷达收发视场自准直调节算法,包括以下步骤:
5.信号数据采集,通过收发信号同轴的激光雷达实时接收信号;
6.数据失调分析,判断当前收发信号是否失调,是则进入下一步骤,否则持续读取所述信号数据采集的信号;
7.指令调节,当当前收发信号失调时,发送指令至电动调整架进行调节,调节完成后返回所述信号数据采集,所述激光雷达安装于所述电动调整架上。
8.作为优选,所述数据失调分析具体包括以下步骤:
9.s1:获取收发同轴激光雷达的原始信号数据组a,所述原始信号数据组a包括n条数据,具体为a1、a2、a3、a4
……
an;
10.s2:对所述原始信号数据组a进行滑动平均,以m条数据为滑动数,即第x、x 1、x 2
……
x m的平均数作为新的信号数据数组b中第x位的数据,获取信号数据组b,所述信号数据组b包括n条数据,具体为b1、b2、b3
……
bn;
11.s3:计算所述信号数据组b中各个数据的斜率lx,其中x为数据在坐标轴中对应的x轴参数、y为数据在坐标轴中对应的y轴参数,获取斜率组l,所述斜率组l包括n条数据,具体为l1、l2、l3
……
ln;
12.s4:从所述斜率组l中的第0位开始计数,查看是否有斜率大于0的数据;
13.s5:当没有斜率大于0的数据出现,进入s6,否则进入s7;
14.s6:输出严重失调;
15.s7:对斜率大于0的数据进行计数d1,并计算斜率小于0的个数d2,计算探测距离有效数d,d=d1 d2;
16.s8:将探测距离有效数d与雷达初始调测后最大的探测距离有效数d进行对比,当时,进入s9;当时,进入s10;否则进入s11;
17.s9:输出中度失调;
18.s10:输出轻微失调;
19.s11:未失调。
20.作为优选,所述指令调节具体包括以下步骤:
21.s12:获取所述s6和所述s8的结果;当输出严重失调进入s13,当输出中度失调进入s21,当输出轻度失调进入s29,当输出未失调进入s37;
22.s13:判断是否有指令发送记录,无指令发送记录时进入s14,有指令发送记录时进入s16;
23.s14:自动发送指令至所述电动调整架进行调整,方向为正向,步长h=2r,其中,r为圆孔半径;
24.s15:添加或更新调试记录,进入s39;
25.s16:判断调试方向,为正向调试时进入s17,为反向调试时进入s19;
26.s17:自动发送指令至所述电动调整架进行调整,方向为反向,步长h=p,其中p为记录中的步长;
27.s18:添加或更新调试记录,进入s39;
28.s19:自动发送指令至所述电动调整架进行调整,方向为正向,步长h=p r;
29.s20:添加或更新调试记录,进入s39;
30.s21:判断是否有指令发送记录,无指令发送记录时进入s22,有指令发送记录时进入s24;
31.s22:自动发送指令至所述电动调整架进行调整,方向为正向,步长h=r;
32.s23:添加或更新调试记录,进入s39;
33.s24:判断调试方向,为正向调试时进入s25,为反向调试时进入s27;
34.s25:自动发送指令至所述电动调整架进行调整,方向为反向,步长h=p;
35.s26:添加或更新调试记录,进入s39;
36.s27:自动发送指令至所述电动调整架进行调整,方向为正向,步长
37.s28:添加或更新调试记录,进入s39;
38.s29:判断是否有指令发送记录,无指令发送记录时进入s30,有指令发送记录时进入s32;
39.s30:自动发送指令至所述电动调整架进行调整,方向为正向,步长
40.s31:添加或更新调试记录,进入s39;
41.s32:判断调试方向,为正向调试时进入s33,为反向调试时进入s35;
42.s33:自动发送指令所述电动调整架进行调整,方向为反向,步长h=p;
43.s34:添加或更新调试记录,进入s39;
44.s35:自动发送指令进行调整,方向为正向,步长
45.s36:添加或更新调试记录,进入s39;
46.s37:判断是否有指令发送记录,有指令发送记录时进入s38,无指令发送记录时进入s39;
47.s38:清除调试记录,进入s39;
48.s39:结束本次指令调试,等待数据失调分析结果。
49.有益效果:本技术的激光雷达收发视场自准直调节算法,通过对激光雷达接收的信号进行数据失调分析获取当前雷达是否存在信号失调状况,在出现了收发信号失调的问题时,根据失调情况发送响应的控制指令至电动调整架,电动调整架带动激光雷达进行调节,实现激光雷达自动调节的功能,从而在出现失调的场景下进行自动调节,确保雷达有效的工作。
附图说明
50.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
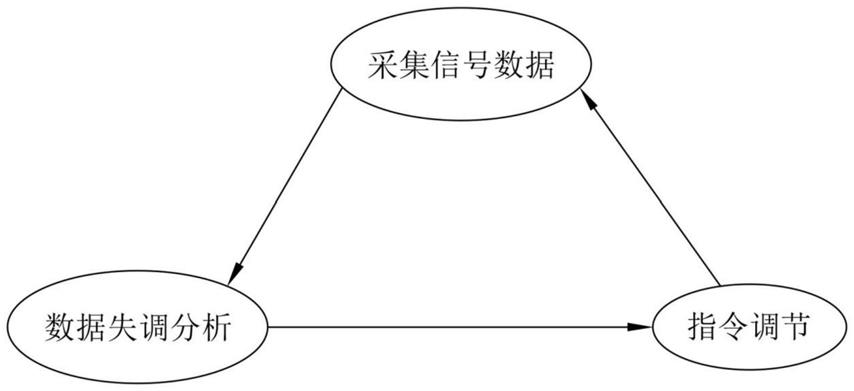
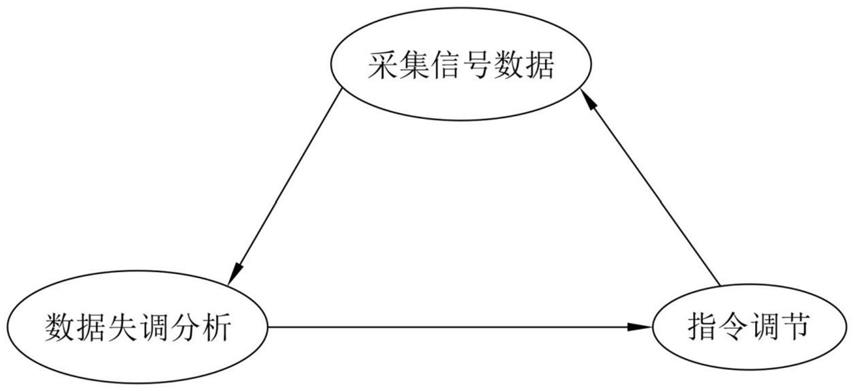
51.图1为本技术实施例中激光雷达收发视场自准直调节算法的结构框图;
52.图2为本技术实施例中数据失调分析的步骤流程示意图;
53.图3为本技术实施例中指令调节的步骤流程示意图。
具体实施方式
54.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.实施例1:参考图1所示的激光雷达收发视场自准直调节算法,包括信号数据采集、数据失调分析、指令调节,信号数据采集、数据失调分析、指令调节相互依赖循环。具体来说,信号数据采集具体用于通过收发信号同轴的激光雷达实时接收信号。数据失调分析具体用于判断当前收发信号是否失调,是则进入下一步骤,否则持续读取所述信号数据采集的信号。指令调节具体用于当当前收发信号失调时,发送指令至电动调整架进行调节,调节完成后返回所述信号数据采集,所述激光雷达安装于所述电动调整架上。在本实施例中,电动调整架可以是现有技术中的任意一种,其用于接收指令并根据指令中的步长要求相应的调整激光雷达的转动角度。
56.基于上述,利用收发信号同轴的激光雷达的接收信号,分析判断当前收发信号是否失调,在出现失调的情况下,发送指令至电动调整架对激光雷达进行调节,调节完毕后,再对接收信息进行判断,从而实现收发同轴的激光雷达在自身失调的情况下,能够自我完成调节并恢复雷达正常工作。
57.在本实施例中,参考图2所示,所述数据失调分析具体包括以下步骤:
58.s1:获取收发同轴激光雷达的原始信号数据组a,所述原始信号数据组a包括n条数据,具体为a1、a2、a3、a4
……
an;
59.s2:对所述原始信号数据组a进行滑动平均,以m条数据为滑动数,即第x、x 1、x 2
……
x m的平均数作为新的信号数据数组b中第x位的数据,获取信号数据组b,所述信号数
据组b包括n条数据,具体为b1、b2、b3
……
bn;
60.s3:计算所述信号数据组b中各个数据的斜率lx,其中x为数据在坐标轴中对应的x轴参数、y为数据在坐标轴中对应的y轴参数,获取斜率组l,所述斜率组l包括n条数据,具体为l1、l2、l3
……
ln;
61.s4:从所述斜率组l中的第0位开始计数,查看是否有斜率大于0的数据;
62.s5:当没有斜率大于0的数据出现,进入s6,否则进入s7;
63.s6:输出严重失调;
64.s7:对斜率大于0的数据进行计数d1,并计算斜率小于0的个数d2,计算探测距离有效数d,d=d1 d2;
65.s8:将探测距离有效数d与雷达初始调测后最大的探测距离有效数d进行对比,当时,进入s9;当时,进入s10;否则进入s11;
66.s9:输出中度失调;
67.s10:输出轻微失调;
68.s11:未失调。
69.基于上述的数据失调分析步骤,参考图3所示,本实施例中记载的指令调节具体包括以下步骤:
70.s12:获取所述s6和所述s8的结果;当输出严重失调进入s13,当输出中度失调进入s21,当输出轻度失调进入s29,当输出未失调进入s37;
71.s13:判断是否有指令发送记录,无指令发送记录时进入s14,有指令发送记录时进入s16;
72.s14:自动发送指令至所述电动调整架进行调整,方向为正向,步长h=2r,其中,r为圆孔半径;
73.s15:添加或更新调试记录,进入s39;
74.s16:判断调试方向,为正向调试时进入s17,为反向调试时进入s19;
75.s17:自动发送指令至所述电动调整架进行调整,方向为反向,步长h=p,其中p为记录中的步长;
76.s18:添加或更新调试记录,进入s39;
77.s19:自动发送指令至所述电动调整架进行调整,方向为正向,步长h=p r;
78.s20:添加或更新调试记录,进入s39;
79.s21:判断是否有指令发送记录,无指令发送记录时进入s22,有指令发送记录时进入s24;
80.s22:自动发送指令至所述电动调整架进行调整,方向为正向,步长h=r;
81.s23:添加或更新调试记录,进入s39;
82.s24:判断调试方向,为正向调试时进入s25,为反向调试时进入s27;
83.s25:自动发送指令至所述电动调整架进行调整,方向为反向,步长h=p;
84.s26:添加或更新调试记录,进入s39;
85.s27:自动发送指令至所述电动调整架进行调整,方向为正向,步长
86.s28:添加或更新调试记录,进入s39;
87.s29:判断是否有指令发送记录,无指令发送记录时进入s30,有指令发送记录时进入s32;
88.s30:自动发送指令至所述电动调整架进行调整,方向为正向,步长
89.s31:添加或更新调试记录,进入s39;
90.s32:判断调试方向,为正向调试时进入s33,为反向调试时进入s35;
91.s33:自动发送指令所述电动调整架进行调整,方向为反向,步长h=p;
92.s34:添加或更新调试记录,进入s39;
93.s35:自动发送指令进行调整,方向为正向,步长
94.s36:添加或更新调试记录,进入s39;
95.s37:判断是否有指令发送记录,有指令发送记录时进入s38,无指令发送记录时进入s39;
96.s38:清除调试记录,进入s39;
97.s39:结束本次指令调试,等待数据失调分析结果。
98.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。